Расчет стержневых систем с использованием программы SCAD Часть 2
Федеральное агентство по образованию САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ И. А. Константинов В. В. Лалин И. И. Лалина СТРОИТЕЛЬНАЯ МЕХАНИКА Расчет стержневых систем с использованием программы SCAD Учебно-методический комплекс. Показать больше
Федеральное агентство по образованию САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ И. А. Константинов В. В. Лалин И. И. Лалина СТРОИТЕЛЬНАЯ МЕХАНИКА Расчет стержневых систем с использованием программы SCAD Учебно-методический комплекс Часть 2 Санкт-Петербург Издательство Политехнического университета 2009 Спрятать
- Похожие публикации
- Поделиться
- Код вставки
- Добавить в избранное
- Комментарии
Расчет плоских ферм и арок. Расчетная схема фермы с принятой нумерацией узлов и стержней , страница 2

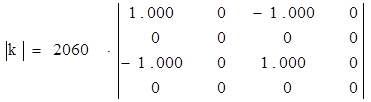
Рис. 7. К заполнению глобальной матрицы жесткости. Блоки матрицы |k| стержня (0):
а) левый верхний; б) левый нижний; в) правый верхний; г) правый нижний.
Аналогичный подход применяется к определению местоположения блоков матриц отдельных стержней в глобальной матрице жесткости фермы для каждого стержня. Для стержня (1) индексы расстановки блоков матрицы |k| в глобальной матрице |K| будут
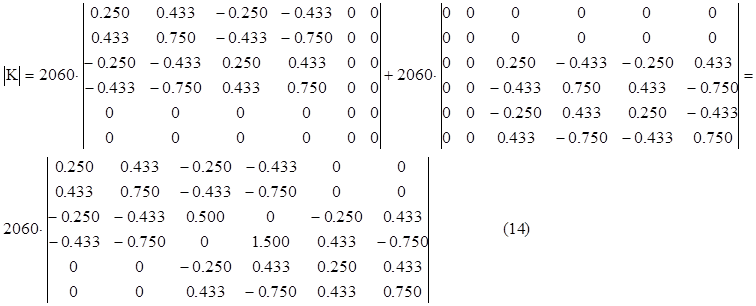
При первом сложении матрицы  с матрицей
с матрицей  стержня (0) с учетом правила расположения блоков матрицы жесткости отдельного стержня получим
стержня (0) с учетом правила расположения блоков матрицы жесткости отдельного стержня получим

При втором сложении матрицы  с матрицей стержня (1) получим
с матрицей стержня (1) получим
Матрица-столбец неизвестных перемещений выглядит как последовательное перечисление перемещений вдоль осей 0Х и 0Y каждого узла фермы
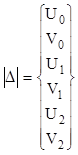
.
Из внешних нагрузок в первом тестовом примере приложена только одна к узлу 1 против оси 0Y. По всем другим направлениям и в других узлах внешние силы равны нулю. Матрица-столбец внешних сил выглядит как последовательное перечисление сил вдоль осей 0Х и 0Y каждого узла фермы
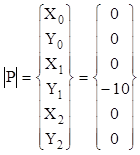
.
Перепишем систему уравнений для определения перемещений узлов фермы в виде (1)
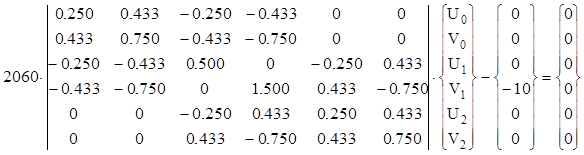
. (15)
Заметим, что перемещение вдоль оси 0Х узла 0 равно нулю, так как по этому направлению в этом узле установлена линейная связь. А это означает, что соответствующие строка (уравнение равновесия нулевого узла вдоль оси 0Х — нулевая строка в глобальной матрице жесткости, матрице неизвестных перемещений и матрице внешних сил) и столбец (коэффициенты уравнения равновесия нулевого узла вдоль оси 0Х — нулевой столбец в матрице жесткости) можно вычеркнуть. Этим мы и учтем рассматриваемую внешнюю связь, и сократим порядок решаемой системы уравнений, что приведет к экономии времени вычислений. По такому же принципу учтем наличие внешних связей вычеркиванием из СУ (15) вместе с нулевой строкой и столбцом еще строки и столбцы с номерами 1, 4, 5. Так как индексация принята с нуля, то строка 5 — последняя по номеру.
Окончательная система уравнений выглядит как

.
Решение этой системы уравнений: U1 = 0, V1 = -0.0032 см. Знак минус означает, что перемещение узла 1 произойдет вниз против оси 0Y.
При деформировании фермы координаты узла 1 изменились: координата x — 50 см, y — 86.5993 см.
При определении деформаций стержня будет пользоваться следующей последовательностью действий (соответствует расчету ферм по недеформированной схеме; подобный алгоритм определения деформаций используется в SCAD):
— по координатам узлов стержня после деформирования фермы определяем его новую длину (рис. 8)

lk новая = ,
где xнч, yнч — координаты начального узла (любой из двух) фермы после ее деформирования;
xкн, yкн — координаты конечного узла (отличный от начального) фермы после ее деформирования;
— определяем новый угол наклона стержня также по координатам его узлов

;
— определяем разность углов наклона по модулю нового положения стержня и первоначального (угол отклонения)
;
— находим проекцию новой длины стержня

;
— деформация стержня (отрицательная деформация — сжатие, положительная — растяжение)
.
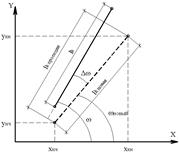
Рис. 8. К определению деформаций стержня.
Первоначальная длина стержня (0) равна 100 см, а из решения прямоугольного треугольника новая длина —  см. Угол отклонения от первоначального положения (до деформирования фермы)
см. Угол отклонения от первоначального положения (до деформирования фермы)  рад. Проекция новой длины — 99.9971971 см. Деформация
рад. Проекция новой длины — 99.9971971 см. Деформация  . Усилие в стержне сжимающее
. Усилие в стержне сжимающее  kH. Такое же усилие по величине и по знаку возникает в стержне (1).
kH. Такое же усилие по величине и по знаку возникает в стержне (1).
Тестовый пример №2.
Потренируемся еще, взяв исходные данные из примера № 1, добавив горизонтальный стержень (2) с теми же характеристиками (рис. 9) и убрав внешнюю связь в узле 2 по направлению оси 0Х (шарнирная ферма). Внешнюю нагрузку оставим без изменения.
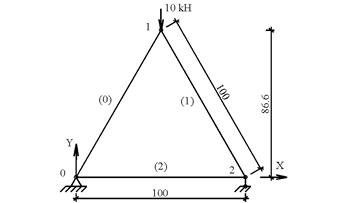
Рис. 9. Расчетная схема фермы тестового примера № 2.
Находим матрицу жесткости стержня (2).

Также вынесем за пределы знака матрицы множитель и запишем матрицу жесткости стержня (2)


 .
. (16)
(16)
Геометрически изменяемая система (SCAD)
Подскажите новичку как избавиться от геометрической изменяемости рамы в SCAD. В чём здесь ошибка?
И ещё вопрос: почему SCAD отказывается иногда выполнять поворот местных осей элементов на угол или поворачивает визуально на другой угол (например 90 вместо 45)?
Заранее благодарен.
Последний раз редактировалось Кулик Алексей aka kpblc, 13.02.2014 в 01:14 .
Просмотров: 412888
Регистрация: 20.02.2015
Сообщений: 14
Сообщение от Nick2
А совпадающие узлы Вас не смущают?
Спасибо, помогло. Это значит, что у меня в одной точке было два узла, если я правильно понял.
| Дмитрий07071993 |
| Посмотреть профиль |
| Найти ещё сообщения от Дмитрий07071993 |
Регистрация: 20.02.2015
Сообщений: 14
Геометрически изменяемая система по направлению в узлах, нулевая строка матрицы жесткости по направлению в узлах 2016, 3381, 3446.
| ТЦ проемы.SPR (398.1 Кб, 307 просмотров) |
| Дмитрий07071993 |
| Посмотреть профиль |
| Найти ещё сообщения от Дмитрий07071993 |
Сараи, эстакады, этажерки и прочий металлолом
Регистрация: 16.03.2013
Новомосковск (Тула)
Сообщений: 3,113
Сообщение от Дмитрий07071993
Геометрически изменяемая система по направлению в узлах, нулевая строка матрицы жесткости по направлению в узлах 2016, 3381, 3446.
Попробовал бы сперва сам посмотреть, прежде чем выкладывать. Простейшие ошибки на лицо:
Узел 3446 не сопряжен с элементом 292
В узлах 2016 и 3381 все 3 стержня приходят с шарнирами на концах
Регистрация: 17.04.2015
Сообщений: 9
доброго времени, помогите с ошибками .. пишет, что ошибка при разложении матрицы 99 .. я так понимаю, что это геометрически изменяемая система .. битый час все перепроверял, без нижнего пояса галереи расчет идет отлично .. пару раз перенабрал нижний, результата не дало .. ХЕЛП! ХЕЛП!
| галерея без нижнего пояса.SPR (137.5 Кб, 94 просмотров) |
Сараи, эстакады, этажерки и прочий металлолом
Регистрация: 16.03.2013
Новомосковск (Тула)
Сообщений: 3,113
zozebaka, смени тип схемы и тип элементов. 4тип для данной схемы не подходит
Регистрация: 17.04.2015
Сообщений: 9
а это возможно сделать каким-то легким способом, чтобы не перенабирать всю схему? .. и как это сделать?
—— добавлено через ~3 мин. ——
как поменять прочитал, но теперь вопрос стоит в том на какую менять?
Регистрация: 08.10.2014
Сообщений: 12
Добрый день господа конструкторы.
Возникает проблема при линейном расчете,
Разложение матрицы жесткости многофронтальным методом.
17:08:37
Геометрически изменяемая система по направлению 1 в узлах:
198 667 r 676 3 1139 1142 28772
17:08:37
Геометрически изменяемая система по направлению 2 в узлах:
23 198 667 r 676 3 1139 1142 28772
17:08:37
Геометрически изменяемая система по направлению 3 в узлах:
2023
17:08:37
Геометрически изменяемая система по направлению 4 в узлах:
198 667 r 676 3 1139 1142 28772
17:08:37
Геометрически изменяемая система по направлению 5 в узлах:
198 667 r 676 3 1139 1142 28772
17:08:37
Геометрически изменяемая система по направлению 6 в узлах:
198 667 r 676 3 1139 1142 28772
17:08:37
ПОМОГИТЕ (файл прикреплен)
| ВИЛЛА В АСТАНЕ.rar (271.1 Кб, 86 просмотров) |
SCAD для чайников dnl8193
19.1.6. Фрагменты, подсхемы, суперэлементы Расчетную схему часто удобно представить в виде объединения различных фрагментов , каждый из которых с какой — то точки зрения имеет смысл рассматривать как нечто целое . Это могут быть функционально связанные части ( например , каркас одного из этажей многоэтажного здания ) или части с общей конструктивной системой ( перекрытие , стена ), или , наконец , чисто геометрически отличная часть системы ( например , одна из граней многогранной оболочки ). Далее , говоря о фрагментах , мы будем иметь в виду часть схемы , выделяемую из системы по критерию , назначаемому расчетчиком . Однако сама по себе программная система с фрагментом никаких операций не производит и все , что с ним нужно сделать в процессе расчета , пользователь должен определить сам в явном виде ( произвести унификацию , выдать результаты на печать и т . п .). В программном комплексе имеется возможность для специальным образом описанных фрагментов проводить определенные операции ( главным образом , в процессе ввода информации ). Такие фрагменты мы будем называть подсхемами . Подсхема имеет все черты расчетной схемы , она состоит из узлов и элементов , имеет связи , шарниры и т . д . Далее при создании системы в целом с подсхемой обращаются как с единым целым , определяя ее место в системе ( основной схеме ) путем совмещения некоторых узлов подсхемы , играющих роль узлов обычного конечного элемента , с узлами основной схемы . Подсхема , используемая не только при вводе информации , но и при организации вычислительного процесса , называется суперэлементом . Суперэлементное моделирование особенно целесообразно использовать в тех случаях , когда один и тот же суперэлемент входит в схему неоднократно . Тогда результаты вычислений , выполненные для первого из общего числа однотипных суперэлементов , используются и для всех других его повторений , что существенно сокращает количество вычислений . 19.1.7. Нагрузки и воздействия Взаимодействие системы с окружающей средой представляется обычно в виде нагрузок или воздействий , приложенных к узлам системы ( узловые нагрузки ) или к внутренним точкам ее конечных элементов ( местные нагрузки ). Местные нагрузки могут быть силами и моментами , сосредоточенными или распределенными по линиям , площадям и объемам . Иногда нагружение системы представляется в форме температурных воздействий на элементы или заданными смещениями в узлах . Т . е . эти воздействия проявляются не как силовые , а как кинематические факторы . Если воздействия меняются во времени , то вызванные ими ускорения масс системы приводят к появлению инерционных сил . В тех случаях , когда силами инерции пренебречь нельзя , говорят о динамическом характере воздействия , но всегда следует помнить , что отнесение воздействия к классу статических или динамических связано не только с их собственными свойствами , но и с инерционными характеристиками системы . Совокупность нагрузок и воздействий , одновременно приложенных к системе и рассматриваемых совместно , называется ее загружением . Иногда к одному загружению относят лишь ту часть одновременно приложенных нагрузок , которая связана общим происхождением ( например , только силы давления колес одного мостового крана или нагрузки от снега на покрытие лишь в одном пролете многопролетного здания ) или же имеет какие — то другие общие свойства ( например , установленный нормами коэффициент надежности по нагрузке ). Если при этом впоследствии возникает необходимость учесть эффект совместного действия нескольких загружений такого рода ( их сумму , взятую с некоторыми коэффициентами ), то говорят о комбинации загружений и соответственно о коэффициентах такой комбинации . Поскольку загружения могут в различные моменты времени образовывать различные комбинации и возможное число таких комбинаций ( сочетаний ) достаточно велико , то возникает нетривиальная задача отыскания таких сочетаний внешних воздействий , которые приводят к наиболее неблагоприятным последствиям для некоторого проверяемого элемента или его сечения . В этом случае будем говорить об отыскании расчетного сочетания усилий ( РСУ ). Решая эту задачу , следует помнить о логической связи между загружениями , определяемыми природой действующих на систему нагрузок или же предписаниями
1 9 . Т е о р е т и ч е с к и е о с н о в ы
нормативных документов . Такие логические связи иногда определяют невозможность одновременного действия ( несовместность ) некоторых нагрузок , таких , например , как ветровой напор от ветров различного направления . В других случаях , наоборот , требуется обязательный учет какого — либо загружения при рассмотрении вполне определенного другого загружения ( например , сила трения возможна лишь при одновременном учете и силы нормального давления ), хотя обратная связь такого рода может и отсутствовать ( нормальное давление в отсутствие трения вполне можно рассматривать самостоятельно ). Необходимо отметить , что использование комбинаций загружений или же отыскание расчетного сочетания усилий основано на принципе суперпозиции и , следовательно , имеет смысл лишь для линейных систем . При учете нелинейности любого рода необходимо описывать все действующие на систему нагрузки в рамках одного загружения .
1 9 . Т е о р е т и ч е с к и е о с н о в ы
19.2. Основные соотношения метода конечных элементов 19.2.1. Линейная статическая задача Теоретической основой комплекса SCAD является метод конечных элементов ( МКЭ ) в форме метода перемещений . Выбор именно этой формы объясняется простотой алгоритмизации и физической интерпретации , возможностью создания единых методов построения матриц жесткости и векторов нагрузок для различных типов конечных элементов , возможностью учета произвольных граничных условий и сложной геометрии рассчитываемой конструкции . Детальное описание метода с подробной аргументацией содержится в многочисленных литературных источниках ( см ., например , работы [10, 26, 27 и др .]). В этом разделе будет дано лишь конспективное изложение основных расчетных зависимостей . Напряженно — деформированное состояние каждой материальной точки x конечного элемента , имеющего объем V и поверхность S, описывается векторами напряжений σ(x) и деформаций ε(x), которые для линейной задачи теории упругости выражаются через вектор перемещений u(x) следующим образом :
| σ = Mε; ε = Bu , | (19.1) |
где : B – линейный матричный дифференциальный оператор ; M – симметричная , положительно определенная матрица упругости закона Гука , зависящая только от жесткостных характеристик материала конструкции . Полная потенциальная энергия элемента определяется по формуле
| Π (e) = 1/ 2 ò ε T Mε dV − ò u T pdV − ò u T q dS , | (19.2) | ||
| v | v | s | |
где p и q – векторы объемных и поверхностных сил соответственно . Перемещения u( х ) любой точки рассматриваемого элемента приближенно представляются через неизвестные смещения узлов Z выражениями вида
| u(õ) = å ϕ i (x) Z i = Φ (x)Z e , | (19.3) |
| i |
где : ϕ i (x) – интерполяционные функции , называемые обычно функциями формы , и подчиняющиеся определенным условиям гладкости для обеспечения сходимости метода [26]; Φ(x) – матрица
| интерполяционных функций ; Z e | – вектор всех неизвестных смещений узлов рассматриваемого элемента | ||
| ( индекс “ е ”). | |||
| Подстановкой (19.1) и (19.3) в (19.2) получаем | |||
| Ï (å) =1/2 Z e Ò ( ò (BΦ) T MBΦ dV)Z e − ( ò p T Φ dV + ò q T Φ dS)Z e | (19.4) | ||
| v | v | s | |
| Выражение (19.4) можно представить в следующем виде | |||
| Ï (å) = 1/2 Z e Ò K (e) Z e — f e T Z e , | (19.5) | ||
| где : K (e) = ò (BΦ) T MBΦdV – | матрица жесткости | элемента ; f e T = ò p T ΦdV + | ò q T ΦdS – вектор |
| v | v | s | |
| приведенных узловых сил . | |||
| Полная потенциальная энергия системы получается суммированием по всем ее элементам | |||
| Ï = å Π (e) , | (19.6) | ||
| e | |||
| а ее минимизация дает систему разрешающих уравнений МКЭ | |||
| KZ = f | (19.7) | ||
1 9 . Т е о р е т и ч е с к и е о с н о в ы
с глобальной матрицей жесткости K и вектором узловых сил f, полученными путем суммирования соответствующих членов матриц жесткости K (e) и векторов f (e) отдельных конечных элементов , что является важным преимуществом рассматриваемого подхода . Для МКЭ в перемещениях известны условия сходимости и оценки погрешности . Условиями сходимости являются линейная независимость и полнота системы базисных функций , а также их совместность ( конформность ), либо условия , компенсирующие несовместность . Известны легко проверяемые условия , позволяющие установить полноту базисных функций , их совместность или выполнение условий , компенсирующих несовместность . Эти условия имеют вид равенств , которым должны удовлетворять базисные функции на каждом конечном элементе . Такая теоретическая основа позволяет не только исследовать корректность применения известных конечных элементов , но и разработать принципы конструирования новых совместных и несовместных элементов и получить для них оценки погрешности . Библиотека конечных элементов комплеса содержит большое количество элементов , моделирующих работу различных типов конструкций . Содержатся широко известные элементы стержней , четырехугольные и треугольные элементы для расчета плоского напряженного состояния , плиты , оболочки , элементы пространственной задачи – тетраэдр , параллелепипед , трехгранная призма . В библиотеку включен ряд новых элементов : несовместные треугольные и прямоугольные элементы изотропных и ортотропных плит и оболочек , плит на упругом основании , многослойных плит и оболочек ; построенные методом подобластей совместные треугольные и четырехугольные элементы для расчета плоского напряженного состояния , плиты и оболочки , допускающие узлы на сторонах . Основой этих элементов являются элементы для расчета плоского напряженного состояния с двумя и плиты с тремя степенями свободы в узле . Библиотека содержит изопараметрические элементы для расчета плоского напряженного состояния и пространственные , одномерный и двумерный ( треугольный и четырехугольный ) осесимметричные элементы . Кроме того , в библиотеке имеются различные специальные элементы , моделирующие связь конечной жесткости , упругую податливость между узлами , нуль — элементы различных видов , элементы , задаваемые численной матрицей жесткости . Все конечные элементы , включенные в библиотеку , теоретически обоснованы , для них имеются оценки погрешности по энергии и по перемещениям . Интегральная погрешность по усилиям оценивается величиной , пропорциональной h τ , где h – максимальный из размеров конечных элементов , τ = 2 – для прямоугольных элементов плиты , τ = 1 – для остальных элементов . Погрешность по перемещениям оценивается величиной , пропорциональной h τ , где τ = 4 – для совместных прямоугольных и четырехугольных элементов плиты , τ = 2 – для остальных элементов . Теоретически обоснована также возможность расчета криволинейных стержней прямолинейными элементами и произвольных оболочек – треугольными и прямоугольными ( для цилиндрических оболочек ) элементами плоской оболочки . Погрешность по энергии и перемещениям оценивается в этом случае величиной , пропорциональной h ( подробнее см . п .20.1). 19.2.2. Учет дополнительных связей Если перемещения Z стеснены условиями связи CZ = 0, (19.8) то только часть компонент вектора Z допускает свободное варьирование , и для учета этих связей в работе [17] было предложено использовать модифицированную функцию Лагранжа
| Ï LÌ = 1/2Z T (K + C T D o C)Z — Z T f + ρ T CZ, | (19.9) |
в которой D o есть некоторая симметричная положительно определенная матрица , а ρ – вектор Лагранжевых множителей ( реакций в связях ). Условия стационарности функционала (19.9) дают систему уравнений
| KZ + (C T D o C)Z + C T ρ = f; | (19.10) |
| CZ = 0. | |
| Следует отметить , что матрица С должна содержать только линейно независимые | строки , в |
противном случае ( постановка дублированных связей ) в системе может оказаться статически неопределимая
1 9 . Т е о р е т и ч е с к и е о с н о в ы
подконструкция , целиком состоящая из абсолютно жестких элементов , что ведет к вырождению задачи . Во всех остальных случаях система уравнений (19.10) имеет отличный от нуля определитель , включая и те случаи , когда матрица К вырождена ( конструкция без дополнительных связей изменяема ), но ее дефект не превышает ранга матрицы С . При этом в отличие от обычного метода Лагранжа возможно исключение неизвестных в порядке их нумерации . Добавление к матрице жесткости K произведения C T D o C соответствует включению в конструкцию некоторого упругого элемента со специальными свойствами (“ нуль — элемента ”), который включается параллельно бесконечно жесткой связи и поэтому не искажает результаты расчета . В [17] детально рассмотрены возможные способы конструирования таких “ нуль — элементов ”, часть из них использована при разработке комплеса SCAD. 19.2.3. Динамическая задача Если нагрузки на систему меняются во времени , т . е . f = f(t), то следует полагать функциями времени также усилия и перемещения , что может потребовать введения в рассмотрение скоростей dZ/dt и ускорений d 2 Z/dt 2 . Когда возникающие при этом силы инерции
| J(t) = M(d 2 Z/dt 2 ) | (19.11) |
не могут считаться пренебрежимо малыми по сравнению с нагрузками на систему и с силами упругости , то их следует учесть при формировании условий равновесия , которые примут вид дифференциальных
| уравнений | |
| M(d 2 Z/dt 2 ) + KZ(t) = f(t). | (19.12) |
| Если все массы сосредоточены в узлах системы , то матрица масс М | будет диагональной , в |
остальных же случаях приведение ее к диагональному виду представляет собой приближенный подход ( он применен при разработке комплекса ). Задача определения характеристик собственных колебаний системы ( модальный анализ ) заключается в нахождении условий , при которых ненагруженная система совершает гармонические
| колебания по закону | |
| Z(t) = Ysin(wt + j). | (19.13) |
В выражении (19.13) вектор Y характеризует форму собственных колебаний ( соотношения между смещениями узлов ), w – их частоту , j – начальную фазу . Подстановка (19.13) в (19.12) с учетом того , что f(t) = 0 дает уравнение для собственных колебаний
| (K — w 2 M) Y= 0, | (19.14) |
нетривиальное решение которого существует лишь тогда , когда величины w i (i = 1. n), называемые собственными частотами , обращают в нуль детерминант матрицы (K — w 2 M). Соответствующие им формы собственных колебаний Y i вычисляются лишь с точностью до произвольного множителя . Этот множитель назначен таким образом , что максимальная компонента вектора Y i равна единице . Следует также отметить свойство ортогональности собственных векторов как относительно матрицы масс , так и относительно матрицы жесткости , т . е .
| Y i Ò MY j = 0 è Y i Ò KY j = 0 ïðè i ¹ j. | (19.15) |
При динамическом расчете число компонент вектора Z, с которыми связаны инерционные силы ( количество динамических степеней свободы ), зачастую бывает намного меньшим , чем при статическом расчете . Типичным примером могут служить повороты узлов , обычно оказывающие значительно меньшее динамическое влияние , чем их линейные смещения . В SCAD инерционные моменты , соответствующие поворотам узлов и другие инерционные характеристики могут быть проигнорированы , однако это уже задает сам пользователь , формулируя задачу динамического расчета . Если часть инерционных составляющих нагрузки не учитывается , то разделяя вектор Y на подвектор Y O , для которого силы инерции равны нулю , и подвектор Y I , связанный с инерционными силами , можно записать систему (19.14) в форме
| K OO Y O + K OI Y I = 0; | |
| K IO Y O + K II Y I = w 2 M II . | (19.16) |
1 9 . Т е о р е т и ч е с к и е о с н о в ы
Из этой системы исключается подвектор Ψ O и в результате указанной процедуры “ статического уплотнения ” размерность задачи модального анализа резко уменьшается и она приобретает вид
| (K OO -1 M II — λ 2 I) Ψ I = 0, | (19.17) |
где I – единичная матрица , а λ = 1/ω. В качестве результатов модального анализа SCAD выдает собственные числа λ i и собственные векторы Ψ I задачи (19.17). С ними связаны круговая частота ω = 1/λ ( рад / сек ), циклическая частота θ = ω/2π ( герц ) и период Т = 1/θ. В силу ортогональности форм собственных колебаний решение любой динамической задачи в виде разложения
| Z(t) = å y i (t) Ψ i | (19.18) |
| i |
ведет к распаду системы дифференциальных уравнений (19.12) на независимые относительно обобщенных координат y i (t). Эти уравнения с учетом пропорционального скорости дополнительного члена , с помощью которого учитывается сопротивление движению , имеют вид
| d 2 y i /dt 2 + 2 ξ i dy i /dt + ω i 2 y i = P i (t)/M i . | (19.19) | ||
| Обобщенные силы | |||
| P i (t) = ω 2 Ψ T i f(t), | (19.20) | ||
| массы | |||
| M i = Ψ T M Ψ i | (19.21) | ||
| i | |||
| и параметры затухания ξ i , совместно с начальными условиями | y o i | и y 1 i , получаемыми из Z o = Z(0) и | |
| Z 1 = dZ(0)/dt по формулам | |||
| y o i = Ψ T MZ o , | y 1 i = Ψ T MZ 1 | (19.22) | |
| i | i | ||
| полностью определяют решение задачи . Это решение дается выражением | |||
| y i = exp[-ξ i ω i t] <[(y o i ξ i ω i + y 1 i )/ ω Di ] sinω Di t | + | y o i > + | |
| t | |||
| + (1/ ω Di M i ) ò P i (t) exp[- ξ i | ω i (t — τ )] sin ω Di (t — τ )d τ , | (19.23) | |
| 0 | |||
в котором первое слагаемое учитывает начальные условия , а второе носит название интеграла Дюамеля . Входящая в выражение (19.23) частота демпфированных колебаний
| ω Di = ω i (1 — ξ I 2 ) 1/2 | (19.24) |
| мало отличается от ω i при обычных значениях логарифмического декремента | |
| δ = 2 πξω / ω D ≈ 2 πξ . | (19.25) |
1 9 . Т е о р е т и ч е с к и е о с н о в ы
19.3. Решение систем уравнений После того , как заданная конструкция представлена в виде конечноэлементной структуры , задача об определении перемещений узлов сводится к решению системы линейных алгебраических уравнений вида
где : K – симметричная положительно определенная матрица размером N×N; F – матрица правых частей ( загружений ) размером N×k (k – количество загружений ); Z – искомая матрица перемещений размером k×N. Поскольку в большинстве случаев матрица K является разреженной , то для уменьшения требуемой оперативной памяти , внешней памяти и времени счета предварительно производится перенумерация неизвестных системы (19.26) с целью минимизации профиля матрицы ( рис .19.2). Рис .19.2 В комплексе SCAD реализовано несколько методов перенумерации , а именно , обратный алгоритм Катхилла — Макки , метод — фактор деревьев , метод вложенны x сечений и алгоритм параллельных сечений . Описание этих методов и их сравнительная характеристика приведены в специальной литературе . Пользователю предоставлена возможность выбора метода перенумерации . По умолчанию используется обратный алгоритм Катхилла — Макки , т . к . у этого метода минимальные запросы к оперативной памяти . Мы не можем дать конкретные рекомендации для выбора метода перенумерации , т . к . эффективность того или иного алгоритма значительно зависит от структуры конкретной матрицы К . Для решения системы (19.26) предварительно производится треугольное разложение матрицы К модифицированным методом Гаусса с выбором разрешающего элемента на главной диагонали в порядке следования перенумерованных неизвестных . Если в процессе треугольного разложения матрицы K один из разрешающих элементов окажется равным нулю , т . е . выяснится , что K – вырождена , что свидетельствует о геометрической изменяемости системы , то производится автоматическое наложение дополнительной ненапряженной связи , превращающей систему в неизменяемую . При этом пользователю предоставляется информация о номерах узлов и типах степеней свободы , по которым произведено наложение связей . Заметим , что вырождение идентифицируется не по точному равенству разрешающего элемента нулю , а по появлению на главной диагонали числа
1 9 . Т е о р е т и ч е с к и е о с н о в ы
“ практически равного нулю ” и выбор этого порога ( параметр точности решения ) является одним из параметров , которым пользователь может распорядиться сам . Когда сообщения об установке дополнительных связей появляются в протоколе решения задачи , мы рекомендуем внимательно проанализировать расчетную схему и выяснить причину происхождения геометрической изменяемости конструкции . Возможно для анализа понадобится решить задачу снова с другим значением параметра точности решения . Дополнительным сервисным средством является контроль решения системы (19.26). При появлении сообщения о большой величине ошибки решения , которое , как правило , является следствием плохой обусловленности матрицы K, следует внимательно проанализировать перемещения узлов и убедиться в том , что полученное решение является приемлемым с инженерной точки зрения . Плохая обусловленность чаще всего связана с неудачной конструкцией рассчитываемой системы ( например , случай “ почти изменяемой ” системы ) или ее неудачной идеализацией .
1 9 . Т е о р е т и ч е с к и е о с н о в ы
19.4. Стандартные случаи динамического нагружения Комплекс SCAD дает решения задачи для динамических нагрузок следующих классов : – пульсации ветрового потока по СНиП ; – сейсмическая нагрузка в форме , предусмотренной [24]; – импульсная и ударная нагрузка для различных законов изменения во времени ; – гармоническая нагрузка ; – сейсмическое возбуждение в форме задания произвольной акселерограммы . Ниже рассматриваются вопросы , связанные с постановкой соответствующих задач и особенностями их реализации . 19.4.1. Ветровая нагрузка В основу методики положен подход из раздела 10 справочника [5], где задача о действии турбулентных пульсаций ветрового потока поставлена как задача статистической динамики . Давление ветра на сооружение в точке , расположенной на высоте z от уровня земли , рассматривается как сумма статической и пульсационной составляющих ветровой нагрузки
| q(z,t) = q s (z) + q p (z,t). | (19.27) |
| Последняя есть случайная функция времени , обусловленная случайной скоростью пульсаций , | |
| имеющей нулевое среднее , стандарт σ(z) и безразмерный спектр Давенпорта | |
| S( ε ) = 1200 ε 5/3 /[3v o (1 + ε 2 ) 4/3 ], | (19.28) |
где v o – среднечасовая скорость ветра на высоте 10 м ; ε = v o /1200θ – безразмерный период колебаний . С учетом упрощений , достигаемых за счет предположения о полной коррелированности ( пульсации скорости ветра рассматриваются как синхронные по пространству случайных функций только времени ) среднеквадратичное смещение по j- ой компоненте вектора Z представляется в виде
| s | |
| Z ä.j = å ( η 2 ij μ 2 i )/ ω 4 i . | (19.29) |
i=1 Здесь s – число учитываемых форм собственных колебаний , η ij – приведенное ускорение , вычисляемое по формуле
| η ij = ( Ψ ij å σ k Ψ ik )/ | å M r Ψ ir , | (19.30) |
| k | r | |
| а квадрат коэффициента динамичности определяется так : | ||
| ∞ | ||
| μ 2 = (2/3) ò ε 11/3 (1 + ε 2 ) -4/3 [ ε 4 — 2(1 — γ 2 /2) ε 2 ε 2 i + ε 4 i ] -1 d ε . | (19.31) | |
| 0 | ||
Параметр затухания γ связан с логарифмическим декрементом δ зависимостью γ = δ/π, а через ε i обозначен безразмерный период собственных колебаний ε i = v o /1200θ. Расчетные статические перемещения связаны с первым слагаемым в (19.27), а динамические – определяются по формуле (19.29). Усилия в элементах системы и перемещения ее точек ( обобщенно – отклик сооружения Х ) находятся раздельно от статической составляющей ветровой нагрузки и от инерционных сил , соответствующих каждой форме собственных колебаний . Суммарное значение отклика
| определяется по формуле | |
| X = X c ± [ å (X i d ) 2 ] 1/2 , | (19.32) |
| i |
1 9 . Т е о р е т и ч е с к и е о с н о в ы
из которой видно , что колебания совершаются вокруг смещенного состояния равновесия , соответствующего статической ( средней ) компоненте нагружения . Комплекс выдает отдельные составляющие динамического отклика X d i и суммарное значение (19.32), причем знак перед вторым слагаемым принимается таким же , как и у компоненты X c . 19.4.2. Сейсмика В основу норм [24] положен спектральный подход , в соответствии с которым расчетная спектральная кривая ( закон изменения коэффициентов динамичности ) определяет динамическую реакцию простого маятника на ускорение точки подвеса при сейсмическом возмущении . В общем случае при ускорениях основания сооружения d 2 z o /dt 2 , происходящих при землетрясении , инерционные силы (19.11) определяются абсолютными ускорениями , которые суммируются с относительными ускорениями от деформации сооружения
| J c (t) = M(d 2 Z/dt 2 — d 2 z o /dt 2 ), | (19.33) |
| что при подстановке в (19.12) дает фиктивную нагрузку | |
| f c (t) = M d 2 z o /dt 2 . | (19.34) |
От воздействия (19.34) решение ищется путем разложения по формам собственных колебаний в форме интеграла Дюамеля ( см . раздел 3 справочника [5]) и в конце концов приводится к расчету на инерционные силы S ik , действующие по направлению k- ой массы при колебаниях по i- ой форме
| S ik = Q k K c b(T i )h ik cosj ok . | (19.35) |
| Здесь Q k – вес k- ой массы ; K c – коэффициент сейсмичности , | зависящий от бальности землетрясения |
( напоминаем , что переход к следующему баллу связан с удвоением мощности землетрясения ) и от класса сооружения ; b – коэффициент динамичности , зависящий от периода собственных колебаний рассматриваемой формы и определяемый по формуле
| b = a /T (b £ b ), | (19.36) |
где константы a и b связаны с категорией грунта основания ; η ik – приведенные ускорения (19.30); j ok – угол между направлением сейсмического толчка и смещением Z k . От нагрузок (19.35) определяются отклики X i для каждой из учитываемых форм колебаний , затем находится максимальный из них X a = max i ï X i ï и определяется расчетное значение
| X = [X 2 a ± å (X i ) 2 ] 1/2 . | (19.37) |
i ¹a 19.4.3. Импульсные нагрузки Импульсные нагрузки являются кратковременными силами или ударами , время действия которых t не превышает 2,5 Т s , где Т s есть период наименьшей из учитываемых форм колебаний ( см . раздел 5 справочника [5]). Различают однократные импульсы , для которых нагрузка f(t)=0 при t > t , и импульсы многократного действия , из числа которых чаще всего выделяют периодические импульсы , повторяющиеся несколько раз через равные промежутки времени Т о .