При выводе пусковых резисторов частота вращения якоря
Копировать текст
На этом сайте не надо искать списки с вопросами, здесь надо набирать нужный вопрос в поле поика оно находится выше
длиная белая полоса с крестиком. Так быстрее найдешь ответ.
На сайте имеются ответы на СДО, АСПТ, АОС-Д, КАСКОР, КАСАТ, КАСАНТ, ПРОМБЕЗОПАСНОСТЬ, ММУ, СИНЕРГИЯ
Поделится с коллегами:
ЗАРЕГИСТРИРУЙТЕСЬ ИЛИ НАЖМИТЕ «ВХОД» И ВВЕДИТЕ ПОЧТУ И ПАРОЛЬ ПОВТОРНО!
При выводе пусковых резисторов частота вращения якоря: СДО
При выводе пусковых резисторов частота вращения якоря: СДО
Пройду за Вас любое СДО одна тема от 35р.
Пройду КАСКОР, КАСАТ, КАСАНТ, АОС, АСПТ
Помощь студентам в прохождении любых тестов
Если нужна помощь СМЕЛО пиши мне во ВК
Оплата после того как пройду.
Эта часть вопроса(ов) ознакомительная. Ответ находится ниже
| При выводе пусковых резисторов частота вращения якоря: СДО |
|---|
| 1. Уменьшается |
| 2. Не меняется |
| 3. Увеличивается |
| 4. Становится равномерной |
Доступ к правильному ответу закрыт Посмотреть ответ (Тык сюда!)
Правильный ответ выделен зеленым цветом.
Если выделено несколько вариантов, то все они являются правильными.
Если вдруг найдете неправильный ответ — напишите об этом в комментариях, обязательно исправим!
ПОМОЩЬ (КАК ПОЛЬЗОВАТЬСЯ САЙТОМ СМОТРИТЕ ВИДЕО)
Наш онлайн-проект «ПроКонспект» является Вашим индивидуальным интернет-помощником.
По оформлению сайта, рекламе и багам обращайтесь к администратору в группе ВКонтакте
Администрация сайта ПроКонспект.рф
Метрика
Все права защищены.
При выводе пусковых резисторов частота вращения якоря
12 ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И АППАРАТЫ
УКАЖИТЕ НОМЕР ПРАВИЛЬНОГО ОТВЕТА
1. На рисунке показан способ регулирования скорости двигателя постоянного тока параллельного возбуждения

1) изменением сопротивления R в в цепи возбуждения;
2. Изменение направления вращения якоря двигателя постоянного тока последовательного возбуждения, возможно
1) при изменении полярности напряжения на зажимах обмотки возбуждения;
3. Приведенная на рисунке характеристика при переходе работы двигателя постоянного тока параллельного возбуждения из точки 1 в точку 2 соответствует электромагнитному торможению

4. Приведенная на рисунке электромеханическая характеристика n = f ( I я ) соответствует
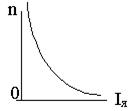
1) двигателю постоянного тока последовательного возбуждения.
5. В двигателе постоянного тока физическая нейтраль совпадает с геометрической в режиме
1) работы без нагрузки;
6. Улучшение коммутации (уменьшение искрения) в генераторах постоянного тока можно обеспечить
1) сдвигом щеток с геометрической нейтрали по направлению вращения якоря;
7. Большая величина тока холостого хода I 0 асинхронных двигателей по сравнению с током холостого хода I 0 трансформаторов объясняется
1) наличием воздушного зазора.
8. Последствием переключения схемы соединения обмотки статора асинхронного двигателя с D на Y при пуске является
1) уменьшение пускового тока;
9. Напряжение питания оказывает следующее воздействие на величину cos j асинхронного двигателя:
1) не влияет на величину cos j асинхронного двигателя:
10. При переключении асинхронного двигателя с Y на D его синхронная скорость (частота вращения)
1) остается неизменной;
11. Изменение тока возбуждения синхронного генератора
1) сохраняет реактивную мощность неизменной.
12. При увеличении воздушного зазора между ротором и статором явнополюсной синхронной машины
1) реактивная мощность не изменится;
13. Величина обмоточного коэффициента К W обмотки статора синхронного генератора
1) влияет на величину наведенной ЭДС;
14. Компенсационная обмотка в машинах постоянного тока предназначена для компенсации
1) поперечной составляющей реакции якоря Faq ;
15. Реакция якоря машины постоянного тока это
1) воздействие магнитного поля якоря на основное поле машины;
16. Напряжение на зажимах генератора постоянного тока при увеличении нагрузки
17. Постоянная плотность тока под набегающим и сбегающим краями щеток соответствует коммутации
18. На рисунке изображен генератор
1) со смешанным возбуждением.
19. ЭДС генератора Е = 240 В. Сопротивление обмотки якоря R Я = 0,1 Ом. Величина напряжения на зажимах генератора при токе нагрузки 100 А составляет
20. Величина ЭДС при холостом ходе генератора последовательного возбуждения определяется
1) остаточным магнитным полем полюсов и частотой вращения якоря.
21. Обмотка дополнительных полюсов машины постоянного тока соединяется с обмоткой якоря
22. Величина вращающего момента двигателя постоянного тока параллельного возбуждения при увеличении тока якоря и потока возбуждения в 2 раза
1) увеличится в 4 раза;
23. Направление вращения двигателя не изменяется
1) при одновременном изменении направления тока якоря и тока возбуждения.
24. При уменьшении до нуля момента нагрузки на валу двигателя последовательного возбуждения двигатель
1) пойдет ”в разнос”.
25. В режиме холостого хода двигатель постоянного тока параллельного возбуждения потребляет 100 Вт. Мощность цепи возбуждения — 30 Вт. Постоянные потери двигателя составляют
26. При включении на напряжение U = 220 В трансформатора, рассчитанного на напряжение U = 127 В,
1) увеличатся ток холостого хода I 0 и потери в стали, уменьшится cos j .
27. В трансформаторе с активным сопротивлением вторичной обмотки r 2 = 1 Ом и коэффициентом трансформации k = 0,5 приведенное значение активного сопротивления составляет
28. Больший нагрев трансформатора происходит
1) при номинальной нагрузке.
29. При номинальной нагрузке трансформатора напряжение U 2 = 220 В. При D U 2 % = 5 %, напряжение холостого хода U 20 составляет
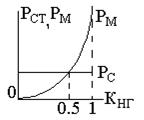
30. КПД трансформатора будет максимальным при значении коэффициента нагрузки КНГ, равном
31. Трехфазный трансформатор со схемой соединения обмоток D / Y и коэффициентом трансформации k = 1, включен в схему с линейным напряжением U 1 = 220 В. Линейное напряжение U 2 составляет
32. Переключатель напряжения повышающего трансформатора переключен из положения « + 5% » в положение « — 5% ». При этом напряжение на выходе трансформатора U 2
1) уменьшилось на 10%.
33. Мощности двух параллельно работающих трансформаторов равны. ЭДС Е2 вторичной обмотки первого трансформатора больше ЭДС Е2 вторичной обмотки второго трансформатора. Больший ток протекает
1) во вторичной обмотке второго трансформатора.
34. На рисунке приведены внешние характеристики U 2 = f ( I 2 ) двух трансформаторов. Сопротивление короткого замыкания Z к больше:
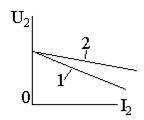
1) у первого трансформатора;
35. Для включения ваттметра в высоковольтную сеть необходимо использовать
1) трансформатор тока и трансформатор напряжения.
36. Для получения синусоидальной формы индуктируемой ЭДС зазор между ротором и статором синхронного генератора выполняют
1) меньшим у середины полюса, большим по краям;
37. В синхронном четырехполюсном генераторе обмотки соседних фаз смещены
1) на 120 электрических градусов и на 60 геометрических градусов.
38. В обмотках статора (якоря) трехфазного синхронного генератора индуктируются токи с частотой f = 50 Гц. Ротор генератора выполнен двухполюсным. Магнитное поле статора (якоря) вращается с частотой
39. При увеличении индуктивной нагрузки напряжение на зажимах синхронного генератора
40. Коэффициент мощности синхронного генератора увеличивается
1) при увеличении активной составляющей мощности;
41. Большему насыщению магнитной цепи синхронного генератора соответствует точка характеристики холостого хода

42. При увеличении активно — индуктивной нагрузки напряжение на зажимах генератора резко уменьшается из – за
1) действия двух причин, указанных выше.
43. При включении на параллельную работу синхронных генераторов, у которых частоты не равны (другие условия для включения в параллель выполнены), произойдет следующее:
1) появится уравнительный ток, резко изменяющийся по амплитуде;
44. Скольжение асинхронного двигателя s = 0,05, число пар полюсов р = 1, частота питающей сети f = 50 Гц. Частота вращения ротора составляет
45. При увеличении момента механической нагрузки на валу асинхронного двигателя скольжение s
46. Асинхронный двигатель с фазным ротором отличается от двигателя с короткозамкнутым ротором
1) наличием контактных колец и щеток;
47. Трехфазный асинхронный двигатель подключен к сети с частотой f = 50 Гц, скольжение s = 2%. Частота тока в обмотке ротора составляет
48. При увеличении скольжения s ток в обмотке ротора асинхронного двигателя
49. При увеличении в 2 раза напряжения питания асинхронного двигателя его вращающий момент
1) увеличится в 4 раза.
50. Асинхронный генератор обычно работает при скольжении s , лежащем в диапазоне
51. Регулирование частоты вращения асинхронного двигателя (плавное и в широком диапазоне) изменением частоты f напряжения питания
1) возможно только при использовании преобразователя частоты с изменением частоты и, одновременно, величины напряжения питания.
52. Торможение асинхронного двигателя методом противовключения осуществляется
1) переключением проводов 2-х фаз, подключенных к обмотке статора.
53. Пусковой момент асинхронного двигателя с глубокими пазами при увеличении активного сопротивления обмотки ротора
54. Трансформаторное масло в силовых масляных трансформаторах выполняет функцию
1) изоляции обмоток и охлаждающей среды.
55. В машинах постоянного тока отличие воздействия МДС дополнительных полюсов от воздействия МДС компенсационных обмоток состоит в
1) компенсации поперечной составляющей реакции якоря в пределах полюсной дуги машины.
56. Зависимость i а = f ( t ) машины постоянного тока, приведенная на рисунке, соответствует
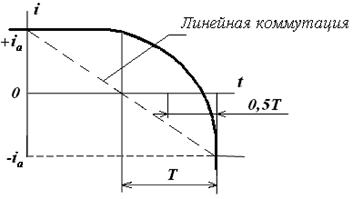
1) замедленной коммутации;
57. Назначение конденсаторов в однофазных асинхронных двигателях –
1) получение вращающегося магнитного поля.
58. Шум трансформаторов обусловлен
59. Преобразование энергии в автотрансформаторах происходит:
1) электромагнитным и электрическим.
60. В двухскоростных однообмоточных асинхронных двигателях изменение частоты вращения обеспечивается:
1) изменением числа полюсов;
61. Уменьшение тока холостого хода асинхронного двигателя с коротко замкнутым ротором при сохранении постоянного момента достигается
1) уменьшением величины воздушного зазора между ротором и статором.
УСТАНОВИТЕ СООТВЕТСТВИЕ
62. Установите соответствие между режимом работы синхронного двигателя и потребляемым током
Режим работы синхронного двигателя
1) режим перевозбуждения
б) опережающий ток
2) режим недовозбуждения
в) отсекающий ток
УСТАНОВИТЕ правильную последовательность
63. Асинхронный пуск явнополюсного синхронного двигателя производится (выполняется) в следующей последовательности:
1. обмотка возбуждения ротора замыкается на разрядное сопротивление
2. обмотка статора двигателя подключается к сети
3. шунтируется (выключается) разрядное сопротивление в цепи обмотки воз буждения
4. подается напряжение в обмотку возбуждения
64. Пуск двигателя постоянного тока параллельного возбуждения произво дится в следующей последовательности:
1. вводится полностью реостат в цепи якоря
2. уменьшается сопротивление реостата в цепи обмотки возбуждения до ми нимума
3. подается напряжение питания к двигателю
4. постепенно выводится (уменьшается) сопротивление в цепи якоря
65. Пуск асинхронного двигателя с фазным ротором и вывод его на естественную механическую характеристику производится в следующей последо вательности:
1. вводятся все ступени пускорегулирующих сопротивлений в цепи об
мотки ротора
2. подключаются к сети фазные обмотки статора
3. уменьшается количество ступеней пускорегулирующих сопротивле ний, включенных через контактные кольца в цепь обмотки ротора с
помощью коммутирующего аппарата
4. поднимаются щетки от контактных колец после закорачивания всех
колец с помощью специального устройства
66. Воздействие поля тока статора синхронных генераторов на поле возбуждения ротора называется реакцией якоря
67. Отношение разности синхронной скорости вращения магнитного поля и скорости вращения ротора к скорости поля в асинхронных двигателях назы вается скольжением
68. Электрическая машина переменного тока с разными скоростями вращения магнитного поля статора и ротора называется
асинхронным двигателем
69. Трансформатор, у которого количество витков первичной обмотки мень ше, чем количество витков вторичной обмотки, называется
повышающим
70. Сердечники электрических машин и трансформаторов выполняют ших тованными из пластин электротехнической стали для уменьшения величи ны потерь на вихревые токи
Таблица ответов по дисциплине «Электрические машины и аппараты»
Ответы к заданиям с одним правильным ответом
Регулирование скорости вращения электродвигателя постоянного тока
Для получения высокой производительности и требуемой точности или шероховатости обработки изделий, остановки исполнительного органа производственной машины в нужном месте с заданной степенью точности и т.д. приходится принудительно изменять частоту вращения или скорость линейного перемещения исполнительного органа. Принудительное изменение частоты вращения или линейного перемещения исполнительного органа производственной машины в соответствии с требованием производственного процесса называется регулированием скорости.
В настоящее время взамен коробок скоростей, вариаторов и т.п. все больше применяется электрическое регулирование частоты вращения, в основе которого лежит использование искусственных, механических характеристик электродвигателей. Электрическое регулирование частоты вращения приводит к упрощению, облегчению и удешевлению механической части машин и механизмов, упрощению управления, возможности получения плавного регулирования частоты вращения в широком диапазоне.
При питании двигателей от источника постоянного напряжения частоту вращения можно регулировать следующим образом: 1) изменением сопротивления цепи якоря; 2) изменением значения магнитного потока.
Естественно, что второй метод регулирования применим лишь к двигателям параллельного и смешанного возбуждения.
Для регулирования частоты вращения путем изменения сопротивления цепи якоря обычно используют тот же реостат, что и для пуска двигателя. Реостат, используемый как для пуска, так и для регулирования частоты вращения, находится в отношении нагревания в более тяжелых условиях, чем реостат, служащий только для пуска.
Рассматриваемый способ регулирования частоты вращения не требует сложного оборудования и дает возможность получить любую пониженную частоту вращения при заданной нагрузке. Однако он имеет и существенные недостатки. Одними из из них являются «мягкие» искусственные механические характеристики, благодаря чему частота вращения при данном сопротивлении сильно зависит от нагрузки двигателя. «Мягкие» характеристики затрудняют получение требуемых, особенно низких частот вращения при различных нагрузках. Другой недостаток заключается в том, что регулирование частоты вращения сопровождается потерями мощности в реостате, которые возрастают по мере увеличения сопротивления r и снижения частоты вращения.
Умножив правую и левую части уравнения на ток якоря, получим уравнение баланса мощности цепи якоря
где UIя — мощность, потребляемая из сети; ЕIя— электромагнитная мощность, т.е. мощность, преобразуемая электродвигателем из электрической в механическую; Iя 2 (rя + r) — потери мощности в сопротивлениях цепи якоря.
Рис. 1. Электромеханическая характеристика nе(I) и зависимость М(I) (а); механические характеристики n(М) двигателя последовательного возбуждения
Так как при работе двигателя с М = Мс = const ток якоря не зависит от сопротивления в цепи якоря, то при увеличении последнего мощность UIя остается постоянной. Происходит лишь ее перераспределение: с увеличением сопротивления снижением частоты вращения электромагнитная мощность уменьшается, а потери мощности возрастают.
При n→ 0 ЕIя→ 0, а I 2 (rя + r) → UIя. Значительные потери мощности в цепи якоря приводят к снижению КПД установки.
Искусственная механическая характеристика nn(М) приведена на рис.1б. Для регулирования частоты вращения двигателей параллельного и смешанного возбуждения путем изменения магнитного потока в цепь шунтовой обмотки включают реостат rр. Изменение сопротивления последнего приводит к изменению тока Iв и, следовательно, магнитного потока. При регулировании частоты вращения указанным методом резистор rиз цепи якоря обычно выключают.
Рассмотрим более подробно данный метод применительно к двигателю параллельного возбуждения.
Чтобы можно было составить представление о характере изменения частоты вращения, на рис. 2 приведены зависимости n(Ф).
Как видно, при работе двигателя вхолостую (M1 = Mcl = 0) с уменьшением магнитного потока частота вращения возрастает и при Ф → 0 n → ∞. Если же двигатель нагружен (М = Мс ≠ 0), то при уменьшении магнитного потока частота вращения сначала возрастает, а затем, достигнув максимального значения, уменьшается. Одна и та же частота вращения в случае М = Мс ≠ 0 может быть получена при двух различных значениях магнитного потока. Однако рабочей областью, в которой обычно производится регулирование частоты вращения, является область, соответствующая большим магнитным потокам, где с уменьшением потока частота вращения возрастает.
На основании выражения М = kM·Ф·Iя можно также сделать важный вывод о том, что при М = Мс = const и уменьшении магнитного потока ток Iя возрастет. Это необходимо учитывать при выборе мощности двигателя.
Механические характеристики двигателя параллельного возбуждения n(М) при различных значениях магнитного потока прямолинейны; меньшим значениям магнитных потоков соответствуют большие частоты вращения и более «мягкие» механические характеристики (рис. 3). Например, установив потоки Ф1, Ф2 и Ф3, получим при моменте сопротивления Мс частоты вращения п1, п2 и п3.
Рис. 2. Зависимости n(Ф) двигателя параллельного возбуждения при различных моментах
Рис. 3. Механические характеристики двигателя параллельного возбуждения при различных магнитных потоках
Переход от одной механической характеристики к другой происходит не при постоянной частоте вращения, а в соответствии с так называемой динамической характеристикой n(М), показанной на рис. 3 пунктиром. Это объясняется значительной индуктивностью обмотки возбуждения, из-за которой изменение магнитного потока происходит не мгновенно, а постепенно, одновременно с увеличением частоты вращения.
Одним из достоинств рассмотренного способа регулирования частоты вращения является его экономичность, так как дополнительные потери мощности в регулировочном реостате rр невелики. К достоинствам следует отнести также достаточно «жесткие» механические характеристики, что облегчает получение нужных частот вращения при различных нагрузках.
Серьезным недостатком следует считать то, что регулирование частоты вращения путем изменения магнитного потока можно производить лишь в области вверх от естественной механической характеристики.
Серьезным недостатком регулирования частоты вращения путем изменения сопротивления в цепи якоря при обычных схемах включения двигателей является сложность получения при различных нагрузках пониженных частот вращения из-за слишком «мягких» механических характеристик.
Для устранения этого недостатка находят применение различные другие способы получения искусственных механических характеристик, отличающихся большей «жесткостью».
Например, довольно часто применяется потенциометрическое включение двигателей, при котором якорь двигателя подключается к делителю напряжения (потенциометру), с помощью которого можно получать пониженные напряжения на выводах якоря и как следствие — пониженные частоты его вращения при достаточно «жестких» механических характеристиках. Следует заметить, что с увеличением нагрузки напряжение якоря при потенциометрическом включении снижается, а это приводит к уменьшению «жесткости» характеристик.
В случаях особо высоких требований к «жесткости» механических характеристик находят применение различные варианты систем с регулируемым напряжением, подводимым к якорю двигателя.
Простейшая схема одного из вариантов такой системы (системы генератор — двигатель, Г — Д) приведена на рис.4. В этой системе якорь двигателя ЯД независимого возбуждения соединен с якорем генератора ЯГ независимого возбуждения, который приводится во вращение приводным двигателем ДП Обмотки возбуждения двигателя ОВД и генератора OBГ получают питание от постороннего источника постоянного тока через реостат r1 и потенциометр r2.
Рис. 4. Схема простейшей системы генератор — двигатель
Рис.5. Механические характеристики двигателя в системе генератор — двигатель
Перед пуском двигателя необходимо установить движки реостата r1 и потенциометра r2 в положения, указанные на рис. 4, и произвести пуск двигателя ДП. При этом МДС обмотки ОВД создает наибольший магнитный поток Фд двигателя, а магнитный поток Фг генератора и, следовательно, его ЭДС Ег равны нулю. Очевидно, при этом якорь двигателя ЯД останется в покое.
Для пуска двигателя следует переместить движок потенциометра r2 из указанного положения, например, влево. Тогда возникает ток Iв,г, МДС обмотки ОВГ создает магнитный поток Фг генератора, появляются ЭДС E1 и ток Iя. Благодаря взаимодействию тока Iя и магнитного потока Фд двигателя якорь последнего ЯД приходит во вращение.
Уравнение механической характеристики n(М) двигателя в системе Г — Д имеет вид
| n = | Ег | — | М (rг + rд) | = n0— Δn. |
| keдФд | keдkMдФд 2 |
Как видно, механическая характеристика n(М) представляет собой прямую линию. Вследствие небольшого суммарного сопротивления rг + rд механическая характеристика получается достаточно жесткой.
Регулирование частоты вращения двигателя можно производить двумя способами:
- изменением ЭДС генератора Ег при Фд = const;
- изменением магнитного потока Фд двигателя при Eг = const.
Из уравнения следует, что при уменьшении ЭДС генератора с помощью потенциометра r2 будет изменяться только первый член уравнения, определяющий частоту вращения холостого хода n0. Второй член уравнения Δn, которым определяется изменение частоты вращения, вызванное нагрузкой, будет оставаться неизменным. Таким образом, механические характеристики при различных значениях ЭДС генератора представляют собой семейство параллельных линий (рис. 5) и, например, при моменте Мс оказывается возможным получить частоты вращения n1, n2, n3 и n4.
Кроме широкого диапазона регулирования частоты вращения система Г — Д имеет ряд других достоинств. Одно из них состоит в том, что управление двигателем осуществляется путем воздействия на цепи обмоток возбуждения, мощности которых относительно невелики.
Если переместить движок потенциометра из указанного положения вправо, изменится направление тока Iв,г , ЭДС Eг и в итоге — напряжение вращения электродвигателя.
Используя для питания обмотки возбуждения генератора какой-либо регулируемый суммирующий усилитель (например, электромашинный, магнитный или электронный) и применив в системе обратные связи, можно дополнительно повысить жесткость механических характеристик и изменять их конфигурацию.
К основным недостаткам системы Г — Д следует отнести большое число машин, сравнительно низкий КПД, значительные габаритные размеры и высокую стоимость.
С развитием полупроводниковой техники оказалось возможным избавиться от недостатков, присущих системе Г — Д, путем использования вместо генератора с приводным двигателем полупроводникового (тиристорного) преобразователя переменного тока в постоянный с регулируемым напряжением. В системах с тиристорным преобразователем можно получить характеристики, аналогичные характеристикам систем Г — Д.
2.11 Пуск в ход электродвигателей постоянного тока
Для пуска двигателей постоянного тока могут быть применены три способа:
1) прямой пуск, при котором обмотка якоря подключена непосредственно к сети;
2) реостатный пуск с помощью пускового реостата, включаемого в цепь якоря для ограничения тока при пуске;
3) пуск путем плавного повышения напряжения, подаваемого на обмотку якоря.
Прямой пуск. Обычно в двигателях постоянного тока падение напряжения Iном∑r во внутреннем сопротивлении цепи якоря составляет 5–10% от Uном, поэтому при прямом пуске ток якоря Iп = Uном/∑r = (10 ÷ 20) Iном, что создает опасность поломки вала машины и вызывает сильное искрение под щетками. По этой причине прямой пуск применяют в основном для двигателей малой мощности (до нескольких сотен ватт), в которых сопротивление ∑r относительно велико, и лишь в отдельных случаях–для двигателей с последовательным возбуждением мощностью в несколько киловатт. При прямом пуске таких двигателей Iп = (4 ÷ 6) Iном.
Переходный процесс изменения частоты вращения n и тока якоря ia в процессе пуска определяется нагрузкой двигателя и его электромеханической постоянной времени Тм. Для установления характера изменения n и ia при пуске двигателя с параллельным возбуждением будем исходить из уравнений:

; (2.82а)

, (2.82б)
где J – момент инерции вращающихся масс электродвигателя и сочлененного с ним производственного механизма; Мн–тормозной момент, создаваемый нагрузкой.
Из (2.82б) определяем ток якоря

. (2.83)
Подставляя его значение в (2.82а), получаем

(2.84а)

, (2.84б)

U где – частота вращения при идеальном холостом ходе;

уменьшение частоты вращения при переходе

от холостого хода к нагрузке; nн = n0 – Δnн–установившаяся частота вращения при нагрузке двигателя; – электромеханическая постоянная времени, определяющая скорость протекания переходного процесса.
При этом Iн = Мн/(смФ) – установившийся ток якоря после окончания процесса пуска, определяемый нагрузочным моментом Мн.
Решая уравнение (2.84б), получаем

. (2.85а)
Постоянную интегрирования А находим из начальных условий: при t = 0; n = 0 и А = – nн. В результате имеем

. (2.85б)

Рис. 2.65 – Переходный процесс изменения частоты вращения и тока якоря при прямом пуске двигателя постоянного тока
Зависимость тока якоря от времени при пуске двигателя определяется из (2.83). Подставляя в него значение

, (2.85в)
полученное из (2.846) и (2.856), и заменяя nн = n0 – Δn, имеем

. (2.86а)
Учитывая значение Δnн, n0, Тм и Мн/смФ, получим

, (2.86б)
где Iнач = U/∑r – начальный пусковой ток.
На рис. 2.65 приведены зависимости изменения тока якоря и частоты вращения (в относительных единицах) при прямом пуске двигателя с параллельным возбуждением. Время переходного процесса при пуске принимается равным (3–4) Тм. За это время частота вращения n достигает (0,95 – 0,98) от установившегося значения nн, а ток якоря Iа также приближается к установившемуся значению.
Реостатный пуск. Этот способ получил наибольшее распространение. В начальный момент пуска при n = 0 ток Iп = U/(∑r + rп). Максимальное сопротивление пускового реостата rп подбирается так, чтобы для машин большой и средней мощностей ток якоря при пуске Iп = (1,4 ÷ 1,8) Iном, а для машин малой мощности Iп = (2 ÷ 2,5) Iном. Рассмотрим процесс реостатного пуска на примере двигателя с параллельным возбуждением. В начальный период пуск осуществляется по реостатной характеристике 6 (рис. 2.66, а), соответствующей максимальному значению сопротивления rп пускового реостата; при этом двигатель развивает максимальный пусковой момент Мп.макс.

Рис. 2.66 – Изменение частоты вращения и момента при реостатном пуске двигателей с параллельным и последовательным возбуждением
Регулировочный реостат rр.в в этом случае выводится так, чтобы ток возбуждения Iв и поток Ф были максимальными. По мере разгона момент двигателя уменьшается, так как с увеличением частоты вращения растет э. д. с. Е и уменьшается ток якоря Ia=(U – E)/(∑r +rп). При достижении некоторого значения Мп.мин часть сопротивления пускового реостата выводится, вследствие чего момент снова возрастает до Мп.макс. При этом двигатель переходит на работу по реостатной характеристике 5 и разгоняется до достижения Mп.мин. Таким образом, уменьшая постепенно сопротивление пускового реостата, осуществляют разгон двигателя по отдельным отрезкам реостатных характеристик 6,5,4,3 и 2 (см. жирные линии на рис. 2.66, а) до выхода на естественную характеристику 1. Средний вращающий момент при пуске Мп.ср = 0,5 (Мп.макс +Мп.мин) = const, вследствие чего двигатель разгоняется с некоторым постоянным ускорением. Таким же образом пускается в ход двигатель с последовательным возбуждением (рис. 2.66, б). Количество ступеней пускового реостата зависит от жесткости естественной характеристики и требований, предъявляемых к плавности пуска (допустимой разности Mп.макс – Мп.мин).
Пусковые реостаты рассчитывают на кратковременную работу под током.
На рис. 2.67 показаны зависимости тока якоря ia, электромагнитного момента М, момента нагрузки Мн и частоты вращения n при реостатном пуске двигателя (упрощенные диаграммы).

Рис. 2.67 – Переходный процесс изменения частоты вращения, момента и тока якоря при реостатном пуске двигателя постоянного тока
При выводе отдельных ступеней пускового реостата ток якоря ia достигает некоторого максимального значения, а затем уменьшается согласно уравнению (2.85б) до минимального значения. При этом электромеханическая постоянная времени и начальный ток будут иметь различные для каждой ступени пускового реостата значения:
 ;
; 
В соответствии с изменением тока якоря изменяется и электромагнитный момент М. Частота вращения n изменяется согласно уравнению

, (2.86в)
где nнач–начальная частота вращения при работе на соответствующей ступени пускового реостата.
Заштрихованная на рис. 2.67 область соответствует значениям динамического момента Мдин = М – Мн, обеспечивающего разгон двигателя до установившейся частоты вращения.
Пуск путем плавного повышения питающего напряжения. При реостатном пуске возникают довольно значительные потери энергии в пусковом реостате. Этот недостаток можно устранить, если пуск двигателя осуществлять путем плавного повышения напряжения, подаваемого на его обмотку. Но для этого необходимо иметь отдельный источник постоянного тока с регулируемым напряжением (генератор или управляемый выпрямитель). Такой источник используют также для регулирования частоты вращения двигателя.