14.12. Вращающий момент асинхронного двигателя
Выражение для вращающего момента асинхронного двигателя можно получить из формулы для механической мощности Рмех на валу двигателя:

Мвр=Рмех/р, (14.22)

где р — угловая скорость ротора.
Так как угловая скорость ротора  р = 2
р = 2 n/60, то, следовательно, связь между угловыми скоростями магнитного поля
n/60, то, следовательно, связь между угловыми скоростями магнитного поля  п двигателя и ротора
п двигателя и ротора  р определяется скольжением
р определяется скольжением
S = (n1 — n)/п1 =(  п —
п — р )/
р )/  п,
п,
 p =
p =  п (l—s).
п (l—s).

Угловая скорость вращающегося магнитного поля п равна угловой частоте синусоидального тока в фазных обмотках статора со для двухполюсного двигателя (р = 1). В общем случае многополюсного двигателя угловая скорость магнитного поля равна:
 п=
п=  /p,
/p,
где р — число пар полюсов.
Подставив в (14.22) выражение  p через
p через  , получим:
, получим:
Мвр =Pмех. (14.23)
Из анализа схемы замещения фазы двигателя (рис. 14.19) известно, что механическая мощность на валу равна:
Pмех = 3r’2(I’2) 2 =3r’B2 (I’2) 2 =rB2m2
(I’2) 2 =rB2m2 I 2 2 (14.24)
I 2 2 (14.24)
Подставив значение механической мощности на валу двигателя из (14.24) в (14.23), получим выражение вращающего момента:

Мвр =m2prB2I 2 2/s, (14.25)
а так как rB2I2 = E2 cos ф2 на основании векторной диаграммы фазы ротора (рис. 14.15), a E/s = E2H, то, следовательно,

Мвр = E2нI2соsф2. (14.26)
Чтобы ввести в выражение момента на валу (14.26) значение магнитного потока вращающегося поля, заменим согласно (14.12)
E2н= 4,44fw26kо62Фв =  w2 kоб2Фв/
w2 kоб2Фв/ и получим:
и получим:

Мвр = m2рw2kоб2ФвI2 cos ф2 = const ФвI2 cos ф2, (14.27)
т. е. вращающий момент двигателя пропорционален произведению потока вращающегося магнитного поля и тока в обмотке ротора.
14.13. Механическая характеристика асинхронного двигателя
Для устойчивой работы двигателя важно, чтобы автоматически устанавливалось равновесие вращающего и тормозного моментов; с увеличением нагрузки на валу двигателя должен соответственно возрастать и вращающий момент. Это уравновешивание у работающего асинхронного двигателя осуществляется следующим образом: при увеличении нагрузки на валу тормозной момент оказывается больше вращающего момента, вследствие чего частота вращения ротора уменьшается — скольжение возрастает. Повышение скольжения вызывает увеличение вращающего момента, и равновесие моментов восстанавливается при возросшем скольжении.
Однако зависимость вращающего момента от скольжения довольно сложна.
Действительно, в уравнении вращающего момента (14.27) все три величины I2, Фв и cos ф зависят от скольжения.
Ток ротора I2 (см. § 14.7) с возрастанием скольжения быстро увеличивается вследствие увеличения ЭДС E2, пропорциональной скольжению. Сначала, пока индуктивное сопротивление рассеяния обмотки ротора s Lpac2 мало по сравнению с ее активным сопротивлением rв2, значение тока при увеличении скольжения возрастает быстро, а затем, когда s
Lpac2 мало по сравнению с ее активным сопротивлением rв2, значение тока при увеличении скольжения возрастает быстро, а затем, когда s Lpac2 = rв2, все медленнее.
Lpac2 = rв2, все медленнее.
Коэффициент мощности цепи ротора

cos ф2 = rs2/
вследствие возрастания скольжения уменьшается сначала медленно, а потом все быстрее. Полезно пояснить физические условия, определяющие влияние cos ф2 на вращающий момент.

Для этого достаточно обратиться к крайним идеальным условиям — предположить, что cos ф2 = 0, т. е. принять, что обмотка ротора обладает только индуктивным сопротивлением. В таких условиях токи в обмотке ротора будут иметь наибольшее значение в тех проводниках ротора, в месте расположения которых индукция была максимальной четверть периода тому назад (рис. 14.21). Ток будет иметь максимальное значение там, где индукция вращающегося магнитного поля отсутствует, а силы, действующие на остальные провода ротора, будут взаимно уравновешиваться и вращающий момент на валу двигателя будет равен нулю.
В реальных условиях асинхронного двигателя цепь ротора обладает как активным, так и индуктивным сопротивлением, причем последнее изменяется пропорционально скольжению, что соответственно сказывается на вращающем моменте машины.
Влияние скольжения сказывается и на главном потоке машины ФB хотя и в меньшей мере. С увеличением скольжения возрастает ток I; статора, а следовательно, уменьшается ЭДС
 1 =
1 = 1 — Zo61I1
1 — Zo61I1
и пропорциональный ей магнитный поток Фв, так как (14.10)
Фв = E1/4,44fkо61.
В выражении момента (14.27) три величины зависят от скольжения, причем одна из них I2 увеличивается с ростом скольжения, а две другие — Фв и cos ф2 убывают. Следовательно, определенному значению скольжения, называемому критическим скольжением skp, должно соответствовать максимальное значение вращающего момента. Чтобы определить условия максимума момента на валу через параметры машины, обратимся к выражению момента (14.25), в котором I2 определим из схемы замещения фазы статора (рис. 14.19) без учета тока холостого хода I1х:
Mвр=
 (14.28)
(14.28)
Возьмем первую производную от выражения вращающего момента (14.28) по скольжению и приравняем ее нулю:
 =
=  U
U r ’ B2
r ’ B2 
Нулю может быть равен только числитель этого выражения, следовательно, критическое скольжение, соответствующее максимуму момента, будет:

здесь знак минус относится к работе машины в режиме генератора. Так как у машин значение r 2 в1 составляет не более 5 % значения подкоренного выражения, то можно этой величиной пренебречь и считать, что критическое скольжение, выраженное через приведенные параметры цепи ротора, будет:
sKp = ±r‘B2/(xpac,1 + x‘pac2). (14.30)
Если заменим r‘B2= krB2; x‘pac2 = kxpacc2; xpacl/k = x”pacl, то получим выражение sKp через роторные сопротивления rв2, xрас2 и xpacl — индуктивное сопротивление рассеяния фазной обмотки статора, приведенное к числу фаз, витков и обмоточному коэффициенту ротора:

Индуктивность рассеяния обмоток ротора относительно велика, так как проводники лежат в пазах сердечника; поэтому максимальный момент двигателя обычно соответствует весьма небольшим скольжениям, а именно 4 % у двигателей большой мощности и до 14 % у двигателей малой мощности.
Характерный график зависимости вращающего момент двигателя от скольжения показан на рис. 14.22. Максимум вращающего момента разделяет график вращающего момента на устойчивую часть от s = 0 до sKp и неустойчивую часть — от sKp до s = 1, в пределах которой вращающий момент уменьшается с ростом скольжения.
У работающего двигателя динамическое равновесие моментов автоматически восстанавливается при увеличении скольжения, пока тормозной момент на валу меньше максимального момента двигателя. Но когда тормозной момент достиг значения максимального момента двигателя, тогда при дальнейшем увеличении нагрузки возрастание скольжения будет лишь уменьшать вращающий момент: таким образом, динамическое равновесие, нарушенное увеличением нагрузки, не восстанавливается и вследствие преобладания тормозного момента двигатель останавливается.
Выразим теперь максимальный вращающий момент через параметры машины; для этого подставим выражение критического скольжения (14.30) в уравнение момента (14.28).
Пренебрегая значением величины лв1 по сравнению со значением величины (храс1 + х’расг), получим выражение максимального момента асинхронного двигателя в следующей простой форме:
Mmax=
 .
.
Максимальный момент определяет перегрузочную способность асинхронного двигателя. Выражение (14.32) показывает, что Мтах не зависит от активного сопротивления цепи ротора, в то же время согласно (14.30) и (14.31) критическое скольжение пропорционально этому сопротивлению. Следовательно, можно, увеличивая активное сопротивление цепи ротора, увеличивать критическое скольжение, не изменяя максимальный момент. Это используется для улучшения пусковых условий в двигателях с фазным ротором.

То обстоятельство, что максимальный вращающий момент пропорционален U 2 1, делает асинхронный двигатель весьма чувствительным к снижению напряжения питающей его сети. При значительном снижении U1 вращение двигателя при пуске в ход может не начаться.
У нормальных асинхронных двигателей максимальный момент больше номинального в 2—2,5 раза.
Для целей электропривода большое значение имеет зависимость частоты вращения двигателя от нагрузки на валу п (М); эта зависимость носит название механической характеристики. По своей форме она отличается от кривой Мвр (s) только положением по отношению к координатным осям.
Как показывает кривая рис. 14.23, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении вращающего момента в пределах от нуля до максимального значения, т. е. механическая характеристика двигателя в этом случае жесткая.
При перегрузке свыше максимального момента Мтах (что составляет примерно двух-, трехкратную перегрузку) двигатель входит в область неустойчивого режима (если тормозной момент на валу постоянен) и останавливается. Это обстоятельство вынуждает выбирать мощность двигателя так, чтобы даже при кратковременной перегрузке не был превышен максимальный момент; в противном случае привод должен быть снабжен соответствующим маховиком.
Механическая характеристика, относящаяся к нормальным рабочим условиям машины, называется естественной механической характеристикой в отличие от искусственной механической характеристики, какой является, например, характеристика двигателя с фазным ротором, когда в цепь ротора включен реостат.
Скольжение асинхронного двигателя
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n 1 — n 2 ) / n 1, где n 1 — синхронная скорость вращения поля, об/мин, n2 — скорость вращения ротора асинхронного двигателя, об/мин. При работе с номинальной нагрузкой скольжение обычно мало, так для электродвигателя, например, с n 1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно: s = ((1500 — 1460) / 1500) х 100 = 2,7%

Асинхронный двигатель не может достичь синхронной скорости вращения даже три отсоединенном механизме, так как при ней проводники ротора не будут пересекаться магнитным полем, в них не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
В начальный момент пуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя : f2 = s х f1, где f1 — частота тока, подводимого к статору.
Сопротивление ротора зависит от частоты тока в нем, причем чем больше частота, тем больше его индуктивное сопротивление. С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
При пуске асинхронных двигателей коэффициент мощности поэтому значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 — 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до s н ом в 5-7 раз по отношению к начальному значению при пуске.
Ток по величине изменяется обратно пропорционально изменению эквивалентного сопротивления Таким образом, при пуске до скольжения порядка 0,15 ток опадает незначительно, а в дальнейшем быстро уменьшается.
Момент вращения электродвигателя определяется величиной магнитного потока, током и угловым сдвигом между ЭДС и током в роторе. Каждая из этих величин в свою очередь зависит от скольжения, поэтому для исследования рабочих характеристик асинхронных двигателей устанавливается зависимость момента от скольжения и влияния на него подводимого напряжения и частоты.
Момент вращения может быть также определен по электромагнитной мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и обратно пропорциональная квадрату частоты.

Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
З начения момента для номинального напряжения приводятся в каталогах для электрических машин. Знание минимального момента необходимо при расчете допустимости пуска или самозапуска механизма с полной нагрузкой механизма. Поэтому его значение для конкретных расчетов должно быть либо определено, либо получено от завода-поставщика.
Величина максимального значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не зависит от величины сопротивления ротора.
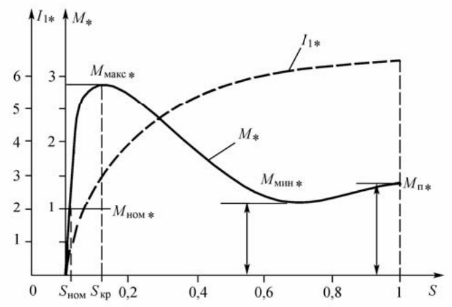
Зависимость тока и момента от скольжения
Критическое скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обусловлено активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Увеличение только активного сопротивления ротора сопровождается увеличением критического скольжения и перемещением максимума момента в область более высоких скольжений (меньшей скорости вращения). Таким путем может быть достигнуто изменение характеристик моментов.
Изменение скольжения возможно увеличением сопротивления цени ротора или потока. Первый вариант осуществим только для асинхронных двигателей с фазным ротором (от S = 1 до S = Sном ) , но не экономичен. Второй вариант осуществим при изменении питающего напряжения, но только в сторону уменьшения. Диапазон регулирования мал, так как S возрастает, но одновременно уменьшается перегрузочная способность асинхронного двигателя. По экономичности оба варианта, примерно, равноценны.
В асинхронных двига т елях с фазным ротором изменение момента при различных скольжениях осуществляется с помощью сопротивления, вводимого в цепь обмотки ротора. В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто за счет применения двигателей с переменными параметрами или с помощью частотных преобразователей .
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Чему равен вращающий момент асинхронного двигателя если скольжение ротора равно нулю
Работа асинхронного двигателя под нагрузкой .
В рабочем режиме ротор двигателя вращается с частотой n 2 , меньшей частоты n 1 магнитного поля статора, вращающегося в том же направлении, что и ротор.
Поэтому магнитное поле, имеющее большую частоту, скользит относительно ротора с частотой (об/мин), равной разности частот поля и ротора, т. е. ns = n 1 — n 2 .
Относительное отставание ротора от вращающегося магнитного поля статора характеризуется скольжением S .
Скольжение представляет собой отношение разности частот вращения магнитного поля статора и вращающегося ротора к частоте поля статора
S = ns/n 1 = (n 1 — n 2 )/n 1 .
Эта формула определяет скольжение в относительных единицах.Скольжение может быть также выражено в процентах:
S = ((n 1 — n 2 )/n 1 ) x 100% .
Если ротор неподвижен ( n 2 = 0 ), то скольжение равно единице или 100%.
Если ротор вращается синхронно с магнитным полем, т. е. с одинаковой частотой
( n 2 = n 1 ), то скольжение равно нулю.
Таким образом, чем больше частота вращения ротора, тем меньше скольжение.
В рабочем режиме асинхронного двигателя скольжение мало.
У современных асинхронных двигателей скольжение при полной нагрузке составляет 3—5%, т.е. ротор вращается с частотой, незначительно отличающейся от частоты магнитного поля статора.
При холостом ходе, т. е. при отсутствии нагрузки на валу, скольжение ничтожно мало и может быть принято равным нулю.
Частоту вращения ротора можно определить из следующих соотношений:
n 2 = n 1 — ns = n 1 (1 — S) = (60f 1 /p)(1 — S) .
Двигатель будет работать устойчиво с постоянной частотой вращения ротора при равновесии моментов, т. е. если вращающий двигателя М будет равен тормозному моменту на валу двигателя Мт , который развивает приемник механической энергии, например резец токарного станка. Следовательно, можно записать: М = Мт .
Любой нагрузке машины соответствует определенная частота вращения ротора n 2 и определенное скольжение S .
Магнитное поле статора вращается относительно ротора с частотой ns и индуктирует в его обмотке эдс Е 2 , под действием которой по замкнутой обмотке ротора проходит ток I 2 .
Если нагрузка на валу машины увеличилась, т. е. возрос тормозной момент, то равновесие моментов будет нарушено, так как тормозной момент окажется больше вращающего.
Это приведёт к уменьшению частоты вращения ротора, а следовательно, к увеличению скольжения. С увеличением скольжения магнитное поле будет пересекать проводники обмотки ротора чаще, эдс E 2 , индуктированная в обмотке ротора, возрастет, а в результате как ток в роторе, так и развиваемый двигателем вращающий момент.
Скольжение и ток в роторе будут увеличиваться до значений, при которых вновь наступит равновесие моментов, т. е. вращающий момент станет равным тормозному.
Так же протекает процесс изменения частоты вращения ротора и развиваемого момента при уменьшении нагрузки двигателя. С уменьшением нагрузки на валу двигателя тормозной момент становится меньше вращающего, что приводит к увеличению частоты вращения ротора или к уменьшению скольжения.
В результате уменьшаются эдс и ток в обмотке ротора, а следовательно, и вращающий момент, который вновь становится равным тормозному моменту.
Магнитное поле статора пересекает проводники обмотки статора и индуктирует в ней эдс Е1 , которая уравновешивает приложенное напряжение сети U 1 .
Если пренебречь падением напряжения в сопротивлении обмотки статора, которое мало по сравнению с эдс, то между абсолютными значениями приложенного напряжения и эдс обмотки статора можно допустить приближенное равенство, т. е.
U 1 = E 1 .
Таким образом, при неизменном напряжении сети будет неизменна и эдс обмотки статора. Следовательно, магнитный поток в воздушном зазоре машины, так же как в трансформаторе, при любом изменении нагрузки остается примерно постоянным.
Ток обмотки ротора создает свое магнитное поле, которое направлено противоположно магнитному полю тока обмотки статора. Чтобы результирующий магнитный поток в машине оставался неизменным при любом изменении нагрузки двигателя, размагничивающее магнитное поле обмотки ротора должно быть уравновешено магнитным полем обмотки статора. Поэтому при увеличении тока в обмотке ротора увеличивается и ток в обмотке статора.
Таким образом, асинхронный двигатель подобен трансформатору, у которого при увеличении тока во вторичной обмотке увеличивается ток в первичной обмотке.
Вращающий момент асинхронного двигателя.
Вращающий момент асинхронного двигателя создается при взаимодействии вращающегося магнитного поля статора с токами в проводниках обмотки ротора. Поэтому вращающий момент зависит как от магнитного потока статора Фm , так и от тока в обмотке ротора I 2 .
Однако в процессе преобразования энергии (создании вращающего момента) участвует только активная мощность, потребляемая машиной из сети. Вследствие этого вращающий момент зависит не от тока в обмотке ротора I 2 , а только от его активной составляющей, т. е. I 2 X cos 2 , где 2 — фазный угол между эдс и током в обмотке ротора.
Таким образом, вращающий момент асинхронного двигателя определяется следующим выражением:
М = С Ф m I 2 cos 2 ,
где С — конструктивная постоянная машины, зависящая от числа ее полюсов и фаз, числа витков обмотки статора и конструктивного выполнения обмотки.
При условии постоянства приложенного напряжения магнитный поток остается также почти постоянным при любом изменении нагрузки двигателя.
Таким образом, в выражении вращающего момента величины Фm и С постоянны и вращающий момент пропорционален только активной составляющей тока в обмотке ротора, т. е. M ~ I 2 cos 2 .
Изменение нагрузки или тормозного момента на валу двигателя изменяет частоту вращения ротора и скольжение, что вызовет изменение как тока в роторе I 2 , так и его активной составляющей I 2 cos 2 .
Можно ток в роторе определить отношением эдс к полному сопротивлению, т. е.
I 2 = E 2 /Z 2 = E 2 /(R + X) и cos 2 = R 2 /(R + X) ,
где Z 2 , R 2 и X 2 — полное, активное и реактивное сопротивления фазы обмотки ротора.
Вместе со скольжением изменяется частота тока ротора.
При неподвижном роторе ( n 2 = 0 и S = 1 ) вращающееся поле с одинаковой частотой пересекает проводники обмотки статора и ротора и частота тока в роторе равна частоте тока в сети ( f 2 = f 1 ).
При уменьшении скольжения обмотка ротора пересекается магнитным полем с меньшей частотой, так что частота тока в роторе уменьшается. Когда ротор вращается синхронно с полем ( n 2 = n 1 и S = 0 ), проводники обмотки ротора не пересекаются магнитным полем, так что частота тока в роторе равна нулю f 2 = 0 . Таким образом, частота тока в роторе пропорциональна скольжению, т. е. f 2 = Sf 1 .
Активное сопротивление обмотки ротора почти не зависит от частоты, тогда как эдс и реактивное сопротивление пропорциональны частоте, т. е. изменяются с изменением скольжения, и могут быть определены следующими выражениями:
E 2 = SE и X 2 = SX ,
где Е и X — соответственно эдс и индуктивное conpoтивление фазы обмотки неподвижного ротора. Таким образом, имеем:
I 2 = SE/(R + (SX)) и cos 2 = R 2 /(R + (SX))
и вращающий момент
M I 2 cos 2 = SER 2 /(R + (SX))
Зависимость вращающего момента
асинхронного двигателя от скольжения
Следовательно, при небольших скольжениях (примерно до 20%), когда SX мало по сравнению с R 2 , увеличение скольжения вызывает повышение вращающего момента, так как при этом возрастает активная составляющая тока в роторе ( I 2 cos 2 ).
При больших скольжениях ( SX>R 2 ) увеличение скольжения будет вызывать уменьшение вращающего момента.
Таким образом, хотя и возрастает ток в роторе I 2 , но его активная составляющая I 2 cos 2 и, следовательно, вращающий момент уменьшатся вследствие значительного повышения реактивного сопротивления обмотки ротора.
На изо показана зависимость вращающего момента от скольжения.
При некотором скольжении S m (примерно 20%) двигатель развивает максимальный момент, который определяет перегрузочную способность двигателя и обычно в 2 — 3 раза превышает номинальный момент.
Устойчивая работа двигателя возможна только на восходящей ветви кривой зависимости момента от скольжения, т. е при изменении скольжения в пределах от 0 до S m . Работа двигателя на нисходящей ветви указанной зависимости, т. е. при скольжении S > S m невозможна, так как не обеспечивается устойчивое равновесие моментов.
Если предположить, что вращающий момент был равен тормозному ( M = М Т ) в точках А и Б , то при случайном нарушении равновесия моментов в одном случае оно восстанавливается, а в другом не восстанавливается.
Допустим, что вращающий момент двигателя почему-либо уменьшился (например, при понижении напряжения сети), тогда скольжение начнет увеличиваться.
Если равновесие моментов было в точке A , то увеличение скольжения вызовет увеличение вращающего момента двигателя и он станет вновь равным тормозному моменту, т. е. равновесие моментов восстановится.
Если же равновесие моментов было в точке Б , то увеличение скольжения вызовет уменьшение вращающего момента, который будет оставаться всегда меньше тормозного, т. е. равновесие моментов не восстановится и частота вращения ротора будет непрерывно уменьшаться до полной остановки двигателя.
Если приложить к валу двигателя тормозной момент, больший максимального момента, то равновесие моментов нарушится и ротор двигателя остановится.
Вращающий момент двигателя пропорционален квадрату приложенного напряжения, так как пропорциональны напряжению как магнитный поток, так и ток в роторе. Поэтому изменение напряжения в сети вызывает значительное изменение вращающего момента.
Рабочие характеристики асинхронного двигателя .
Рабочие характеристики асинхронного двигателя представляют собой зависимости скольжения S , частоты вращения ротора n2 , развиваемого момента М , потребляемого тока I1 , расходуемой мощности P1 , коэффициента мощности cos и кпд от полезной мощности Р2 на валу машины. Эти характеристики (изо) снимаются при естественных условиях работы двигателя, т. е. двигатель нерегулируемый, частота тока f1 и напряжение U1 сети остаются постоянными, а , изменяется только нагрузка на валу двигателя.
При увеличении нагрузки на валу двигателя скольжение возрастает, причем при больших нагрузках скольжение увеличивается несколько быстрее, чем при малых.
При холостом ходе двигателя скольжение очень мало ( n2 ~ n1 или S ~ 0 ).
При номинальной нагрузке скольжение обычно составляет S = 3 — 5% (0,95) .
Частота вращения ротора n2 = n1(1—S) = (60f1/p)(1 — S) .
При увеличении нагрузки на валу двигателя скольжение возрастает, а частота вращения будет уменьшаться. Однако изменение частоты вращения при увеличении нагрузки от 0 до номинальной очень не значительно и не превышает 5 % . Поэтому скоростная характеристика асинхронного двигателя является жесткой — она имеет очень малый наклон к горизонтальной оси.
Вращающий момент М , развиваемый двигателем, уравновешен тормозным моментом Мт на валу и моментом Мо , идущим на преодоление механических потерь, т. е.
М = Мт + М0 = Р2/2—М0 , где Р2 — полезная мощность двигателя, 2 — угловая скорость ротора.
При холостом ходе двигателя М = М0 ; с увеличением нагрузки на валу вращающий момент также увеличивается, причем за счет некоторого уменьшения частоты вращения ротора увеличение вращающего момента происходит быстрее, чем увеличение полезной мощности на валу.
Рабочие характеристики асинхронного двигателя
Ток I1 , потребляемый двигателем из сети, неравномерно изменяется с увеличением нагрузки на валу двигателя.
При холостом ходе cos мал и ток имеет большую реактивную составляющую.
При малых нагрузках на валу двигателя активная составляющая статора меньше реактивной составляющей, поэтому активная составляющая тока незначительно влияет на ток I1 , определяющийся в основном реактивной составляющей.
При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает большое изменение тока I1 .
Графически зависимость потребляемой двигателем мощности Р1 выражается прямой линией, незначительно отклоняющейся вверх от прямой при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с возрастанием нагрузки.
Коэффициент мощности изменяется в зависимости от нагрузки на валу двигателя следующим образом. При холостом ходе cos мал (порядка 0,2 ), так как активная составляющая тока статора обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток.
При увеличении нагрузки на валу cos возрастает (достигая наибольшего значения 0,8—0,95 ) в результате увеличения активной составляющей тока статора.
При очень больших нагрузках происходит некоторое уменьшение cos , так как вследствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая кпд имеет такой же вид, как в любой машине или трансформаторе. При холостом ходе кпд равен нулю. С увеличением нагрузки на валу двигателя кпд резко увеличивается, а затем уменьшается. Наибольшего значения кпд достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потерям мощности в обмотках статора и ротора, зависящим от нагрузки.
Чему равен вращающий момент асинхронного двигателя, если скольжение его ротора равно 1
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
S = ((n1 — n2)/n1) x 100%.
Если ротор неподвижен (n2 = 0), то скольжение равно единице или 100%.
Если ротор вращается синхронно с магнитным полем, т. е. с одинаковой частотой
(n2 = n1), то скольжение равно нулю.