Основные характеристики датчиков
Функционируя по своему прямому назначению, любой датчик может быть подвержен воздействию самых разных физических факторов: температуры, давления, влажности, света, вибрации, радиации и т. д. При этом отчетливо воспринимать и измерять датчик должен лишь одну конкретную величину, которая называется, применительно к датчику, естественной измеряемой величиной. Обозначим ее буквой «А». Выходную же величину датчика обозначим буквой «В».
Тогда функциональная зависимость выходной величины датчика В от естественной измеряемой величины А, в статических условиях, будет называться статической характеристикой данного датчика S. Статическая характеристика датчика может быть выражена в форме таблицы, графика или в аналитическом виде.

Статическая чувствительность датчика
Среди характеристик любого датчика главной является статическая чувствительность датчика S. Она выражается как отношение малого приращения выходной величины В к малому приращению соответствующей естественной измеряемой величины А в статических условиях. Например В/А (вольт на ампер), если имеется ввиду резистивный датчик тока.
Данное выражение схоже с понятием коэффициента усиления для электронных устройств, который в принципе можно было бы назвать коэффициентом чувствительности или градиентом измеряемой величины.
Динамическая чувствительность датчика
Если условия работы датчика не статичны, если при изменениях наблюдается «инерционность», то речь можно вести о динамической чувствительности датчика Sd, которая выражается как отношение скорости изменения выходной величины датчика к скорости изменения соответствующей естественной измеряемой величины (входной величины). Например вольт в секунду / Ом в секунду, если имеется ввиду датчик температуры, выходное сопротивление которого изменяется в зависимости от измеряемой температуры.
Порог чувствительности датчика
Минимальное изменение естественной измеряемой величины, которое способно привести к реальному изменению выходной величины датчика, называют порогом чувствительности датчика. Например, порог чувствительности датчика температуры в 0,5 градуса означает, что меньшее изменение температуры (например на 0,1 градуса) на выходной величине датчика может вовсе никак не отразиться.
Нормальные условия эксплуатации датчика
Все эти параметры, как правило, регламентированы в документации для нормальных условий эксплуатации измерительного прибора. Под нормальными условиями понимают температуру окружающей среды в районе +25°С, атмосферное давление в районе 750 мм.рт.ст., относительную влажность воздуха в районе 65%, а также отсутствие вибраций и существенных электромагнитных полей. Допуски относительно отклонений от нормальных условий эксплуатации также указываются в документации на прибор.

Погрешность датчика
Любой датчик имеет дополнительные погрешности, которые могут быть вызваны изменением внешних условий, их значительным отклонением от нормальных условий. Данные погрешности выражаются в доле (выраженной в процентах) естественной измеряемой величины, отнесенной к изменению внешнего параметра, который не измеряется данным датчиком по его назначению. Например, погрешность 1% на 10°С температуры окружающей среды для датчика деформации или погрешность 1% на 10Э внешнего магнитного поля для датчика температуры.

Сегодня промышленностью выпускаются самые разные датчики: тока, магнитного поля, температуры, давления, влажности, деформации (тензометрические датчики), радиации, фотометрические, перемещения и т. д. Датчики различаются между собой по технологии изготовления: они бывают твердотельными, пленочными, мдп (металл-диэлектрик-полупроводник) и т. д. По выходному электрическому параметру встречаются: резистивные, емкостные, индуктивные датчики и т. д.
И хотя физических параметров, которые могут быть измерены при помощи датчиков, не счесть, в основе всех датчиков так или иначе лежат сенсоры, воспринимающие одно из нескольких физических воздействий: давление или деформацию, магнитное поле, температуру, свет, химическое действие газа и т. п.
Андрей Повный, Филиал БГТУ ГГПК
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Чувствительность пьезорезистивных датчиков давления

Пьезорезистивные датчики давления отличаются высокой чувствительностью. Они точны и миниатюрны. Поговорим об их чувствительности. Пользователи пьезорезистивных датчиков давления ожидают линейного отклика, при котором выходной сигнал пропорционален приложенному давлению. Поэтому кривая диаграммы давления-сигнала должна быть прямой линией, начальная точка которой обозначена нулевым положением, а ее чувствительность — наклонной. Но в реальности форма кривой давления-сигнала обычно показывает резкое отклонение от идеальной линии. Это несоответствие известно как ошибка линейности датчика давления. Зато дуга кривой соответствует его чувствительности.
Из иллюстрации видно, что практически линейная часть кривой соответствует более низкой чувствительности (около 70% от номинального давления стружки). Можно подобрать передатчики с очень низкой нелинейностью (например, 0,05% полной шкалы). Но рабочий диапазон должен находиться в пределах линейной части чипа.
Чувствительность пьезорезистивных датчиков давления
- удельное сопротивление рассеянных полупроводниковых резисторов и уровень их пьезорезистивной эффективности,
- толщина кремниевой диафрагмы.
Наибольшее влияние на чувствительность оказывает толщина кремниевой диафрагмы. Это обусловлено ее механической, химической или же комбинированной обработкой. Данные процессы невозможно контролировать настолько точно, чтобы все измерительные ячейки имели одинаковую чувствительность. Поэтому определены классы датчиков давления для определенных диапазонов. В пределах класса чувствительность может варьироваться примерно на ± 20%. Такое отклонение компенсируется в электронике через ток питания или коэффициент усиления (калибровка).
Линейность пьезорезистивных датчиков давления
В спецификациях линейность обычно выражается в % FS (полная шкала). Что касается измеряемых значений, ошибка может оказаться критичной, даже если в спецификации производителя указана очень небольшая величина, несмотря на отображение в % FS.
В измерительных ячейках линейность зависит от нескольких факторов:
- полупроводниковые резисторы должны быть достаточно маленькими и рассеиваться точно в правильном месте на кремниевой диафрагме,
- кремниевая диафрагма должна быть чистой, с острыми краями и точно в нужном месте,
- линейность меняется независимо от того, измеряется ли положительное или отрицательное давление, то есть диафрагма приобретает вогнутую или выпуклую форму (растягивающая или сжимающая нагрузка),
- определенное соотношение диаметра и толщины кремниевой диафрагмы. Очень тонкие диафрагмы будут деформироваться при наложенном растяжении: этот баллонный эффект в преобразователях для более низких диапазонов давления приводит к типично S-образному ходу кривой линейности (который не может быть исправлен аналоговыми методами компенсации).
- очень толстые кремниевые диафрагмы невозможно жестко закрепить на ее краях, как того требует предполагаемая структура: например, в случае с датчиком 1000 бар мембрана вдвое толще, чем сам чип.
Перегрузка и давление разрыва пьезорезистивных датчиков
Типичный ход кривой линейности по большей части довольно прямой, а затем более сплюснутый. Для получения максимально широкого выходного сигнала нужна максимально возможная протяженность этой кривой. До отметки около двух третей курс является настолько линейным, что ошибка составляет менее 0,5% полной шкалы. Более того, погрешность линейности становится все более доминирующей, так что устанавливается предел точности. Независимо от предельно низких и высоких значений, номинальный диапазон давления может быть превышен примерно на 50% чтобы вывести измерительную ячейку из строя.
Чтобы повысить защиту от перегрузок, необходимо отказаться от идеи широкого эффективного сигнала: лучше использовать датчик давления, который сам по себе предназначен для более высокого диапазона. Например, в емкостных датчиках давления можно установить механический упор для деформации мембраны под давлением и обеспечения мощной защиты от перегрузки, но это вряд ли возможно для сравнительно крошечных кремниевых мембран пьезорезистивных датчиков давления с их минимальным прогибом.
Производитель STS определяет давление разрыва как давление, при котором среда может попасть в датчик и разрушить металлическую диафрагму, тем самым вывести датчик из строя. Именно в таким расчетом изготавливаются корпуса погружных датчиков, кабельные разъемы и кабели. Таким образом, значения давления разрыва преобразователя в техническом описании оказываются незначительны.
Раздел 2. Измерительные преобразователи систем
Раздел 2. Измерительные преобразователи систем (датчики) Тема 2.1 Классификация и характеристики датчиков 1. Определение и классификация датчиков 2. Виды электрических датчиков 3. Преобразующие устройства 1. Автоматизация производственных процессов может успешно осуществляться только при наличии современных технических средств, создание которых должно базироваться на новейших достижениях науки и техники. К этим средствам автоматики можно отнести датчики, преобразователи, усилители, задающие устройства, исполнительные органы и т. д. Метрологические характеристики датчиков определяют приведенные ниже основные параметры. Статическая характеристика датчика представляет собой зависимость изменения выходной величины от входной величины у = f (х), [2.1]
Рекомендуемые материалы
Гидравлический пресс 3.2 МН (для горячей объёмной штамповки)
Автоматизация проектирования кузнечно-штамповочного оборудования (АПКШО) (МТ-6)
Отчет по лабораторной работе №1 «Построение модели изделия в PDM системе» (вариант №6)
Автоматизация управления жизненным циклом продукции
МУ к лабораторным работам по приборно-технологическому моделированию в системе TCAD Sentaurus
Автоматизация проектирования электронных средств
ЛР №2 — Оптимизация паровоздушного молота
Автоматизация проектирования кузнечно-штамповочного оборудования (АПКШО) (МТ-6)
Моделирование кузнечно-штамповочного оборудования средствами программного комплекса анализа динамических систем ПА9
Автоматизация проектирования кузнечно-штамповочного оборудования (АПКШО) (МТ-6)
дз1 и дз2 АПЭС 11 вариант
Автоматизация проектирования электронных средств
где х — входная величина; у — выходная величина. Чувствительность датчика — отношение приращения выходной величины к приращению входной величины S = Ау/Ах [2.2] Порог чувствительности датчика — наименьшее значение входной величины, которое вызывает появление сигнала на выходе. Этот параметр связан с зоной нечувствительности, т. е. зоной, в пределах которой при наличии входного сигнала на выходе датчика сигнал отсутствует. Инерционность датчика — время, в течение которого выходная величина принимает значение, соответствующее входной величине. Классификация датчиков: По характеру получения сигнала от измеряемой величины датчики разделяют на параметрические, в которых изменение измеряемой величины вызывает изменение какого-либо параметра (например, изменение сопротивления, давления, индуктивности, и генераторные, у которых изменение измеряемой величины вызывает генерацию сигнала (появление термо-ЭДС, фототока). По характеру зависимости выходного сигнала от входного различают датчики: — пропорциональные (сигнал на выходе пропорционален измеряемой величине); — нелинейные (сигнал на выходе нелинейно зависит от сигнала на входе); — релейные, в которых сигнал на выходе изменяется скачкообразно; — циклические, у которых сигнал на выходе пропорционален измеряемой величине или нелинейно зависит и повторяется циклически; — импульсные, у которых изменение входной величины вызывает появление сигналов (импульсов), число которых пропорционально измеряемой величине. По виду преобразования сигналов датчики могут быть: · электроконтактные, где механическая сила преобразуется в электрический сигнал; · индуктивные, у которых изменение магнитной проницаемости вызывает изменение индуктивности; · фотоэлектрические, в которых световой сигнал преобразуется в электрический; тензометрические, в которых механическая сила вызывает изменение сопротивления; · гидравлические, в которых механические силы преобразуются в гидравлический сигнал, и т. д. По назначению в системах автоматического управления датчики можно разделить на датчики пути и положения, скорости, силовые, углового положения или угла рассогласования и т. д. Так как датчики можно рассматривать как составные элементы систем управления, удобнее их классифицировать по назначению. 2. Датчики пути и положения рабочих органов обеспечивают создание управляющих сигналов в зависимости от пройденного пути или положения рабочих органов управляемого объекта. 
 Электроконтактные датчики представляют собой конечные, путевые выключатели, микропереключатели (Рисунок 14). У датчиков имеются штоки или рычаги 2, которые воздействуют через механизм передачи на контакты 1. Принцип действия датчиков основан на том, что их устанавливают на неподвижных частях рабочих органов в определенном положении, а движущиеся рабочие органы, на которых укреплены кулачки, достигнув заданного положения, воздействуют на датчики, вызывая их срабатывание.
Электроконтактные датчики представляют собой конечные, путевые выключатели, микропереключатели (Рисунок 14). У датчиков имеются штоки или рычаги 2, которые воздействуют через механизм передачи на контакты 1. Принцип действия датчиков основан на том, что их устанавливают на неподвижных частях рабочих органов в определенном положении, а движущиеся рабочие органы, на которых укреплены кулачки, достигнув заданного положения, воздействуют на датчики, вызывая их срабатывание.  Индуктивные датчики. Принцип их действия основан на изменении индуктивности катушки с подвижным якорем вследствие изменения магнитной проницаемости. Индуктивные датчики, как и электроконтактные, можно использовать как датчики пути или положения и как размерные (Рисунок 15). В датчике (Рисунок 15, а) якорь 1 перемещается.
Индуктивные датчики. Принцип их действия основан на изменении индуктивности катушки с подвижным якорем вследствие изменения магнитной проницаемости. Индуктивные датчики, как и электроконтактные, можно использовать как датчики пути или положения и как размерные (Рисунок 15). В датчике (Рисунок 15, а) якорь 1 перемещается.  Индуктивный дифференциальный датчик (Рисунок 15, б) состоит из двух катушек 2, 4 на которых расположены обмотки, подключаемые по дифференциальной схеме . В катушках расположен сердечник 3, соединенный с измерительным штоком 1, который контактирует с измеряемой поверхностью.
Индуктивный дифференциальный датчик (Рисунок 15, б) состоит из двух катушек 2, 4 на которых расположены обмотки, подключаемые по дифференциальной схеме . В катушках расположен сердечник 3, соединенный с измерительным штоком 1, который контактирует с измеряемой поверхностью.  Вращающиеся (поворотные) трансформаторы. На статоре и роторе вращающегося трансформатора размещены по две распределенные обмотки, магнитные оси которых взаимно перпендикулярны (Рисунок 16). Ротор вращающегося трансформатора может поворачиваться на некоторый угол, произвольный по отношению к статору.
Вращающиеся (поворотные) трансформаторы. На статоре и роторе вращающегося трансформатора размещены по две распределенные обмотки, магнитные оси которых взаимно перпендикулярны (Рисунок 16). Ротор вращающегося трансформатора может поворачиваться на некоторый угол, произвольный по отношению к статору.  Принцип действия вращающегося трансформатора основан на изменении коэффициентов взаимоиндукции между обмотками статора и ротора при повороте ротора. В качестве датчиков угла используют синусно-косинусные вращающиеся трансформаторы (СКВТ), у которых зависимость коэффициентов взаимоиндукции от угла поворота ротора носит характер синусоиды и косинусоиды, и линейные вращающиеся трансформаторы (Л ВТ), у которых указанная зависимость, линейная. В зависимости от схемы включения выходным сигналом вращающегося трансформатора может быть амплитуда переменного напряжения или угол сдвига фаз между напряжениями. Соответственно этому режим работы вращающегося трансформатора называется амплитудным, или режимом фазовращателя. Наибольшее распространение из вращающихся трансформаторов с электрической редукцией получили редуктосины и индуктосины.
Принцип действия вращающегося трансформатора основан на изменении коэффициентов взаимоиндукции между обмотками статора и ротора при повороте ротора. В качестве датчиков угла используют синусно-косинусные вращающиеся трансформаторы (СКВТ), у которых зависимость коэффициентов взаимоиндукции от угла поворота ротора носит характер синусоиды и косинусоиды, и линейные вращающиеся трансформаторы (Л ВТ), у которых указанная зависимость, линейная. В зависимости от схемы включения выходным сигналом вращающегося трансформатора может быть амплитуда переменного напряжения или угол сдвига фаз между напряжениями. Соответственно этому режим работы вращающегося трансформатора называется амплитудным, или режимом фазовращателя. Наибольшее распространение из вращающихся трансформаторов с электрической редукцией получили редуктосины и индуктосины. 
 Линейный индуктосин (Рисунок 17) состоит из набора измерительных шкал 1 и ползуна 2, монтируемых на рабочих органах. Измерительная шкала индуктосина укреплена на неподвижной части и представляет собой стальную линейку, на которой на соответствующую изолирующую подложку печатным способом нанесена зигзагообразная обмотка с шагом 2 мм. Ползун 2, укрепленный на подвижной части, является якорем и состоит из двух таких же, но более коротких обмоток, сдвинутых на 1/4 шага относительно друг друга. На выходе обмоток якоря индуцируется циклический сигнал. Число циклов определяется числом пройденных шагов. В промышленности применяют также круговые индуктосины. Фотоэлектрические датчики (Рисунок 18) представляют собой обычное фотореле, установленное на рабочих органах в определенном положении. Движущийся рабочий орган (ДРО), переместившись в установленное положение, экраном прерывает поток света Ф, вызывая срабатывание фотореле (ФР). В промышленности применяют также размерные фотоэлектрические датчики. Размерный датчик (Рисунок 18, б) состоит из диска, который соединен с ДРО. На диске нанесены штрихи или прорези с определенным шагом t. При движении рабочего органа штрихи на диске прерывают световой поток Ф, вызывая срабатывание фотореле.
Линейный индуктосин (Рисунок 17) состоит из набора измерительных шкал 1 и ползуна 2, монтируемых на рабочих органах. Измерительная шкала индуктосина укреплена на неподвижной части и представляет собой стальную линейку, на которой на соответствующую изолирующую подложку печатным способом нанесена зигзагообразная обмотка с шагом 2 мм. Ползун 2, укрепленный на подвижной части, является якорем и состоит из двух таких же, но более коротких обмоток, сдвинутых на 1/4 шага относительно друг друга. На выходе обмоток якоря индуцируется циклический сигнал. Число циклов определяется числом пройденных шагов. В промышленности применяют также круговые индуктосины. Фотоэлектрические датчики (Рисунок 18) представляют собой обычное фотореле, установленное на рабочих органах в определенном положении. Движущийся рабочий орган (ДРО), переместившись в установленное положение, экраном прерывает поток света Ф, вызывая срабатывание фотореле (ФР). В промышленности применяют также размерные фотоэлектрические датчики. Размерный датчик (Рисунок 18, б) состоит из диска, который соединен с ДРО. На диске нанесены штрихи или прорези с определенным шагом t. При движении рабочего органа штрихи на диске прерывают световой поток Ф, вызывая срабатывание фотореле. 
 Измеренное перемещение AL = nt, где п — число срабатывания фотореле; t — цена деления шага. Имеются датчики, у которых в качестве измерительных шкал применяют линейки с нанесенными штрихами.
Измеренное перемещение AL = nt, где п — число срабатывания фотореле; t — цена деления шага. Имеются датчики, у которых в качестве измерительных шкал применяют линейки с нанесенными штрихами. 
 Гидравлические датчики представляют собой обычный управляющий гидрораспределитель поршневого или кранового типа (Рисунок 19). Принцип их действия основан на том, что движущиеся рабочие органы, на которых размещены кулачки или упоры 1, достигнув положения, где установлен датчик, воздействуют на него, вызывая сбрасывание. Управляющий гидрораспределитель обеспечивает сигнал исполнительному органу (гидродвигателю).
Гидравлические датчики представляют собой обычный управляющий гидрораспределитель поршневого или кранового типа (Рисунок 19). Принцип их действия основан на том, что движущиеся рабочие органы, на которых размещены кулачки или упоры 1, достигнув положения, где установлен датчик, воздействуют на него, вызывая сбрасывание. Управляющий гидрораспределитель обеспечивает сигнал исполнительному органу (гидродвигателю). 

 Пневматические датчики аналогично гидравлическим выполнены в виде пневмораспределителей кранового типа (Рисунок 20), дросселей или клапанов. Широкое распространение получили размерные пневматические дифференциальные датчики мембранного и сильфонного типа с электроконтактным выходом.
Пневматические датчики аналогично гидравлическим выполнены в виде пневмораспределителей кранового типа (Рисунок 20), дросселей или клапанов. Широкое распространение получили размерные пневматические дифференциальные датчики мембранного и сильфонного типа с электроконтактным выходом. 

Датчики углового положения создают управляющий сигнал в зависимости от углового положения или угла рассогласования между рабочими органами.  Потенциометрический датчик (Рисунок 21) состоит из каркаса 1 с обмоткой 2, по которой скользит движок 3. Для съема сигнала с перемещающегося движка служит добавочная щетка 4, скользящая по токосъемному кольцу 5. Выходное напряжение датчика угловых перемещений пропорционально углу поворота подвижной части первичного измерителя, соединенного с осью движка.
Потенциометрический датчик (Рисунок 21) состоит из каркаса 1 с обмоткой 2, по которой скользит движок 3. Для съема сигнала с перемещающегося движка служит добавочная щетка 4, скользящая по токосъемному кольцу 5. Выходное напряжение датчика угловых перемещений пропорционально углу поворота подвижной части первичного измерителя, соединенного с осью движка. 
 Сельсины. Сельсины представляют собой трансформаторы с воздушным зазором, у которых при вращении ротора происходит плавное изменение величины ЭДС, наведенной в обмотке ротора. Обычно сельсины работают в паре: сельсин, связанный с ведомым валом, называют сельсином-приемником, а сельсин, связанный с ведущим валом, — сельсином-датчиком (Рисунок 22).
Сельсины. Сельсины представляют собой трансформаторы с воздушным зазором, у которых при вращении ротора происходит плавное изменение величины ЭДС, наведенной в обмотке ротора. Обычно сельсины работают в паре: сельсин, связанный с ведомым валом, называют сельсином-приемником, а сельсин, связанный с ведущим валом, — сельсином-датчиком (Рисунок 22).  Однофазная обмотка сельсина расположена на статоре, а трехфазная — на роторе. Трехфазная обмотка состоит из трех катушек, сдвинутых относительно друг друга на 120°. Они уложены в пазы ротора и соединены в звезду. Концы фазовых (1ф, 2ф, Зф) обмоток выведены на три контактных кольца, расположенных на валу ротора. Датчики скорости создают управляющие сигналы в зависимости от скорости. Более широкое распространение в машиностроении получили описанные ниже датчики. Тахогенераторы служат для измерения частоты вращения. В зависимости от рода тока различают тахогенераторы постоянного и переменного тока. Тахогенераторы постоянного тока разделяют по способу возбуждения на тахогенераторы с возбуждением от постоянных магнитов (Рисунок 23, а) и с электромагнитным возбуждением. Представляют собой малогабаритную машину постоянного тока. По принципу действия тахогенераторы переменного тока делят на синхронные и асинхронные. Более широкое распространение получили асинхронные тахогенераторы (Рисунок 23, б). Тахогенератор имеет две обмотки: обмотку возбуждения ОВ и выходную обмотку.
Однофазная обмотка сельсина расположена на статоре, а трехфазная — на роторе. Трехфазная обмотка состоит из трех катушек, сдвинутых относительно друг друга на 120°. Они уложены в пазы ротора и соединены в звезду. Концы фазовых (1ф, 2ф, Зф) обмоток выведены на три контактных кольца, расположенных на валу ротора. Датчики скорости создают управляющие сигналы в зависимости от скорости. Более широкое распространение в машиностроении получили описанные ниже датчики. Тахогенераторы служат для измерения частоты вращения. В зависимости от рода тока различают тахогенераторы постоянного и переменного тока. Тахогенераторы постоянного тока разделяют по способу возбуждения на тахогенераторы с возбуждением от постоянных магнитов (Рисунок 23, а) и с электромагнитным возбуждением. Представляют собой малогабаритную машину постоянного тока. По принципу действия тахогенераторы переменного тока делят на синхронные и асинхронные. Более широкое распространение получили асинхронные тахогенераторы (Рисунок 23, б). Тахогенератор имеет две обмотки: обмотку возбуждения ОВ и выходную обмотку. 
 Реле контроля скорости (РКС) (Рисунок 24) состоит из постоянного магнита 3, который находится на валу (сигнал на входе), а также кольца 4, в котором расположена обмотка типа «беличье колесо». На другом валу, соединенном с кольцом, расположен толкатель 1, воздействующий на группу контактов К1, К2, которые возвращаются в исходное положение под действием пружин 2 и 5. При вращении вала РКС вращающийся магнит наводит в обмотке, расположенной в кольце, ЭДС. Ток, протекая по обмотке, взаимодействует с магнитным потоком вращающегося магнита, в результате создается вращающий момент, который, поворачивая кольцо с толкателем, воздействует на контакты и вызывает их срабатывание. Силовые датчики обеспечивают создание управляющих сигналов в зависимости от сил, создаваемых в рабочих органах.
Реле контроля скорости (РКС) (Рисунок 24) состоит из постоянного магнита 3, который находится на валу (сигнал на входе), а также кольца 4, в котором расположена обмотка типа «беличье колесо». На другом валу, соединенном с кольцом, расположен толкатель 1, воздействующий на группу контактов К1, К2, которые возвращаются в исходное положение под действием пружин 2 и 5. При вращении вала РКС вращающийся магнит наводит в обмотке, расположенной в кольце, ЭДС. Ток, протекая по обмотке, взаимодействует с магнитным потоком вращающегося магнита, в результате создается вращающий момент, который, поворачивая кольцо с толкателем, воздействует на контакты и вызывает их срабатывание. Силовые датчики обеспечивают создание управляющих сигналов в зависимости от сил, создаваемых в рабочих органах. 

 Электромеханические датчики. Один из видов электромеханического силового датчика (Рисунок 25) представляет собой кулачковую муфту 2 со скошенными зубьями, замыкающуюся под действием пружины 5. Одна из полумуфт сидит на валу со скользящей шпонкой. Полумуфта через рычаг 4 воздействует на микропереключатель 1. При возникновении на валу заданных сил сдвинутая полумуфта, воздействуя через рычаг на микровыключатель, вызывает его срабатывание.
Электромеханические датчики. Один из видов электромеханического силового датчика (Рисунок 25) представляет собой кулачковую муфту 2 со скошенными зубьями, замыкающуюся под действием пружины 5. Одна из полумуфт сидит на валу со скользящей шпонкой. Полумуфта через рычаг 4 воздействует на микропереключатель 1. При возникновении на валу заданных сил сдвинутая полумуфта, воздействуя через рычаг на микровыключатель, вызывает его срабатывание. 
 Токовое реле (Рисунок 26) состоит из токовой катушки 1, рычага 2 и контактов К1, К2. Токовая катушка включена в цепь электродвигателя, приводящего в движение рабочий орган, сила которого контролируется. При увеличении силы в рабочем органе увеличивается сила тока двигателя, который приводит в движение рабочий орган, это, в свою очередь, вызывает увеличение силы тока в токовой катушке реле, и электромагнитная сила Fэм токовой катушки становится больше, чем сила пружины 3 Fnp (силу пружины устанавливают с помощью регулировочного винта). Произойдет опрокидывание рычага, который, воздействуя на контакты, вызовет их срабатывание.
Токовое реле (Рисунок 26) состоит из токовой катушки 1, рычага 2 и контактов К1, К2. Токовая катушка включена в цепь электродвигателя, приводящего в движение рабочий орган, сила которого контролируется. При увеличении силы в рабочем органе увеличивается сила тока двигателя, который приводит в движение рабочий орган, это, в свою очередь, вызывает увеличение силы тока в токовой катушке реле, и электромагнитная сила Fэм токовой катушки становится больше, чем сила пружины 3 Fnp (силу пружины устанавливают с помощью регулировочного винта). Произойдет опрокидывание рычага, который, воздействуя на контакты, вызовет их срабатывание.  Тензометрические датчики сопротивления предназначены для определения упругих деформаций деталей машин и конструкций в линейном и плосконапряженном состоянии при воздействии на них статических и динамических нагрузок.
Тензометрические датчики сопротивления предназначены для определения упругих деформаций деталей машин и конструкций в линейном и плосконапряженном состоянии при воздействии на них статических и динамических нагрузок.  На полосу тонкой прочной бумаги наклеена уложенная зигзагообразно тонкая проволока (Рисунок 27). К концам проволоки с помощью пайки или сварки присоединены выводы из медной фольги, с помощью которых датчик подключен в измерительную
На полосу тонкой прочной бумаги наклеена уложенная зигзагообразно тонкая проволока (Рисунок 27). К концам проволоки с помощью пайки или сварки присоединены выводы из медной фольги, с помощью которых датчик подключен в измерительную
цепь. Тензодатчик приклеивают к испытуемой детали, благодаря чему деформацию детали воспринимает проволочная решетка. Длина детали, занимаемая проволокой, называется измерительной базой датчика L.  Пьезоэлектрические датчики для измерения сил представляют собой кварцевую пластину 1 (Рисунок 28). С двух сторон ее напылены или приклеены токопроводящим клеем электроды 2, с которых снимается выходное напряжение.
Пьезоэлектрические датчики для измерения сил представляют собой кварцевую пластину 1 (Рисунок 28). С двух сторон ее напылены или приклеены токопроводящим клеем электроды 2, с которых снимается выходное напряжение.  Два электрода и кварцевый диэлектрик образуют конденсатор, на электродах которого присутствуют электрические заряды, возникающие вследствие пьезоэлектрического эффекта при сжатии кварцевой пластины силой Р. 3. Преобразующие устройства служат для преобразования управляющих и информационных сигналов в устройствах автоматики к виду, удобному для их последующей обработки или фиксации. Преобразующие устройства должны иметь малую инерционность и хорошую согласованность с другими узлами автоматики, достаточно высокое быстродействие. Реле времени (РВ) обеспечивает при подаче сигнала на вход хвх(t) получение сигналов на выходе хвых (t + T1) . хвых (t + Tk), разнесенных по времени (сдвинутых на время Т1 — Tk ).
Два электрода и кварцевый диэлектрик образуют конденсатор, на электродах которого присутствуют электрические заряды, возникающие вследствие пьезоэлектрического эффекта при сжатии кварцевой пластины силой Р. 3. Преобразующие устройства служат для преобразования управляющих и информационных сигналов в устройствах автоматики к виду, удобному для их последующей обработки или фиксации. Преобразующие устройства должны иметь малую инерционность и хорошую согласованность с другими узлами автоматики, достаточно высокое быстродействие. Реле времени (РВ) обеспечивает при подаче сигнала на вход хвх(t) получение сигналов на выходе хвых (t + T1) . хвых (t + Tk), разнесенных по времени (сдвинутых на время Т1 — Tk ). 
 Электронные реле времени. Схема простейшего электронного реле времени показана на рисунке 29. При замыкании управляющего контакта К1 (сигнал на входе) одновременно подается напряжение на базу транзистора VT1 и катушку реле К2. Так как в начальный момент конденсатор С1 не заряжен, то на базу транзистора подается положительный потенциал через делитель напряжения R1—R2. Транзистор закрыт и катушка реле отключена (сигнал на выходе). Когда конденсатор начнет заряжаться через цепь С1—R2—К1, отрицательный потенциал конденсатора будет подаваться на базу транзистора и транзистор откроется, вызвав срабатывание реле.
Электронные реле времени. Схема простейшего электронного реле времени показана на рисунке 29. При замыкании управляющего контакта К1 (сигнал на входе) одновременно подается напряжение на базу транзистора VT1 и катушку реле К2. Так как в начальный момент конденсатор С1 не заряжен, то на базу транзистора подается положительный потенциал через делитель напряжения R1—R2. Транзистор закрыт и катушка реле отключена (сигнал на выходе). Когда конденсатор начнет заряжаться через цепь С1—R2—К1, отрицательный потенциал конденсатора будет подаваться на базу транзистора и транзистор откроется, вызвав срабатывание реле. 
 Реле времени двигателя (Рисунок 30) состоит из двигателя М, редуктора Р, барабана Б, на котором расположены кулачки а—е и контакты К1 — К6, установленные напротив кулачков. При подаче сигнала на вход (включение двигателя) барабан начинает вращаться; движущиеся кулачки на барабане воздействуют на контакты, вызывая их срабатывание (сигнал на выходе). Меняя угловое положение кулачков, можно устанавливать время и очередность срабатывания контактов.
Реле времени двигателя (Рисунок 30) состоит из двигателя М, редуктора Р, барабана Б, на котором расположены кулачки а—е и контакты К1 — К6, установленные напротив кулачков. При подаче сигнала на вход (включение двигателя) барабан начинает вращаться; движущиеся кулачки на барабане воздействуют на контакты, вызывая их срабатывание (сигнал на выходе). Меняя угловое положение кулачков, можно устанавливать время и очередность срабатывания контактов. 
 Реле счета импульсов (РСИ) выдает сигнал на выходе при поступлении заданного числа сигналов на входе хвх— Необходимость преобразования сигнала часто возникает при создании команды после определенного числа повторяющихся действий (число ходов, операций и т. д.). Электроконтактное РСИ (Рисунок 31) состоит из ручного переключателя SA1, шагового искателя ШИ и реле К1, которое служит для выдачи команды на выходе. С помощью SA1 задается число повторяемых команд. При использовании первой команды замыкается контакт SQ1 (сигнал на входе), и включенная катушка шагового искателя через храповой механизм вызывает перемещение контакта шагового искателя из нулевого в первое положение и т. д. При выполнении заданного числа команд ручным переключателем контакт шагового искателя занимает позицию контакта ручного переключателя. Цепь катушки реле замкнется, реле сработает (сигнал на выходе).
Реле счета импульсов (РСИ) выдает сигнал на выходе при поступлении заданного числа сигналов на входе хвх— Необходимость преобразования сигнала часто возникает при создании команды после определенного числа повторяющихся действий (число ходов, операций и т. д.). Электроконтактное РСИ (Рисунок 31) состоит из ручного переключателя SA1, шагового искателя ШИ и реле К1, которое служит для выдачи команды на выходе. С помощью SA1 задается число повторяемых команд. При использовании первой команды замыкается контакт SQ1 (сигнал на входе), и включенная катушка шагового искателя через храповой механизм вызывает перемещение контакта шагового искателя из нулевого в первое положение и т. д. При выполнении заданного числа команд ручным переключателем контакт шагового искателя занимает позицию контакта ручного переключателя. Цепь катушки реле замкнется, реле сработает (сигнал на выходе).  Дешифраторы служат для преобразования кода числа, поступающего на его вход, в управляющий сигнал только на одном из его выходов. Схема простейшего дешифратора, формирующая какой-либо один из четырех управляющих сигналов () (четыре различных адреса), состоит из регистра адреса, построенного на триггере первого (T1), второго (Т2) разрядов, и логических элементов (DD0-DD7). А0—A3 — управляющие сигналы (адреса). Запись и выдача управляющих сигналов происходят по адресу, записанному в регистре.
Дешифраторы служат для преобразования кода числа, поступающего на его вход, в управляющий сигнал только на одном из его выходов. Схема простейшего дешифратора, формирующая какой-либо один из четырех управляющих сигналов () (четыре различных адреса), состоит из регистра адреса, построенного на триггере первого (T1), второго (Т2) разрядов, и логических элементов (DD0-DD7). А0—A3 — управляющие сигналы (адреса). Запись и выдача управляющих сигналов происходят по адресу, записанному в регистре.  Реле с герконом (Рисунок 33) представляет собой контактную систему, взаимодействующую с внешним магнитным полем. Геркон 1 (герметический контакт) или герконы размещаются внутри катушки 2 (обмотки) реле. Геркон представляет собой миниатюрную стеклянную трубку 3 (баллон) с впаянными внутри нее двумя контактными пружинами 4 из магнитомягкого ферромагнитного материала (пермаллоя). При подаче тока в обмотку реле возникает магнитный поток, намагничивающий контактные пружины геркона. Между ними возникает электромагнитная сила и контакты замыкаются.
Реле с герконом (Рисунок 33) представляет собой контактную систему, взаимодействующую с внешним магнитным полем. Геркон 1 (герметический контакт) или герконы размещаются внутри катушки 2 (обмотки) реле. Геркон представляет собой миниатюрную стеклянную трубку 3 (баллон) с впаянными внутри нее двумя контактными пружинами 4 из магнитомягкого ферромагнитного материала (пермаллоя). При подаче тока в обмотку реле возникает магнитный поток, намагничивающий контактные пружины геркона. Между ними возникает электромагнитная сила и контакты замыкаются.
Тема 2.2 Схемы включения датчиков 1. Мостовые измерительные схемы 2. Компенсационная и дифференциальная схемы 1. Существующие методы электрических измерений можно в основном разделить на два класса: непосредственной оценки и сравнения. При непосредственной оценке измерительная схема выполняет лишь функции преобразования выходного сигнала датчика, например, усиливает его или согласует выходное сопротивление датчика с входным сопротивлением прибора. Этот метод прост, но применяется редко, так как ему свойственны значительные погрешности (особенно при изменении напряжения питания датчика). Метод сравнения обеспечивает более высокие точность и чувствительность. При этом используются мостовые, дифференциальные и компенсационные схемы измерения. Мостовые измерительные схемы применяют постоянного и переменного тока. Существуют мостовые схемы уравновешенные и неуравновешенные схемы. Уравновешенные мосты требуют ручной или автоматической балансировки, в то время как неуравновешенные мосты не требуют Уравновешенный мост представляет собой схему (Рисунок 34, а), состоящую из ромба, образуемого четырьмя сопротивлениями R1 R2, R3, Rt. Резисторы в схеме называют ветвями или плечами моста. Помимо этого в мостовую схему включены источник тока со своим сопротивлением RE и измерительный прибор с сопротивлением Rnp. В четырехугольнике также есть две диагонали, в одну из которых включен миллиамперметр, а в другую — источник тока. Для подстройки моста одно плечо (R3) является переменным сопротивлением. Закон уравновешенного моста: произведение сопротивлений противолежащих плеч должны быть равны. R1/R2=R3/Rt.или R1·Rt=R2·R3 [2.3] Если необходимо вычислить неизвестное сопротивление датчика, то можно включить его в одно из плеч моста, вместо резистора R4· и воспользоваться формулой: Rt=R2·R3/R1 [2.4] Ток в диагонали моста, содержащей измерительный прибор, через напряжение питания: Inp=U(R1Rt-R2R3)/M [2.5] Основной характеристикой любой схемы является ее чувствительность. Она определяется как отношение приращения тока в измерительной диагонали ∆Inp к вызвавшему его изменению сопротивления одного из плеч моста: Sсх =∆Inp /∆R [2.6] ∆Inp=U∆RRt/M [2.7] где ∆Inp — результирующий ток в диагонали моста, содержащей измерительный прибор, A; U — напряжение питания, В; М — входное напряжение, В. Неуравновешенный мост представляет собой схему (Рисунок 34, б), состоящую из ромба, образуемого четырьмя сопротивлениями R1 R2, R3, R5, Rt. Помимо этого в мостовую схему включены источник тока со своим сопротивлением RE и измерительный прибор с сопротивлением Rnp. Для подстройки моста одно плечо (R5) является переменным сопротивлением. 
 б) б) |
  а) а) |
В качестве измерительного прибора в неуравновешенных мостах используются амперметры (так как токи невелики, то обычно мили- и микроамперметры). Неуравновешенный мост подчиняется тем же законам, что и уравновешенный. 2. Компенсационные схемы используют для измерения неэлектрических величин, которые преобразуются датчиками в ЭДС или напряжение. Сигнал датчика сравнивается с компенсирующим напряжением, вырабатываемым потенциометром. Подбор компенсирующего напряжения выполняется вручную или автоматически. Компенсационная схема с ручным уравновешиванием, представлена на рисунке 35, а. Измеряемая ЭДС Ех или напряжение Uх уравновешиваются напряжением Uк ,снимаемым с резистора Rк , представляющего собой часть резистора R. Все сопротивление резистора R включено в цепь источника питания с ЭДС Е. Схема состоит из двух прямоугольников В нижней части находится датчик, имеющий сопротивление Rд. Резисторы в схеме называют ветвями или плечами моста. В состав схемы включен прибор, называемый нуль — индикатором (НИ), который служит для определения нулевого значения тока после компенсации. Для поддержания стабильного тока питания I можно использовать регулировочный резистор Rрег и миллиамперметр или применить источник стабилизированного напряжения как в автоматическом потенциометре (Рисунок 35, б) 
Ток через прибор: Iпр =(Uх—Uк )/(Rд +Rк+Rпр ), [2.8] где Rд— сопротивление датчика, Rк – сопротивление резистора, Rпр— сопротивление прибора, Uк – компенсирующее напряжение, Uх – измеряемое напряжение. Чувствительность компенсационной схемы можно определить как отношение приращение тока через прибор к вызывающему его изменению измеряемого напряжения: Sсх =∆Inp /∆Uх [2.9] ∆Inp=∆Uх/(Rаб+Rпр+Rд), [2.10] Rаб – внутреннее сопротивление электрической цепи питания,  [2.11] Компенсационный метод измерения применяется в цепях как постоянного, так и переменного тока. Дифференциальная схема — это гибрид мостовой и компенсационной схем. Состоит из двух смежных контуров с источником питания, а измерительный прибор включен в общую ветвь контуров и реагирует на разность контурных токов. В дифференциальной схеме могут быть использованы параметрические (с изменяющимся сопротивлением) и генераторные (с изменяющейся ЭДС) датчики. Дифференциальная схема включения параметрических датчиков показаны на рисунке 36, а (датчик включен в один контур). Дифференциальная схема включения генераторного датчика показана на рисунке 36, б. В этой схеме датчиком является так называемый дифференциальный трансформатор. Для расчета токов в дифференциальной схеме используют метод наложения: сначала определяют токи от одной ЭДС, а затем от другой. Изменение тока через прибор будет рассчитываться: Люди также интересуются этой лекцией: Заболевания желчного пузыря и билиарной системы.
[2.11] Компенсационный метод измерения применяется в цепях как постоянного, так и переменного тока. Дифференциальная схема — это гибрид мостовой и компенсационной схем. Состоит из двух смежных контуров с источником питания, а измерительный прибор включен в общую ветвь контуров и реагирует на разность контурных токов. В дифференциальной схеме могут быть использованы параметрические (с изменяющимся сопротивлением) и генераторные (с изменяющейся ЭДС) датчики. Дифференциальная схема включения параметрических датчиков показаны на рисунке 36, а (датчик включен в один контур). Дифференциальная схема включения генераторного датчика показана на рисунке 36, б. В этой схеме датчиком является так называемый дифференциальный трансформатор. Для расчета токов в дифференциальной схеме используют метод наложения: сначала определяют токи от одной ЭДС, а затем от другой. Изменение тока через прибор будет рассчитываться: Люди также интересуются этой лекцией: Заболевания желчного пузыря и билиарной системы.  , [2.12] где Iпр / — ток через прибор при включении параметрических датчиков в один контур
, [2.12] где Iпр / — ток через прибор при включении параметрических датчиков в один контур  I // — ток через прибор при включении параметрических датчиков в оба контура
I // — ток через прибор при включении параметрических датчиков в оба контура
 |
 |
Чувствительность дифференциальной схемы определяется аналогично предыдущим схемам эмпирически, путем подстановки опытных данных Ток в измерительной цепи мостовых и дифференциальных схем зависит от напряжения питания. Колебания напряжения питания приводят к появлению погрешности, так как ток через прибор и отклонение его стрелки изменяются даже при неизменном сопротивлении датчика.
Датчики, элементы измерения и контроля

Применение различных датчиков для контроля работы механизмов находит все более широкое применение. Предпосылки развития данных устройств является лучший контроль обеспечит лучшее качество продукции.
В современном оборудовании контролируется широкий ряд параметров: температура в различных составяющих оборудования, зазоры механических передач, усилия и упругие моменты в механизмах, износ оборудования и многое многое другое.
В качестве контрольно — измерительных средств применяются датчики, непосредственно воспринимающие изменения контролируемого параметра и преобразующие эти изменения в механические или электрические сигналы.
Датчики обычно представляют собой единое изделие (датчик и преобразователь), имеющее на выходе электрические унифицированные сигналы — релейные, непрерывные токовые, непрерывные напряжения постоянного или переменного токов, непрерывные частотные и т.п.
Датчики различаются по точности, линейности, разрешающей способности, частотной характеристике, характеристике шума, входному и выходному импедансу и многим другим параметрам.
По структуре построения и в зависимости от способа соединения элементов датчики могут быть с последовательным преобразованием, дифференциальные и компенсационные.
Также они различаются по типу параметра, который регистрируют или контролируют.
Датчики электромагнитных переменных
Датчики тока и напряжения
Сигналы, пропорциональные току, снимаются с шунтов, трансформаторов тока. Преобразованные сигналы датчиков используются также для измерения ЭДС, мощности, потока и т. д.
В этом качестве широко используются преобразователи, основанные на эффекте Холла, которые строятся в виде магнитопроводов с зазором. Магнитопровод из мягкого материала намагничивается при помощи обмотки по которой течет измеряемый ток. В зазоре устанавливается датчик Холла, питаемый от стабилизированного источника тока.
В качестве датчиков тока в релейно-контакторых разомкнутых схемах используются главным образом реле тока. Катушки, изготовленные из толстого провода с малым числом витков, непосредственно включаются в сеть контролируемого тока двигателя.
При достижении этим током уровней срабатывания или отпускания происходит коммутация контатков реле тока, которые производят соответствующие переключения в схемах управления двигателем.
В качестве датчиков тока этого типа применяют реле минимального и максимального токов.
Для измерения переменных токов в качестве датчиков тока применяются трансформаторы тока, что позволяет также осуществить потенциальное разделение силовых цепей и цепей управления.
Для измерения напряжения переменного тока используются трансформаторы напряжения.
Датчики потока и магнитной индукции
Для контроля указанных параметров применяют также датчики Холла. Эти датчики позволяют измерять постоянные и переменные магнитные поля
Датчики механических переменных
Датчики параметров движения
Предназначены для получения информации о линейных и угловых перемещениях, скоростях, ускорениях, силе и
моментах.
Основные требования, применяемые к датчикам перемещений: высокая точность измерения и контроля перемещений, быстродействие, помехоустойчивость, малые нелинейные
По физическому принципу действия датчики можно разделить:
- фотоэлектрические (оптоэлектронные) — использующие эффект периодического изменения освещенности (датчики снабжаются каналом нулевого импульса — началом отсчета, что позволяет при наличии счетчика использовать его как датчик положений).
Они обладают наибольшей точностью среди существующих преобразователей, наивысшей разрешающей способностью, отличаются высокой чувствительностью и быстродействием, простотой и надежностью конструкции, компактностью и т.п.
К недостаткам фотоэлектрических датчиков следует отнести чувствительность к посторонним источникам излучения, недостаточную стабильность и надежность.
- электростатические — емкостные (основанные на эффекте периодического измерения емкости) и пьезоэлектрические (основанные на эффекте возникновения электрического заряда на поверхности некоторых материалов в момент
- электромагнитные (основанные, например, на эффекте изменения индуктивности или взаимоиндуктивности)
Электромагнитные индуктивные датчики уступают емкостным по чувствительности и линейности характеристики, но
превосходят их в условиях производства по выходной мощности и надежности.
- электроаккуастические (основанные, например, на эффекте изменения энергии поверхностной аккустической волны);
- реостатные (использующие эффект линейного изменения сопротивления);
- лазерные (интерферометрические)
Тахогенераторы постоянного тока серии и переменного тока применяются в регулируемых электроприводах средней и большой мощности при невысокой точности регулирования скорости. Они обладают низкими оборотными и полюсными пульсациями и высокой линейностью и стабильностью характеристик.
Датчики скорости
Электромеханическое реле контроля скорости — работает по принципу асинхронного двигателя. Реле контроля скорости удобно использовать при автоматизации процесса торможения, когда требуется обеспечивать отключение двигателя от сети после снижения его скорости до нуля.
Датчики скорости (тахогенераторы) предназначены для изменения скорости вращения вала двигателя или исполнительного органа рабочей машины.
По своему устройству бывают:
-тахогенераторы постоянного тока — с возбуждением от независимого источника или постоянного магнита
— тахогенераторы переменного тока — имеют две обмотки, обмотка возбуждения подключается к питающей сети и служит для создания магнитного потока тахогенератора, другая — измерительная обмотка — напряжение на выводах этой обмотки пропорционально скорости вращения тахогенератора.
— синхронные тахогенераторы — однофазный синхронный генератор малой мощности. Он имеет ротор в виде многополюсного постоянного магнита. При его вращении созданное им магнитное поле пересекает витки обмотки статора, создавай в ней ЭДС, пропорциональную скорости вращения. Тем самым выходное напряжение на выводах обнотки статора оказывается пропорциональным скорости ротора.
— импульсный индуктивный датчик
в конструкции используется усилитель, который усиливыет поступающее сигналы ЭДС и использует последовательность выходных прямоугольных импульсов, частота которых пропорциональна измеряемой скорости. Затем эти импульсы преобразуются в двоичное число путем их подсчета за определенный интервал времени с запоминанием полученного числа на время последующего интервала.
При необходимости этот переменный по частоте сигнал может быть преобразован в напряжение постоянного тока. для
использования в аналоговых схемах
Датчики положения
— путевые и конечные выключатели релейного действия (контактные и бесконтактные) применяются при получении сигналов при достижении рабоичм органом привода определенных положений, которые затем поступают в цепи управления защиты и синхронизации.
— вращающиеся поворотные трансформаторы
Вращающиеся путевые и конечные выключатели имеют привод от валика, соединяемого с валом двигателя непосредственно или через редутор.
На валике расположены кулачковые шайбы, воздействующие на контакторную систему выключателя. При вращении вала двигателя в определенном его положении кулачковые шайбы переключают контакты выключателя.
— рычажные конечные и путевые выключатели имеют привод своей контактной системы от поворотного рычага, на который оказывает воздействие движущая часть электропривода или исполнительного органа. Возврат рычага и контактов в исходное положение осуществляется под действием пружины.
— нажимные выключатели — переключение контактов происходит при нажатии на шток выключателя, возврат которого в исходное положение осуществляется под действием пружины. В качестве нажимных выключателей применение находят также микропереключатели, у которых при воздействии на шток переключается упругий контакт.
В замкнутых системах электропривода применяются аналоговые и цифровые датчики положения.
— вращающиеся (поворотные) трансформаторы являются аналоговыми датчиками положения (угла поворота) вала двигателя или рабочей машины и представляют собой индукционныю электрическую машину малой мощности.
— сельсины широко применяется в замкнутых схемах электропривода в качестве аналогового датчика положения. Он представляет собой электрическую машину малой мощности, которая обеспечивает преобразование угла поворота вала в электрический сигнал.
— магнесин — бесконтактный электромеханический датчик поворота, имеет более простое по сравнению с сельсином и вращающимся трансформатором устройство, меньшие массу и габариты и характеризуется более высокой точностью измерения.
— индуктосин — используется для измерения линейных перемещений механических элементов привода или исполнительных органов рабочих машин. По своему устройству напоминает линейный асинхронный двигатель и имеет плоский статор и подвижный ротор. Первичная обмотка, расположенная на статоре, подключается к однофазной сети переменного тока, при этом на вторичной обмотке при перемещении ротора будет появляться ЭДС, зависящая от его положения.
Точность индуктосинов может достигать нескольких микрон.
— цифровой фотоэлектрический датчик состоит из первичного элемента, представляющего собой кодирующий диск, соединяемый с валом двигателя или рабочей машины. Он имеет несколько концентрических колец, каждое из которых состоит из сегментообразных прозрачных и непрозрачных участков. Колька с наименьшим радиусов, расположенные ближе к оси, имеет два участка — прозрачный и непрозрачный — и относится к старшему разряду выходного числа. В каждом следующем от центра кольце число участков удваивается, что соответствует в двоичном представлении чисел
переходу к следующему разряду.
Диск на рисунке имеет три таких кольца:
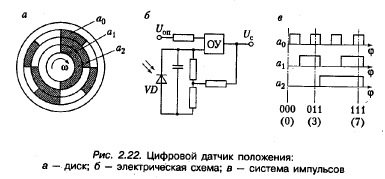
Получение электрического сигнала производится фотоэлектрическим способом. Для этого по одну сторону диска устанавливаются по числу колец источники света — светодиоды, а по другу сторону приемники света — фотодиоды.
Когда между ними находится прозрачный участок диска, светодиод освещает фотодиод, электрическое сопротивление последнего резко изменяется, что и является входным воздейсвием для схемы датчика положения.
Любому положению кодового диска в пределах 360 градусов. (одного оборота) соответствует однозначное сочетание нулей и единиц на выходах усилителей, т.е. опеределенное числовое выражение угла.
Для повышения точности цифровых датчиков положения применяются несколько кодовых дисков, соединяемых с валом двигателя через редуктор.
Кроме фотоэлектрических первичных элементов в датчиках положения используются индуктивные датчики с индуктосинами, позволяющие получать более высокие по точности характеристики.
Датчики угла

Под термином «датчики угла» понимаются устройства, преобразующие угловую координату в электрическое напряжение. Это напряжение используется в системах автоматического электропривода как сигнал обратной связи по углу или как управляющий сигнал в задающих устройствах.
Датчик угла поворота — устройство, предназначенное для преобразования угла поворота вращающегося объекта (вала) в
электрические сигналы, позволяющие определить угол его поворота. Они имеют множество применений и широко применяются в промышленности, в роботостроении, в машиностроении.
Они подразделяются:
- по способу выдачи информации на накапливающие (инкрементные) и абсолютные (позиционные);
- по принципу действия на оптические, резистивные, магнитные, индуктивные, механические;
- по допустимому углу поворота вала — с ограниченным и неограниченным диапазоном работы.
Датчик угла поворота также называется энкодером.
Датчики угла находят применение в следящих системах для измерения угла поворота исполнительного вала. Задание на движение системы может выполняться также с помощью датчика угла, координатой которого является угол поворота задающей оси.
Разность сигналов этих двух датчиков, так называемое «рассогласование», подается как управляющий сигнал на вход системы. В этом случае оба датчика могут рассматриваться объединенно как «датчик рассогласования». Задание на угловое перемещение может формироваться и без датчика угла с командной осью.
Для датчиков угла и рассогласования широкое применение нашли сельсины и вращающиеся трансформаторы.
Сельсин небольшая электрическая машина переменного тока, имеющая две обмотки: однофазную — обмотку возбуждения и трехфазную обмотку синхронизации.
По конструктивному признаку сельсины разделяются на два основных типа: контактные и бесконтактные.
У первого — обмотка возбуждения расположена на роторе, обмотка синхронизации — на статоре.
У второго — обмотка ротора получает питание от вращабщейся совместно с ротором вторичной обмотки
кольцевого трансформатора возбуждения с неподвижной первичной обмоткой.
Датчики линейного перемещения — работают по магнитострикционному принципу (магнитострикция — изменение состояния намагниченности тела.)
Датчики усилия
В этих датчиках применяют магнитострикционные и пьезоэлектрические преобразователи.
Магнитострикция (от лат. strictio — сжатие, натягивание) — явление, заключающееся в том, что при изменении состояния намагниченности тела его объём и линейные размеры изменяются.
Работа пьезоэлектрических преобразователей основана на явлении пьезоэлектричества, состоящего в возникновении (или в изменении) электрической поляризации в некоторых анизотропных диэлектриках.
Датчики деформации — в их качестве применяют тензорезисторные преобразователи. Тензорезисторные преобразователь представляет собой проовдник, изменяющий свое сопротивление придеформации растяжения или сжатия. Эти датчики приклеивают к объекту и они деформируются вместе с ним, они обладают малым размером и выдают весьма точные измерения.
Могут измерять также некоторые физические величины — давление, ускорение, момент сил.
Акселерометры — приборы, представляющие собой измерители ускорения, широко применяются в промышленности при оценке чувствительности изделий к ударам и вибрациям
Датчики технологических переменных
Датчики температуры
Выбор такого датчика определяется диапазоном изменения измеряемой температуры и условиями эксплуатации. Для измерения температуры используют термопары, термосопротивления, полупроводниковые датчики и пирометры.
Термопары — (термоэлектрический преобразователь) — используются для измерения температуры, представляет собой пару проводников из различных материалов, соединенных на одном конце и формирующих часть устройства, использующего термоэлектрический эффект.
Термометры сопротивления — они используют эффект изменения электрического сопротивления проводников при изменении температуры. В промышленности применяют платиновые термометры.
Термисторы — тип термометров сопротивления — получают спеканием смесей металлических сплавов, при этом образуется керамика с большим отрицательным температурным коэффициентом.
Температурный диапазон металло-пленочных сопротивлений по сравнению с термисторами шире, но линейность выше, однако термисторы имеют примернов 10 раз большую чувсвительность.
В случаях, когда возможно только визуальное наблюдение исследуемого процесса для измерения температуры применяют оптические пирометры. В этом случае диапазон измеряемых температур ограничивается диапазоном спектральной чувсвительности датчика.
Одним из современных методов измерения температуры является метод, основанный на использовании транзистора со смещением базового перехода в прямом направлении. В диапазоне рабочих температур +- 100 С погрешность измерения составляет всего 0,1 С.
Датчики давления и расходомеры
Раньше для измерения давления и расхода жидкости или газа использовались потенциометрические приборы. Низкая стоимость и высокий уровень выходного напряжения обеспечили высокий уровень выходного напряжения обеспечили широкое применение этих приборов в простых схемах. Однако у них есть недостатки — высокая чувсвительность к ударам и вибрациям, а также значительные погрешности, обусловленные механической конструкцией, приводящие к нелинейности передаточных характеристик, что ограничивает применение приборов такого типа.
Для устранения недостатков, свойственных потенциометрическим датчикам давления. были разработаны бесконтактные тензометры — приборы, обеспечивающие существенное увеличение погрешности и стабильности и имеющие типовую погрешность 0,5% полой измерительной шкалы.
Их уровень выходного напряжения находится в милливольтном диапазоне, поэтому после прибора обычноставят предусилитель. В отличие от других бесконтактных датчиков полупроводниковые тензометры располагают
непосредственно на диафрагме, воспринимающей давление, что устраняет механические соединительные детали. Их частотный диапазон и чувствительность к вибрациям такие же как у бесконтактных.
Расход жидкости измеряют датчиками перепада давления или механическими компактными датчиками (например, турбинами).
Дифференциальные маномерты — дифманометры-различных систем используют для измерения технологических параметров расхода жидкости, газа или пара, перепада давления, избыточного давления, разреженя (тяги), уровня жидкости в открытых резервуарах или резервуарах под давлением.
К расходомерам с механическим контактом относятся: турбинные и гироскопические преобразователи, которые измеряют скорость потока по угловому моменту; охлаждаемые термоэлектрические преобразователи скорости; датчики, измеряющие скорость по электрическому сопротивлению, а также датчики, измеряющие скорость потока с использованием бета-излучения.
Датчики уровня.
Для измерения уровня жидкости и отслеживания его изменения широко применяются поплавковые датчики, дифференциальные датчики давления, ультразвуковые и радиактивные.
Поплавковые датчики отличаются простотой и разнообразием методов преобразования выявленных изменений уровня в показания отчетного устройства. Но для вязких жидностей эти датчики не подходят.
Если известна плотность жидкости ее уровень можно измерить дифференциальным датчиком давления — дифманометром, который должен фиксировать разность гидростатического давления между уровнем поверхности и плоскостью дна. Высота столба жидности в этом случае высота столба жидкости определяется соотношением разницы гидростатического давления к плотности.
По принципу действия измерительной системы дифманометры делятся на: поплавковые, кольцевые, колокольные, мембранные и сильфонные.
Ультразвуковые датчики могут входить в состав локационных установок, которые особенно удобны при измерении уровня жидностей в высоких цистернах, а также в состав устройств, измеряющих дискретные значения уровней.
Уровень тяжелых смесей, таких как цемент и бумажная масса, лучше всего измерять радиоактивными датчиками, устанавливаемыми аналогично ультрозвуковым устройствам дискретного измерения уровня.
Также к ним относятся датчики толщины, полосового материала (металла, бумаги, пластика) влажности материала, массы и других переменных.
Датчики времени
При посторении релейно-контакторных схем управления, использующих принцип времени. в качестве датчиков используются различные реле времени — электромагнитные, моторные, электронные, анкерные, механические.
В полупроводниковых схемах управления применяются устройства точного отчета временных интервалов.
— электромагнитное реле ( с электромагнитным замедлением) применяются при постоянном токе.
Помимо постоянной обмотки эти реле имеют дополнительную короткозамкнутую обмотку, состоящую из медной гильзы. При нарастании основного магнитного потока он создает ток в дополнительной обмотке, который препятствует нарастанию основного потока.
В итоге результирующий магнитный поток увеличивается медленнее, время трогания якоря уменьшается, чем обеспечивается выдержка времени при включении.
Этот вид реле времени обеспечивает выдержку времени при срабатывании от 0,07 с до 0,11 с, при отключении от 0,5 с до 1,4 с.
— моторное (электромеханическое реле времени) —
в своей основе имеет специальный низкоскоростной двигатель и редуктор с большим передаточным числом, на выходном валу которого устанавливается рычаг, начальное положение которого определяется по шкале установок времен реле.
Начало отсчета времени соответствует подаче напряжения на двигатель, который включившись, начинает вращаться и медленно поворачивать рычаг на валу редуктора. Через заданное время, определяемое начальным положением рычага, он доходит до вспомогательных контактов и замыкает их. Это приводит к включению выходного реле, которое одним из своих контактов отключает двигатель. На этом отсчет выдержки времени завершается. Такие реле обеспечивают выдержку времени до нескольких минут.
— электронные реле времени обычно в своих схемах используют различные полупроводниковые элементы (чаще всего транзисторные) и конденсаторы, время разряда или заряда а также различные аналоговые и цифровые схемотехнические решения. Как правило это интегральные цепи или цифровые логические устройства (таймеры). Встречаются также реле времени на основе элементов микропроцессорной техники.
— пневматические реле времени
обеспечивают выдержку времени за счет работы воздушного (пневматического) замедлителя (демпфера), управляемого с помощью электромагнита.
При подаче на электромагнит напряжения питания (начало отсчета времени) начинается процесс перекачки воздуха из одной камеры реле в другую через дроссельное отверстие. Величина этого отверстия, а тем самым скорость перекачки и выдержка времени реле, регулируется с помощью иглы, положение которой устанавливается посредством регулировочной гайки. В конце процесса перекачки воздуха через отверстие происходит переключение установленного реле микропереключателя, что определяет конец отчета выдержки времени.
— механические реле времени имеет замедлитель в виде анкерного механизма, управляемого электромагнитом.
Реле времени с анкерным или часовым механизмом работает за счёт пружины, которая заводится под действием электромагнита, и контакты реле срабатывают только после того, как анкерный механизм отсчитает время, выставленное на шкале. Разновидность подобных реле используется в мощных (на токи в сотни и тысячи ампер) автоматических выключателях на напряжение 0,4-10 кВ. Составные части такого реле — механизм замедления и токовая обмотка, взводящая его пружину. Скорость хода механизма зависит от затяжки пружины, то есть от тока в обмотке, по окончании хода механизм вызывает отключение автомата, тем самым выполняя функции тепловой защиты от перегрузок, не нуждаясь при этом в коррекции по температуре окружающего воздуха.
Просмотров: 22974 | Дата публикации: Понедельник, 20 июня 2016 07:47 |