Как работают промышленные роботы-манипуляторы
Сегодня для развития производств и их автоматизации используются промышленные роботы-манипуляторы. Их эксплуатация позволяет цехам выйти на инновационное качество исполнения процессов, увеличить результативность работы и перераспределить обязательства между приборами и людьми.
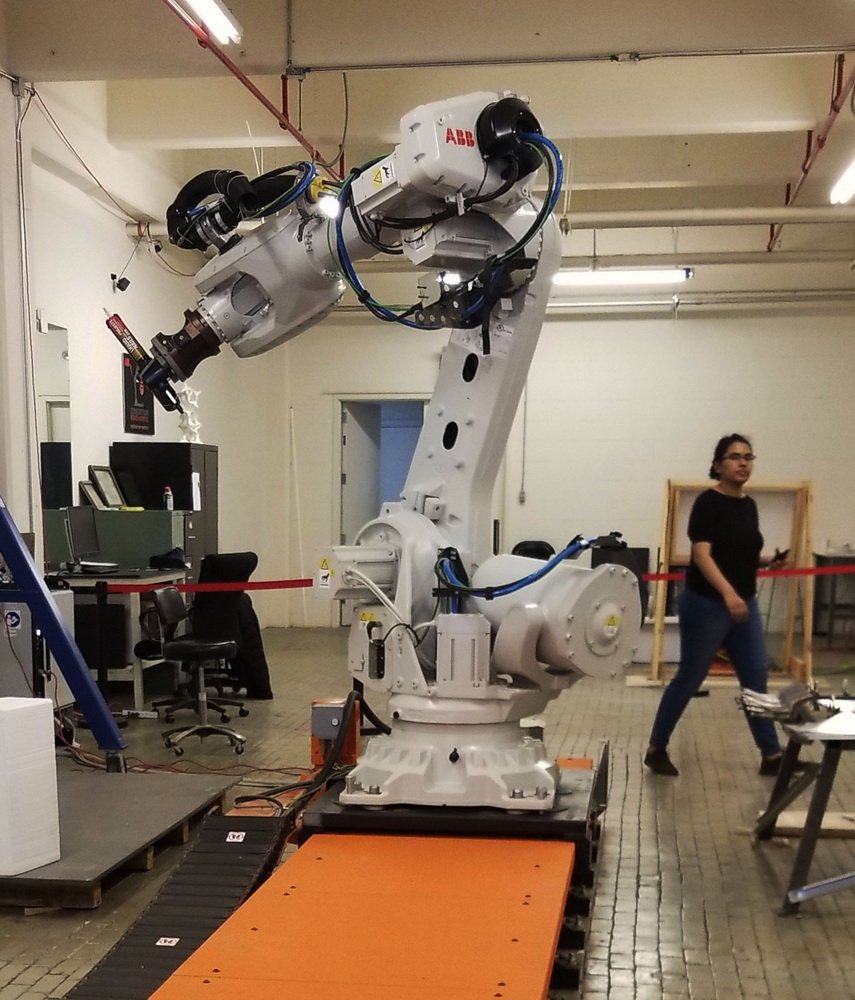
Робот-манипулятор это промышленная установка, которая выполняет функции руки человека. Это может быть как отдельное приспособление, так и главная составляющая сложного роботизированного набора. Отдельные узлы механизированной руки оснащены соединениями, позволяющими делать вращательные или поступательные действиями. Это обеспечивает многофункциональность подобных агрегатов.

С каждым годом увеличивается нужда в сокращении эксплуатационных затрат на предприятиях, из-за чего востребованность робототехники регулярно увеличивается. Это способствует активному расширению области. Сокращения трат на предприятиях можно достичь посредством минимизации числа ошибок, потерь сырья и количества несчастных случаев. Также нужно сделать цеха более мощными и технологически гибкими. Все эти вопросы способен решить надежный производственный робот манипулятор. Он работает с высокой точностью в любых условиях.
Функции робота манипулятора
Сегодня эксплуатация робота манипулятора производится для автоматизации сварки, фрезеровки, окраски, резки, шлифовки, сервиса станков и иных производственных мероприятий. Применение таких роботов вместо человека, при осуществлении главных технологических процессов, имеет следующие преимущества:
- Робот работает без участия человека. При роботизированной сварке сварные швы делаются ровными, аккуратными и одинаковыми на всех процессах. При оценке итога покраски поверхностей промышленным агрегатом может создаваться ощущение, что предметы вышли из одного копировального агрегата.
- Высокая производительность. Повышение производительности благодаря наличию технологически предопределенных опций, в которых скорость выполнения процесса человеком и оборудованием будет равной. Манипулятор промышленный обеспечивает высокую производительность благодаря сокращению времени на переходы из одной зоны в другую, за счет более быстрого кантования заготовок посредством вращателей и манипуляторов, но, прежде всего, за счет того, что агрегату не требуются остановки в ходе работы. Агрегат может функционировать в три смены и производить технологические действия по сервису рабочего инструмента автоматически. К примеру, очищать сопло горелки сварки от нагара, подрезать проволоку на спецстанции обслуживания или производить промывку краскопульта и пр. То есть, устройство робота манипулятора позволяет одновременно выполнять действия трех сварщиков, в зависимости от вида предмета и длины сварных швов.
- Способность постоянно функционировать в агрессивной для людей среде. Например, окрасочный агрегат сможет постоянно работать в условиях сплошного облака краски без негативного воздействия на здоровье людей.
Применение роботов манипуляторов
Стационарные роботы манипуляторы находят применение в следующих сферах:
- Автомобилестроение. Например, на предприятии Tesla действует порядка 160 роботизированных систем, которые выполняют массу процессов по сборке транспортных средств. При этом их количество постоянно расширяется.
- Электроника и электротехника. Например, популярный прибор Yaskawa Motoman MH12, осуществляющий сборку жестких дисков для компьютеров.
- Машиностроение и обработка металлов. На таких заводах промышленные роботы манипуляторы производят заключительную обработку и шлифовку разных элементов из металла.
- Химическая сфера. Здесь роботы используются для автоматизации процессов с опасными компонентами. К манипуляторам, эксплуатируемым в химической сфере, предъявляются специальные требования. Гидравлические роботы манипуляторы должны быть стойкими к агрессивным средам и обладать максимальной точностью позиционирования.
- Медицина и фармацевтика. В медицине агрегаты применяют в качестве помощника на работах. Роботы должны быть чувствительными, чтобы бережно выполнять все процессы. Также такие агрегаты позволяют совершать операции дистанционно.
- Сельское хозяйство. Здесь используют мобильные приборы для сбора урожая.
Активно используется пневматические промышленные роботы в промышленности, фармацевтике, образовании и в быту. Несмотря на высокую цену, многие компании активно пользуются промышленными установками. Многие руководители активно покупают такие агрегаты, поскольку это помогает проводить сложные процессы без остановки.
В быту также эксплуатируют домашние манипуляторы. Они выполняют такие задачи, как уборка квартиры, комнаты, офисного помещения. Роботы-уборщики могут быстро прибраться и в случае надобности возвращаться для подзарядки, при этом все действия выполняются без участия пользователя. В образовании находя применение учебные установки.
Виды промышленных роботов манипуляторов
- Программные. Это простые и эффективные установки, эксплуатируемые на промышленных объектах. Все процессы при этом заранее запрограммированы, и робот автоматически повторяет их. Управление здесь происходит как за счет персонального компьютера, так и посредством логического контроллера.
- Адаптивные. Современные приборы, оснащенные экранами и датчиками. Система оценивает окружающую обстановку и принимает эффективное решение о произведении того или иного действия.
- Интеллектуальные. Из чего состоит робот манипулятор такого типа? Это системы с задатками искусственного интеллекта. Отличаются хорошей гибкостью, функциональностью и долгой службой.
Классификация роботов-манипуляторов также происходит по конструктивному исполнению. В производственной области встречаются как мобильные, так и стационарные решения. Первые легко перемещать, они функциональностью, последние ценятся за надежность и возможность непрерывно выполнять одну и ту же операцию.
По виду силового привода выделяются электромеханические, пневматические, гидравлические и прочие агрегаты. По способу программирования отличают контурные, позиционные и комбинированные. Дополнительно их можно делят по грузоподъемности. Внедрение автоматизации в этапы производства существенно упрощают многие действия. Руководители производственных предприятий отмечают бесперебойность и высокую мощность за счет применения робототехники. Производственные приборы могут оснащаться разными видами манипуляторов в зависимости от оснащения производства.
Виды роботов манипуляторов по типу управления:
Управляемые процессы: требуют, чтобы каждым их действие управлял оператор. В силу ограниченных сфер применения, такие роботы не получили широкого распространения. Автоматы и полуавтономные мероприятия: функционируют строго по устанавливаемой программе, часто не имеют сенсоров и не могут корректировать свои мероприятия, не могут обойтись без участия пользователя. Автономные: характеристики манипулятора промышленного робота такого типа – выполнение запрограммированного цикла работ без участия человека, пользователя, согласно установленным алгоритмам и меняя свои действия в случае необходимости. Такие приборы могут полностью перекрыть поле деятельности на своей зоне конвейера, без привлечения живой рабочей силы.
По опциям и сфере использования:
Роботы делятся по назначению и выполняемым процессам: промышленные действия, бывают универсальные, машиностроительные, режущие и прочие. Это далеко не весь список: количество всевозможных типов постоянно увеличивается. Отметим, что вряд ли найдется такая сфера человеческой деятельности, где роботы не могли эксплуатироваться.
Роботы-манипуляторы применяются при производственной сборке предметов любых размеров. При работе с крупногабаритными элементами приборы, благодаря исключению человеческой работы, ускоряют производство и позволяют избежать использования дополнительных грузоподъемных приспособлений. При изготовлении мелких элементов значительно увеличивают скорость, точность и качество процессов.
Мобильные роботы, их типы, возможности и применение

В этой статье мы рассказываем о мобильных роботах , их истории появления и развития, типах, возможностях и областях применения в логистике и на производстве.
Узнайте больше, прочитав статью.
- Вступление
- Что такое мобильные роботы: определение
- История развития мобильной робототехники с примерами
- Виды мобильных роботов: классификация
- По среде, в которой передвигаются
- По устройству передвижения
- По навигации
- По автономности
- По способу управления
- Сферы применения современных мобильных роботов
- Популярные автономные мобильные роботы
Вступление
Каждое современное предприятие ищет все возможные способы сделать свою работу максимально эффективной. На помощь медицинским учреждениям, сельскохозяйственным компаниям, производственным складам и логистическим организациям приходят автономные мобильные роботы (AMR). Подобные устройства успешно заменяют устаревшее оборудование и позволяют улучшить такие характеристики, как скорость, точность и безопасность.
Что такое мобильные роботы: определение

Мобильными роботами называют автоматические механизмы, способные функционировать без участия человека и самостоятельно перемещаться в пространстве. AMR выполняют самые сложные задания, благодаря интеллектуальной технической базе запрограммированных знаний. В зависимости от системы, заложенной в блоке управления, робот передвигается автономно или подлежит управлению специалистом. Благодаря настройкам программы, механизм самостоятельно определяет траекторию движения или осуществляет движение по заданному маршруту. Мобильные роботы способны увеличить производительность рабочего процесса и оптимизировать трудозатраты, использование такой техники быстро окупается.
История развития мобильной робототехники с примерами
Робототехника начала свое развитие в первой половине ХХ века, и только спустя век был совершен мощный рывок.
Кратко опишем ключевые этапы.
- С 1939 по 1945 — непростое время Второй мировой войны связано с развитием бомб, оснащенных автопилотами.
- С 1948 по 1949 — появление первого аналога искусственного интеллекта в форме «умных механизмов» Elmer_Elsie. Они отличались простой конструкцией, но в то же время обладали способностью выполнять сложные действия.
- 1960 — выход в свет робота под названием «Животное Хопкинса».

- С 1966 по 1972 — работа над проектом по созданию робота Shakey the Robot, известного механизма с искусственным интеллектом.

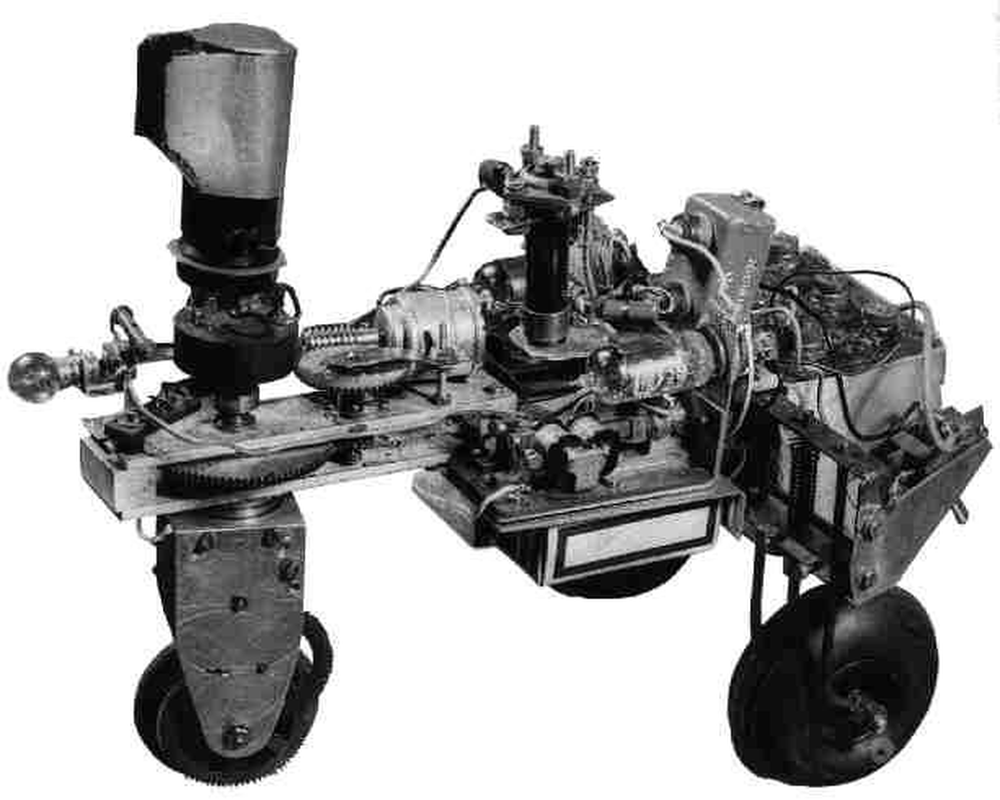
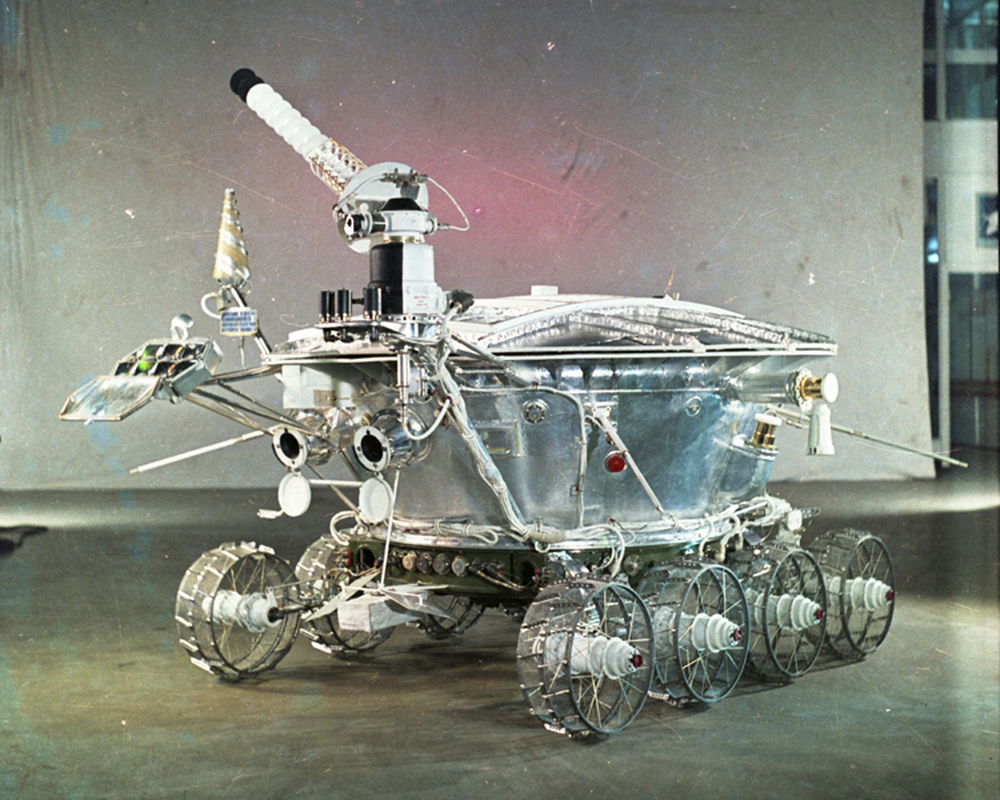
- 1970 — тестирование на Луне первого в истории человечества автономного механизма «Луноход-1», созданного советским инженером Георгием Бабакиным.
- 1980-е годы — появление первых домашних роботов, которые были разработаны для выполнения образовательных и развлекательных функций. В 80-х человечество стало свидетелем появления первых автомобилей, управляемых автопилотами, а также узнало о разработке роботизированных систем. Это десятилетие стало началом эпохи «самосознания» роботов BEAM.
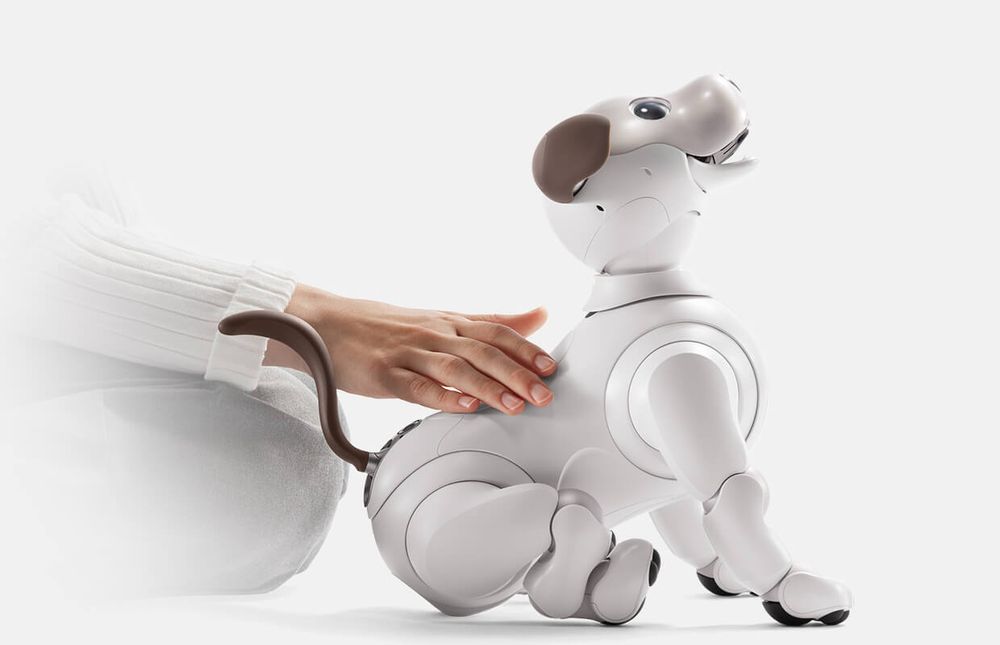
- 1990-е годы — в продаже появились первые медицинские роботы, которые были созданы при поддержке Министерства обороны США. В конце 20-го века на дорогах появились первые автомобили, управляемые автопилотами. В этот же период на Марсе осуществил высадку первый марсоход Pathfinder, а компания Sony разработала «умную собаку-робота» Aibo.
- С 2000 по 2010 — была создана колония мини-ботов, которые могут решать самые сложные задачи и взаимодействовать между собой, подобно насекомым. В это время на рынке появились первые роботы-пылесосы, предназначенные для домашнего использования. Активно идет работа над усовершенствованием военных мобильных механизмов и человекообразных устройств. В медицину и другие сферы активно внедряются перемещающиеся и сортирующие роботы.
- Второе десятилетие 21-го века — по всему миру распространяются многофункциональные роботы-беспилотники, способные самостоятельно принимать решения. В наше время появились первые механизмы, которые могут работать в сложных условиях и обслуживать нефтегазовые установки. В ближайшее время ожидается выход в свет роботов-квадрокоптеров и автоматических уборщиков.
Виды мобильных роботов: классификация
В зависимости от способности взаимодействия с внешней средой, мобильные роботы классифицируют по нескольким направлениям. Рассмотрим основные категории устройств.
По рабочей среде
По среде, в корой работают роботы, их делят на три типа.
- Наземные — сюда относят колесные, гусеничные и шагающие машины. Первую категорию представляют луноходы, марсоходы, транспортные роботы, роботы-пылесосы и автомобили с беспилотным управлением.
- Воздушные — в эту категорию входят геликоптеры и более компактные дроны-беспилотники.
- Морские — бывают подводного и надводного назначения. К первым относят батискафы, ко вторым — радиоуправляемые или автономные катера.
По устройству передвижения
В этой категории выделяют семь типов роботов, отличных по своей кинематике:
- колесные и гусеничные;
- шагающие и прыгающие;
- плавающие;
- летающие;
- лазающие;
- биомиметические;
- специализированные.
Биомиметические роботы разработаны на основе принципов существования живой природы. Своим названием подобные механизмы обязаны латинским словам bios и mimesis, что в переводе означает «жизнь» и «подражание» соответственно.
По способу навигации
Роботы отличаются и по способу ориентации в окружающей среде. Выделяют следующие навигационные схемы:
- Глобальные — такие роботы передвигаются по заданному маршруту с помощью оператора, определяющего координаты устройства в пространстве;
- Локальные — в таких устройствах отсчет координат начинается от точки старта;
- Персональные — ориентация робота в пространстве осуществляется за счет анализа устройством своего положения относительно других объектов.
Навигационные системы делятся на активные и пассивные. В первом случае точка нахождения определяется роботом, во втором — местоположение определяется путем подачи сигнала от внешних датчиков и камер.
По автономности
В этой категории выделяют три типа устройств:
- Роботы первого поколения — осуществляют перемещение по заранее заданной программе и выполняют четкую последовательность действий;
- Роботы второго поколения — механизмы, которым также изначально задаётся программа человеком, но они могут «принимать решения» и на основе информации от датчиков внешней или внутренней среды, которые могут следить, например, за освещенностью, или определять препятствия, или снимать и выдавать значения, определяющие положение робота в пространстве, его скорость;
- Автономные устройства, или роботы 3-го поколения — интеллектуальные роботы, созданные для решения задач по перемещению на сложных участках, таких как труднопроходимая или пересеченная местность.

По способу управления
В зависимости от способа управления роботов классифицируют на следующие типы:
— Автоматические: адаптивное, программное или интеллектуальное управление;
— Дистанционно управляемые: копирующие, командные, интерактивные, супервизорные, диалоговые;
— Ручные: шарнирно-балансирные, экзоскелетные.

Сферы применения современных мобильных роботов
Развитие робототехники существенно упростило жизнь и оптимизировало рабочий процесс. Сегодня многие компании и государственные учреждения повсеместно используют подобные устройства для улучшения итоговых результатов и снижения трудозатрат.
Перечислим основные сферы применения современных мобильных роботов.
- Промышленность. Эта сфера на сегодняшний день практически не обходится без роботов, которые позволяют оперативно решать поставленные бизнес-задачи. В промышленности AMR часто сочетают с программируемыми логическими контроллерами. Роботов используют при транспортировке материалов и на складах.
- Сельское хозяйство. Мобильные устройства позволяют решать ряд задач. Их используют в процессе сбора урожая и даже для оценки степени созревания фермерской продукции.
- Медицина. Применение роботов в здравоохранении позволяет существенно повысить качество медицинского обслуживания. Устройства используют для дезинфекции помещений и поверхностей, доставки препаратов и обеспечения функции мобильного присутствия. Сегодня есть все шансы встретить робота в больнице, который выполняет роль ассистента врача.
- Логистика и транспорт. Использование роботов в этой сфере позволяет компаниям быстро и эффективно доставлять продукцию. Такие устройства часто применяют на складах — они ускоряют рабочий процесс и обеспечивают дополнительную безопасность.
- Торговля и туризм. Мобильных роботов используют для автоматизации рабочих процессов. С их помощью проводится инвентаризация, уборка помещений и оказываются услуги, помогающие клиентам справиться с получением багажа и припарковать машину.
- «Умные города». С помощью AMR создаются безопасные города, оснащенные навигационными и информационными услугами. Роботов в них используют для доставки товаров и с целью выполнения функции патрулирования. Роботы помогают быстрее строить здания и проводить работы в части обследования объектов.

Популярные автономные мобильные роботы
На рынке робототехники представлена продукция ведущих производителей, таких как Mobile Industrial Robots, AGV и Ronavi. В производственной, торговой и других сферах чаще всего используют следующие модели:
- Робот MiR250 — автономное устройство нового поколения, используется для перемещения готовой продукции внутри помещения. Робот может быть укомплектован дополнительными модулями и манипулятором.
- Робот MiR1000 — используется в промышленности и здравоохранении с целью оптимизировать логистические процессы на предприятиях. Робот отличается маневренностью и высокой грузоподъемностью. Оснащен 3D-камерами, а также работает по технологии лазерного сканирования.
- AGV — универсальное решение для автоматизации производства на складах. Автоматизированная логистическая тележка позволяет оптимизировать затраты на персонал. Транспортное средство с электроприводом двигается по заданной территории и самостоятельно контролирует процесс.
Наибольшим спросом пользуются модели Ronavi M500 и Ronavi S50.

Мобильные роботы пользуются особым спросом в производственной, военной, торговой и медицинской областях. Многие эксперты предполагают рост спроса на робототехнику с искусственным интеллектом и среди массовых потребителей. Повсеместное применение роботов-пылесосов подтверждает их предположения. Использование подобных устройств облегчает жизнь, автоматизирует процесс и позволяет в оперативном порядке решать бизнес-задачи любого уровня сложности.
Top 3D Shop — официальный поставщик робототехники ведущих производителей на территории России. Обратитесь за консультацией к нашим специалистам, чтобы выбрать роботов для вашего склада или производства.
Что могут и где применяются роботы-манипуляторы

Источник: https://abb.com
Роботом-манипулятором принято называть тип промышленных роботов с функциями, аналогичными функциям человеческой руки. Манипулятор может быть как самостоятельным устройством, так и находиться в составе более сложного роботизированного комплекса. Сегменты манипулятора имеют соединения, допускающие вращательное (например, у шарнирного робота) или поступательное (линейное) движение. В этой статье мы рассказываем о роботах-манипуляторах и примерах их применения.
Источник: habr.com
Растущая потребность в снижении эксплуатационных расходов на предприятиях является основной движущей силой мирового рынка робототехники. Снижение расходов может быть достигнуто за счет уменьшения ошибок в производственном процессе, потерь сырья и количества несчастных случаев, повышения технологической гибкости и производительности предприятия, улучшения условий труда и степени безопасности сотрудников. И в этом всем помогают роботы, которые используются в большинстве отраслей промышленности из-за их способности с высокой точностью выполнять сложные повторяющиеся задачи даже в опасных условиях.
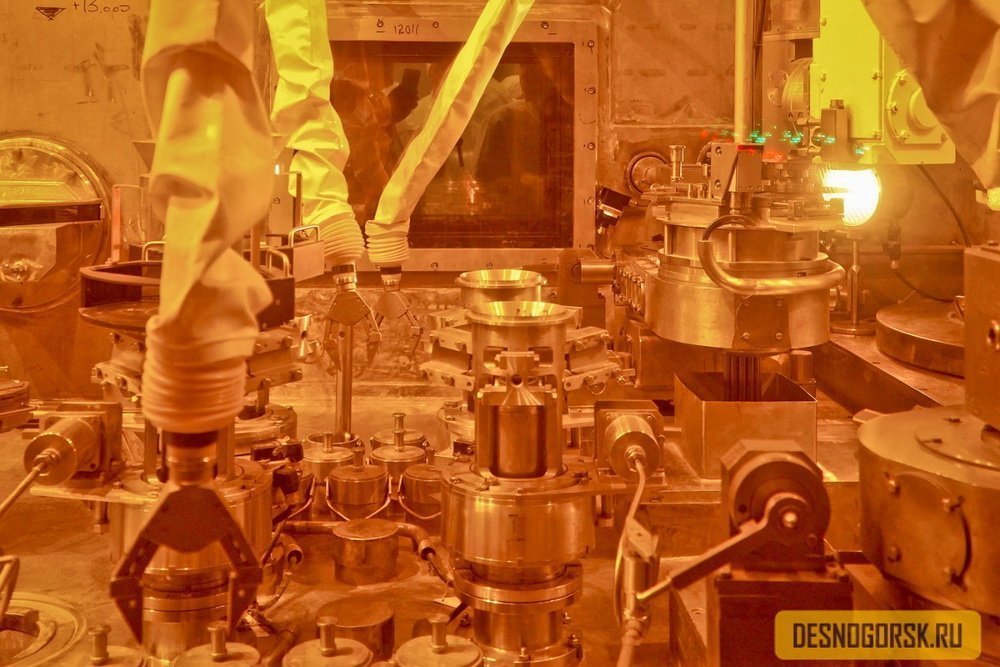
Источник: desnogorsk.ru
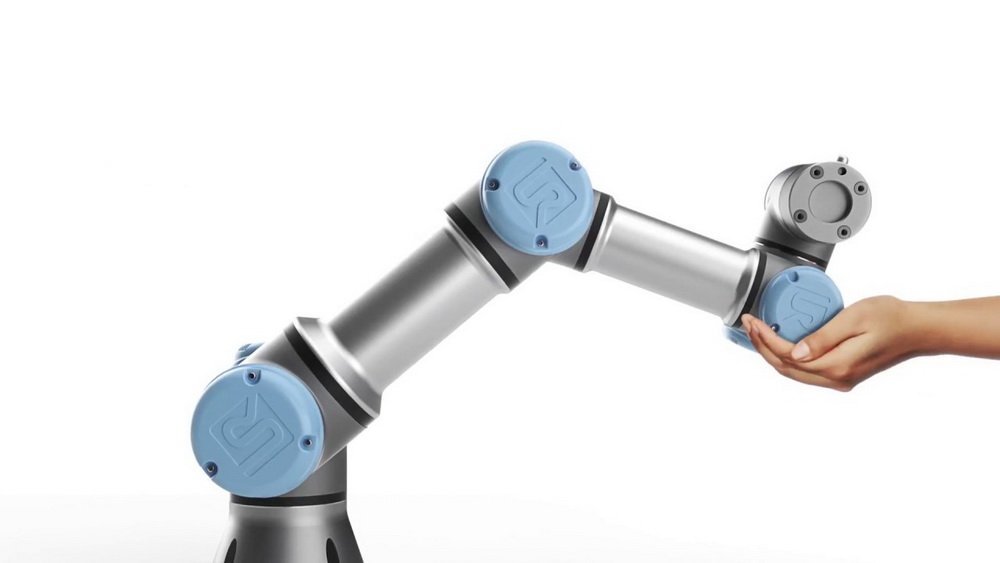
Среди ведущих производителей роботов-манипуляторов такие компании, как: FANUC, KUKA, HANWHA; также для производства и других областей бизнеса интересны коллаборативные модели Universal Robots, а в образовании будет очень полезна продукция UFactory — оптимальный набор оборудования этих и других производителей для любых целей можно подобрать со специалистами Top 3D Shop. Подробнее о роботах-манипуляторах читайте далее.
Обзор применения
Источник: wikipedia.org
Роботы-манипуляторы можно разделить по областям их применения в производстве, в порядке убывания их присутствия в промышленности:
Автомобильная промышленность

Источник: technavio.com
Например, завод “Tesla” расположен на участке площадью 464,5 тысячи м2, на нём работает более 160 роботов, причём уровень автоматизации постоянно повышается — роботы устанавливают батареи, сам двигатель, внутренности салона автомобиля, все кабели.
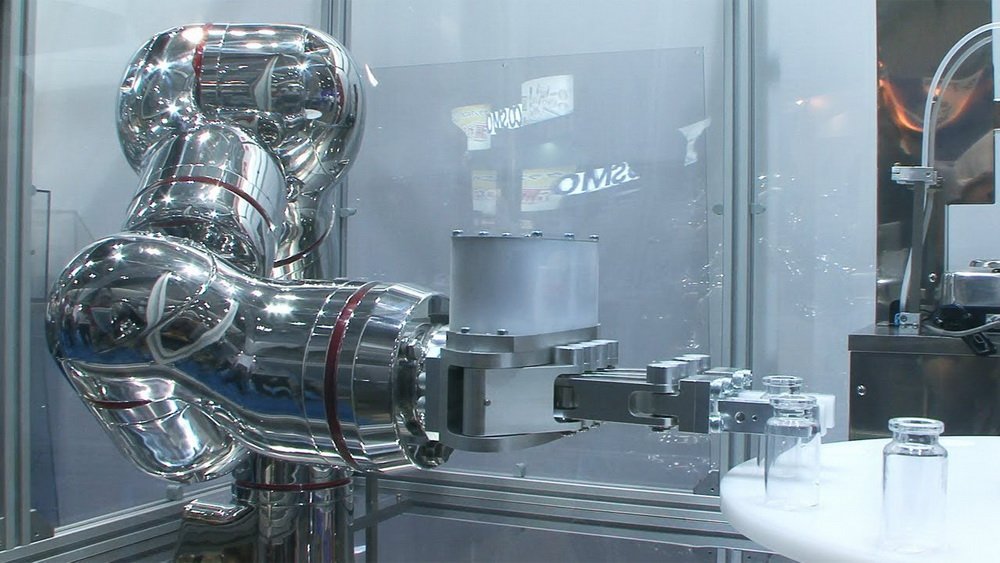
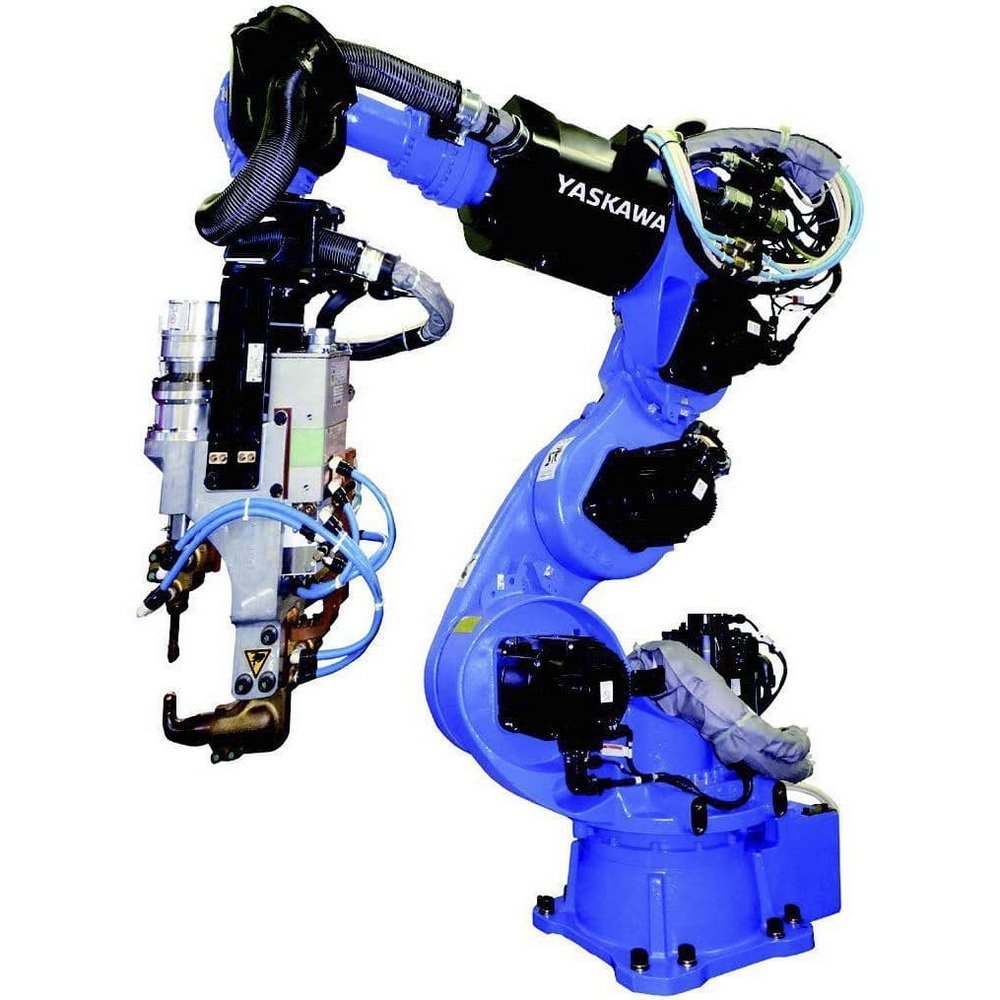
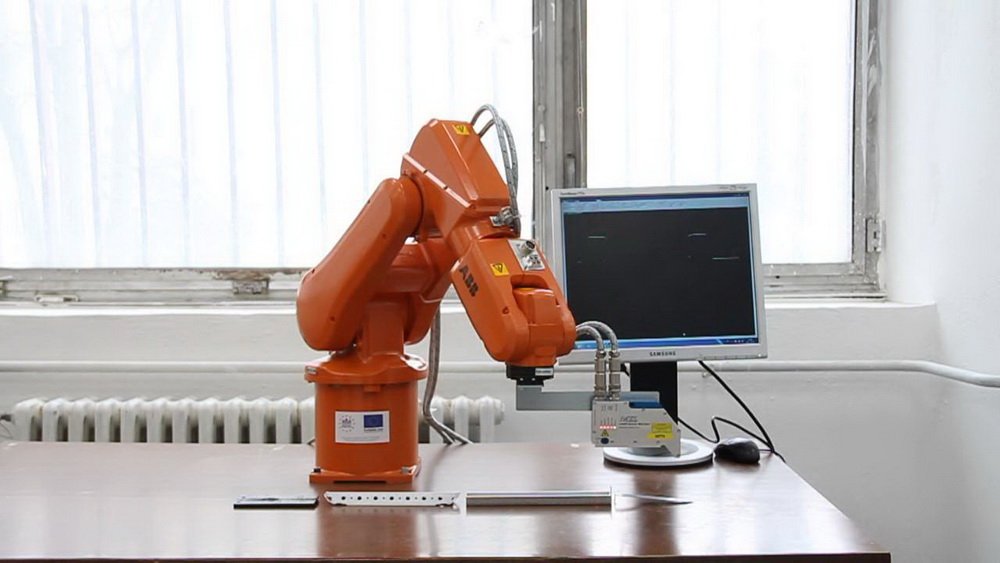
Электротехника и электроника
Источник: yaskawa.eu.com
Компактный шестиосевой робот-манипулятор Yaskawa Motoman MH12 собирает жесткий диск компьютера с помощью сменного захвата.
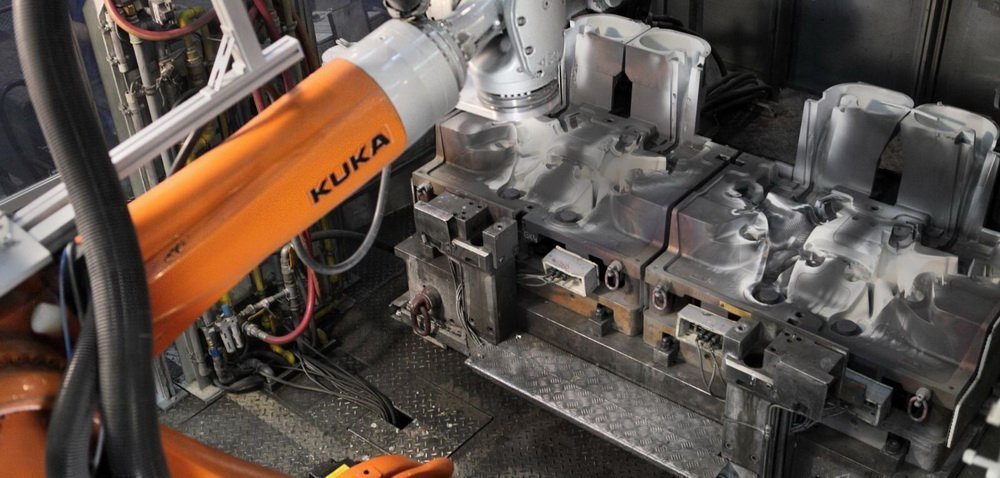
Металлообработка, машиностроение

Источник: kuka.com
Шлифовка и финишная обработка фрезерованных формовочных инструментов, например, штампов для кузовных деталей, форм для деталей из композитных материалов и форм для литья пластиковых деталей под давлением.
Химическая промышленность
Источник: robohub.org
Kawasaki Heavy Industries разработала первого в мире робота из нержавеющей стали с семью степенями свободы. Он будет использоваться в области обнаружения наркотиков и в химической промышленности для автоматизации экспериментов, в которых используются опасные вещества. Благодаря корпусу из нержавеющей стали его можно стерилизовать с помощью перекиси водорода.
Медицина и фармацевтика

Источник: kuka.com
KUKA LBR Med — роботизированная инновация для медицины. Он основан на чувствительном легком роботе LBR iiwa. Благодаря своим сенсорным возможностям для обеспечения безопасности, быстрому обучению и простому управлению оператором, он применим в качестве помощника в операционной.
LBR Med чрезвычайно чувствительный. Благодаря датчикам крутящего момента в суставе, робот аккуратно касается пациента, при прикосновении врача автоматически отодвигается в сторону. С другой стороны, он всегда готов помочь в сложных манипуляциях. Благодаря специальному биосовместимому покрытию робот обеспечивает абсолютную стерильность рабочей поверхности.
Продовольствие и сельское хозяйство

Источник: indicator.ru
Система «Vegebot» для автономного сбора урожая салата включает в себя портативный компьютер с управляющим программным обеспечением, стандартный робот-манипулятор UR10 с шестью степенями свободы (DOF), две камеры и настраиваемую под тип овощей «руку», размещенные на мобильной платформе.
Образование

Источник: education.lego.com
LEGO Mindstorms — это хорошо проработанная серия инструментов для изучения робототехники. Широкие возможности набора и простота сборки позволяют провести полный урок робототехники (введение, сборка, программирование и тестирование) за удивительно короткое время.
Иные области

Источник: jerusalemhouseministries.net
Корпус морской пехоты США находится в процессе развертывания сверхлегкого робота «Usmc Eod Robot» — небольшой мобильной роботизированной системы, которая позволяет морским пехотинцам обезвреживать взрывоопасные боеприпасы (EOD) и разминировать самодельные взрывные устройства. Устройство может использовать свои «руки» для подъема на небольшие препятствия, такие как лестницы.
Как выбрать
При выборе роботов-манипуляторов для вашего производства следует обратить внимание на следующие параметры:
- назначение
- форм-фактор, вес, электрические параметры
- количество и размеры «рук», радиус действия, число степеней свободы
- грузоподъемность
- повторяемость траектории и статическая повторяемость
- условия эксплуатации
Типы роботов-манипуляторов
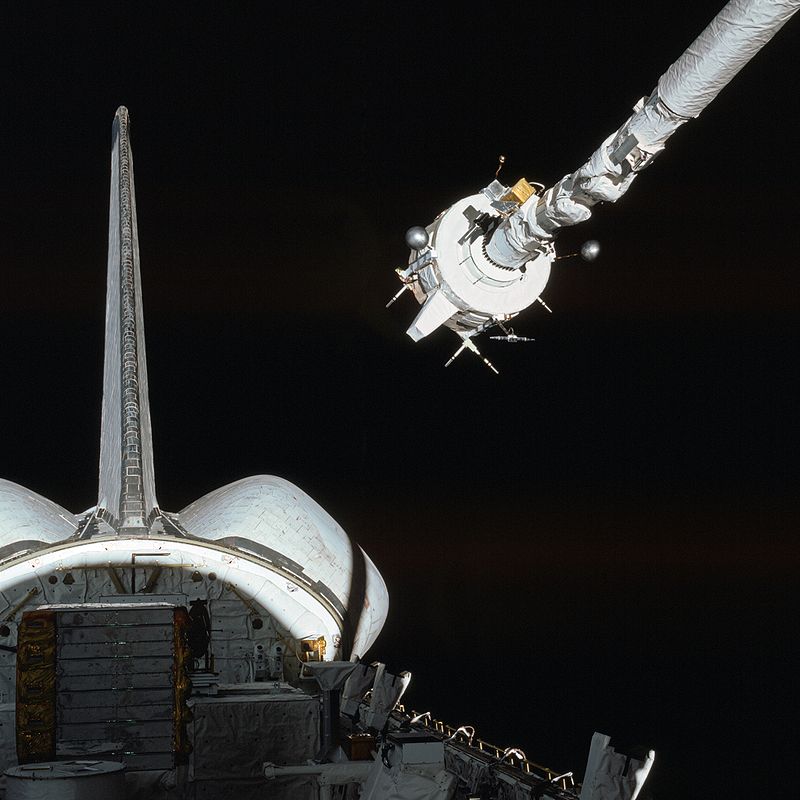
Источник: nasa.gov
Какой-то единой классификации роботов-манипуляторов не существует. Можно говорить об устоявшемся на рынке разделении по ряду параметров.
По типу монтажа роботов
Стационарные
Источник: symmetrymagazine.org
Наиболее распространенный на рынке тип манипуляторов. Возможен любой тип крепления, например, напольный, потолочный или настенный. Обладают высокой грузоподъёмностью при широком радиусе действия, большом числе степеней свободы и универсальностью.
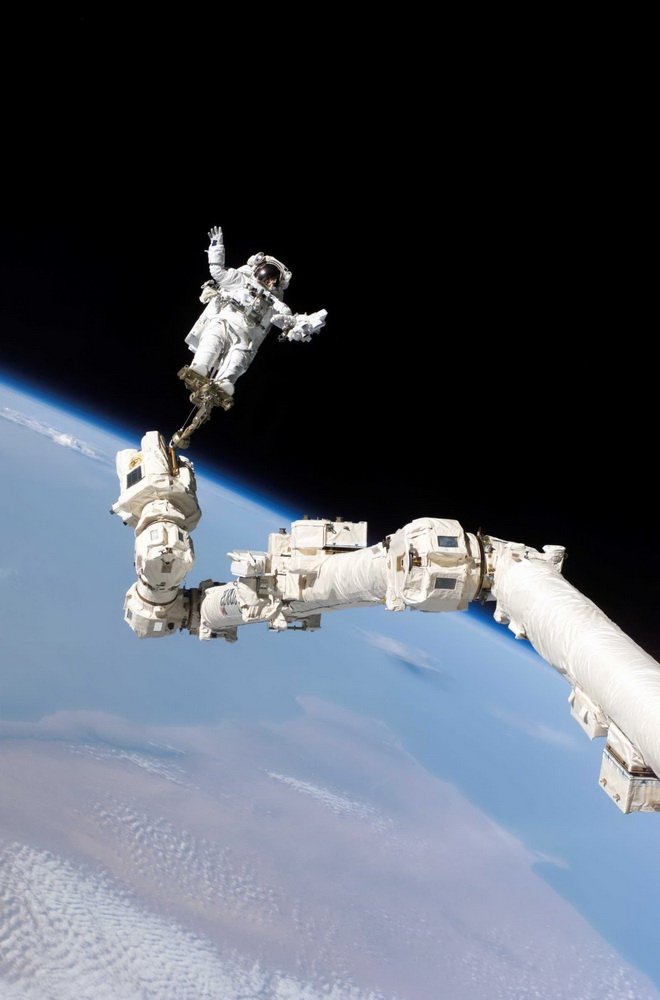
Мобильные
Источник: symmetrymagazine.org
Такие роботы не связаны с каким-то конкретным местом установки и могут выполнять задачи как в любой точке производства, так и на значительном удалении от него. Мобильные манипуляторы могут иметь как постоянное питание, так и автономное. Возможно всепогодное или подводное исполнение устройств и эксплуатация в жестких или опасных условиях, например, для разминирования. Манипуляторы такого типа имеют малую массу и физические размеры, могут быть компактно уложены для транспортировки, рассчитаны на столкновения с препятствиями и переворачивания. Зачастую, такие роботы оснащаются системами искусственного интеллекта. К их недостаткам можно отнести высокую стоимость и малую полезную нагрузку (хотя есть и исключения).
Вертикальные (крепление на пол или потолок)

Источник: virtualmarket.innotrans.de
Всякий раз, когда пространство ограничено, вы можете использовать 7-миосевой робот Blastman в варианте для настенного монтажа. При необходимости, вы можете установить двух роботов, работающих на противоположных стенах. Основные движения настенных роботов – продольные и вертикальные. Размеры и конструкция могут быть подобраны в соответствии потребностями клиента.
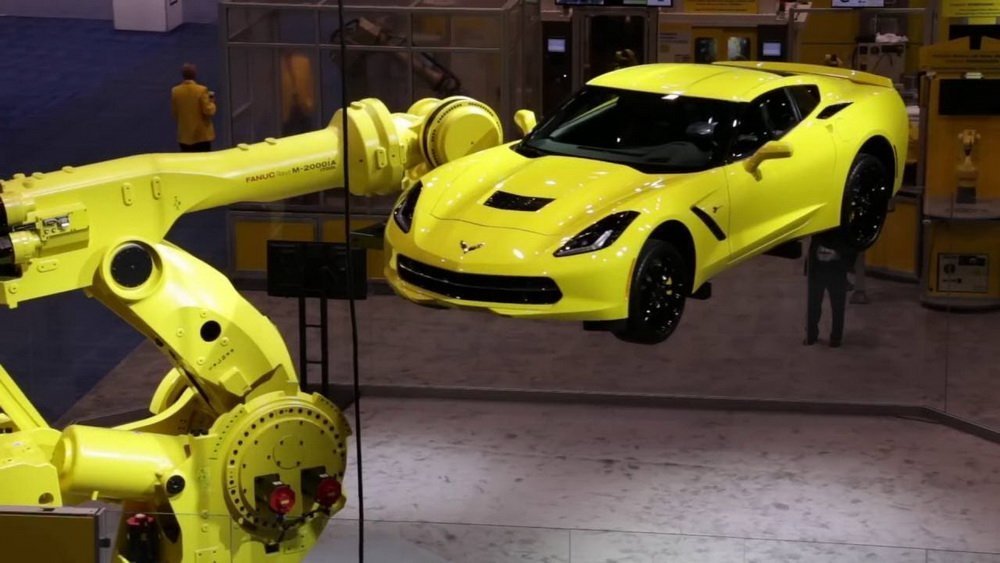
Горизонтальные (портальные)
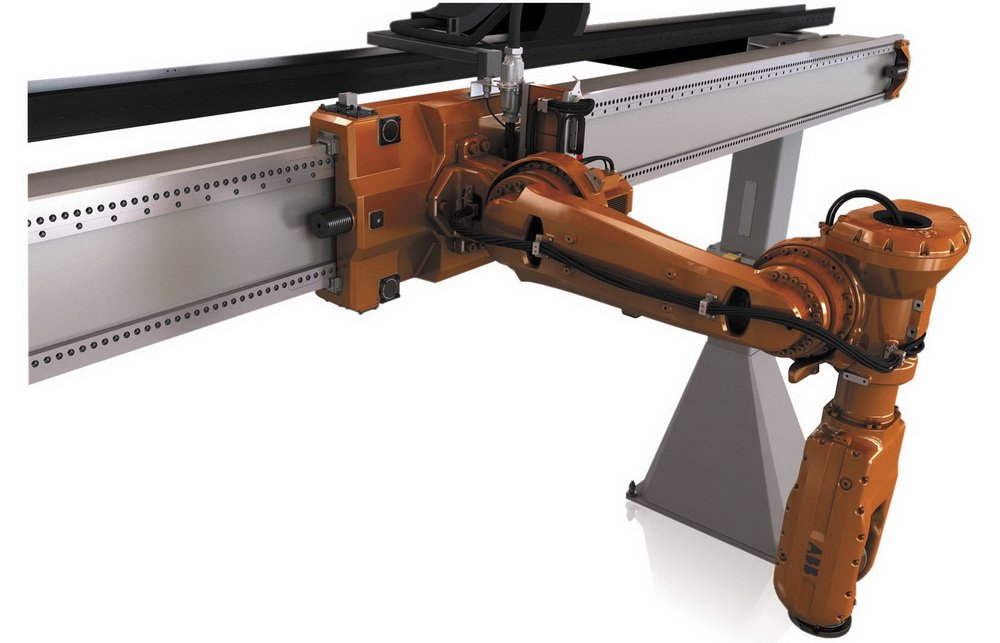
Источник: directindustry.com
Это демонстрация работы портального манипулятора ABB 6620LX, обслуживающего несколько станков. Длина трасса для робота может составлять до 27 метров. Когда вам нужно гибкое обслуживание для 3 или более машин – это наиболее экономичное решение.
По типу применения
По типу применения роботы делятся на автономных, работающих по заданной программе без участия человека, коллаборативных, работающих вместе с человеком и управляемых непосредственно оператором.
С ручным управлением

Источник: kuka.com
Благодаря своей чувствительности, KUKA LBR iiwa может собирать гибкие детали совместно с человеком или независимо.
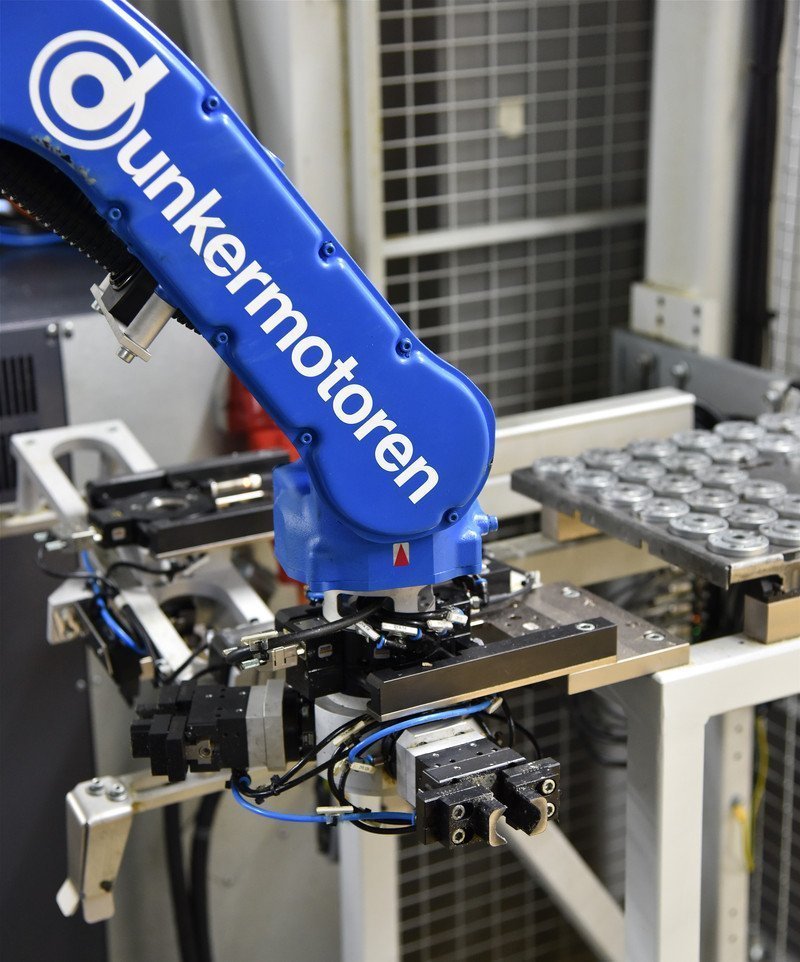
Программируемые (автономные)
Источник: directindustry.com
Yaskawa Motoman — уникальный компактный 7-осевой робот оптимален для использования в производстве автомобилей. Манипулятор может располагаться в непосредственной близости от обрабатываемых объектов и других роботов, что позволяет создавать гибкие производственные линии с высокой плотностью размещения. Использование данного устройства сократит размеры производственной линии и уменьшит время сварки.
Коллаборативные роботы или коботы
Источник: blog.robotiq.com
Кобот — предназначенный для взаимодействия с людьми в общем рабочем пространстве. К такого типа устройствам предъявляются повышенные требования безопасности конструкции и ПО, подразумевающие невозможность нанесения человеку травмы.
По функционалу (зависимости от выполняемых функций):
Пайка и сварка

Источник: santanderpyme.com.mx
Сварочные роботы сочетают беспрецедентное качество сварных швов с невероятной стабильностью дуги при очень низком токе и при очень высоких скоростях сварки.
Параметры дуги, управляемые компьютером, позволяют задавать оптимальные условия сварки по длине сварного шва, снижая напряжение при нагреве сварочной пластины во время цикла сварки. Сварочные роботы зачастую оснащаются вращающимся столом, позволяющим выполнять сварку деталей в любом положении.
Обработка материалов

Источник: kuka.com
Ударная обработка сглаживает фрезерованные поверхности, укрепляет структуру материала и равномерно распределяет внутренние напряжения. Ударная обработка позволяет получить гладкость поверхности около 0,1 мкм, что было бы невозможным при помощи одного лишь фрезерования. За счет холодной ковки повышение твердости материала может достигать 30 процентов. Зачастую можно полностью отказаться от дополнительной обработки поверхности. Автоматизированный процесс ударной обработки замещает ручные операции шлифования и полировки.
Сборка и разборка
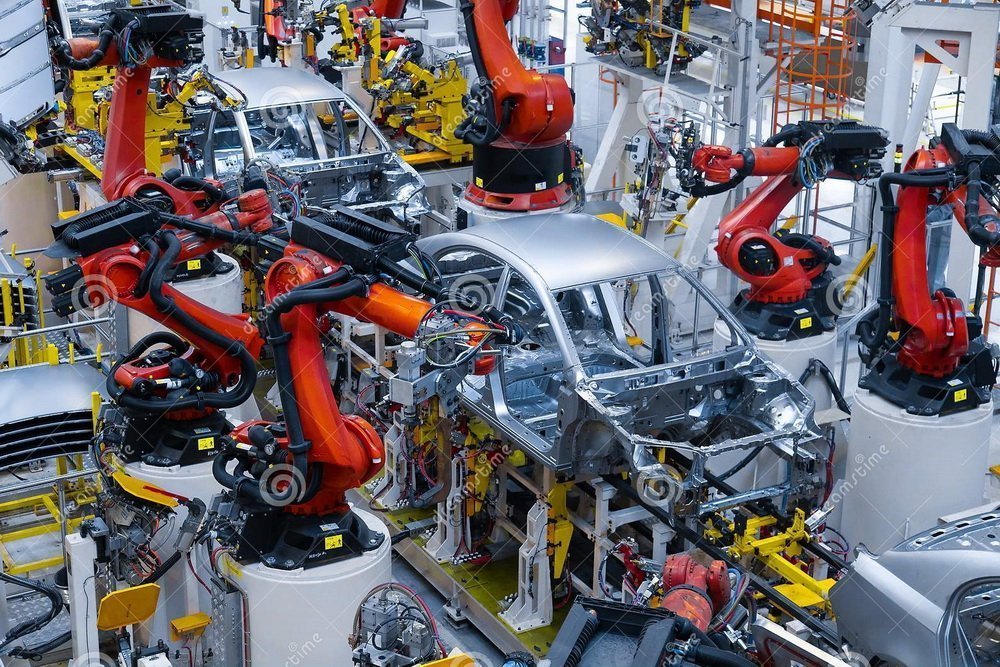
Источник: dreamstime.com
Роботы-манипуляторы используются при производственной сборке изделий любого размера.
При работе с крупногабаритными деталями роботы, за счет исключения человеческого труда, ускоряют производственный процесс и позволяют избежать применения дополнительных грузоподъемных механизмов. При производстве мелких изделий существенно увеличивают скорость, точность и качество работ.
Очистка, покраска и дозирование
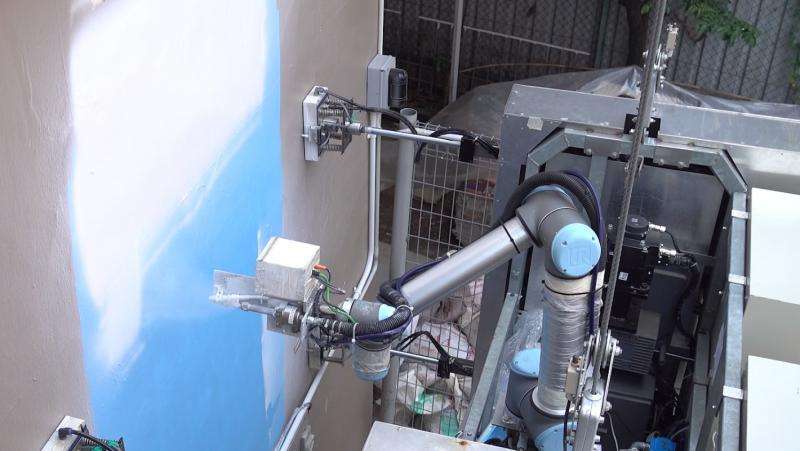
Источник: phys.org
Для удаления старой краски или нанесения новой обычно требуется команда из нескольких человек. Робот-манипулятор, который может очищать внешние поверхности с помощью струи воды под высоким давлением или пескоструйной обработки, и наносить новые слои краски требует максимум одного оператора. В случае, когда обработка производится в промышленных условиях, один оператор может контролировать сразу целый робототехнический комплекс. В отличие от человека, с роботом вы можете быть уверены, что краска будет нанесена строго в соответствии с требуемой технологией и идеально ровно.
Фрезерование и шлифование
Источник: welt.de
Простая и гибкая автоматизированная фрезеровочная установка, расположенная на небольшой площади, сочетает идеальную точность фрезеровочного и шлифовочного станков с подвижностью 6-осевого манипулятора.
Резка и обработка
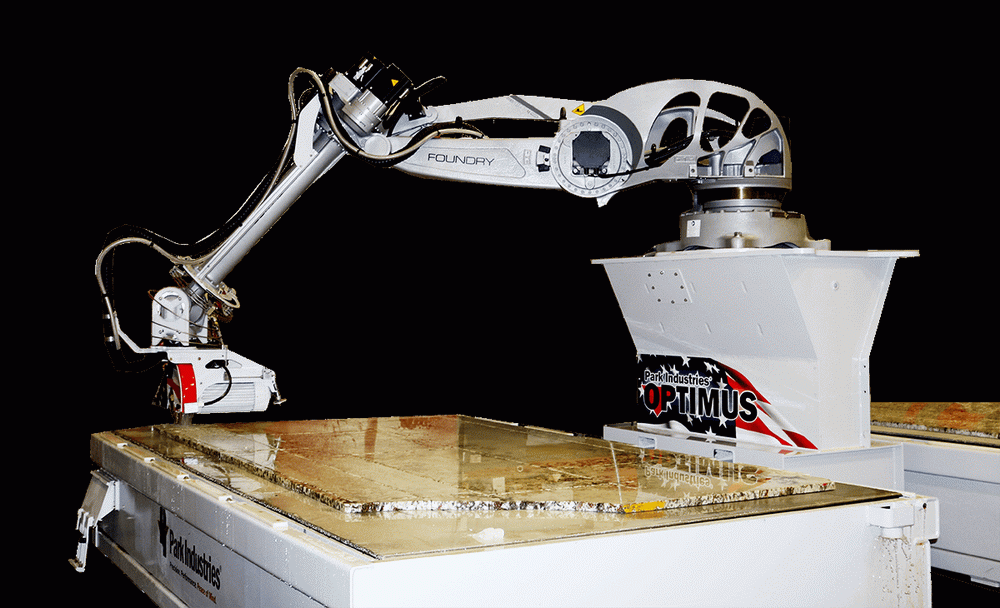
Источник: parkindustries.com
Резка и обработка любого материала является весьма травмоопасной работой для человека. Роботы-манипуляторы лишены этого и многих других человеческих недостатков, кроме того, они способны выполнять эту работу с высочайшей точностью, минимизируя потери материала и сокращая время обработки.
Строительные

Источник: fbr.com.au
Такие манипуляторы могут строить объекты с высокой степенью точности, сократив до минимума потери кирпича и работать 24 часа в сутки в любую погоду, не останавливаясь для высыхания раствора, поскольку используют специальный полимерный клей вместо цементного раствора.
Другие

Источник: theengineer.co.uk
Перечислить все сферы, где могут применяться роботы-манипуляторы, попросту невозможно. Но одно можно с уверенностью сказать уже прямо сейчас: нет таких сфер нашей жизни, где использование роботов было бы невозможно. Например, этот медицинский робот успешно провел операцию на глазу 70-тилетнего пациента через разрез в 1 мм.
Исходя из полезной нагрузки
0-20 кг
Источник: abb.com
Компактные, высокоскоростные и высокоточные промышленные роботы с небольшими грузоподъемностью и рабочей зоной – эффективное, надежное, бюджетное и быстро окупающееся решение. Зачастую имеют версии для работы в чистых помещениях Clean Room ISO 5 (Class 100).
20-80 кг

Источник: abb.com
Высокопроизводительные роботы общего назначения, оптимизированные для повторяющихся быстрых операций. Роботы такого типа позволяют создавать более компактные производственные цеха с повышенной плотностью монтажа устройств и при неизменно высоком качестве работы.
80-300 кг
Источник: abb.com
Предназначены для суровых условий производства, которые могут быть слишком жесткими для стандартных роботов и оборудования. Роботов такого типа отличает уменьшенный износ, высокая надёжность, простота настройки и управления, увеличенные интервалы профилактического обслуживания.
300-1000 кг

Источник: abb.com
Идеально подходят для тяжелых условий эксплуатации независимо от отрасли. Типичные области применения включают в себя работу с тяжелыми приспособлениями и объектами, поворот кузовов автомобилей, операции с деталями в литейном или кузнечном цехах, погрузку и разгрузку машин, перемещение грузов на складах.
1000-3000 кг

Источник: fanucamerica.com
Эти настоящие исполины легко и быстро управляются с самыми тяжелыми грузами. Могут использоваться на погрузо-разгрузочных работах, перемещая с высокой точностью самые тяжелые детали машин, судов или локомотивов. Широкий набор рабочих инструментов позволяет добиться высокой эффективности за разумную стоимость.
другие нагрузки
Кейсы применения
Применение дельта-роботов в производстве оладьев

Источник: abb.com
Высокоскоростная автоматизированная укладка оладьев (450 штук в минуту) на фабрике «Honeytop Speciality Foods Ltd.» с помощью роботов ABB IRB 360 FlexPicker. Использование машин позволило на 20% увеличить скорость укладки даже по сравнению с лучшими работниками, существенно сократить время упаковки, увеличить безопасность на производстве, сократить рабочую площадь, уменьшить потери продукции и увеличить доходность бизнеса.
Обратите внимание, как аккуратно робот раскладывает оладьи, упавшие друг на друга — это работа интегрированной с роботом системы распознавания образов.
Гибкость программирования позволяет произвольным образом менять количество оладьев в упаковке.
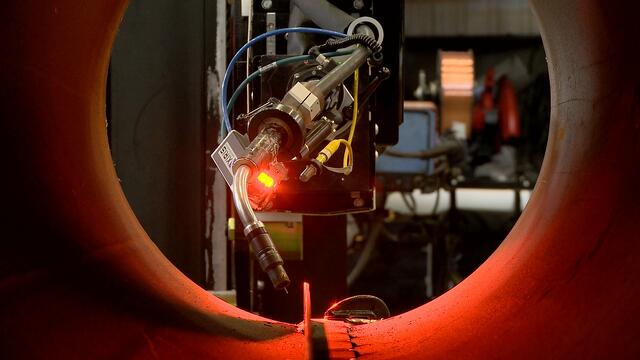
Применение робота-манипулятора для сложной сварки внутри трубы

Источник: ljwelding.com
Задача:
С продавцом труб в Мексике был заключен контракт, который требовал несколько процессов сварки. Во-первых, необходимо было сделать сварные перегородки вдоль внутреннего длинного шва трубы диаметром 46 см до 5 метров в длину. Сварка перегородки внутри трубы вручную, с работником в ограниченном пространстве, была трудоемкой, неудобной и небезопасной для работника. Заказчику также потребовался процесс дуговой сварки для наружных кольцевых сварных швов. Наконец, у него было ограниченное время и строгий бюджет, поэтому он заказал спроектировать и построить сварочный манипулятор MIG+SAW с обеими функциями, встроенными в одну машину.
Решение
Индивидуальный дизайн и проектирование, включая специально разработанную систему MIG с узкой головкой и сварочной камерой.
Средства управления для интеграции SAW+MIG, систему камер, колонного и стрелового манипуляторов. Результатом стала единая панель управления, в которую были включены все необходимые функции.
Технические характеристики оборудования:
- специализированная колонна и штанга с выдвижной мачтой;
- один конец штанги оборудован сварочным манипулятором с системой вспомогательной дуги, которая дополнена подачей и ликвидацией лишнего флюса;
- противоположный конец манипулятора CaB оснащен специально разработанной системой сварки MIG с узкой головкой и камерой для дуговой сварки.
Источник: ljwelding.com
Результат
Заказчику не требуются две отдельные станции для сварки.
Благодаря специализированной системе MIG с узкой головкой, больше не требуется отправлять сварщика в замкнутое пространство, и вся сварка может выполняться с наружной стороны детали. Сварка производится в автоматическом режиме.
Круглые наружные сварные швы, выполненные с помощью дуговой системы, имеют более высокое качество и более прочный сварной шов, чем «ручные» сварочные швы MIG или TIG.
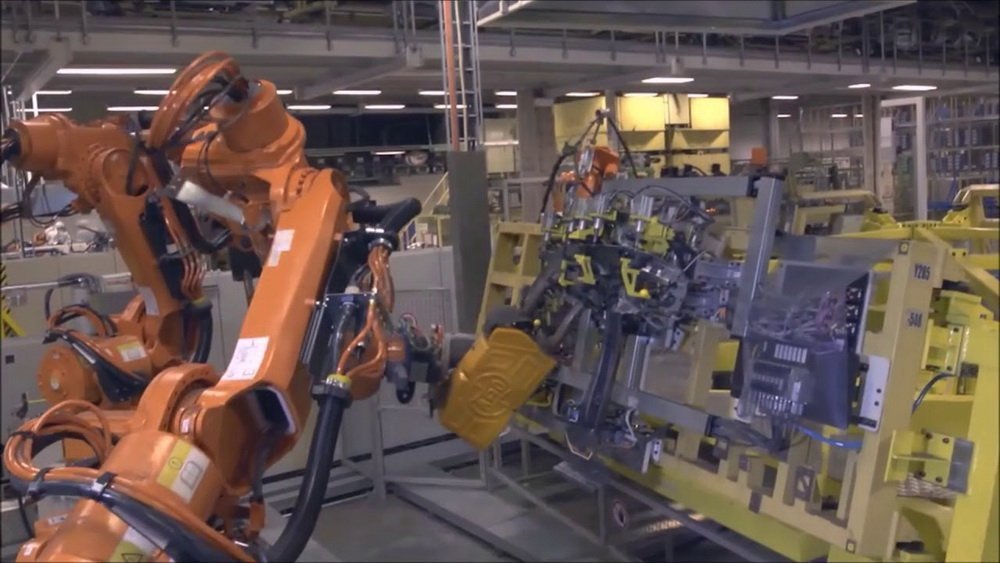
Применение роботизированного комплекса точечной сварки корпусов автомобилей в концерне Volvo
Задачи:
- Увеличить производительность “Volvo cars”, улучшить качество продукции.
- Увеличить гибкость производственных линий для выпуска различных новых моделей.
- Уменьшить занимаемую площадь, сократить ручной труд, увеличить безопасность труда.
- Оптимизировать жизненный цикл оборудования.
Результат: Увеличена производительность и время непрерывной работы производственных линий. Сокращено время обслуживания и увеличен срок службы оборудования. Более компактное размещение позволило установить дополнительное оборудование. Минимизировано участие людей в производстве, что позволило сократить как расходы на заработную плату, так и риски несчастных случаев.
За 2018 год «Volvo Cars» зафиксировала существенный рост выручки — на 21% по сравнению с предыдущим годом.
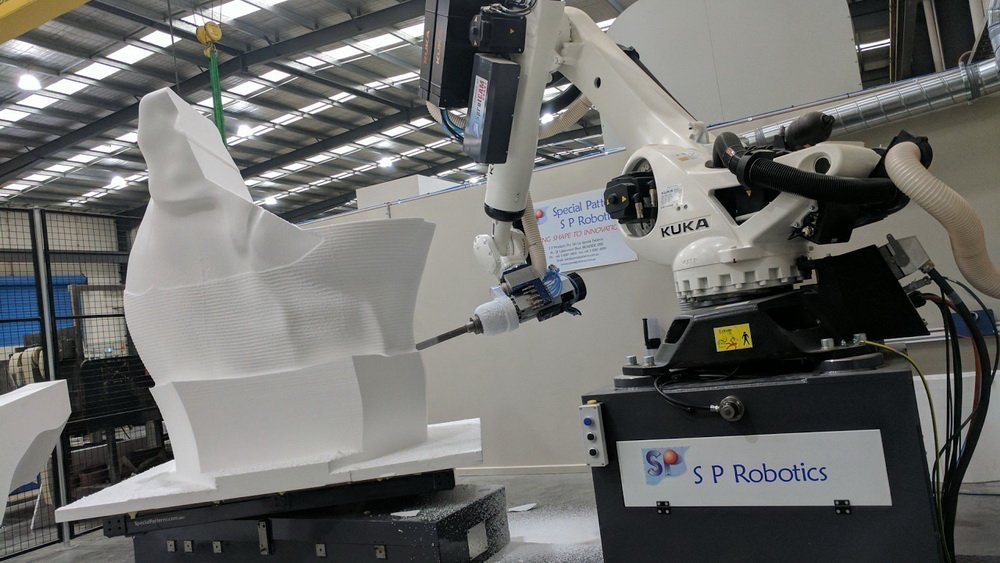
Применение робота-манипулятора для вырезания фигуры из пенополистирола
Источник: specialpatterns.com.au
Робототехническая система для создания моделей из вспененного пенополистирола для компании “Special Patterns” из Австралии. В качестве инструментов используется горячая проволока и фрезерование, с удалением пыли вокруг места работы. Робот KUKA KR120 AA с контроллером KUKA.CNC.
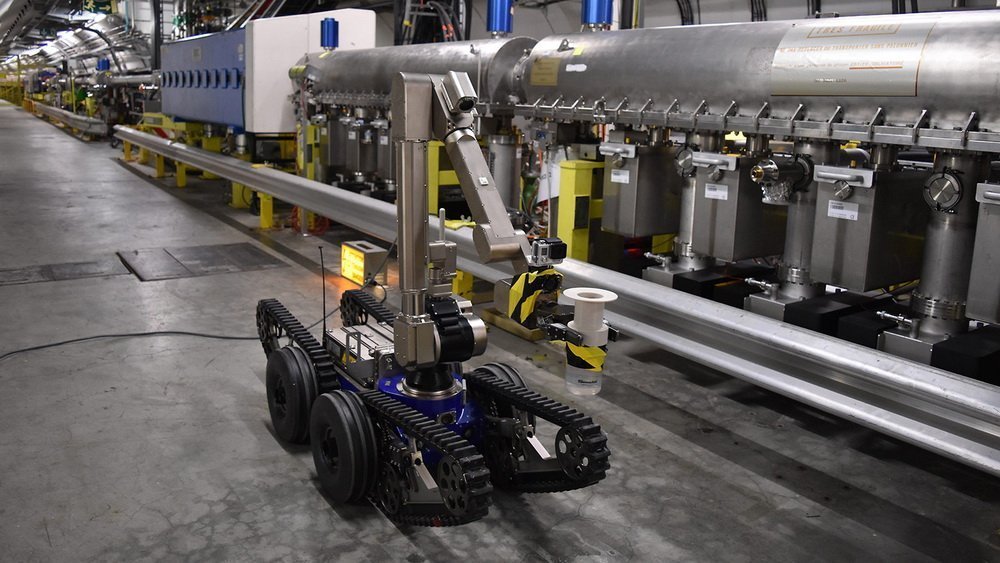
Роботы-распылители и международный проект ИТЭР

Источник: habr.com
Задача: нанести медное покрытие на плоские контактные поверхности электрических алюминиевых шин для международного проекта ITER (Международный термоядерный экспериментальный реактор).
Как это было сделано: ООО “Acton” построило роботизированный комплекс, состоящий из контроллера OWEN, камеры распыления, робота Kawasaki RS006L и контроллера Kawasaki E01.
Рекомендуемое оборудование, примеры
Роборука uArm Swift Pro
Для знакомства с робототехникой и обучения работе с ней будущих операторов и программистов.

Источник: newatlas.com
Компания UFactory представила новую роботизированную руку uArm Swift Pro, которая может стать отличным помощником в быту для выполнения совершенно разных задач, а также для людей с ограниченными возможностями. В отличие от многих подобных мини-роботов, данная модель отличается приемлемой ценой, что, несомненно, является большим преимуществом при выборе подобных роботов.
В базовой комплектации uArm Swift Pro оборудован присоской. Дополнительно можно установить различные захваты, головку для 3D печати, камеру или лазер для гравировки.
Модель двигается плавно, обладает высокой точностью и повторяемостью до 0.2 мм, что идеально подходит для рисования, лазерной гравировки и 3D печати.
Hanwha — коллаборативный робот

Источник: https://www.hycobot.com
Коллаборативный робот, собрать которого, благодаря модульной конструкции, сможет собрать даже школьник. Работать с ним так же просто, как использовать смартфон. При желании, оператор может вручную переместить робота в нужное положение и позволить ему запомнить новое движение. Такая функция прямого обучения позволяет даже неопытным операторам заставить робота выполнять задание. Тем не менее, это полноценное производственное оборудование с соответствующими ресурсом и точностью.
Один блок управления может управлять двумя роботами одновременно, что снижает первоначальные затраты. Модуль ввода-вывода и гнездо EtherCAT, расположенные на корпусе робота, позволяют легко подключать различные периферийные устройства, такие как захват, оптический датчик и другие.
Ознакомьтесь на сайте с большим ассортиментом роботов для любого производства.
Выводы
Автоматизация производств с помощью робототехники ведет к повышению производительности и рентабельности, что уже неоднократно показано во множестве источников, в том числе на страницах нашего блога.
Роботы-манипуляторы FANUC, KUKA, HANWHA, Universal Robots, UFactory и других производителей применяются в модернизации предприятий большинства отраслей. Оптимальный набор оборудования этих и других производителей для любых целей можно подобрать со специалистами Top 3D Shop.
Подписывайтесь на наш телеграм-канал с отборными кейсами Роботизации и Автоматизации со всех уголков мира:
Роботы
Робототехника

Андроид — это слово греческого происхождения обозначает робота или другой синтетический организм, внешне напоминающий человека. «Андроидом» обычно называют и мужчин, и женщин, однако более правильным было бы называть роботов женского пола «гиноидами» [1] .
Дистанционное управление — управление роботами на расстоянии: с нескольких сот метров или с другого конца света.
Нанороботы — крошечные роботы, которые когда-нибудь будут использоваться для строительства, обслуживания и ремонта систем на молекулярном уровне.

Функциональное определение робототехники Лаборатории робототехники Сбербанка:
Как зародилась масштабная коррупционная схема при внедрении ИТ в ПФР при участии «Техносерва» и «Редсис». Подробности современная робототехника (роботика, robotics) представляет собой скорее целое семейство исследовательских направлений, технологий, продуктов и изделий. Это семейство объединено тремя свойствами, которые выполняются одновременно:
- устройство способно чувствовать (SENSE) окружающий мир или его элементы (используя сенсоры);
- устройство способно понимать (THINK), обрабатывать получаемую информацию о внешнем мире, создавая и адаптируя модель окружающего мира и своего поведения;
- устройство способно действовать (ACT), изменяя окружающий мир в соответствии с моделью своего поведения.
Каталог «Робототехника» на TAdviser
По этому адресу доступен каталог «Робототехника»..
Три закона робототехники Айзека Азимова
Устав читать про то, как выдуманные роботы убивают своих создателей, писатель-фантаст Айзек Азимов представил три закона робототехники в небольшом рассказе «Хоровод» (1942 год). С тех пор они часто упоминаются в художественных произведениях, посвященным роботам. Вот эти три оригинальных закона [2] :
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред
2. Робот должен повиноваться всем приказам, которые дает человек, кроме тех случаев, когда эти приказы противоречат первому закону
3. Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит первому и второму законам
- В 1986 году в романе Азимова «Академия и Земля» появляется Нулевой закон роботехники: «Робот не может навредить человечеству или своим бездействием допустить, чтобы ему был нанесен вред». В 2016 году американский профессор-юрист Марк Ротенберг выдвинул Четвертый и Пятый законы: «Робот должен открыто идентифицировать себя» и «Робот должен быть способен публично обосновать свои действия».
2020
2016
Сатья Наделла
1. Искусственный интеллект (ИИ) должен создаваться, чтобы помогать человечеству
2. ИИ должен быть прозрачен: всегда должна иметься возможность выяснить, как он работает
3. ИИ должен приводить к росту эффективности решения задач, не нарушая достоинства людей
4. ИИ должен поддерживать разумную конфиденциальность и заслужить доверие, защищая вверенную ему информацию
5. ИИ должен контролироваться алгоритмически: человек имеет возможность «отменить» ненамеренно причиненный им вред
6. ИИ должен быть защищен от помех и относиться ко всем людям одинаково
- В то время глава Microsoft; правила были перечислены в интервью журналу Slate.
Марк Тильден
1. Робот должен защищать свое существование любой ценой
2. Робот должен находить и поддерживать доступ к источнику энергии
3. Робот должен постоянно искать новые, лучшие источники энергии
- Крупный робототехник, основатель компании WowWee, автор концепции BEAM. Его правила созданы именно для BEAM-роботов, которые построены на основе простых аналоговых цепей — нехитрых, зато надежных и эффективных.
2011: Вариант EPSRC
1. Роботы не должны разрабатываться с единственной целью уничтожения или причинения вреда людям
2. Ответственным лицом выступает человек, а не робот. Робот — инструмент для достижения человеческих целей
3. Роботы должны разрабатываться с учетом безопасности их использования
4. Роботы — искусственные создания, они не должны играть на эмоциях чувствительных людей. Робот не может быть неотличимым от человека
5. Всегда должна иметься возможность узнать лицо, юридически ответственное за данного робота
- Комитет по инженерии и научным исследованиям (Engineering and Physical Sciences Research Council) — британское государственное агентство, занимающееся регулированием научно-технической сферы в стране [3] .
23 принципа искусственного интеллекта
Созданный в 2014 году Институт будущего жизни (Future of Life Institute, FLI)— исследовательская и просветительская организация, функционирующая на общественных началах и изучающая риски, которым подвергается человечество, в особенности те, которые связаны с прогрессом в области искусственного интеллекта (ИИ). В числе основателей института — космолог Макс Тегмарк и один из главных разработчиков Skype Яан Таллинн, в его консультативный совет входят генетик Джордж Чёрч, физик Стивен Хокинг, предприниматель Илон Маск и многие другие выдающиеся деятели современной науки и техники. В январе 2017 года FLI провел мастерскую и конференцию «Полезный ИИ» (Beneficial AI), важнейшим итогом которой стали принципы ИИ, названные, по национальному парку Асиломар, где проходила конференция, асиломарскими.
Перечню принципов предпослано краткое вступление: «Искусственный интеллект уже дал людям всего мира ряд полезных инструментов, применяемых ими в повседневной жизни. Его дальнейшее развитие в будущие годы и столетия, направляемое следующими принципами, откроет невероятные перспективы помощи людям и расширения их возможностей».
Научные исследования
- Цель исследований: целью исследований в сфере ИИ должно быть создание не безадресного разума, а полезного разума.
- Финансирование исследований: инвестиции в ИИ должны сопровождаться финансированием исследований, направленных на обеспечение его полезного применения, в том числе для решения острых животрепещущих вопросов информатики, экономики, юриспруденции, этики, социологии, например:
- как нам сделать будущие ИИ-системы высоконадежными, чтобы они делали то, что нам требуется, никогда не ломались и не были подвержены взлому?
- как нам с помощью автоматизации повысить свое благосостояние, сохранив за людьми ресурсы и возможность целесообразной деятельности?
- как нам изменить наши законодательные системы в сторону большей справедливости и эффективности, чтобы они шли в ногу с развитием ИИ, и как управлять рисками, связанными с ИИ?
- в соответствии с какими ценностями необходимо строить ИИ, и каким правовым и этическим статусом он должен обладать?
Этика и ценности
- Безопасность: ИИ-системы должны быть надежными и безопасными в течение всего срока службы, и эти их качества должны быть верифицируемыми везде, где такая верификация применима и осуществима.
- Технологическая прозрачность: если ИИ-система причинит вред, должна быть возможность установить причину.
- Правовая прозрачность: при участии автономной системы в принятии судебных решений всякое ее предложение должно снабжаться удовлетворительным объяснением, которое может быть проверено компетентным уполномоченным человеком.
- Ответственность: моральная ответственность за функционирование передовых ИИ-систем и последствия пользования (а также злоупотребления) ими лежит на их проектировщиках и создателях, которые обязаны — и имеют возможность — продумать эти последствия.
- Соответствие ценностей: при разработке ИИ-систем с высокой степенью автономности необходимо гарантировать соответствие их задач, а также поведения в процессе функционирования, человеческим ценностям.
- Человеческие ценности: проектирование и эксплуатация ИИ-систем должны быть совместимы с идеалами человеческого достоинства, прав, свобод и культурного многообразия.
- Неприкосновенность частной жизни: человек, предоставляющий ИИ-системе полномочия для анализа и использования сгенерированных им данных, должен иметь доступ к этим данным, право ими распоряжаться и их контролировать.
- Свобода и неприкосновенность: применение ИИ для обработки персональных данных не должно приводить к неправомерному ограничению реальной или воспринимаемой свободы людей.
- Общее благо: технологии ИИ должны приносить пользу и новые возможности максимальному количеству людей.
- Общий успех: экономическим процветанием, создаваемым благодаря ИИ, необходимо широко делиться, чтобы пользу получило все человечество.
- Человеческий контроль: людям принадлежит выбор, делегировать ли ИИ-системе принятие решения для достижения целей, выбранных людьми, и если да, то как именно делегировать.
- Неподавление: власть, контролирующая самые передовые ИИ-системы, должна с уважением относиться к социальной и гражданской активности, от которой зависит здоровье общества, и не подавлять ее, а заботиться о ее совершенствовании.
- Гонка ИИ-вооружений: необходимо избежать гонки в создании автономных систем вооружения смертельного действия.
Вопросы на дальнейшую перспективу
- Осторожность в отношении возможностей: поскольку на данный счет нет единого мнения, следует воздерживаться от категорических суждений касательно потолка возможностей будущих ИИ-систем.
- Значение: передовые ИИ-системы, возможно, привнесут фундаментальное изменение в историю жизни на Земле, поэтому необходимо обращать соответствующее внимание и выделять достаточные ресурсы на планирование таких систем и управление ими.
- Риски: необходимо направить усилия, соразмерные ожидаемому эффекту, на прогнозирование и предотвращение угроз, — особенно катастрофических и экзистенциальных, — исходящих от ИИ-систем.
- Рекурсивное самосовершенствование: необходимо поставить под жесткий контроль развитие самосовершенствующихся и самовоспроизводящихся ИИ-систем, способное привести к их быстрому качественному или количественному росту.
- Общее благо: суперинтеллект должен разрабатываться лишь на службе всеобщих этических идеалов и на благо всего человечества, а не отдельного государства или организации.
Документ открыт для подписания, и на данный момент его подписали уже более тысячи исследователей, непосредственно занимающихся вопросами ИИ и робототехники, и более двух тысяч других специалистов. Это, конечно, ничтожно мало по сравнению с количеством тех, кому знакомы Три закона роботехники, но инициатива ширится.
Законодательство и налоги для роботов
Модели производителей
- Boston Dynamics
- Grishin Robotics
- Abagy Robotic Systems
- Promobot (Промобот)
- AlfaRobotics (АльфаРоботикс)
- ScratchDuino ПО для детского образовательного робототехнического комплекса — РОББО
Как роботы заменяют людей
Киборги
Коботы
Промышленные роботы
Крупнейшим потребителем промышленных роботов является Азия.

Годовые поставки промышленных роботов (тыс. штук), в разбивке по регионам. Данные Международной Федерации робототехники (International Federation of Robotics, IFR)
Ведущей промышленностью по использованию роботов является автомобилестроение.

В каких отраслях используются промышленные роботы
Сервисные роботы
Роботы в медицине
- Роботы в медицине
- Роботы-хируги
- Роботы-хирурги (мировой рынок)
Роботы в пищевой индустрии
Боевые роботы
Подводные роботы
Складские роботы
Чемпионаты по робототехнике
2019: Россияне победили на международном чемпионате робототехники в Сингапуре
Совместная команда Дальневосточного федерального университета (ДВФУ) и Института проблем морских технологий Дальневосточного отделения Российской академии наук (ИПМТ ДВО РАН) одержала победу на открытом Чемпионате Азии по подводной робототехнике — Singapore AUV Challenge-2019, который проходил в Сингапурском политехническом университете с 8 по 11 марта 2019 года.
Как рассказали TAdviser в ДВФУ 12 марта 2019 года, в рамках чемпионата был представлен аппарат, который называется Pandora. Он готовился специально для чемпионата. Робот умеет выполнять различные функции под водой, в частности, распознавать отдельные предметы при помощи глаз-видеокамер, перевозить грузы, поднимать и сбрасывать их в определенном месте. Подробнее здесь.
Основные события
2023
Топ-10 направлений развития персональной робототехники
Институт статистических исследований и экономики знаний НИУ ВШЭ 21 июня 2023 года сообщил TAdviser о том, что при помощи системы анализа больших данных iFORA выявил наиболее востребованные функции и сферы применения персональных роботов.

Топ-10 направлений развития персональной робототехники
Источник фото: issek.hse.ruСпрос на персональных роботов повышается по мере роста численности населения, поскольку увеличивается и число людей пожилых, с ограниченными возможностями, страдающих хроническими заболеваниями, требующих постоянной помощи. Возможность делегировать роботам выполнение рутинных операций позволяет решить проблему дефицита обслуживающего персонала, в частности в сфере медицины, сокращает расходы на уход за пациентами. С развитием и удешевлением технологий персональная робототехника перестала быть доступна исключительно обеспеченным людям. Некоторые государства уже включают затраты на роботов в свои бюджетные расходы и субсидируют покупку необходимой техники для целевых групп граждан. С учетом этих трендов по итогам анализа больших данных были выделены наиболее востребованные и перспективные сферы применения персональной робототехники (табл. 1).

Первостепенное внимание в научно-технологической повестке уделяется образовательным роботам, которые считаются одним из первых типов домашних роботов (еще в 1982 г. был выпущен компанией Heathkit образовательный робот HERO). В рыночной аналитике данная сфера применения роботов обсуждается чуть менее активно. Образовательные роботы могут использоваться для обучения разных категорий (детей, в т. ч. с особыми образовательными потребностями, будущих врачей и медсестер: роботы-тренажеры уже используются для отработки действий при оказании первой помощи в случае инсульта) и разным навыкам (в частности, программированию и иностранным языкам: такие роботы могут обладать большим словарным запасом, знают несколько методик обучения и распознают произношение) и др.
Следующий важный тренд научно-технологической повестки — роботы для терапии аутизма. Каждый сотый ребенок в мире страдает расстройством аутистического спектра (РАС) и роботы данного вида, как правило, ориентированы прежде всего на детскую аудиторию. Для достижения результатов лечения один ребенок с таким расстройством может заниматься со специалистами разного профиля около 40 часов в неделю. Роботы могут «взять» на себя какую-то часть нагрузки, хотя на данном этапе небольшую. Они не являются автономным источником помощи и выполняют роль посредника в обучении и играх детей с психотерапевтом, ослабляя возможные негативные последствия социального взаимодействия. Такие роботы могут адаптироваться к уровню навыков ребенка, помогать их улучшить, например, демонстрируя допустимые социальные реакции. В то же время программы роботов имеют недостатки (робот может «не понимать» ребенка, не знать какие-либо игры), а также остро стоит вопрос цены в связи с общими высокими тратами семей, в которых воспитываются дети с РАС.
Для ухода за людьми с ограниченными физическими возможностями предназначены довольно широко обсуждаемые в академической литературе и СМИ роботы для личной мобильности. К подобным устройствам можно отнести, например, интеллектуальные инвалидные коляски с голосовым управлением, умеющие ориентироваться в окружающей среде за счет специализированных датчиков и определять местоположение пользователя. Такие роботы физически взаимодействуют с людьми, снижают зависимость от близких, медицинских и социальных работников и тем самым повышают автономность и качество жизни пользователей. Управление роботом происходит путем вращения руки, что обеспечивает минимальную нагрузку на мышцы. Механизм перевернутого маятника удерживает сиденье робота в горизонтальном положении, что снижает нагрузку на пользователя. Роботы для личной мобильности перемещаются по заданному навигатором маршруту, более маневренны, чем обычные инвалидные коляски, распознают препятствия и пешеходов, могут легко преодолевать узкие места, неровные поверхности, ступеньки и уклоны на проезжей части.
Роботы-помощники активней освещаются в рыночной повестке, нежели в научно-технологической. Они подходят практически для всех групп населения, включая наиболее уязвимые. Функционал роботов-помощников крайне разнообразен: уборка полов; мойка окон; стрижка газонов; «кухонные» операции (приготовление пищи, сервировка стола и под.); гигиенические процедуры и кормление людей с ограниченными физическими возможностями и др. С точки зрения технических функций роботы умеют удерживать предметы и обращаться с инструментами и оборудованием — бытовыми электроприборами, посудой, инвентарем для уборки. Кроме того, робот может выполнять открывающие и закрывающие движения (для использования холодильника, посудомойки, ящиков, шкафов и под.).
Приоритетным видом в рыночной повестке являются роботы-охранники. Это, как правило, мобильные роботы, которые призваны патрулировать территорию. При противоправных действиях или экстренных ситуациях они должны вызвать сотрудников служб реагирования, некоторые модели могут физически помешать скрыться нарушителям закона (например, поймать их сетью) или, наоборот, «прогнать» их (облить струей воды и т. п.). На текущем этапе этот тип роботов не может полностью заменить человека, но позволяет существенно повысить степень нужной защиты.
Перспективным направлением персональной робототехники являются роботы-медсестры. Они позволяют облегчить и минимизировать работу персонала по уходу за пациентами, что особенно актуально в условиях нарастающего дефицита медицинских работников. Роботы-медсестры могут осуществлять мониторинг отдельных параметров организма (включая отправку данных лечащему врачу), вводить инъекции лекарств, помогать при подъеме с кровати и др. Наиболее эффективны в этой роли роботы-гуманоиды, так как их человекоподобный вид вызывает большее доверие и помогает выстроить взаимодействие с пациентом.
Реабилитационные роботы набирают популярность в связи с прогнозируемым ростом объемов восстановительной медицины, в частности, увеличением количества травм, инсультов и других заболеваний (нервно-мышечных, нейродегенеративных и т. п.). К данной категории относятся экзоскелеты, включая специализированные роботизированные комплексы, имеющие разные режимы для отработки отдельных навыков (ходьба, вставание, подъем по ступенькам, приседание) и восстановления соответствующих групп мышц. В отличие от протезов, экзоскелеты не заменяют утраченные органы, но расширяют возможности организма человека и/или возвращают его к прежнему состоянию, а также способствуют снижению трудозатрат медицинского персонала и улучшению качества оказываемой помощи.
Чуть менее активно в сравнении с перечисленными выше видами роботов в научной литературе рассматриваются роботы-компаньоны — социальные роботы, обученные общаться с человеком. Они могут распознавать образы, голос, считывать эмоции и выражать их самостоятельно. Не взаимодействуя с пользователем физически, роботы-компаньоны способны оказывать психологическую поддержку и в режиме телеприсутствия выполнять функции ассистента: бережно будят в нужное время, напоминают о встречах и приеме лекарств, могут рекомендовать оздоровительные мероприятия в случае ведения неактивного образа жизни, помогают в онлайн-общении (умеют отвечать на звонки, читать электронную почту, использовать социальные сети), вызовут такси и скрасят досуг (включают и рекомендуют музыку, аудиокниги, видео). Некоторые роботы-компаньоны могут проявлять эмпатию и формировать социальные связи с владельцем, что весьма актуально на фоне обострившейся в глобальном масштабе проблемы одиночества. Только в США 14 млн человек старше 65 лет живут одни. Для преодоления данной проблемы, негативно влияющей и на здоровье, в штате Нью-Йорк, например, Управление по делам пожилых людей предоставляет социальных роботов более чем 800 пожилым жителям штата.
Весьма динамично развивается рынок роботов для развлечений. В сравнении с социальными роботами, чей функционал охватывает широкий спектр задач, связанных с психоэмоциональным состоянием человека, эти роботы более просты и нацелены только на улучшение настроения пользователя. Примером продукта в данной категории являются «умные» колонки, которые воспроизводят истории, аудио, видео, умеют подключаться к социальным сетям. Отдельные модели могут даже танцевать. Спрос на роботов для развлечений заметно повысился после пандемии, к 2028 г. прогнозируется рост рынка почти в четыре раза по сравнению с 2022 г. К этой же категории относятся роботы для игры с домашними животными. Такой робот способен автономно перемещаться по дому, побуждая домашнего питомца следовать за ним, или направлять его с помощью указки. Помимо новых эмоций и физической нагрузки, робот может давать угощение и даже кормить животное, дистанционно открывая специальный дозатор.
Замыкают рейтинг направлений развития персональной робототехники как в исследовательской повестке, так и в рыночной роботизированные протезы, предназначенные для замещения и восстановления утраченных органов и их функций. Такие протезы могут имитировать индивидуальные жесты, передавать тактильные ощущения, снижать нагрузку на здоровые конечности, обеспечивать «нормальные» типы движения (когда, например, человек с обычным протезом идет «приставным» шагом), позволяют пользователю влиять на параметры функционирования искусственной конечности.
В ИТМО предложили универсальный метод проектирования адаптивных и энергоэффективных роботов
Ученые ИТМО разработали универсальный метод проектирования адаптивных и энергоэффективных роботов, которые способны перемещаться в незнакомом пространстве, безопасно взаимодействуя с окружением, объектами и людьми. Предложенный метод значительно упрощает создание робототехнических устройств. Об этом университет сообщил 31 мая 2023 года. Подробнее здесь.
Представлен робот-гуманоид, способный думать и действовать как человек
16 мая 2023 года канадская компания Sanctuary AI сообщила о разработке человекоподобного робота под названием Phoenix. Утверждается, что это первый в мире робот-гуманоид общего назначения, который способен думать и действовать как люди. Подробнее здесь.
2022
Создан первый в мире крылатый робот, который может садиться на ветку как птица
В середине декабря 2022 года создан первый в мире крылатый робот под названием орнитоптер. БПЛА весит 700 граммов, он называется Griffin. Устройство способно приземляться на ветку без каких-либо внешних команд и может выполнять такие задачи, как сбор образцов с дерева или посадка на искусственные конструкции. Он также может быть использован для дальних полетов, поскольку способен заряжаться от солнечной энергии. Подробнее здесь.
Создан первый в мире робот, который сам себя восстанавливает после повреждений
В начале декабря 2022 года ученые из Северо-Западного университета в Иллинойсе разработали робота, который может восстанавливать сам себя. Робот, который может определить, когда ему причинен вред, и затем починить себя, прежде чем продолжить движение. Подробнее здесь.
2020: Робот впервые обучился ходьбе без помощи человека. Видео
В начале марта 2020 года Google впервые представил робота, который обучился ходьбе без участия человека. Исследование, проведенное сотрудниками компании, позволило сделать важный шаг вперед в развитии робототехники. Они успешно создали четырехногого робота, который самостоятельно научился ходить вперед и назад и поворачивать влево и вправо. Работа основана на предыдущих исследованиях, во время которых ученые выяснили, как заставить робота учиться в реальном мире.
Обучение обычно выполняется в симуляции: виртуальный двойник робота существует в виртуальном двойнике среды, пока алгоритм не станет достаточно надежным. Этот подход предотвращает повреждение робота во время обучения, но также требует легко моделируемой среды. На этот раз исследователи решили отказаться моделирования и позволили роботу обучаться в реальном мире с самого начала самостоятельно. Поскольку физическая среда обеспечивала естественные колебания, робот также мог быстро адаптироваться к другим достаточно похожим средам, таким как склоны, ступени и ровная местность с препятствиями.

Google впервые представил робота, который обучился ходьбе без участия человека
Но чтобы робот мог обучаться без вмешательства человека, ему ограничивали местность исследования и заставляли тренировать одновременно несколько маневров. Исследователи также ограничили пробные движения робота, сделав его достаточно осторожным, чтобы минимизировать ущерб от повторного падения. Кроме того, робота оснастили алгоритмом, который позволял ему встать на ноги после падения.
Благодаря этим настройкам робот научился самостоятельно ходить по нескольким поверхностям, включая плоскую поверхность, матрас из вспененного материала и коврик с трещинами. Эти исследования могут лечь в основу роботов для навигации на пересеченной и неизвестной местности без присутствия человека. [4]
2017: IOActive: Взломанные роботы могут быть смертельно опасны
Исследователи из IOActive проверили [5] безопасность ряда человекоподобных роботов для дома и бизнеса, а также промышленных машин. Результаты вызвали серьезную обеспокоенность экспертов [6] .
Было обнаружено множество уязвимостей — проблемы с аутентификацией / авторизацией, незащищенная передача данных, не задокументированные функции, неизменяемые пароли, отсутствие шифрования в хранилищах данных и легко отключаемая защита человеческой безопасности. Все это может быть использовано злоумышленниками для слежки за пользователями, похищения робота, его блокировка, и, что самое ужасное, причинения вреда человеку.
Эксперты провели исследование проблем безопасности малогабаритных гуманоидных роботов от UBTech Alpha, интерактивных роботов-компаньонов малых и средних размеров от SoftBank Robotics ‘Pepper’, и индустриальных роботов от Universal Robots. Последние представляют из себя так называемые «механические руки», работающие с людьми без какого-либо физического разделения.
В сопроводительном отчете они также описали уязвимости, обнаруженные в программном обеспечении для гуманоидных роботизированных комплектов от компании ROBOTIS, системах управления роботами Asratec (работающими на V-Sido OS) и в промышленных роботах модели Baxter от Rethink Robotics.
«Поскольку роботы рассчитаны на взаимодействие преимущественно с конечными пользователями, физический доступ является вполне ожидаемым и приемлемым. Роботы для дома и бизнеса обычно взаимодействуют с членами семьи, гостями, клиентами и сотрудниками, а промышленные роботы — с рабочими на заводах. Физические атаки возможны, только если у злоумышленников есть непосредственный доступ к оборудованию», — отмечают исследователи.
У таких роботов, как правило, присутствуют открытые порты подключения, которые позволяют пользователям «играться» с их настройками через специальные USB-устройства или Ethernet-соединения. Однако есть способы, с помощью которых злоумышленники могут изменять настройки безопасности удаленно. Например, нарушение механизмов обнаружения и предотвращения столкновения может стать потенциальной причиной серьезных травм. Исследователям также удалось получить полный доступ к модели Alpha 1S от UBTech, послав поддельный образ прошивки через Bluetooth.
2016: Администрация президента США: Отчёт «Искусственный интеллект, автоматизация и экономика»
В конце года был опубликован отчёт администрации президента США «Искусственный интеллект, автоматизация и экономика» [7] , основные тезисы [8] :
- замена человека машинами на значительной части рабочих мест неизбежна. Причина элементарна (и всё чаще называется «сценарием Макдональдса» [9] : лучше всех сформулировал её один из бывших руководителей известной компании): стоимость рабочего часа человека (дорожающая непрерывно) в конце концов превысит стоимость рабочего часа робота (дешевеющую так же непрерывно) — и тогда простой здравый смысл подтолкнёт работодателей к переменам. При этом в Белом доме верят, что ИИ потенциально способен стать главным драйвером экономического роста и социального прогресса — то есть, вовсе не обязательно повлечёт только негативные последствия. Но и негативные последствия без сомнения будут.
- те предприниматели, которые сделают ставку на роботов, получат скачок производительности (ведь роботы трудятся без перерывов и выходных). Однако, в процессе перемен неизбежно возникновение сложного набора перекосов. Например, снижение спроса на рабочие руки в областях, легко поддающихся автоматизации (предполагающих повторение простых действий), будет «компенсировано» повышением спроса на специалистов, разбирающихся в роботах и ИИ. Но «компенсировано» не зря поставлено в кавычки: работники, вытесненные машинами, претендовать на образовавшиеся благодаря машинам рабочие места сразу не смогут, им не хватит квалификации. Другой перекос обусловлен тем, что на рынке станет меньше низкооплачиваемых профессий и больше высокооплачиваемых. И это само по себе таит угрозу социального взрыва. Наконец, будут перекосы по районам размещения производств (там, где роботов будет больше, сформируется специфический рынок труда) и по отраслям промышленности (где-то роботов будет применить проще, где-то — невозможно).
- предсказать, куда именно ударит автоматизация, невозможно. А значит, необходимо действовать с упреждением и по всему социально-экономическому фронту сразу. И действовать нужно агрессивно: негативные последствия автоматизации зависят не только от технологий, но и от того, предпримет ли что-нибудь государство, чтобы их компенсировать. Отсюда три стратегических рекомендации для правительства и бизнеса.
- Государству необходимо всячески способствовать исследованиям и разработкам в области роботизации и искусственного интеллекта. Это вроде бы противоречит логике (роботы и так уже вредят, так зачем их плодить?), но объясняется очень просто. Дело в том, что автоматизация наступает «с низов»: она в первую очередь высвобождает рабочие руки с мест, не требующих высокой квалификации и не связанных с производством большой добавленной стоимости, и позволяет перенаправить их на рабочие места более высокого уровня. В результате, чем больше роботов задействовано на конкретном предприятии, тем выше может быть производительность труда каждого сотрудника в среднем. Это, конечно, требует переобучения высвобождающихся сотрудников, но на то и следующий пункт.
- Расходы на образование необходимо увеличить в разы. При этом имеется в виду как переобучение работников, ставших ненужными из-за автоматизации их профессий, так и классическое образование, в том числе бесплатное среднее (с акцентом на компьютерные науки). Предполагается, что чем раньше и легче человек получит доступ к качественному образованию, тем проще ему будет повысить свою квалификацию впоследствии. Для этого в США уже действуют несколько спонсируемых государством социальных программ переобучения, но и их требуется расширять. Впрочем, конечно, спасти от последствий автоматизации удастся не всех, поэтому:
- Необходимо усилить социальную защиту. Пособия по безработице, медицина, адресная помощь нуждающимся, содействие профсоюзам — всё это давно известно, но предлагается углубить. Но упоминаются и новаторские инструменты: страхование зарплат (на случай, если работника переведут на должность с понижением оклада), экстренная помощь семьям в кризисные периоды.
- В период активной автоматизации (всё чаще называемой роботизацией) государству особенно важно заботиться о поддержании честной конкуренции. Дело тут в том, что компаниям, работающим на ниве информационных технологий (куда роботы и искусственный интеллект вполне попадают), как никому другому легко конкуренцию подавлять.
2013: NASA Valkyrie
Робот NASA Valkyrie представлен в 2013 году. Рост робота составляет 190 сантиметров, а вес — 125 килограмм. Кроме того, он крайне удобен в обслуживании. Севшую батарею можно заменить в течение нескольких минут, и также достаточно быстро можно поставить вместо повреждённой конечности новую. Кстати, левая и правая руки у Valkyrie взаимозаменяемы, так как идентичны по конструкции. И хотя в плане моторики эти роботы немного уступают произведениям Boston Dynamics и Honda Asimo, своё широкое применение они, вероятнее всего, найдут раньше.
2010: DARwin-OP
Робот DARwin-OP был представлен на конференции Humanoids 2010, отличается открытым железом и ПО. Оснащен двигателем, позволяющим ходить на двух ногах, системой зрения и автономными моделями поведения.
2008: I-SOBOT
Вышел I-SOBOT — самый крошечный серийный андроид, его рост составлял 16 см, а вес — 300 г. I-SOBOT знал 200 фраз.
2006
Анонсирован Robonova, который может бегать, кувыркаться назад и танцевать. Стоит 39 830-.
Появилось много дорогих андроидов, в том числе ZMP Nuvo. Однако его умения не оправдывали высокой цены в $6000.
2005: Seiko Epson Micro Flying Robot Helicopter
Seiko Epson Micro Flying Robot Helicopter — самый крошечный в мире летающий робот весит всего 8,9 г, у него четыре актуатора и два ротора, балансирующие в полете.
2004: Robosapien
Robosapien — робот-биоморф, управляемый посредством инфракрасного пульта. Есть 67 команд, в том числе для хватания и бросания.
2003: Sony QRIO
Представлен робот-гуманоид Sony QRIO. Увы, он не пошел в продажу, вместе с Aibo проект закрыли в 2006 году. Так и представляем, как они лежат в своих могилках.
2001: Electrolux Trilobite
Первый в мире коммерческий робот-пылесос Electrolux Trilobite. Модель Trilobite 2.0 до сих пор в продаже.
2000: Honda Asimo
Робот Honda Asimo (рост его составляет всего 130 сантиметров при весе 50 килограмм) своим именем не только созвучен с фамилией Айзека Азимова, но и, в общем-то, раскрывает общую миссию проекта. Asimo расшифровывается как — Advanced Step in Innovative MObility. Корпорация Honda работает над созданием человекоподобных роботов ещё с 1986 года, но именно эта модель стала действительно прорывной. Помимо весьма продвинутой моторики, Asimo неплохо ориентируется в обстановке, избегает столкновений с движущимися предметами, а также умеет распознавать речь, жесты и лица.
1999: Sony Aibo
Собачка Aibo (Artificial Intelligence RoBOt) от Sony стала знаковым роботом конца века. До кончины линейки в 2006 году было выпущено пять моделей.
1998: Lego Mindstorms Robotics Invention System
Lego представила Mindstorms Robotics Invention System. В оригинальном наборе Mindstorms было только два сенсора прикосновений и один сенсор света, но даже тогда это была воплощенная мечта.
1996

В 1996 году Honda создала (но не представила) P1, а вот P2, несмотря на его скучное название, получил пристальное внимание прессы. 182 см и 210 кг — самый увесистый из роботов Honda.
1994
На смену оригинальному роботу Dante, так и не сумевшему в 1993 году взять пробу газа из активного вулкана, пришел Dante II, умудрившийся все-таки совершить этот подвиг.
1993
Самый крошечный в мире робот Monsieur от Seiko Epson меньше 1 см³. Умел двигаться к источнику света. Как мило!
1981
В 1981 году на фабрике Kawasaki во время техобслуживания гидравлическая рука столкнула в дробилку Кенджи Урада.
1979
- Двенадцать лет ушло на то, чтобы научить робота Stanford Cart свободно двигаться по заставленной стульями комнате. Реализовать это удалось благодаря стереозрению машины и компьютеру, определяющему расстояние до препятствия и корректирующему маршрут.
- Первый известный случай убийства роботом произошел в 1979 году: на заводе Ford в Мичигане двадцатипятилетнего Роберт Уильямса ударила роборука.