13. Опишите и объясните принцип действия асинхронного двигателя. Может ли ротор асинхронного двигателя вращаться синхронно с вращающимся магнитным полем?
При включении обмотки статора в сеть трехфазного тока, возникает вращающееся магнитное поле, которое сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи. В результате взаимодействия этих токов с вращающимся магнитным полем на роторе, возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого, ротор АД приходит во вращение с частотой n2< n1 в сторону вращения поля статора. Если вал АД механически соединить с валом какого-либо исполнительного механизма, то вращающий момент двигателя приведет механизм во вращение. Следовательно, поступающая из сети в двигатель мощность Р1, преобразуется в механическую мощность Р2.
Весьма важным параметром АД является скольжение – величина, характеризующая разность частот вращения ротора и поля статора:
Вполне очевидно, что с увеличением нагрузочного момента на валу АД частота вращения ротора n2 уменьшается. Следовательно, скольжение АД зависит от механической нагрузки на валу двигателя и может изменяться в диапазоне 0 < S ≤ 1
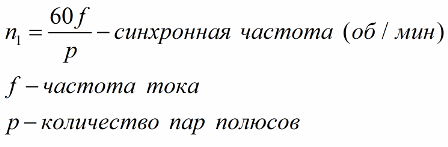
При включении АД в сеть в начальный момент времени ротор под влиянием сил инерции неподвижен ( n2 = 0 ) при этом S=1. В режиме работы двигателя без нагрузки на валу (режим Х.Х. ) ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n1 и скольжение весьма мало отличается от нуля S ~ 0 . Определение асинхронной частоты вращение производится по :
Ротор не может вращаться синхронно с полем статора, так как при синхронном вращении магнитное поле статора не будет пересекать проводники ротора, а это означает, что ток ротора, в таком случае, будет отсутствовать. Значит, частота вращения ротора, в любом случае, будет несколько меньше частоты вращения поля статора.
14. Перечислите и охарактеризуйте потери мощности асинхронных двигателей. Приведите энергетическую диаграмму асинхронного двигателя.
Преобразование электрической энергии в механическую в асинхронном двигателе связано с потерями энергии. Полезная мощность на выходе двигателя всегда меньше потребляемой из сети мощности на величину потерь.
Сумма всех потерь АД:
Энергетическая диаграмма АД:
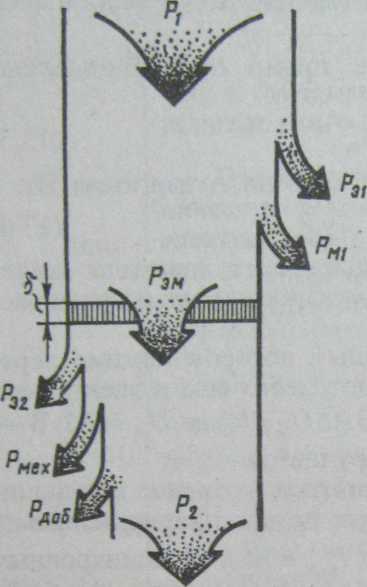
1 . Магнитные потери в асинхронном двигателе вызваны потерями на гистерезис и вихревые токи в сердечнике при его перемагничивании. Их величина пропорциональна частоте перемагничивания.
Частота перемагничивания сердечника статора равна частоте тока в сети а частота перемагничивания сердечника ротора обычно равна 2-4 Гц, поэтому магнитные потери в сердечнике ротора малы и их не учитывают.
2. Электрические потери – на нагрев обмоток статора и ротора.
Причём сопротивления обмоток зависят от температуры и необходимо их пересчитывать на рабочую температуру обмотки.
Потери в роторе зависят от скольжения:
В АД с фазным ротором есть ещё потери на сопротивлении щёточных контактов:
Электромагнитная мощность двигателя:
3. Механические потери – потери на трение в подшипниках машины и на вентиляцию. — пропорциональны частоте вращения ротора.
4. Добавочные потери – все трудноучитываемые потери типа действия высших гармоник ЭДС, пульсацией индукции в зубцах и др. Принимаются обычно полпроцента от подводимой мощности
для неноминального режима, где
Электрические и добавочные потери – переменные потери, они зависят от нагрузки двигателя. Магнитные и механические потери не зависят от нагрузки и постоянны.
Что такое синхронное вращение
Частота вращения ротора, при которой работает асинхронный электродвигатель, зависит от частоты питающего напряжения, от мощности текущей нагрузки на валу, и от числа электромагнитных полюсов данного двигателя. Эта реальная частота вращения (или рабочая частота) всегда меньше так называемой синхронной частоты, которая определяется лишь параметрами источника питания и количеством полюсов обмотки статора данного асинхронного двигателя.
Таким образом, синхронная частота вращения двигател я — это частота вращения магнитного поля обмотки статора при номинальной частоте питающего напряжения, и она несколько отличается от рабочей частоты. В итоге количество оборотов в минуту под нагрузкой всегда меньше так называемых синхронных оборотов.
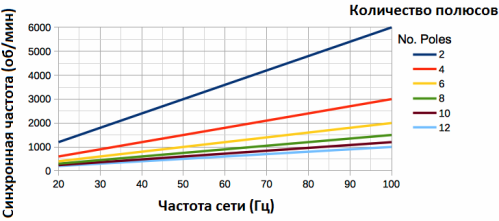
На приведенном рисунке видно, как синхронная частота вращения для асинхронного двигателя с тем или иным количеством полюсов статора зависит от частоты питающего напряжения: чем выше частота — тем выше угловая скорость вращения магнитного поля. Так например в частотно-регулируемых приводах меняя частоту питающего напряжения изменяют синхронную частоту двигателя. При этом изменяется и рабочая частота вращения ротора двигателя под нагрузкой.
Обычно обмотку статора асинхронного двигателя питают трехфазным переменным током, который и создает вращающееся магнитное поле. И чем больше пар полюсов — тем меньшей будет синхронная частота вращения — частота вращения магнитного поля статора.
Большинство современных асинхронных двигателей имеют от 1 до 3 пар магнитных полюсов, в редких случаях 4, ведь чем больше полюсов — тем ниже КПД асинхронного двигателя. Однако при меньшем количестве полюсов скорость вращения ротора можно менять очень-очень плавно, изменяя частоту питающего напряжения.
Как уже было отмечено выше, реальная рабочая частота асинхронного двигателя отличается от его синхронной частоты. Почему так происходит? Когда ротор вращается с частотой меньшей чем синхронная, то проводники ротора пересекают магнитное поле статора с некоторой скоростью и в них наводится ЭДС. Эта ЭДС создает токи в замкнутых проводниках ротора, в результате данные токи взаимодействуют с вращающимся магнитным полем статора, и возникает крутящий момент — ротор увлекается магнитным полем статора.

Если момент имеет достаточную величину чтобы преодолеть силы трения, то ротор начинает вращаться, при этом момент электромагнитный равен тормозящему моменту, который создают нагрузка, силы трения и т. д.
При этом ротор все время отстает от магнитного поля статора, не может рабочая частота достичь синхронной частоты, так как если бы это произошло, то в проводниках ротора перестала бы наводиться ЭДС, и вращающий момент просто не появится. В итоге, для двигательного режима вводят величину «скольжение» (скольжение s, как правило, составляет 2-8%), в связи с чем справедливо и следующее неравенство двигателя:
Но если ротор того же асинхронного двигателя раскрутить при помощи какого-нибудь внешнего привода, например двигателем внутреннего сгорания, до такой скорости, что частота вращения ротора превысит синхронную частоту, то ЭДС в проводниках ротора и активный ток в них приобретут определенное направление, и асинхронный двигатель превратится в генератор.
Общий электромагнитный момент окажется тормозящим, скольжение s станет отрицательным. Но чтобы генераторный режим смог проявить себя, необходимо поставить асинхронному двигателю реактивную мощность, которая бы создавала магнитное поле статора. В момент старта такой машины в генераторном режиме может хватить остаточной индукции ротора и конденсаторов, которые подключают к трем фазам обмотки статора, питающей активную нагрузку.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
почему ротор асинхронного двигателе не вращаться быстрее чем магнитное поле статора
Единственная причина отставания скорости ротора от скорости поля статора (скольжение) это активное сопротивление ротора. Изобретут проводники для ротора без сопротивления, его скорость догонит скорость поля статора. Кстати, изменение сопротивления в цепи ротора (АД с фазным ротором) используется для регулирования скорости. С ростом сопротивления в цепи ротора скорость уменьшается, вплоть до остановки двигателя. Других причин наличия скольжения нет.
Остальные ответы
потому что именно поле статора и вращает ротор.
Это как — почему дорога под машиной не движется быстрее чем крутятся колёса.
Потери от инерционного момента ротора и силы трения.
Магнитное поле всегда будет опережать ротор. Так как если они будут вращаться синхронно то магнитное поле созданное статором будет неподвижно относительно ротора. А значит в роторе не будут возникать индукционные токи, а следовательно и собственное магнитное поле.
Почему же когда ток вырубили ротор крутится!)))) А вот колесо например велосипедное, в месте касания земли, вращается медленнее, чем в верху, а спицы не выпадают!)))))
Если подшипники идеальные и нет нагрузки и потерь, то скорости совпадут.
А если ещё помогать мотору крутиться руками, то ротор будет быстрее поля)
Отличие синхронного двигателя от асинхронного электродвигателя
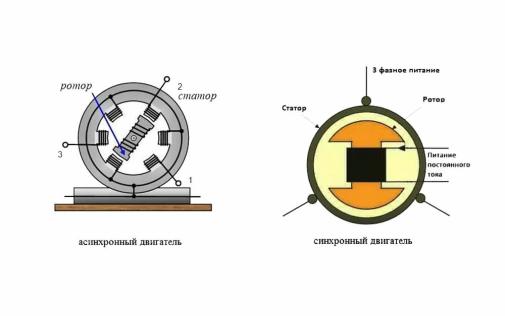
Синхронный и асинхронный двигатели отличаются конструкцией ротора. Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием, а ротор асинхронного двигателя может быть короткозамкнутым или фазным. У синхронных двигателей подвижная часть представлена постоянными или электрическими магнитами, которые служат для создания постоянного магнитного поля, взаимодействующего с вращающимся магнитным полем статорной части. У асинхронных двигателей в пазах ротора вставлено множество короткозамкнутых металлических пластин. Синхронные двигатели обладают более высокой мощностью и полезной нагрузкой, но они дороже и сложнее в использовании, поскольку для их работы требуется дополнительный источник постоянного тока. Асинхронные двигатели, в свою очередь, дешевле и проще в изготовлении, но менее точны и не могут сохранять номинальную скорость вращения.
Принцип работы синхронного и асинхронного двигателей
Синхронные двигатели: Ротор синхронного двигателя вращается точно синхронно с вращением магнитного поля статора. Это означает, что скорость вращения ротора всегда точно согласована с частотой переменного тока в системе. Асинхронные (или индукционные) двигатели: Ротор асинхронного двигателя вращается медленнее, чем магнитное поле статора. Скорость вращения ротора определяется разницей между частотой переменного тока и частотой вращения магнитного поля. Синхронные двигатели: Имеют более сложную конструкцию и требуют внешнего источника постоянного тока для создания магнитного поля на роторе. Асинхронные двигатели: Имеют более простую конструкцию без необходимости внешнего источника постоянного тока. Синхронные двигатели: Требуют внешней подачи постоянного тока для пуска. Асинхронные двигатели: Могут пускаться напрямую от переменного тока. Синхронные двигатели: Часто используются в случаях, где требуется высокая точность частоты вращения, например, в электрических генераторах. Асинхронные двигатели: Широко используются в промышленности и бытовой технике из-за их простоты и надежности. Синхронные двигатели: могут быть более эффективными при определенных условиях работы, особенно при постоянной нагрузке. Асинхронные двигатели: обычно менее чувствительны к изменениям нагрузки и могут быть более эффективны в переменных условиях. Выбор между синхронным и асинхронным двигателем зависит от конкретных требований приложения и условий эксплуатации. Основное отличие электродвигателей заключается в том, что в случае с синхронными машинами первая гармоника магнитного поля статора синхронизирована с вращением ротора (что обеспечивает вращение самого ротора на скорости магнитного поля в статоре), в то время как у асинхронных машин всегда присутствует разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (где поле вращается быстрее ротора).