Позиционирование авиасимулятора
Гидравлические цилиндры позиционирования кабины авиасимулятора требуют быстрого и надежного измерения текущего положения штока для динамического управления. В комбинации с соответствующим клапаном, гидравлический цилиндр может быть преобразован в привод позиционирования, способный создавать высокие ускорения кабины авиасимулятора. Пропорциональные клапаны управляют потоком гидравлической жидкости. Индуктивные датчики в герметичном устойчивом к давлению корпусе до 400 бар используются для контроля положения цилиндров. Индуктивные датчики линейных перемещений (LVDT линейный переменный дифферениальный трансформатор), дают данные об абсолютном положении цилиндра и положении всей кабины авиасимулятора по соответствующей оси с высочайшей точностью и динамикой.

Авиасимулятор с гидравлическими приводами и контролем положения
Используются датчики гидравлической — HYD серии.
Технология индуктивных датчиков основывается на линейном переменном дифференциальном трансформаторе (LVDT) и предназначена для использования в жестких промышленных условиях. Благодаря компактной конструкции, датчики HYD серий могут полностью встраиваться в цилиндр.
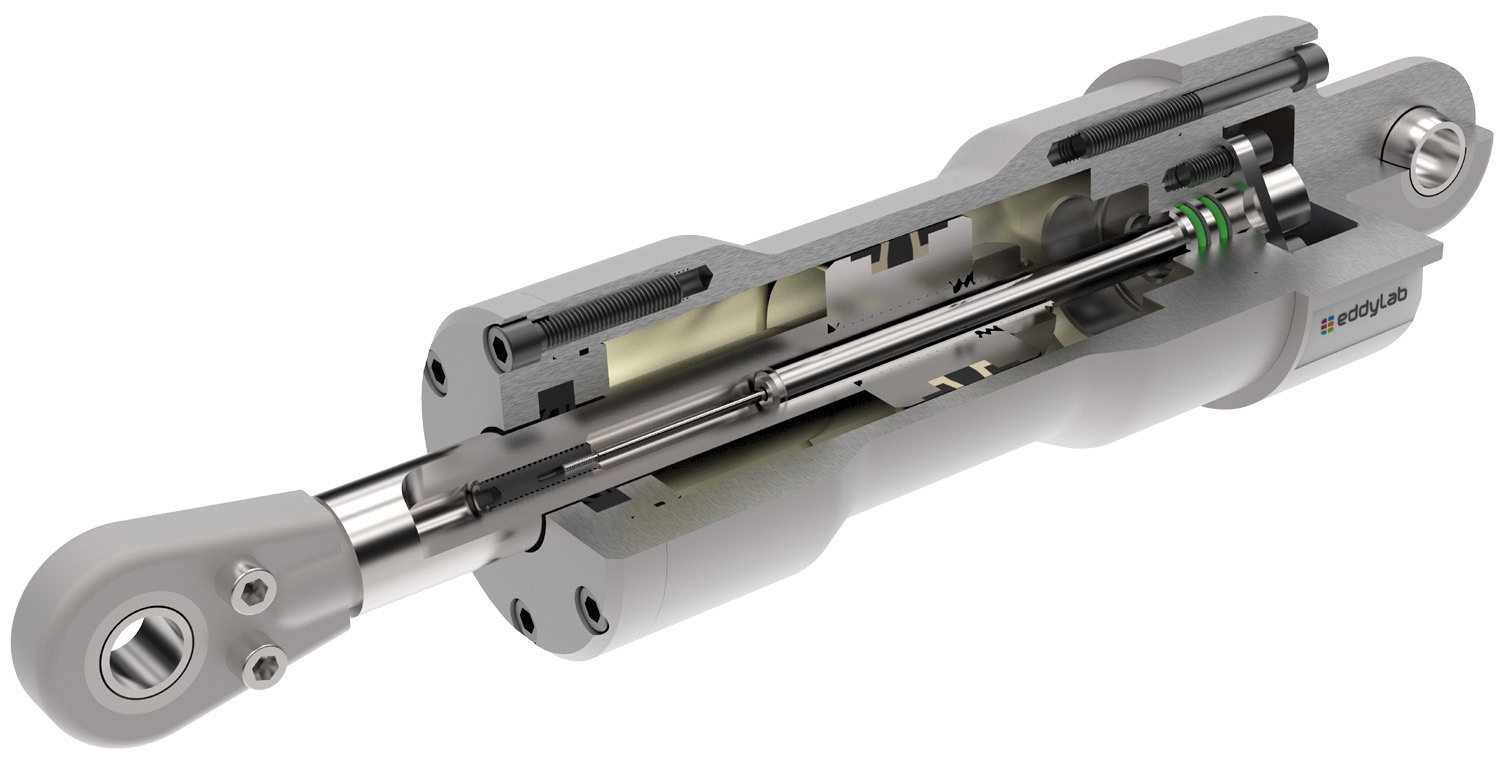
Разрез гидравлического цилиндра со встроенным индуктивным датчиком
Для этого корпус датчика привинчивается или зажимается в основании цилиндра. Поршень имеет отверстие для размещения корпуса датчика. Поршень соединяется со штоком датчика, перемещающимся внутри корпуса. По своей конструкции датчики LVDT являются одними из самых надежных и прочных датчиков. Бесконтактный принцип измерений обеспечивает отсутствие износа и гарантирует большой срок службы. Устройства могут выдерживать значительные удары и вибрации, которые могут присутствовать на динамических гидроцилиндрах, без повреждений. Только полностью залитая и инкапсулированная система катушек способна работать унутри корпуса под давлением. eddylab избегает чувствительных электронных компонентов в датчике и рекомендует их удаленную установку в шкафу автоматики или на кабеле.
Различные конструкции корпуса с резьбовым или фланцевым креплением, а также варианты с интегрированным кабелем или разъемом позволяют оптимально встроить датчик в цилиндр. Фланцевое крепление обеспечивает макисмальную простоту встраивания в головку цилиндра и монтажа. Кроме того, eddylab предлагает услуги по адаптации конструкции датчика в отношении диапазона, фланца, давления и других требований заказчика.
Контроль хода цилиндров литейных форм
Непрерывные литые профили изготавливаются сталелитейной промышленностью при помощи охлаждаемых форм. В формы наливается жидкая сталь. Сама форма изготавливается из меди или графита и имеет охлаждение. Чтобы жидкая сталь не прилипала к форме, в качестве прослойки используется литейный порошок. Сама форма подвергается вертикальной виборации с частотой около 10 Гц с перемещением несколько миллиметров при помощи гидравлических цилиндров. Это позволяет стали перемещаться в продольном направлении, охлаждаться и затвердевать до получения отливки. Окончательный литой профиль получается дальнейшим охлаждением и прокаткой или протяжкой для придания формы.

Производство непрерывных стальных литых профилей
Чтобы придать машине весом 25 тонн колебательного движения, требуются значительные усилия, которые создаются мощными гидравлическими цилиндрами. Регулировка хода цилиндров необходима для контроля результирующего горизонтального перемещения отливок. Индуктивный датчик (LVDT), встроенный в гидравлический цилиндр, дает точные данные по перемещению и передает сигнал на контроллер машины для регулировки хода цилиндров.
Условия эксплуатации подразумевают очень высокую температуру, удары и вибрацию. Встроенная в датчик электроника не способна работать в таких условиях. Предлагаемое eddylab решение состоит в использовании внешней электроники IMCA, позволяющей применить кабель длиной более 100 м между датчиком и электроникой, так что электроника может быть установлена в аппаратном зале рядом с системой управления оборудованием.
Используется защищенный от давления и температуры индуктивный датчик линейных переммещений (LVDT полный мост) серии RM-HYD, встраиваемый в цилиндр.
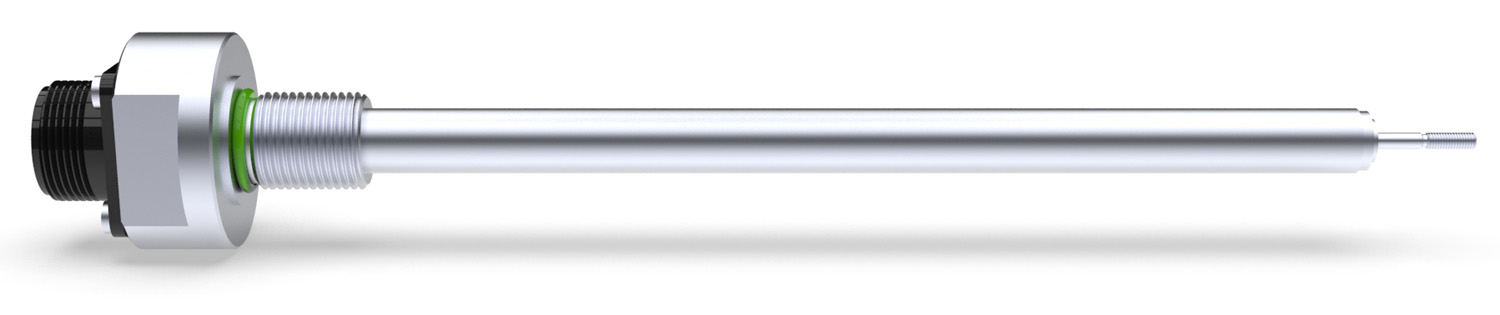
Индуктивный датчик перемещений для встраивания в цилиндры
Контроль герметичности баночек с йогуртом в процессе их заполнения
Гигиеническая чистота и стерильность играют значительную роль при производстве и расфасовке продуктов для безопасности продуктов. Молочные продукты, такие как йогурты, пудинги, кофейные молочные напитки, а также порошкообразные субстанции, такие как сухое молоко и мука, обычно расфасовываются по гигиеническим стандартам «предельной чистоты» и «асептически». Для достижения такой чистоты машины регулярно моются и чистятся горячим паром с частичным применением агрессивных химических средств. Эти меры предотвращают попадание бактерий и нежелательных пищевых остатков (взаимное загрязнение) в продукты. Все установленные на машине устройства также подвергаются чистке, чего требуют высокие стандарты чистоты продуктов.

Розлив йогурта перед запечатыванием стаканчиков
Как это работает:
Стаканчики для йогкрта автоматически устанавливаются в держательи перемещаются по машине конвейрной цепью. Стаканчик стерилизуется и заполняется продуктом. Затем стаканчик запечатывается путем наварки стерилизованной алюминиевой фольги в качестве крышки. Производитель машины должен гарантировать, что этот процесс выполняется с максимально возможным постоянством.
Надежность важна, чтобы количество дефектных продуктов на прилавках магазинов было минимальным во избежание потери доверия покупателей к продукту и бренду в целом. Поэтому в конце процесса упаковки выполняется проверка герметичности каждого запечатанного стаканчика в отдельности.
Алюминиевая крышка стаканчика нагревается пластиной, имеющей температуру 250°C. Пластина непосредственно соединена со штоком индуктивного датчика. Вследствие короткого нагрева воздуха, находящегося под крышкой он расширяется, а крышка выпучивается. Индуктивный датчик компании eddylab измеряет подъем нагревательной пластины непрерывно и с высокой точностью, надежно передавая сигнал в систему управления машиной. Если упаковка не герметична, нагретый воздух вытекает из-под крышки, крышка не выпучивается как надо, датчик показывает отсутствие расширения. В результате дефектный продукт отбраковывается.
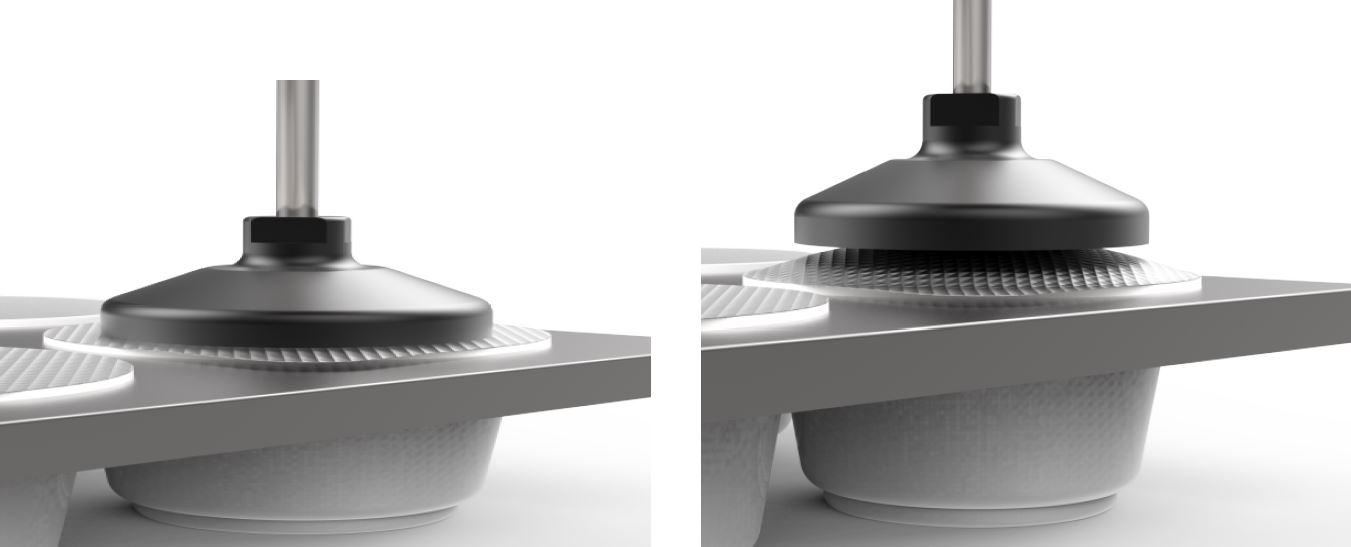
Подъем нагревательной пластины в процессе проверки герметичности
Датчики:
Датчики серии SLX специально разработаны для применения в пищевой, медицинской и фармацевтической промышленностии имеют повышенную стойкость и надежность.
- Корпус полностью из нержавеющей стали
- Высокая степень защиты ( IP68/IP69K)
- Специальный кабель и материал уплотнений
Заказные размеры датчика и различные конструктивные исполнения позволяют адаптировать датчики к условиям применения.
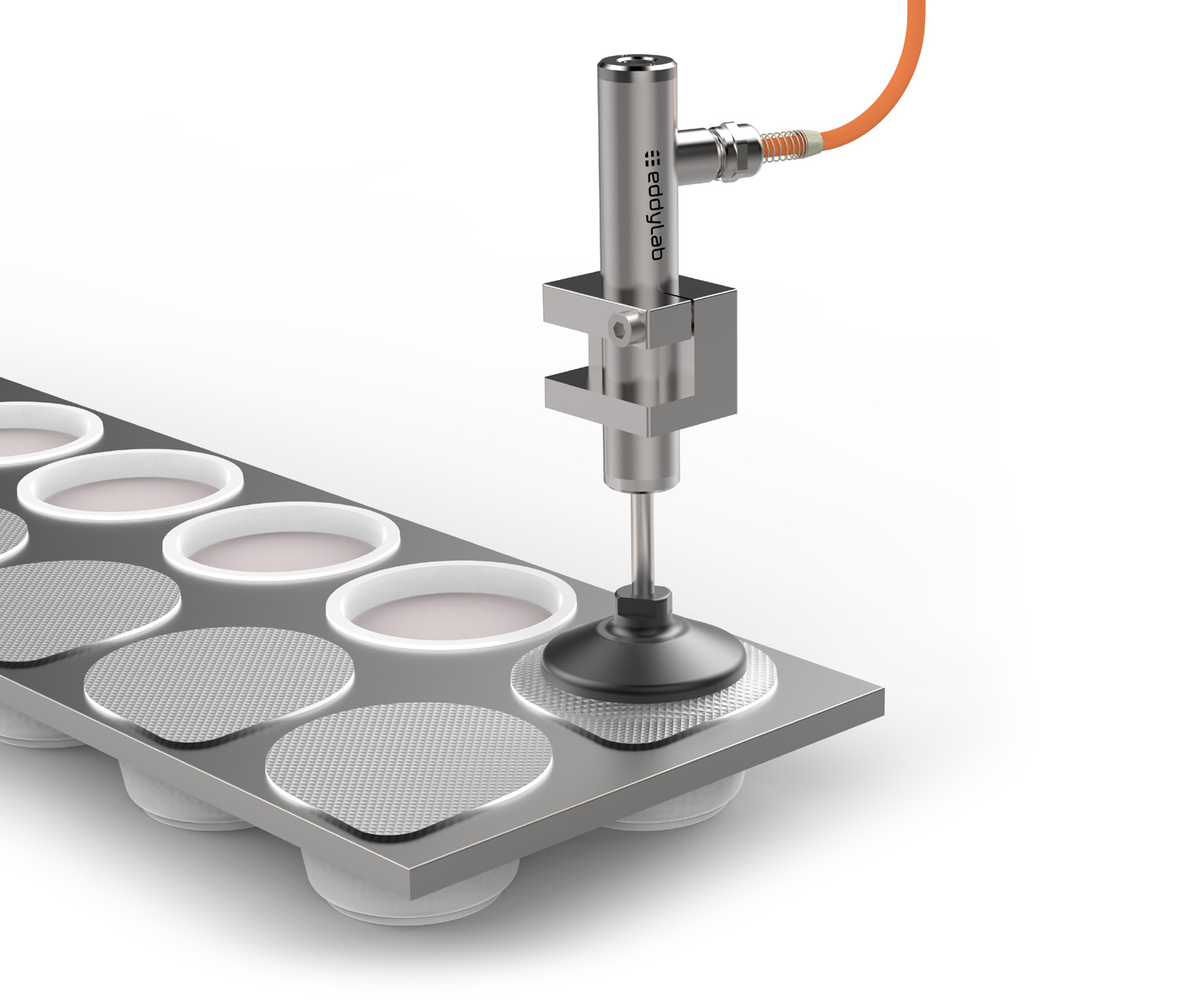
Индуктивный датчик с нагревательной пластиной для контроля герметичности
Преимущества:
- Надежная работа даже при изменении формата (размеров стаканчика), более не требуется «переналадка» как в случае с концевыми выключателями.
- Непрерывные измерения, не только конечное положение
- Гарантия оптимального качества продукции
- Повышение надежности процесса
- Сокращение простоев
- Простая установка датчика
- Не требуется техническое обслуживание
Мониторинг паропроводов
LOCA (утечка охладителя) описавает аварию с утечкой охлаждающей жидкости в реакторе, причина которой может заключаться в нарушении трубопроводной системы. В худшем случае, можно предположить, что оба конца трубы отрезаны и утечка происходит через двойное сечение трубопровода. Соответственно рассичтывается аварийная охлаждающая система и размер резервной емкости реактора. Дублирующие системы должны быть доступны, поврежденные трубопроводы должны быть перекрыты аварийными клапанами за короткий промежуток времени. Причины аварии могут быть разными, например, землетрясение, крушение самолета или цунами.
Другое возможное явление — это гидроудар, который может произойти в горячих паропроводах при конденсации части насыщенного пара и накопления в трубе из-за недостаточного дренирования, так что неожиданно на определенных участках трубы все поперечное сечение оказывается заполнено водой. Водяной столб ускоряется давлением пара, и происходит удар, похожий на работу поршня цилиндра. Последующие изгибы трубопровода представляют препятствие водяному столбу и его массовой инерции. Давление в сети трубопроводов быстро возрастает и в несколько раз превышает максимальное давление пара и может исчерпать запас проектный прочности трубопровода, приводя к деформации или разрыву трубы.
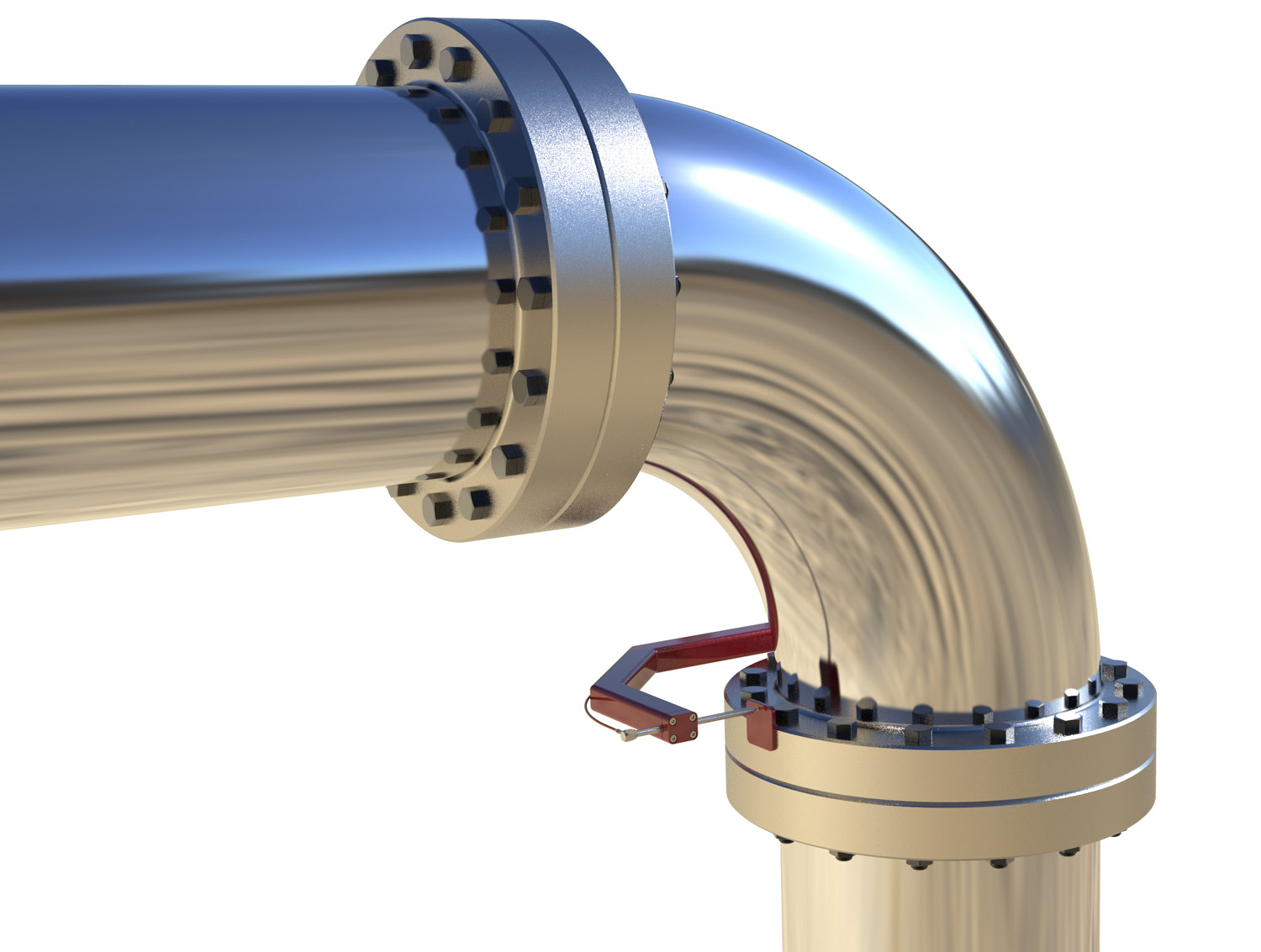
Мониторинг трубопроводов электростанций
В обоих авариях, LOCA (утечка охладителя) и гидроудар, важно постоянно контролировать важные для безопасности станции элементы, такие как трубопроводы охлаждения и паропроводы перегретого пара, а также, если необходимо, немедленно их перекрывать при помощи аварийных клапанов. Функции берут на себя дублирующие системы. Эффективное предохранительное устройство состоит из установленных датчиков перемещений трубопроводов, построенных по принципу полного индуктивного моста (LVDT). Индуктивный датчик перемещений передает данные о положении трубопровода в виде сигнала на пульт управления. Кроме того, низкочастотные вибрации трубопроводов могут служить сигналом о возможной аварии. Положение трубопроводов в нескольких различных точках отображается на пульте управления станции. Если результат измерений выходит за предварительно заданные пороговые значения с учетом возможных расчетных перемещений и амплитуды вибраций, подается сигнал тревоги и выполняется установленная аварийная процедура.
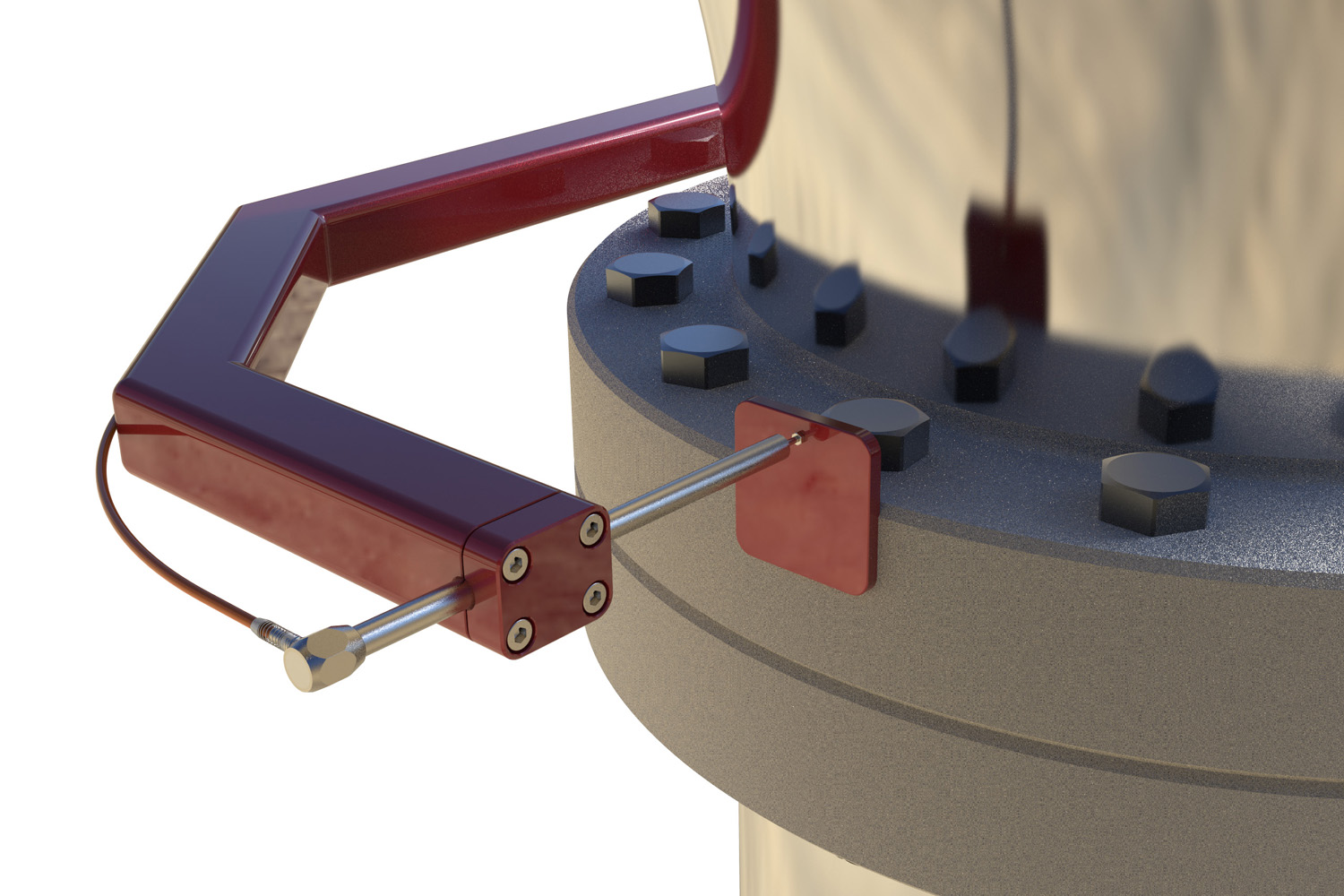
Установка индуктивного датчика линейных перемещений для мониторинга паропроводов (измерение положения трубы)
Используются диапазоны измерений индуктивных датчиков линейных перемещений от 100 до 300 мм. Сами датчики должны выдерживать экстремальные условия эксплуатации без ущерба, например, максимальную температуру 180°C, паро-воздушную смесь 100% (относительная влажность) и конденсат 0,5 кг/м³ при температуре 125°C. Датчики eddylab, предназначенные для этой задачи, состоят из цилиндрического корпуса и подвижного штока. Корпус крепится к неподвижной конструкции при помощи струбцин, шток соединяется с трубопроводом. Если паропровод движется вместе со штоком относительно корпуса датчика, выходной сигнал изменяется. Результаты мониторинга в виде непрерывного сигнала положения передаются в систему управления станции.
Внутри датчик состоит из системы катушек (первичная и вторичная) в герметичном корпусе с кольцевыми уплотнениями Viton. Электроника IMCA питает первичную катушку LVDT сигналом на несущей частоте 3 кГц и анализирует дифференциальное напряжение на вторичной катушке по амплитуде и фазе. Преимуществом данной системы является возможность использования длинного кабеля между датчиком и электроникой, так что электроника может находиться в безопасном месте на удалении 100 м и более, в то время как датчик может подвергаться экстремальным условиям на месте установки без проблем.
3. Дифференциальные (реверсивные) индуктивные датчики
Дифференциальные индуктивные датчики представляют собой совокупность двух одинарных (нереверсивных) датчиков с общим якорем. Предназначены дифференциальные индуктивные датчики для получения реверсивной статической характеристики и для компенсации электромагнитной силы притяжения якоря.

Рассмотрим работу дифференциального индуктивного датчика (рис. 3, а), состоящего из двух одинаковых сердечников 1 и 2 с обмотками и расположенного между сердечниками якоря 3, способного перемещаться влево и вправо относительно среднего симметричного положения. Питание дифференциального датчика осуществляется от трансформатора с выводом от средней точки вторичной обмотки. Сопротивление нагрузки RH включается между этой средней точкой и общей точкой обмоток сердечников 1 и 2. Ток в сопротивлении нагрузки можно представить как алгебраическую сумму двух токов: в левом и правом контурах. Каждый контур состоит из половины вторичной обмотки трансформатора, одинарного индуктивного датчика и сопротивления нагрузки RH, общего для обоих контуров. Рассмотрим направления контурных токов в момент времени, когда во вторичной обмотке трансформатора индуцируется условно положительный полупериод напряжения: плюс — у левого зажима; минус — у правого. Полярность средней точки относительно левого зажима будет минусовая, а относительно правого — плюсовая. Принимая за положительное направление тока во внешней цепи от плюса к минусу, определяем, что ток левого контура I1 направлен сверху вниз, а ток правого контура I2 — снизу вверх. Следовательно, эти токи вычитаются, а через нагрузку пойдет разностный ток. В следующий полупериод полярность изменится на противоположную (на рис. 3 показана в скобках). Соответственно изменится направление токов в нагрузке, но опять ток в нагрузке будет равен разности токов I1 и I2 (направление их показано пунктиром). Очевидно, что каждый из этих контурных токов можно определить по формулам (11) или (13). При среднем (симметричном) положении якоря 3 индуктивности обмоток 1 и 2 одинаковы. Следовательно, токи I1 и I2 равны, разность их равна нулю, выходной сигнал (ток в сопротивлении нагрузки) равен нулю: .
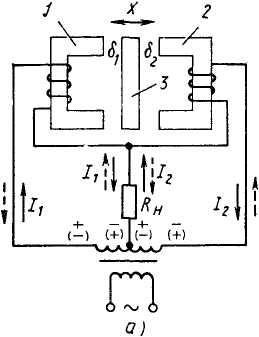

Рис. 3. Дифференциальный индуктивный датчик
При перемещении якоря вправо (примем его за положительный входной сигнал) индуктивность L2 возрастает, поскольку воздушный зазор в одинарном индуктивном датчике 2 уменьшается, а индуктивность L1 убывает, поскольку зазор в датчике 1 увеличивается. Следовательно, I1> I2 и появляется выходной сигнал в виде тока нагрузки определенной полярности. При перемещении якоря влево (отрицательный входной сигнал) соответственно уменьшается L2 и увеличивается L1 соотношение токов I1 I2 и полярность тока нагрузки изменяется. Поскольку речь идет о переменном синусоидальном токе, это означает, что фаза тока изменяется на 180°. Таким образом, статическая характеристика дифференциального датчика (рис. 3, б) будет реверсивной, зависящей от знака входного сигнала. А дифференциальным датчик называется потому, что выходной сигнал формируется как разность сигналов двух одинаковых датчиков.
Силы притяжения якоря к сердечникам возникают и в этом случае, но направлены они в противоположные стороны и поэтому почти полностью взаимно компенсируются. Поэтому для перемещения якоря требуется незначительное усилие. Очень важной особенностью дифференциального датчика является равенство нулю выходного сигнала при нулевом входном сигнале. Напомним, что в одинарном датчике выходной сигнал (ток через обмотку) был не равен нулю даже при нулевом воздушном зазоре.
Для получения реверсивной статической характеристики используют и мостовую схему включения индуктивных датчиков (рис. 4, а, б). Плечи моста образованы обмотками двух сердечников 1 и 2 с индуктивностями соответственно L1 и L2 и двумя постоянными резисторами с сопротивлением R. К одной диагонали моста подводится напряжение питания U0 переменного тока, со второй диагонали снимается выходное напряжение Uвых. Если якорь 3 занимает среднее положение, то индуктивности L1 и L2 одинаковы и мост сбалансирован. Выходное напряжение Uвых при этом равно нулю. При отклонении якоря от среднего положения баланс моста нарушается, так как индуктивность одной обмотки увеличивается, а другой — уменьшается. Изменение направления перемещения якоря вызывает изменение фазы выходного напряжения на 180°, т. е. характеристика мостовой схемы индуктивных датчиков является реверсивной (см. рис. 3, б).


Рис. 4. Мостовая схема реверсивного индуктивного датчика
Оценим чувствительность датчика в мостовой схеме. Сначала преобразуем уравнение (12) для индуктивности:


где  — относительное перемещение якоря,
— относительное перемещение якоря, — индуктивность датчика при среднем положении якоря, когда якорь3 находится на одинаковом расстоянии от сердечников 1 и 2, равном δ0. Уравнение для помножим и поделим на (1 — σ):
— индуктивность датчика при среднем положении якоря, когда якорь3 находится на одинаковом расстоянии от сердечников 1 и 2, равном δ0. Уравнение для помножим и поделим на (1 — σ):
Уравнение для L2 помножим и поделим на (1 + σ):

Чувствительность оценивается при малых входных сигналах, когда х δ0 и σ < 1. Поэтому  и
и  в знаменателе можно пренебречь. В первом приближении для малых входных сигналов принимаем
в знаменателе можно пренебречь. В первом приближении для малых входных сигналов принимаем
 ;
;  (21)
(21)
Полагая, что мост не нагружен, для установившегося режима можно записать выражение для выходного напряжения схемы:

(22)
Формулу (22) можно упростить в предположении, что активные сопротивления обмоток (R1, R2) значительно меньше их индуктивных сопротивлений (ω L1, ω L2).

Подставляя в (22) значения индуктивностей L1 и L2, определяемых выражением (21), получим для малых отклонений
(23)
Модуль выражения (23) определяет амплитуду выходного напряжения, а аргумент — фазу.
Амплитуда выходного напряжения

Чувствительность (или коэффициент преобразования) датчика определяется как производная выходного напряжения по перемещению при х = 0:

(24)
Повысить чувствительность можно увеличением напряжения питания и снижением величины начального воздушного зазора, т. е. сближением сердечников 1 и 2.
Питание индуктивных датчиков всегда осуществляется переменным током, но с помощью выпрямительных схем выходной ток может быть и постоянным. Для того чтобы иметь реверсивную характеристику, используют фазочувствительный выпрямитель. Схема реверсивного индуктивного датчика с выходным постоянным током показана на рис. 5. Сердечники на схеме показаны Ш-образной формы. Такие сердечники используются чаще, чем П-образные, показанные на предыдущих рисунках, хотя принцип действия одинаков для датчиков с сердечниками разной формы. Выходной сигнал датчика снимается с помощью измерительного трансформатора 1 и подается на одну диагональ выпрямительного моста 3. Опорное напряжение снимается с трансформатора 2 и подается на другую диагональ моста 3. Нагрузка Rн включается между средними точками вторичных обмоток трансформаторов 1 и 2. При фазочувствительном выпрямлении изменение фазы сигнала на 180° приводит к изменению полярности выпрямленного напряжения.

Рис. 5. Схема включения реверсивного индуктивного датчика с выходным постоянным током
Следует отметить, что при неидентичности одинарных индуктивных датчиков, используемых в дифференциальной или мостовой схемах, возникает остаточное напряжение даже в среднем положении якоря. Это остаточное напряжение сдвинуто по фазе относительно напряжения питания, определяющего фазу полезного сигнала. Следовательно, остаточное напряжение может быть разложено на две составляющие. Одна составляющая, совпадающая по фазе с полезным сигналом, называется синфазной. Другая составляющая, сдвинутая по фазе на 90° относительно полезного сигнала, называется квадратурной. Остаточное напряжение является напряжением погрешности, и поэтому желательно его скомпенсировать. Синфазную составляющую остаточного напряжения можно скомпенсировать соответствующим перемещением якоря от среднего положения. Одновременно скомпенсировать и синфазное и квадратурное напряжения погрешности таким способом нельзя. Для подавления квадратурной составляющей могут быть использованы фазочувствительные выпрямители, обладающие свойством не пропускать сигналы, сдвинутые по фазе на 90° относительно опорного напряжения.
Реверсивные индуктивные датчики с сердечниками Ш- и П-образной формы используются для измерения довольно малых перемещений; они имеют начальный зазор порядка 0,3—1 мм.
Для измерения больших перемещений применяют индуктивные датчики в виде катушки с подвижным внутренним сердечником. Если сердечник полностью введен внутри катушки, на которую намотана обмотка, то ее индуктивное сопротивление максимально, а ток в обмотке имеет минимальное значение. При выводе сердечника из катушки индуктивное сопротивление уменьшается, а ток соответственно увеличивается. Индуктивные датчики в виде катушки с перемещающимся внутри нее сердечником получили название плунжерных датчиков. Их также называют индуктивными датчиками с разомкнутым магнитопроводом, поскольку даже при максимальной индуктивности обмотки основной путь магнитного потока проходит по воздуху. С этой точки зрения рассмотренные выше датчики с обмоткой на неподвижном сердечнике и с перемещающимся якорем называют индуктивными датчиками с замкнутым магнитопроводом.

Рис. 6. Индуктивный датчик плунжерного типа
У плунжерных датчиков есть одна очень важная особенность: они позволяют получить информацию о перемещении из замкнутого, изолированного пространства. Пусть, например, надо измерить уровень какой-либо очень вредной жидкости, пары которой ядовиты, да еще находятся под большим давлением. Тогда катушку 1 плунжерного датчика (рис. 6) надевают на разделительную трубку 3 из нержавеющей немагнитной стали, внутри которой и перемещается сердечник 2 из ферромагнитного материала. Перемещение сердечника изменяет индуктивность катушки, а разделительная трубка не экранирует магнитное поле, поскольку материал трубки имеет очень малую магнитную проницаемость. Таким образом, обмотка датчика, все другие электрические элементы измерительной схемы размещены в обычных, нормальных условиях. В связи с этим про плунжерные датчики говорят, что они позволяют вывести перемещение из замкнутого объема. В этом основное преимущество плунжерных датчиков перед датчиками с замкнутым магнитопроводом. А вот по чувствительности, мощности выходного сигнала плунжерные датчики уступают индуктивным датчикам с замкнутым магнитопроводом.

Рис. 7. Индуктивный мост для дистанционной передачи линейных перемещений
С помощью плунжерных датчиков могут быть реализованы такие же дифференциальные и мостовые схемы, какие были рассмотрены выше (см. рис. 3, 4).

Рассмотрим в качестве примера использование плунжерных датчиков в схеме индуктивного моста (рис. 7). Обмотка каждого из двух датчиков А и Б имеет вывод от средней точки. Обмотки датчиков соединены друг с другом проводами линии связи. Напряжение питания приложено между средними точками обмоток. Каждая из половин обмоток образует плечо моста переменного тока. Датчик А установлен в передающем приборе, датчик Б — в приемном приборе. При перемещении сердечника датчика А изменяется индуктивное сопротивление каждой из половин его обмотки. Например, при перемещении сердечника вверх возрастает индуктивность LA1 и уменьшается индуктивность LA2. Баланс моста нарушается, и по проводам линии связи протекают токи разбаланса I1 и I2. Эти токи, протекая по обмотке датчика Б, вызывают электромагнитную силу, перемещающую сердечник датчика Б. Под действием этой силы сердечник датчика Б устанавливается в такое же положение, что и сердечник датчика А. При этом, естественно, происходит соответствующее изменение индуктивностей LБ1 и LБ2. Условием баланса моста является, как известно, равенство произведений сопротивлений противолежащих плеч моста или соответствующих индуктивностей: .
Схема индуктивного моста позволяет осуществить дистанционную передачу линейных перемещений. Однако усилие на приемной стороне весьма невелико. Например, выпускались приборы с катушками диаметром 65 мм, высотой 135 мм и массой 2,5 кг. При полном ходе в 30 мм обеспечивалось усилие в несколько сантиньютон на 1 % полного хода сердечника. Такого усилия достаточно лишь для перемещения стрелки в приемном приборе.
Для получения значительно больших усилий схема индуктивного моста используется совместно с усилителем и электродвигателем. Напряжение разбаланса моста ΔU снимается с измерительной диагонали моста и подается на вход усилителя, который питает электродвигатель, перемещающий (через редуктор) сердечник датчика Б до тех пор, пока не наступит баланс моста, т. е. ΔU = 0.
Тесты по Основы автоматики
4.Датчики одностороннего действия и потенциометрические датчики.
Тест. З. Что представляет собой жидкостной датчик?
1.Устройство для усиления тока.
2.Вакуумную или газонаполненную лампу.
3.Стеклянную трубку, внутри которой размещена стеклянная ампула с копиляром.
4.Конденсатор, емкость, которой от площади пластин.
4. Тест. Тригер представляет собой:
1. Электронную схему с релейными характеристиками.
2. Конструктивно дроссельный усилитель.
4. Устройство для усиления тока.
5.Что такое стабилизатор?
1 .Полупроводниковый усилитель.
2Устройство для измерения и контроля очень малых перемещений.
4.Прибор, который автоматически поддерживает какой либо параметр.
6. Шаговые искатели являются:
1. Электрическими и пневматическими включающими устройствами.
2. Электромагнитными и импульсные переключатели.
3.Электромагнитный искатель прямого действия.
4. Предназначендля переключения мощного сигнала.
7.Сколько состояний может принимать элемент релейной системы?
8.Что означает логическая функция «И»?
9. Что означает логическая функция «ИЛИ»?
З. Логическое отрицание.
10.Что означает логическая функция «НЕ»?
З. Логическое умножение.
11.Под знаком управления в автоматике понимают:
З. Биологическую зависимость.
12.Индуктивные датчики с перемещающимся сердечником способны измерять.
13.Сколько обмоток обычно имеют сельсины.
14.От чего зависит емкость в емкостных датчиках:
1.От длины пластин.
2.От площади пластин.
З. От ширины пластин.
4.От толщины пластин.
15. Многокаскадный фотоумножитель предназначен для:
2. Усиления мощности.
З. Понижение силы тока.
16. Датчик уровня — это устройство для измерения:
3.Уровня газов и веществ.
4.Уровней некоторых веществ.
17. Усилителем называется устройство, предназначенное для:
2.Увеличения мощности сигнала.
4. Увеличения тока.
18 — Тест. Из скольких отдельных сердечников выполнен магнитопровод магнитного усилителя:
19. Мультивибраторы представляют собой:
1. Резисторные устройства.
З. Транзисторные устройства.
4.Все выше перечисленные устройства.
20.К сопротивлениям первого типа относятся:
2.Лампы накаливания и бареттеры.
21. Компенсационные стабилизаторы могут быть выполнены на:
З. На ферритовом сердечнике.
4.Лампах и полупроводниках.
22.Статическая характеристика объекта представляет собой:
1 Зависимость управления величины у.
2.3ависимость управления величины х.
3.Зависимость управления величины R.
4.Зависимость управления величины n.
23.Аккумулирующая способность, т. е. способность объекта:
3.Накапливать и увеличивать энергию.
4.Все выше перечисленные ответы.
24.Постоянная времени объекта — это:
1.Время его разгона.
2Время его торможения.
З. Время его разгона и торможения.
4. Скорость времени.
25. У правлением называется:
1.Предномеренное воздействие на управляемый объект.
2.Воздействие на автоматическую систему регулирования.
З. Измеряющее значение величины.
26.Принципиальные схемы служат:
2.Основанием для разработки конструктивных документов.
3.Основанием для документов и наглядности.
27.Чем отличается трансформатор от автотрансформатора:
3.Наличием электрической связи.
28.Фотоэлементы с внешним фотоэффектом представляют собой:
1.Вакуумную или газонаполненную лампу.
2.Лампу без вакуума и газа.
3.Лампу с вакуумом но без газа.
4.Капсюль с газом.
29. Электроконтактный датчик является датчиком какого действия?
30.Платиновые и медные термометры сопротивления при ОС могут иметь номинальное сопротивление:
З. Платиновые-10.46,53,100 Ом.
31. Индуктивные датчики отличаются от трансформаторных датчиков:
1. Изменением индуктивности под влиянием входной величины
2. Наличием скользящего контакта
3. Отсутствием гальванической связи между цепями питания и выхода
4. Ничем не отличаются
32. Характерными особенностями термисторов являются:
1. Значительно большее удельное сопротивление, чем у металлов
2. Отрицательный температурный коэффициент
3. Высокая чувствительность к изменениям температуры
4. Все выше перечисленные
33. К каким датчикам относятся термоэлектрические преобразователи:
1. Электрическим усилителям
3. Электрокасательным усилителям
34. Зависимость сопротивления от температуры определяется:
1. Температурным коэффициентом
2. Химической устойчивостью
3. Градировочной характеристикой
4. Всеми перечисленными свойствами
35. Термисторы отличаются от позисторов:
1. Материалом изготовления
2. Маркой обозначения
3. Температурным коэффициентом
4. Всеми перечисленными
Индуктивные первичные преобразователи
Индуктивные преобразователи применяют для преобразования малых линейных или угловых перемещений в электрические сигналы. Принцип их действия основан на зависимости индуктивного сопротивления катушки от изменения зазора в магнитопроводе, от перемещения магнитопровода в катушке или от изменения площади зазора.
Индуктивный преобразователь с подвижным якорем (изменяющимся зазором) представляет собой катушку индуктивности 3 с магнитопроводом 2 и подвижным якорем 1 (рис. 4.4, а). Катушка индуктивности с магнитопроводом, называемая статором, закрепляется неподвижно, а якорь механически соединяется с подвижной частью объекта управления, перемещение которого необходимо преобразовать в электрический сигнал. Перемещение якоря изменяет воздушный зазор б (входная величина преобразователя), вызывает изменение индуктивного сопротивления катушки и, как следствие этого, выходной величины тока /при постоянном напряжении Uo.
Чувствительность индуктивных преобразователей с изменяющимся воздушным зазором уменьшается с увеличением зазора б, поэтому их используют для измерения и контроля очень малых перемещений (до 2 мм). В таком диапазоне рабочих перемещений их чувствительность не превышает 2 мкм.
Индуктивные преобразователи с перемещающимся магнитопроводом (рис. 4.4, б) способны измерять большие перемещения (до 50 мм).

Рис. 4.4. Индуктивные преобразователи:
а — с подвижным якорем; б—с перемещающимся сердечником; в — с изменяющейся площадью зазора; г — дифференциальный
У индуктивных преобразователей с изменяющейся площадью воздушного зазора (рис. 4.4, б) статическая характеристика линейна только на определенном участке. Линейность нарушает ся, когда активное сопротивление становится сравнимым с индуктивным. Диапазоны перемещения якоря больше (до 8 мм), чем у преобразователей с изменяющимся воздушным зазором, однако чувствительность ниже.
Все перечисленные выше виды индуктивных преобразователей обладают высокой надежностью, имеют практически неограниченный срок службы и большую мощность выходного сигнала (до нескольких ватт). К недостаткам можно отнести не-реверсивность статической характеристики, небольшой диапазон перемещения якоря, наличие тока холостого хода и влияние колебаний амплитуды и частоты напряжения питания. Эти недостатки практически полностью отсутствуют у дифференциальных индуктивных преобразователей.
Дифференциальный индуктивный преобразователь (рис. 4.4, г) имеет два статора 2 с катушками индуктивности 3 и один подвижный якорь 1. При отклонении якоря от среднего положения происходит изменение индуктивного сопротивления обеих катушек и на выходе преобразователя появляется напряжение UH. Катушки индуктивности включаются либо в дифференциальную измерительную схему, либо как смежные плечи мостовой измерительной схемы.
Дифференциальные индуктивные преобразователи по сравнению с ранее рассмотренными конструкциями обладают более высокой точностью и чувствительностью. Их статическая характеристика линейна и реверсивна. Поэтому они получили наибольшее распространение.
Трансформаторные преобразователи являются разновидностью индуктивных. Они представляют собой трансформаторы с переменным коэффициентом трансформации за счет изменения коэффициента взаимоиндуктивности между обмотками. Трансформаторные преобразователи применяют для преобразования небольших линейных и угловых перемещений в электрический сигнал (напряжение переменного тока).
Первичная обмотка 2 (рис. 4.5) дифференциального трансформаторного преобразователя с угловым перемещением якоря намотана на центральном стержне 1 магнитопровода, а две совершенно одинаковые вторичные обмотки 3 располагаются на крайних стержнях. Они соединены последовательно и имеют встречную намотку. При симметричном положении якоря 4 по отношению к стержню 1 во вторичных обмотках будут индуцироваться одинаковые по значению и противоположные по фазе ЭД С, а напряжение на выходе преобразователя будет равно нулю. При повороте якоря, механически связанного с подвижной частью объекта управления, изменяется значение магнитных потоков и в соответствии с этим значение ЭДС, т.е. на выходе появляется напряжение, амплитуда которого равна разности амплитуд ЭДС вторичных обмоток. Статическая характеристика рассмотренного преобразователя линейна и реверсивна. Реверсивность означает изменение в знаке выходного сигнала при изменении знака входного сигнала. Чувствительность преобразователя в 2 раза выше чувствительности обычных индуктивных преобразователей.
Интересна конструкция ферродинамического преобразователя, предназначенного для преобразования угловых перемещений в электрические сигналы.

Рис. 4.5. Дифференциальный трансформаторный преобразователь

Рис. 4.6. Ферродинамический преобразователь
Ферродинамический преобразователь (рис. 4.6) имеет магнитопровод, состоящий из плунжера 7, шихтованного ярма 2 и сердечника 3. На сердечнике 3 укреплены агатовые подпятники (на схеме не показаны), в которых на кернах установлена поворотная рамка 4, механически соединенная с подвижной частью объекта управления. Концы обмотки подвижной рамки подсоединяются с помощью спиральных пружин и проводов. Принцип работы преобразователя заключается в следующем. При подаче переменного тока на обмотку возбуждения 5 в магнитопроводе возникает магнитный поток. Если рамка 4 расположена по нейтрали ММ, то значение наведенной ЭД С равно нулю. При повороте рамки на некоторый угол в ней индуцируется ЭД С, величина которой пропорциональна углу поворота. Рабочий угол рамки от нейтрали составляет 40°. В зависимости от типа преобразователя напряжение на выходе рамки изменяется от —1 до +1 В или от 0 до 2 В.
Высокочастотные индуктивные преобразователи позволяют измерить толщину фольги металлов, толщину гальванических покрытий, разностенность металлических труб и т.д. Принцип их действия основан на изменении индуктивности обмотки при возникновении вихревых токов в проводящем теле, расположенном вблизи этой обмотки.
В таких преобразователях используется так называемый поверхностный эффект, т.е. затухание вихревых токов по мере проникновения их вглубь проводящей среды, обусловленных переменным магнитным полем; при этом разность токов возбуждающего поля и поля вихревых токов уменьшается.
К/икостные первичные преобразователи
Емкостные преобразователи преобразуют неэлектрические величины (перемещение, уровень жидкости, влажность, усилие и т.д.) в изменение электрической емкости. Емкостной преобразователь является частью регулирующего или измерительного устройства с чувствительным элементом, выполненного в виде конденсатора и реагирующего на изменение измеряемого параметра технологического процесса. Чувствительный элемент емкостного преобразователя представляет собой плоский или цилиндрический конденсатор, у которого при воздействии измеряемого параметра изменяется расстояние между пластинами, площадь пластин или диэлектрическая проницаемость среды между обкладками. Емкость конденсатора С возрастает с увеличением активной площади F и диэлектрической проницаемости ? (для воды ? = 81; для воздуха ? = 1; для формовочной смеси ? = 1 . 4) и уменьшается с увеличением расстояния между пластинами X, т.е. С = ?0?F/X, где ?0— диэлектрическая проницаемость вакуума, [ф/м]. Учитывая влияние перечисленных факторов на размеры чувствительного элемента, различают три типа емкостных преобразователей: с переменным расстоянием между пластинами, с изменяемой площадью пластин и изменяемой диэлектрической проницаемостью среды. Перечисленные параметры емкостных преобразователей являются входными величинами, а выходной величиной будет емкость конденсатора.

Рис. 4.7. Емкостные преобразователи:
а — с переменным расстоянием между пластинами; б — с изменяемой площадью цилиндрический; в — с изменяемой площадью плоский; г — с изменением диэлектрической постоянной; 5 — перемещение;
а — угол поворота пластин; h — высота уровня жидкости;
Н — высота пластин датчика


Емкостные преобразователи с переменным расстоянием между пластинами (рис. 4.7, а), как правило, конструктивно выполняют в виде плоского конденсатора, состоящего из двух или более пластин, одна из которых закреплена, а другая механически связана с подвижной частью объекта управления. Емкостные преобразователи этого типа применяют для измерения толщины изделий, а также используют для измерения давления, усилия или вибрации.
Емкостные преобразователи с изменяемой площадью пластин бывают как цилиндрическими (рис. 4.7, 6), так и плоскими (рис.
Цилиндрический емкостной преобразователь (рис. 4.7, б) представляет собой два цилиндра разного диаметра, помещаемых один в другой. Емкость конденсатора зависит от осевого перемещения 5 внутреннего цилиндра. Преобразователи этого типа предназначаются для измерения линейных перемещений.
В плоском преобразователе (рис. 4.7, в) емкость зависит от изменения активной площади пластин при повороте одной пластины относительно другой. Такие преобразователи используют при измерении угловых перемещений.
Емкостные преобразователи с изменением диэлектрической проницаемости среды между пластинами применяют для регулирования влажности формовочной смеси и дозирования воды при ее приготовлении. При колебании уровня жидкости изменяется емкость конденсатора (рис. 4.7, г), электродами которого служат корпус 1 и металлический стержень 2. Емкость такого преобразователя складывается из емкости цилиндрического конденсатора без жидкости и параллельно включенной емкости цилиндрического конденсатора с жидкостью. Емкость и чувствительность такого преобразователя увеличиваются с уменьшением отношения диаметров электродов, а также с ростом высоты цилиндра.
Емкостные преобразователи просты по устройству, обладают достаточно высокой чувствительностью, малыми размерами и массой. Однако они имеют три недостатка: мощность выходного сигнала мала, поэтому необходимо применять усилитель; при промышленной частоте электрического тока практически невозможно получить достаточную мощность, в связи с этим они получают питание от источника высокой частоты (10 кГц и более); сильное влияние оказывают паразитические емкости и посторонние электрические поля, поэтому требуется тщательное экранирование как самих датчиков, так и соединительных проводов.
В литейных цехах емкостные преобразователи находят применение для контроля уровня формовочной смеси в расходных бункерах при ее автоматической раздаче, для дозирования воды при приготовлении формовочной смеси в бегунах и т.д.
Тензометрические первичные преобразователи
Работа тензометрического преобразователя (тензорезистора) основана на изменении электрического сопротивления проводников при упругих деформациях растяжения или сжатия. Они применяются для преобразования деформаций, усилий и напряжений в электрический сигнал. В зависимости от конструкции и материала чувствительного элемента тензорезисторы подразделяются на проволочные, фольговые, полупроводниковые и тензолитовые.
Простейшим проволочным тензорезистором может служить отрезок тонкой проволоки. При деформации детали одновременно будет деформироваться и наклеенная проволока. Изменение электросопротивления ДА проволоки при ее растяжении или сжатии связано с относительной деформацией соотношением:
где А — номинальное сопротивление проволоки, Ом; к — коэффициент чувствительности.
Коэффициент чувствительности к зависит от вида материала и технологии изготовления преобразователя; его значение определяют экспериментально. Наибольшее распространение получили константан и нихром, для которых к= 1,94-2,1.
Размеры детали часто не позволяют закрепить на ней преобразователь в виде прямолинейного отрезка проволоки большой длины. Поэтому промышленность изготовляет тензометрические преобразователи в виде спирали (решетки) из нескольких петель проволоки (рис. 4.8, а). Проволоку 1 наклеивают на подложку 2 из тонкой бумаги или лаковой пленки и сверху наклеивают такую же тонкую бумагу. К проволоке приваривают (или припаивают) выводы 3, выполненные из тонких полосок медной фольги. Недостатком данной конструкции решетки является чувствительность преобразователя к поперечным деформациям. Для устранения этого недостатка петли между рядами заменяют медными перемычками 4(рис. 4.8, б). Основными параметрами решетки являются: длина / (3. 75 мм) ширина а (0,03. 10 мм) и радиус закругления г (0,1. 0,3 мм).

Рис. 4.8. Тензометрические преобразователи:
а — проволочные; б — с медными перемычками; в — фольговые
Проволочные тензорезисторы просты по конструкции, имеют малую массу и невысокую стоимость. Их статическая характеристика линейна и реверсивна. К недостаткам проволочных тензорезисторов относятся низкая чувствительность и одноразовость действия. Они подвержены влиянию окружающей среды (температура и влага).
Фольговые тензорезисторы по принципу действия и основным параметрам сходны с проволочными преобразователями и отличаются только конструкцией решетки (рис. 4.8, в) и способом ее получения. Для фольговых тензорезисторов применяется фольга толщиной 4. 12 мкм из константана, нихрома, титан-алюминиевого или золото-серебряного сплавов. Решетку фольговых тензодатчиков получают методом фотолитографии, который позволяет изготовлять преобразователи любой конструкции (линейные, розеточные, мембранные и т.п.) с высокой повторяемостью параметров. Фольговые тензорезисторы по сравнению с проволочными имеют ряд преимуществ. Они более чувствительны и точны за счет лучшей передачи деформации от детали к фольге, имеют хороший механический контакт с конт ролируемой деталью и позволяют пропускать через фолыу большой ток.
В настоящее время начинают находить применение полупроводниковые тензопреобразователи, изготовленные из полупроводниковых материалов — кремния, германия, мышьяка, галия и др. В отличие от проволочных и фольговых преобразователей изменение сопротивления при деформации у полупроводниковых происходит благодаря изменению удельного сопротивления.
Основным преимуществом полупроводниковых преобразователей является высокая чувствительность (почти в 100 раз выше, чем у проволочных). Они имеют большой выходной сигнал, что позволяет в некоторых случаях отказаться от применения усилителя. Однако у них большой разброс параметров и низкая механическая прочность, т.е. они хрупки.
Тензометрические преобразователи находят применение в машинах литья под давлением для определения давления металла в камере прессования, а также при контроле качества термической обработки.