Рабочие характеристики асинхронного двигателя
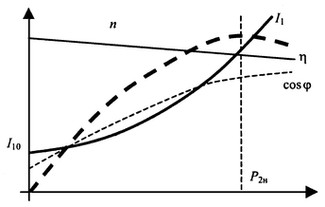
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s).
Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1.
По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
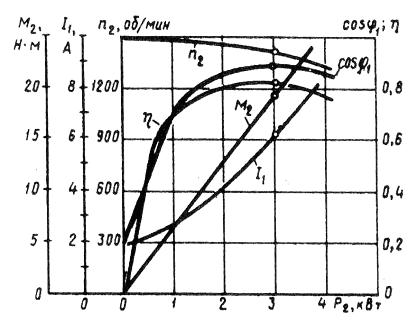
Рис. 1. Рабочие характеристики асинхронного двигателя двигателя
Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2,
где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.
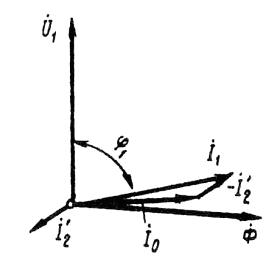
Рис. 2. Векторная диаграмма асинхронного двигателя при небольшой нагрузке
Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 2).
Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе.
В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
На рис. 3 представлены графики зависимости cos φ1, асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).
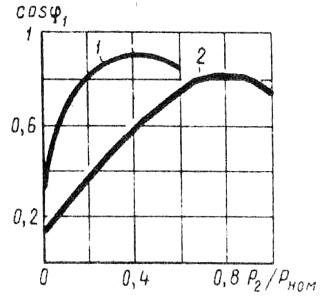
Рис. 3. Зависимость cos φ1,от нагрузки при соединении обмотки статора двигателя звездой (1) и треугольником (2)

Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Основные характеристики асинхронных электродвигателей
Наибольшее распространение имеет трехфазный асинхронный электродвигатель. Электродвигатели постоянного тока и синхронные применяются редко.
Большинство электрифицированных машин нуждаются в приводе мощностью от 0,1 до 10 кВт, значительно меньшая часть — в приводе мощностью в несколько десятков кВт. Как правило, для привода рабочих машин используются короткозамкнутые трехфазные электродвигатели. По сравнению с фазным такой электродвигатель имеет более простую конструкцию, меньшую стоимость, большую надежность в эксплуатации и простоту в обслуживании, несколько более высокие эксплутационные показатели (коэффициент мощности и коэффициент полезного действия), а при автоматическом управлении требует простой аппаратуры. Недостаток короткозамкнутых электродвигателей — относительно большой пусковой ток. При соизмеримости мощностей трансформаторной подстанции и электродвигателя его пуск сопровождается заметным снижением напряжения сети, что усложняет как пуск самого двигателя, так и работу соседних токоприемников.
Наряду с трехфазными асинхронными короткозамкнутыми электродвигателями основного исполнения применяются также отдельные модификации этих двигателей: с повышенным скольжением, многоскоростные, с фазным ротором, с массивным ротором и т. д. Электродвигатели с фазным ротором применяют и в тех случаях, когда мощность питающей сети недостаточна для пуска двигателя с короткозамкнутым ротором.
Механические характеристики асинхронных электродвигателей с короткозамкнутым ротором в значительной мере зависят от формы и размеров пазов ротора, а также от способа выполнения роторной обмотки. По этим признакам
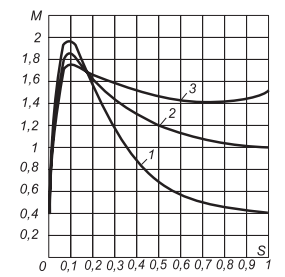
Рис. 1. Кривые моментов M = f(S) асинхронных электродвигателей
различают электродвигатели с нормальным ротором (нормальная беличья клетка), с глубоким пазом и с двумя клетками на роторе. Конструкция ротора короткозамкнутых асинхронных электродвигателей общего назначения мощностью свыше 500 Вт предопределяет явление вытеснения тока в обмотке, эквивалентно увеличению ее активного сопротивления. Поэтому, а также вследствие насыщения магнитных путей потоков рассеивания такие электродвигатели (в первую очередь обмотки ротора) обладают переменными параметрами и аналитические выражения их механических характеристик усложняются. Увеличение активного сопротивления ротора в период пуска вызывает увеличение начального пускового момента при некотором снижении силы начального пускового тока (рис. 1).
2. Основные характеристики электродвигателей
Номинальный режим электродвигателя соответствует данным, указанным на его щитке (паспорте). В этом режиме двигатель должен удовлетворять требованиям, установленным ГОСТом.
Существует восемь различных режимов работы, из них основными можно считать:
· продолжительный номинальный режим;
· кратковременный номинальный режим с длительностью рабочего периода 10, 30 и 90 мин;
· повторно-кратковременный номинальный режим с продолжительностью включения (ПВ) 15, 25, 40, 60%, с продолжительностью одного цикла не более 10 мин.
Номинальной мощностью Рн электродвигателя называется указанная на щитке полезная механическая мощность на валу при номинальном режиме работы. Номинальная мощность выражается в Вт или кВт.
Номинальная частота вращения nн вала электродвигателя называется указанное на щитке число оборотов в минуту, соответствующее номинальному режиму.
Номинальный момент вращения — момент, развиваемый двигателем на валу при номинальной мощности и номинальной частоте вращения:
Мн — номинальный момент вращения, Н·м (1 кгс·м = 9,81 Н·м ≈ 10 Н·м);
Рн — номинальная мощность, кВт;
nн — номинальная частота вращения, об/мин.
Номинальный к.п.д. hн электродвигателя — отношение его номинальной
мощности к мощности, потребляемой им из сети при номинальном напряжении:
Рн — номинальная мощность, кВт;
Uн — номинальное (линейное) напряжение, В;
Iн — номинальная сила тока, А;
cosφн — номинальный коэффициент мощности.
Номинальной силой тока электродвигателя называется сила тока, соответствующая номинальному режиму. Действительное значение силы тока при номинальном режиме может отличаться от указанного на щитке электродвигателя в пределах установленных допусков для к.п.д. и коэффициента мощности.
Максимальный вращающий момент электродвигателя — наибольший вращающий момент, развиваемый при рабочем соединении обмоток и постепенном повышении момента сопротивления на валу сверх номинального при условии, что напряжение на зажимах двигателя и частота переменного тока остаются неизменными и равными номинальным значениям.
Начальный пусковой вращающий момент электродвигателя — момент вращения его при неподвижном роторе, номинальных значениях напряжения и частоты переменного тока и рабочем соединении обмоток.
Минимальным вращающим моментом электродвигателя в процессе пуска называется наименьший вращающий момент, развиваемый двигателем при рабочем соединении обмоток и частоте вращения в пределах от нуля до значения, соответствующего максимальному вращающему моменту (напряжение на зажимах двигателя и частота переменного тока должны оставаться неизменными и равными их номинальным значениям).
Номинальная частота вращения вала электродвигателя является следующим за мощностью параметром, от которого в значительной мере зависят конструктивное оформление, габариты, стоимость и экономичность работы электропривода. Наиболее приемлемыми в диапазоне мощностей от 0,6 до 100 кВт являются частоты вращения 3000, 1500 и 1000 об/мин (синхронные). Электродвигатели с частотой вращения 750 об/мин (восьмиполюсные) малых мощностей имеют низкие энергетические показатели. При одинаковой мощности электродвигатели с более высокой частотой вращения имеют более высокие значения к.п.д. и cosφ, а также меньшие размеры и массу, что определяет их меньшую стоимость.
Сила тока холостого хода I0 в значительной мере определяется силой намагничивающего тока I0Р. приближенно можно считать I0 = I0P . Для машин
основного исполнения относительное значение силы тока холостого хода
I0 = (0,2—0,6)Iн (оно тем больше, чем меньше номинальная частота вращения и мощность электродвигателя). Зависимость тока холостого хода от частоты вращения электродвигателя приведена в таблице 2.1.
Таблица 2.1. Токи холостого хода для двигателей основного исполнения
Среднее значение токов холостого хода
(в долях от силы номинального тока) при синхронной частоте вращения, об/мин
§79. Характеристики асинхронных двигателей

Для правильной эксплуатации асинхронного двигателя необходимо знать его характеристики: механическую и рабочие.
Механическая характеристика.
Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора.
Как показывает кривая на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некотором скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.

Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В).
Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками.
При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками.
Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.

Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
Рабочие характеристики.
Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1 коэффициента полезного действия η и cosφ1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264).

Рис. 264. Рабочие характеристики асинхронного двигателя
Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cosφ1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9.
Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз.
Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы).
Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75Uном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении.
Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз.
При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении.
Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты.
Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
Асинхронный двигатель
Если поместить во вращающееся магнитное поле короткозамкнутую медную или алюминиевую рамку на валу электродвигателя, то она вместе с валом придет во вращение по направлению вращения поля. Явление это объясняется следующим образом. Пусть угловая скорость вращения рамки n несколько меньше угловой скорости вращения поля no (асинхронное вращение). В этом случае рамка «проскальзывает» относительно поля. Величину s = (no-n)/no называют скольжением. Относительно магнитного поля рамка вращается с угловой скоростью, пропорциональной скольжению. Поэтому в ней возникает индукционный ток, пропорциональный относительной скорости вращения рамки, т. е. скольжению. По закону Ленца, индуцированный ток взаимодействует с полем так, что рамка увлекается полем.
А так как магнитное поле вращается, то это приводит к вращению рамки. Вращающий момент, действующий на рамку, пропорционален индуцированному току и тем самым скольжению. Этот вращающий момент уравновешивается внешней нагрузкой. Таким образом, в установке данного типа рамка всегда вращается несколько медленнее вращения поля. Такое вращение называют асинхронным (т. е. неодновременным, несогласованным). Сам двигатель получил название асинхронного.
Дополнительно по теме
- Активные и индуктивные сопротивления обмоток
- Расчет магнитной цепи
- Основные уравнения, схемы замещения и векторная диаграмма
- Основные энергетические соотношения и механическая характеристика
- Потери и КПД
- Круговая диаграмма, рабочие характеристики
- Определение главных размеров двигателей
Асинхронный двигатель наиболее распространен в качестве электропривода различных механизмов благодаря своей простоте и надежности. . Их применяют для привода машин и механизмов, не требующих строго постоянной частоты вращения и ее регулировки. Важнейшими достоинствами данного двигателя являются простота его устройства и большая надежность, вызванная отсутствием скользящих контактов. Двигатель имеет достаточный пусковой момент, легко реверсируется (т. е. в нем легко меняется направление вращения ротора). В результате этого асинхронные двигатели являются самыми распространенными в технике электрическими машинами. Более 60 % всей вырабатываемой в мире энергии преобразуется в механическую, в основном, с помощью асинхронных двигателей. Мощность двигателей колеблется от десятков ватт до сотен киловатт.
Асинхронный двигатель изготавливается в однофазном, двухфазном и трехфазном исполнении.
Рассмотрим вращающееся поле переменного тока трехфазной цепи короткозамкнутого асинхронного двигателя с тремя обмотками, сдвинутыми по окружности на 120° и соединенными звездой .
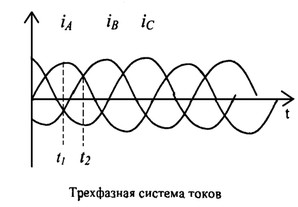
Обмотки статора питаются симметричным трехфазным напряжением. Начальную фазу тока в обмотке А-х принимаем равной нулю. Тогда:
Асинхронный двигатель состоит из статора и ротора. Статор представляет собой литой корпус (стальной или чугунный) цилиндрической формы. Внутри статора располагается магнитопровод с вырубленными пазами, в которые укладывается статорная обмотка. Концы обмоток выводятся в клеммную коробку и могут быть соединены как треугольником, так и звездой. Корпус статора с торцов закрыт подшипниковыми щитами, в которые запрессовываются подшипники вала ротора. Ротор состоит из стального вала с напрессованным на него магнитопроводом.
По конструкции роторов двигатели делятся на две группы. Первая — с короткозамкнутым ротором и вторая — с фазным. У двигателя с короткозамкнутым ротором в пазы заливаются алюминиевые стержни и накоротко замыкаются по торцам. У фазового ротора имеются три обмотки, соединенные в звезду. Выводы обмоток присоединены к кольцам, закрепленным на валу. К кольцам при пуске прижимаются неподвижные щетки, к которым подключаются сопротивления. В начальный момент пуска ротор находится в заторможенном состоянии, затем сопротивление уменьшается и двигатель плавно запускается, что позволяет снизить пусковой ток.
К обмоткам статора подводится трехфазное напряжение, а ротор вращается посредством вращающегося магнитного поля, создаваемого системой трехфазного тока.
В момент времени t1: . Если ток фазы А положителен, т.е. течет от начала к концу, то, пользуясь правилом правоходового винта, можно найти картину распределения магнитного поля для времени t1.
В момент времени t2 вектор результирующей магнитной индукции Вm развернется на угол a1 и далее по часовой стрелке с периодом обращения 360°. Для данного примера угол a1 = 60°.
Таким образом, магнитная индукция представляет собой вращающееся поле с амплитудой


За период поле делает один оборот, , (где f = 50 Гц), и является промышленной частотой питающего переменного напряжения и тока.
При синусоидальном характере вращающегося поля его скорость no равна отношению af/p (где р — число пар полюсов). В рассматриваемом примере р = 1 и частота вращения равна соответственно 3000 оборотам в минуту. Если число катушек в каждой фазе увеличить в два раза, а сдвиг фаз между токами сохранить 120°, то частота вращения уменьшится в два раза за счет увеличения числа пар полюсов. Особенностью короткозамкнутого асинхронного двигателя является наличие постоянной частоты вращения поля статора, определяемой числом пар полюсов.
Если поменять местами любые две фазы, то возникнет поле обратной последовательности и ротор начнет вращаться в другую сторону. Еще одной особенностью асинхронных двигателей является разность частоты вращения полей статора no и ротора n, что делает возможным их электромагнитное взаимодействие. При этом поле ротора будет как бы скользить относительно поля статора

где s — скольжение, при номинальной мощности двигателя скольжение составляет 0,01-0,03.
Основное вращающееся магнитное поле индуцирует в обмотках статора и ротора ЭДС, аналогично трансформатору, так как при разомкнутом роторе асинхронный двигатель представляет собой трансформатор в режиме холостого хода:

где индекс 1 относится к параметрам статора, а 2 — к параметрам ротора; Кобм — обмоточные коэффициенты, определяемые способом укладки обмоток (петлевая или волновая). Кобм=0,92-0,98; Е2s=E2S; Е2 — действующее значение ЭДС неподвижного ротора при s = 1; f2=f1S.
В асинхронном двигателе кроме основного магнитного потока создаются потоки рассеяния. Один охватывает проводники статора, другой — ротора. Потоки рассеяния характеризуются соответствующими индуктивными сопротивлениями Х1 и Х2s.
Уравнения электрического состояния фаз обмоток статора и ротора:

Момент асинхронного двигателя
Вращающий электромагнитный момент двигателя в соответствии с законом электромагнитных сил

См — конструктивная постоянная;
j2s- фазовый сдвиг между током и магнитным потоком.
Отношение максимального момента Мmax к номинальному Мн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
Потери в асинхронном двигателе
Потери делятся на потери в статоре и в роторе. Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе — из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
где К = 2,9-3,6 определяется диаметром статора D1.
Потери в стали в рабочем режиме во много раз меньше электрических потерь в роторе и ими обычно пренебрегают.
КПД асинхронного двигателя составляет от 0,75 до 0,95.
Рабочий момент двигателя пропорционален квадрату напряжения, что необходимо учитывать при включении двигателя в протяженных распределительных сетях. Номинальному моменту соответствует номинальное скольжение, а пусковому — sп.
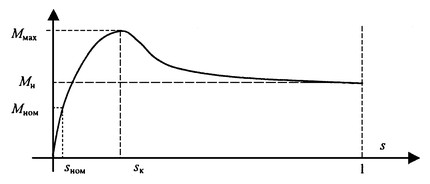
Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке.
На участке от 0 до Мmax двигатель работает в устойчивом режиме, а участок от Sk называется режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Мп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Механическая характеристика асинхронного двигателя
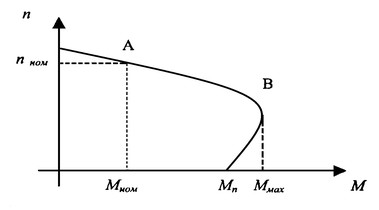
Зависимость скорости вращения от нагрузки на валу двигателя называется механической характеристикой асинхронного двигателя.
Участок АВ механической характеристики соответствует устойчивому режиму работы асинхронного двигателя. Увеличение нагрузки (тормозного момента) ведет к некоторому снижению частоты вращения ротора, что вызывает увеличение вращающего момента. При превышении тормозным моментом критического, двигатель останавливается. Точка В на графике соответствует точке критического или опрокидывающего момента.
Регулирование частоты вращения
Регулирование частоты вращения может быть осуществлено тремя способами: изменением частоты питающего напряжения, переключением числа пар полюсов и изменением скольжения.
Для регулирования частоты вращения двигателей с короткозамкнутым ротором в настоящее время широко используются частотные преобразователи с микропроцессорным управлением.
Тормозные режимы возникают в машине при определенных условиях или создаются искусственно с целью ускорения процесса остановки двигателя. Торможение может быть:
- генераторное с отдачей энергии в сеть;
- противовключением;
- динамическое.
Генераторным тормозным режимом называется режим работы двигателя, когда под действием внешнего момента ротор двигателя вращается в том же направлении, что и магнитное поле, но с большей скоростью.
Тормозной режим противовключения возникает в том случае, когда под действием внешнего момента, приложенного к валу двигателя, ротор вращается в противоположную сторону относительно вращающегося магнитного поля.
Динамический тормозной режим получается при отключении обмотки статора от сети трехфазного тока и подключении ее на время торможения к источнику энергии постоянного тока.
Расчетные формулы для выбора двигателя имеют вид:

Выбор двигателя по каталогу осуществляется следующим образом. По заданному моменту рабочего механизма и частоте вращения определяется необходимая мощность. После этого определяются условия окружающей среды, выбирается исполнение по типу монтажа и высоте оси рабочего вала двигателя. Зная эти параметры, по каталогу проверяют необходимую перегрузочную способность, КПД, массу и момент инерции.
Для шахтных условий используются двигатели взрывозащищенного исполнения; для крановых механизмов — двигатели с повышенным скольжением и т.д.
В бытовых приборах используются однофазные двигатели. Однофазный двигатель отличается от трехфазного тем, что его статорная обмотка подключается к однофазному источнику питания. Ротор выполняется короткозамкнутым. На статоре размещаются две обмотки, оси которых смещены друг относительно друга на 90 электрических градусов. Одна называется рабочей, а другая -пусковой.
Рабочие характеристики асинхронного двигателя
Рабочими характеристиками асинхронного двигателя являются зависимости от мощности на валу Р2 таких параметров, как момент, частота вращения, ток статора, КПД и cosj.Анализ характеристик показывает, что частота вращения ротора падает с увеличением нагрузки, а момент пропорционален ей. Ток статора изменяется по нелинейному закону, что связано с магнитной системой двигателя и при Р2=0 определяется током холостого хода, составляющего до 40% его номинального значения.
В системах управления используются двигатели, в которых одна из обмоток статора постоянно подключена к сети переменного тока (обмотка возбуждения), а ко второй (обмотка управления) подводится напряжение управления. Такие двигатели относятся к классу микромашин.
Микромашины используются в информационных системах, где они выполняют функции первичных преобразователей для вычислительных операций в системах автоматики и телемеханики.
Одним из примеров является сельсин, предназначенный для передачи на расстояние угловых перемещений валов, механически не связанных друг с другом. По конструкции сельсины делятся на контактные и бесконтактные. Контактные сельсины выполняются в двух вариантах. В одном обмотка возбуждения располагается на роторе, а трехфазная обмотка, называемая обмоткой синхронизации, в пазах статора. В другом варианте наоборот. При включении обмотки возбуждения сельсина на однофазное напряжение ток создает пульсирующее магнитное поле, которое индуцирует в каждой фазе обмотки синхронизации переменную ЭДС. Действующее значение ЭДС каждой фазы зависит от расположения осей этих фаз относительно оси потока возбуждения.
В простейшем случае схема дистанционной передачи угловых перемещений состоит из двух одинаковых сельсинов, у которых одноименные зажимы обмоток синхронизации соединены проводами линии связи, а на обмотки возбуждения подается напряжение сети. Один из сельсинов называют сельсин-датчиком, другой — сельсин-приемником.
Дополнительно по теме
- Активные и индуктивные сопротивления обмоток
- Расчет магнитной цепи
- Основные уравнения, схемы замещения и векторная диаграмма
- Основные энергетические соотношения и механическая характеристика
- Потери и КПД
- Круговая диаграмма, рабочие характеристики
- Определение главных размеров двигателей