Замкнутые схемы управления эп
Замкнутые структуры ЭП применяются в тех случаях, когда требуется обеспечить движение исполнительных органов рабочих машин с высокими показателями — большими диапазоном регулирования скорости и точностью ее поддержания, заданным качеством переходных процессов и точностью остановки, а так высокой экономичностью или оптимальным функционированием технологического оборудования и самого ЭП. Основным признаком замкнутых структур является такое автоматическое управление ЭП, при котором ЭП наилучшим образом выполняет свои функции при всевозможных управляющих и внешних возмущениях, действующих на рабочую машину или ЭП.
Замкнутые структуры ЭП строятся по принципам компенсации возмущения и отклонения, называемому также принципом обратной связи. Рассмотрим принцип компенсации наиболее характерного внешнего возмущения ЭП, момента нагрузки  при регулировании скорости w. Основным признаком замкнутой структуры ЭП является наличие цепи, по которой на вход ЭП (рис. 11.1,я) вместе с задающим сигналом скорости
при регулировании скорости w. Основным признаком замкнутой структуры ЭП является наличие цепи, по которой на вход ЭП (рис. 11.1,я) вместе с задающим сигналом скорости  подается сигнал
подается сигнал  пропорциональный моменту нагрузки
пропорциональный моменту нагрузки  , В результате этого управление ЭП осуществляется суммарным сигналом
, В результате этого управление ЭП осуществляется суммарным сигналом  , который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости ЭП на заданном уровне.
, который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости ЭП на заданном уровне.
Несмотря на свою эффективность, ЭП по схеме рис. 11.1, а выполняются редко из-за отсутствия простых и надежных датчиков момента нагрузки Мс (возмущающего воздействия).
В связи с таким положением подавляющее большинство замкнутых структур электропривода строятся по принципу отклонения (обратной связи). Он характеризуется наличием цепи обратной связи, соединяющей выход ЭП с его входом, откуда и пошло название замкнутых схем. Применительно к рассматриваемому примеру регулирования скорости признаком этой структуры является цепь, обратной связи (рис. 11,1,б), по которой информация о текущем значении скорости подается на вход ЭП, где он вычитается из сигнала задания скорости  . Управление ЭП осуществляется сигналом отклонения
. Управление ЭП осуществляется сигналом отклонения  . Этот сигнал при отличии скорости от заданного уровня автоматически изменяется необходимым образом и устраняет с помощью системы управления ЭП эти отклонения. Тем самым управление движением осуществляется с учетом его результата.
. Этот сигнал при отличии скорости от заданного уровня автоматически изменяется необходимым образом и устраняет с помощью системы управления ЭП эти отклонения. Тем самым управление движением осуществляется с учетом его результата.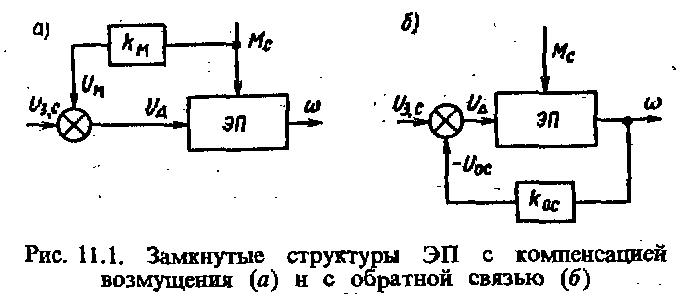
Схемы замкнутых структур электропривода
Замкнутые структуры ЭП строятся по принципам компенсации возмущения и отклонения, называемому также принципом обратной связи. Рассмотрим принцип компенсации наиболее характерного внешнего возмущения ЭП, момента нагрузки  при регулировании скорости w. Основным признаком замкнутой структуры ЭП является наличие цепи, по которой на вход ЭП (рис. 11.1,я) вместе с задающим сигналом скорости
при регулировании скорости w. Основным признаком замкнутой структуры ЭП является наличие цепи, по которой на вход ЭП (рис. 11.1,я) вместе с задающим сигналом скорости  подается сигнал
подается сигнал  пропорциональный моменту нагрузки
пропорциональный моменту нагрузки  , В результате этого управление ЭП осуществляется суммарным сигналом
, В результате этого управление ЭП осуществляется суммарным сигналом  , который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости ЭП на заданном уровне.
, который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости ЭП на заданном уровне.
Несмотря на свою эффективность, ЭП по схеме рис. 11.1, а выполняются редко из-за отсутствия простых и надежных датчиков момента нагрузки Мс (возмущающего воздействия).
В связи с таким положением подавляющее большинство замкнутых структур электропривода строятся по принципу отклонения (обратной связи). Он характеризуется наличием цепи обратной связи, соединяющей выход ЭП с его входом, откуда и пошло название замкнутых схем. Применительно к рассматриваемому примеру регулирования скорости признаком этой структуры является цепь, обратной связи (рис. 11,1,б), по которой информация о текущем значении скорости подается на вход ЭП, где он вычитается из сигнала задания скорости  . Управление ЭП осуществляется сигналом отклонения
. Управление ЭП осуществляется сигналом отклонения  . Этот сигнал при отличии скорости от заданного уровня автоматически изменяется необходимым образом и устраняет с помощью системы управления ЭП эти отклонения. Тем самым управление движением осуществляется с учетом его результата.
. Этот сигнал при отличии скорости от заданного уровня автоматически изменяется необходимым образом и устраняет с помощью системы управления ЭП эти отклонения. Тем самым управление движением осуществляется с учетом его результата.
Схема с общим усилителем (рис. 11.3). Принятые на схеме обозначения элементов соответствуют общей схеме ЭП рис. 1.1, за исключением электродвигателя, представленного для удобства анализа в виде двух частей—электрической ЭЧД и механической МЧД. Схема обеспечивает регулирование двух координат ЭП—скорости и тока (момента). В этой схеме сигналы обратных связей по току  и скорости
и скорости  подаются на ввод управляющего устройства YY вместе с задающим сигналом скорости
подаются на ввод управляющего устройства YY вместе с задающим сигналом скорости  где алгебраически суммируются со своими знаками. Схема отличается простотой реализации, но не позволяет регулировать координаты ЭП независимо друг от друга. В этой схеме за счет использования нелинейных обратных связей, называемых в теории ЭП отсечками, удается в некотором диапазоне изменения координат осуществлять их независимое регулирование, что частично устраняет указанный недостаток.
где алгебраически суммируются со своими знаками. Схема отличается простотой реализации, но не позволяет регулировать координаты ЭП независимо друг от друга. В этой схеме за счет использования нелинейных обратных связей, называемых в теории ЭП отсечками, удается в некотором диапазоне изменения координат осуществлять их независимое регулирование, что частично устраняет указанный недостаток.
9. Схемы управления
Все замкнутые системы при любых способах управления (и при организации самоуправления) строятся на основе одной из следующих схем управления* и (или) их сочетании в объемлющей замкнутой системе. Разные схемы (не способы) управления обеспечивают для одних и тех же объектов в одних и тех же условиях различную гибкость реагирования на возмущающие воздействия и различный максимально достижимый уровень качества управления. Будучи реализованы на одних и тех же объектах, они обеспечивают им разные запасы устойчивости управления. Схемы управления отличаются одна от другой распределением по компонентам замкнутой системы полной функции управления.
* Нами используются термины типа «схема управления», а не типа «принцип управления», употребительные в технических вариациях теории управления, потому что подразумевается схема архитектуры структуры, осуществляющей процесс управления. А одни и те же «принципы управления» могут быть реализованы на основе различных схем управления.
Структура, реализующая схему управления, может быть полностью размещена на объекте, либо какие-то её элементы могут быть размещены вне управляемого объекта по разным причинам. Частным случаем такого варианта является дистанционное управление, когда на объекте размещены преимущественно исполнительные элементы структуры, которые не жалко потерять или которые заведомо невозможно сохранить. Последнее часто имеет место по отношению к команде политиков, изображающих реальную власть, а также при употреблении роботов в опасной обстановке (хотя в толпо-«элитарном» обществе политики редко не представляют собой роботов — биороботов).
Программное управление
Внешние обратные связи после включения схемы в процесс управления в замкнутой системе отсутствуют: текущая информация о состоянии внешней среды и положении объекта в ней в системе управления не используется.
Управляющий сигнал является функцией времени и, возможно, информации, поступающей по каналам внутренних обратных связей. Учёт влияния на поведение объекта всех возмущающих воздействий производится на стадии проектирования и создания объекта и (или) системы управления им и программы управления. Уровень максимально возможного качества управления является функцией соответствия программы управления реальным условиям её реализации, поскольку замкнутая система не реагирует на реальное воздействие внешней среды. Гибкость поведения отсутствует.
Программно-адаптивное управление
Внешние обратные связи в системе есть. Управляющий сигнал является функцией реальных параметров внешней среды и замкнутой системы, информация о которых поступает по цепям внешних и внутренних обратных связей. Но в то же время управляющий сигнал является и однозначной функцией программы (закона управления) в том смысле, что одинаковой информации, поступающей по цепям обратных связей, всегда соответствует один и тот же управляющий сигнал. Эту тождественность реакции «вход — выход» можно понимать и в смысле соответствия статистических характеристик управляющего сигнала информации, поступающей по цепям обратных связей. Реакция системы на возмущение до некоторой степени гибкая в том смысле, что управляющий сигнал и реакция замкнутой системы на возмущения — функция этих возмущений.
Программно адаптивная схема может реализовывать разные принципы управления. Отметим два наиболее часто встречающихся: управление по возмущению, и управление по отклонению. В первом случае система управления вырабатывает управляющий сигнал на основе измерения в процессе управления возмущающего непосредственно воздействия. Во втором случае система управления вырабатывает управляющий сигнал на основе измерения контрольных параметров и оценки их отклонений от значений, характеризующих идеальный режим управления. При необходимости оба принципа могут сочетаться в одной и той же системе управления.
Предположим, что мы проектируем систему автоматического управления температурным режимом в помещении. Мы можем построить её так, что обогреватели будут включаться в результате регистрации системой падения температуры в помещении ниже заданного значения. Это будет реализацией принципа управления по отклонению. Но мы можем построить систему такого назначения и иначе. Поскольку температура в помещении обычно падает после того, как снизится среднесуточная температура наружного воздуха, остынут стены помещения и в него попадёт холодный наружный воздух, то мы имеем возможность регистрировать температуру наружного воздуха, вычислять среднесуточную температуру, и, не дожидаясь того момента, когда стены остынут и начнётся снижение температуры в помещении, давать команду на включение обогревателя в каком-то режиме немедленно в случае снижения среднесуточной температуры до заданного порогового значения. Кроме того, режим функционирования обогревателя может быть функцией разницы среднесуточной наружной температуры и текущего значения температуры в помещении. В последнем варианте в программно-адаптивной схеме управления будут сочетаться оба принципа управления — по возмущению и по отклонению.
Если нет возможности измерять контрольный параметр непосредственно в процессе управления (то есть в отношении него разорваны внешние и внутренние обратные связи), то в таком случае вместо не поддающегося непосредственному измерению значения контрольного параметра может быть использована его косвенная оценка на основе его производных, интегральных и иным образом информационно с ним связанных параметров, которые измеряются непосредственно. Однако в этом случае программно-адаптивное управление имеет свойство неограниченно накапливать с течением времени ошибку рассогласования по контрольному параметру. Причина неограниченного накопления ошибки управления по контрольному параметру — накопление ошибок измерения и преобразования измеренных величин в процессе косвенной оценки необходимой характеристики.
Примерами такого рода ошибок полна летопись морских катастроф, когда навигаторы, не видя берега в течение многих недель, из-за плохой погоды не видя звёзд, вынуждены были определять место корабля по счислению (на основе расчётов), и из-за ошибок в измерении скорости хода, ошибок в оценке влияния ветра и течений, неточности хода корабельных хронометров (часов) и ошибочного показания компасов теряли точные координаты (место) и гибли на камнях, которые по их расчётам должны были находиться за много миль от них. Таков же механизм накопления ошибок инерциальными навигационными системами, употребляемыми в ракетно-космической технике, на подводных лодках и системах оружия, в которых текущие координаты объекта определяются на основе ввода исходных координат, измерения ускорений и их двукратного интегрирования.
Качество управления при употреблении программной схемы ниже в сопоставлении с программно-адаптивной при одинаковой алгоритмике моделирования поведения объекта, положен-ной в основу формирования управляющего сигнала. Но и возможное качество управления при программно-адаптивной схеме может оказаться ниже минимально необходимого уровня в сложившихся условиях.
Допустим, что в какой-то момент времени вектор ошибки управления равен нулю. Но в какой-то момент времени, даже в тот же самый, замкнутая система будет подвергаться ненулевому возмущающему воздействию. Если бы в состав замкнутой системы входила идеальная система управления, то она формировала бы управляющий сигнал так, что управляющее воздействие в каждый момент времени в точности компенсировало бы возмущающее воздействие, вследствие чего вектор ошибки управления сохранял бы своё нулевое значение неограниченно долгое время.
Но в большинстве случаев возмущающее воздействие прямому измерению не поддаётся. Но даже если что-то и возможно измерить, то существует порог чувствительности средств измерения величин всех факторов, на основе информации о которых формируется управляющий сигнал. Информация при передаче искажается в некоторых пределах в самой системе. Системе управления требуется время на формирование и передачу управляющего сигнала. Средства управления также обладают ограниченным быстродействием. Сам объект управления обладает характеристиками инерции, и ему необходимо время, чтобы отреагировать на возмущающее воздействие, в результате чего возмущенное движение объекта также успевает набрать инерцию и требуется более мощное управляющее воздействие, чтобы вернуть объект к исходному режиму; но объекту необходимо время и для реакции на управляющее воздействие. По этим причинам управляющее воздействие, соответствующее в некоторой мере вызвавшему его возмущающему воздействию, в программно-адаптивной схеме управления неизбежно запаздывает. Даже если мощность средств управления достаточна, чтобы полностью компенсировать возмущающее воздействие, она не может быть полностью использована вследствие того, что всегда имеет место фазовый сдвиг между возмущающим воздействием и компенсирующим его управляющим. По этой причине объект всегда находится под возмущающим воздействием факторов, реально учитываемых системой управления, не говоря уж о воздействии не учитываемых факторов: неопознанных, признанных мало влияющими, оказавшихся ниже порогов чувствительности средств измерения и т.п. Соответственно, замкнутая система — колебательная система, преобразующая возмущающее воздействие и управляющее воздействие в вектор ошибки управления, изменения которого в устойчивом процессе управления носят колебательный характер.
Потребность уменьшить вектор ошибки управления приводит к схеме «предиктор-корректор» — предуказатель-поправщик, предсказатель-поправщик. Смысл слова «предуказатель» объемлет смысл слова «предсказатель», но на Западе и в отечественной научной традиции уже принят термин «предиктор-корректор», однако не в общем управленческом смысле, а в ограниченном: в технике и вычислительной математике*. Поэтому мы, оговорив по-русски особенности нашего понимания — «предуказатель-поправщик», а не «предсказатель-поправщик» — сохраняем уже прижившийся на Западе термин «предиктор-корректор», однако расширив область его применения введением в контекст достаточно общей теории управления.
* Термин «предиктор-корректор» — название одного из методов вычислительной математики. В нём последовательными приближениями находится решение задачи. При этом алгоритм метода представляет собой цикл, в котором в последовательности друг за другом выполняются две операции: первая — прогноз решения и вторая — проверка прогноза на удовлетворение требованиям к точности решения задачи. Алгоритм завершается в случае, когда прогноз удовлетворяет требованиям к точности решения задачи.
Управление по схеме «предиктор-корректор»
Оно строится на основе прогнозирования в самом процессе управления поведения замкнутой системы, исходя из информации о текущем и прошлых состояниях замкнутой системы и воздействии на неё окружающей среды.
В этом принципиальное отличие схемы управления «предиктор-корректор» от программной и программно-адаптивной схем управления, в которых решение задачи прогностики полностью вынесено за пределы функционирования схемы в процессе управления.
Структурно-алгоритмически система управления, реализующая схему «предиктор-корректор», может быть условно представлена как сочетание:
- предиктора, выполняющего функцию прогноза и выработки закона управления (программы управления) — этому соответствуют 1–4-й этапы полной функции управления,
- и программно-адаптивного модуля, который управляет объектом на основе закона управления, выработанного предиктором, адаптируя его к конкретике обстоятельств, в которых протекает процесс управления, — этому соответствуют 5–7-й этапы полной функции управления.
При этом прогнозная информация в форме закона управления подаётся на вход программно-адаптивного модуля системы управления.
Вследствие этого система управления реагирует не только на уже свершившиеся отклонения замкнутой системы от идеального режима, но и на те, которые только имеют тенденцию к осуществлению (в случае, если прогнозирование достаточно точное). Если программно-адаптивное управление замыкает прямые и обратные связи через уже свершившееся прошлое, то в схеме «предиктор-корректор» некоторая часть прямых и обратных связей замыкается через прогнозируемое будущее. Информация о свершившемся прошлом и о настоящем в схеме предиктор-корректор, кроме прогнозирования и выработки управляющего сигнала, также используется как основа для минимизации (периодического обнуления) в процессе управления составляющей вектора ошибки, обусловленной накоплением с течением времени ошибок прогнозирования.
При сопоставлении программно-адаптивной схемы и «предиктора-корректора» на основе вектора состояния, используемого программно-адаптивной схемой, одному и тому же вектору состояния в схеме «предиктор-корректор» будут соответствовать разные управляющие сигналы, поскольку в основе прогноза «предиктора-корректора» лежит вектор состояния большей размерности, чем в программно-адаптивной схеме. На основе информации, выходящей за пределы тождественной части векторов состояния, используемых в обеих схемах, «предиктор-корректор» будет получать разные прогнозы, что и выразится в несовпадении управляющих сигналов, вырабатываемых в программно-адаптивных модулях обеих схем управления. То есть «предиктор-корректор» «умнее» и обеспечивает более гибкое, нешаблонное управление по сравнению с предъидущими схемами.
При условии достаточно высокой точности прогноза схема «предиктор-корректор» обеспечивает наиболее высокое качество управления за счёт того, что в ряде случаев сводит до нуля (при необходимости — до отрицательных величин: это — упреждающее управление) фазовый сдвиг между возмущающим воздействием и управляющим воздействием, обеспечивающим компенсацию возмущения. Это позволяет употребить ресурсы замкнутой системы на повышение запаса устойчивости управления и производительности замкнутой системы в отношении вектора целей управления. При других схемах управления эти резервы не могут быть использованы или расходуются на компенсацию той составляющей отклонений от идеального режима, которая обусловлена фазовым сдвигом управляющего воздействия относительно возмущающего по сравнению с теоретическим случаем отсутствия фазового сдвига между возмущением и управляющим воздействием.
Введение
Многие встраиваемые системы реального времени применяются для управления объектами. Такие системы обычно используют обратную связь для получения информации о состоянии объекта.
Обратная связь может быть реализована в виде аналогового датчика, предоставляющего системе данные о положении, напряжении, температуре, или любом другом подходящем параметре управляемого объекта.
Показания датчика считывается с помощью аналого-цифрового преобразователя, и каждый замер обеспечивает систему дополнительной информацией, на основе которой она принимает управляющие решения.
Замкнутая система управления
Системы управления, использующие обратную связь, называются замкнутыми. В таких системах обратная связь используется для изменения управляющего сигнала с целью достижения управляемым объектом требуемого состояния.
Для сравнения, разомкнутая система управления (open-loop control) не имеет обратной связи или не использует ее.
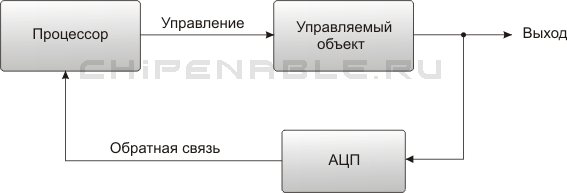
Рисунок 1. Система управления по замкнутому циклу
Простейшая замкнутая система управления показана на рис. 1. Этот рисунок характеризует множество существующих систем управления, включая, например, систему управления лифтом, термостат и круиз-контроль.
Замкнутая система управления обычно работает с фиксированной частотой. Частота изменений управляющего сигнала обычно меньше или равна частоте выборки состояния управляющего объекта. Во всяком случае, никак не больше.
После получения от датчика каждого нового значения данных, программное обеспечение управляющей системы реагирует на изменившееся состояние объекта, выполняя перерасчет и задавая требуемое значение управляющего сигнала. Объект откликается на эти изменения, производится следующая выборка и цикл повторяется. В конечном счете, управляемый объект должен достигнуть требуемого состояния и тогда программное обеспечение перестанет изменять управляющий сигнал.
Релейное управление
Зададимся вопросом, а как программное обеспечение должно менять управляющий сигнал? Один из вариантов состоит в установке управляющего сигнала на минимальное значение, когда мы хотим уменьшить интенсивность работы объекта и на максимальное значение, когда хотим увеличить. Такое управление называется релейным (on-off control) или двухпозиционным (bang-bang control). На таком принципе, например, построены многие термостаты.
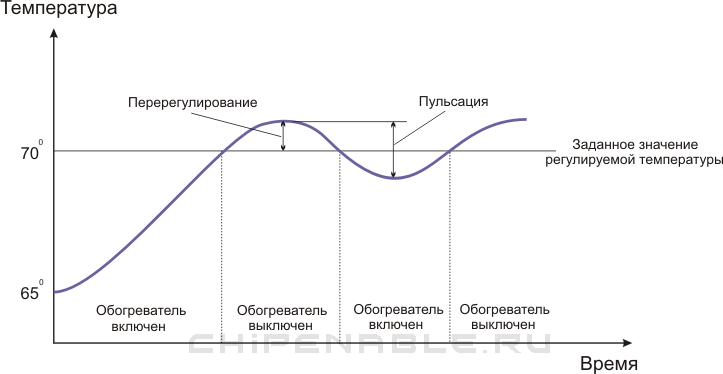
Рисунок 2. Пример релейного управления.
Релейное управление легко реализовать, но оно подходит не для всех систем. При использовании релейного управления могут возникать такие явления как перерегулирование и пульсации.
Перерегулирование представляет собой отклонение параметра управляемого объекта от заданного значения в ту или иную сторону. А пульсации – это явление многократного перерегулирования.
Это может быть не страшно для термостата, но, например, в системах управления лифтами совершенно не допустимо.
Пропорциональное управление
В качестве альтернативы релейному управлению существует пропорциональное управление. Системы пропорционального управления вычисляют разницу между текущим параметром объекта и заданным и пропорционально этой величине (текущей погрешности) изменяют управляющий сигнал.

где Р – постоянный коэффициента передачи пропорционального регулятора
Например, в качестве управляющего сигнала использует ШИМ сигнал. Он может принять любое значение от 0% до 100% рабочего цикла. Если управляющий сигнал равен 20% рабочего цикла и текущая погрешность мала, нам может потребоваться изменить его лишь на 1% или 2% для достижения требуемого результата.
Если коэффициент передачи пропорционального регулятора подобран верно, то время, за которое параметр управляемого объекта достигнет нового заданного значения, окажется минимально возможным, с минимальным перерегулированием (или недорегулированием) и пульсацией.
К сожалению, не во всех системах можно обойтись пропорциональным управлением. Одно, или несколько требований к скорости реагирования, перерегулированию и пульсации, может быть невыполнимым при любом коэффициенте передачи пропорционального регулятора.
Дифференциальное управление
У вас могут возникнуть проблемы с пропорциональным управлением, если вы хотите достичь нового значения параметра управляемого объекта быстро, избежать перерегулирование и минимизировать пульсацию. Быстрая реакция предполагает большой коэффициент передачи, а минимизация перерегулирования и пульсации предполагает маленький. Достижение обоих требований в одно и то же время может быть возможным не во всех системах.
К счастью, мы обычно можем получить информацию о скорости изменения какого-либо параметра объекта. Если он изменяется быстро, мы можем столкнуться с перерегулированием или недорегулированием. В этом случае мы можем уменьшить величину изменения, предложенного пропорциональным регулятором.
Скорость изменения сигнала представляет собой производную. Производная в текущий момент времени — это просто разность текущего и предыдущего значения сигнала. Помножив производную на коэффициент передачи, получим дифференциальную составляющую.

где D — коэффициент передачи дифференциального регулятора.
Естественно, в этом случае нам нужно сохранять предыдущую выборку сигнала в памяти системы.
На практике пропорционально-дифференциальные (ПД) контроллеры работают превосходно. У них более медленное время реагирования, но перерегулирование и пульсации меньше, чем в случае с одним пропорциональным регулятором.
Интегральная составляющая
ПД-регулятор не всегда будет устанавливать требуемое значение параметра объекта. На самом деле, в зависимости от коэффициента передачи, такой регулятор будет устанавливать значение параметра, отличающееся от необходимого.
Проблема возникает в том случае, когда каждая элементарная погрешность остается ниже пороговой величины и пропорциональная составляющая перестает влиять на управляемый объект. Например, погрешность равна 3, коэффициент передачи P = 1/8 и используется математика целых чисел. В этом случае от пропорциональной составляющей не будет толку, пока состояние объекта не изменится.
Для подведения объекта к заданному состоянию нужно кое-что еще. Этим кое-чем является интегральная составляющая.
Интеграл – это сумма выборок сигнала за отрезок времени. Применительно к нашему случаю – это сумма всех прошлых ошибок в выходных данных объекта:

Несмотря на то, что коэффициент передачи интегрального регулятора, I, как правило, мал, непрерывно появляющаяся ошибка, в результате суммирования накопится и интегральная составляющая повлияет на изменение в управляющем сигнале. На практике накопленная ошибка обычно ограничена максимальными и минимальными значениями.
Заключение
Итак, релейное и пропорциональное управление – это два основных метода управления с обратной связью. Однако производные и/или интегральные составляющие иногда добавляются к пропорциональным регуляторам для улучшения их характеристик. Объединив все три составляющие вместе, мы получим пропорционально-интегрально-дифференциальный регулятор. Или просто ПИД-регулятор.
Замкнутые системы автоматического управления

Замкнутые системы автоматического управления (САУ) отличаются от разомкнутых применяемой аппаратурой и полнотой автоматизации. В разомкнутой САУ задающее устройство (включающая, регулирующая аппаратура) не получает информацию о фактическом режиме работы электроустановки (приводного электродвигателя, рабочей машины).
В замкнутой САУ информация передается на элементы управления, что сопровождается подачей соответствующих командных сигналов. Цепочка, передающая такую информацию, замыкает контур управления, образуя замкнутую САУ, или САУ с обратными связями.
Различие между замкнутой и разомкнутой САУ можно пояснить па примере регулирования скорости электродвигателя в системе генератор — двигатель (Г—Д). В разомкнутой САУ (рис. 1,а) заданная скорость электродвигателя устанавливается вручную потенциометром П. Контроль скорости осуществляется визуально по тахометру, получающему питание от тахогенератора ТГ. Всякое отклонение скорости от заданной оператор устраняет воздействием на движок потенциометра.
В замкнутой САУ (рис. 1,б) якорь тахогенератора ТГ включен в цепь обмотки возбуждения генератора ОВГ, создавая замкнутую систему, или систему с обратной связью (в данном случае с обратной связью по скорости).
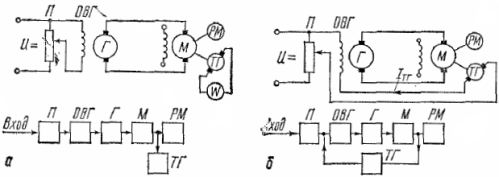
Рис. 1. Схема регулирования электродвигателя в системе Г- М: а — разомкнутая САУ, б — замкнутая САУ
Ток, создаваемый тахогенератором ( I тг) в замкнутой цепи, направлен навстречу току потенциометра ( I п), и в цепи действует результирующий ток, равный геометрической разности этих токов. Движком потенциометра оператор устанавливает такое значение результирующего тока в обмотке возбуждения ОВГ, при котором обеспечивается соответствующая скорость электродвигателя. На этом роль оператора заканчивается. В дальнейшем система автоматически с определенной точностью поддерживает заданный режим работы электропривода.
Допустим, что в результате наброса нагрузки скорость электродвигателя уменьшилась по сравнению с заданной. Уменьшение скорости сопровождается соответствующим уменьшением скорости тахогенератора и напряжения на его зажимах. Это в свою очередь вызовет уменьшение тока I тг в цепи обратной связи и в определенном положении движка потенциометра — увеличение результирующего тока в обмотке возбуждения генератора. Соответственно возрастут напряжение на генераторе и скорость электродвигателя.
Процесс увеличения скорости и напряжения будет продолжаться до тех пор, пока ток в цепи обратной связи не достигнет установленного значения, а скорость электродвигателя — заданной величины.
При анализе систем автоматического управления широко используют функциональные схемы. На рис. 2 показана функциональная схема САУ , которая включает следующие элементы:
1 — задающее устройство, которое задает режим работы, подает командный, начальный импульс или сигнал,
2 — элемент сравнения. В него входит сигнал Х1 от задающего устройства, сигнал Х0, определяющий норму или уровень контролируемой величины. С учетом сигнала от элемента 9-й главной обратной связи элемент 2 сравнивает поступившие сигналы и посылает дальше скорректированный сигнал Х2,
3 — преобразующий элемент, поступающий в него сигнал оп преобразует в другую форму, более удобную для дальнейшей передачи. Например, сигнал Х2 был дан в форме гидравлического (пневматического, механического) давления. Элемент 3 преобразовал его в электрический ток. Так как подобного рода преобразование может требовать дополнительной энергии, то элемент 3 связан с источником энергии ПЭ,
4 — суммирующий элемент, в него поступают два сигнала: Х3 и Х8 от корректирующего элемента (элемента памяти) 8. Эти сигналы суммируются элементом 4 в направляются в следующий элемент,
5 — элемент усиления, входящий сигнал Х1 может быть слабым и для последующей передачи должен быть усилен. Это делается элементом 5, который связан с источником энергии ПЭ,
6 — исполнительный элемент, выполняет полученный сигнал (электродвигатель, электромагнитное реле, серводвигатель),
7 — регулируемый объект, или рабочая машина.
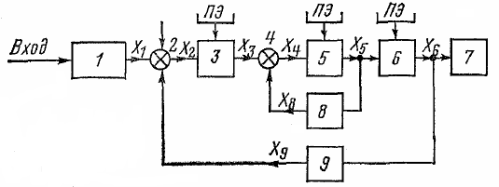
Рис. 2. Функциональная схема САУ
Каждый элемент автоматики — это преобразователь энергии, на вход которого подается величина X’, а с выхода снимается величина X». Для каждого элемента в установившемся режиме существует определенная зависимость X» (X’) называемая статической характеристикой .
Замкнутая система автоматического управления характеризуется наличием обратных связей, она имеет по крайней мере одну обратную связь, соединяющую выход системы с ее входом. Кроме того, могут быть так называемые внутренние обратные связи , соединяющие выход и вход отдельных элементов САУ.
Обратные связи делятся на жесткие и гибкие. Жесткие связи действуют как в переходном, так и в установившемся режимах работы системы, гибкие— только в переходном. Различают положительные обратные связи и отрицательные. При увеличении регулируемой величины положительная связь еще больше ее увеличивает, а отрицательная, наоборот, уменьшает. Обратные связи могут передавать сигналы, пропорциональные углу поворота, скорости, напряжению, току и т. п. и соответственно называются обратными связями по углу, скорости, напряжению, току.Подробнее смотрите здесь: Элементы систем автоматики
По принципу действия САУ можно разделить на три группы:
- непрерывного действия, в которых не нарушается связь между контролируемой и заданной величинами,
- импульсного действия, в которых связь между контролируемой и заданной величинами осуществляется через определенные промежутки времени,
- релейного действия, в которых связь осуществляется только тогда, когда заданная величина достигает определенного значения.
В зависимости от закона, по которому изменяется заданная величина во времени, САУ можно разделить также на три группы:
- системы с постоянным или малоизменяющимся значением заданной величины, в которых автоматически регулируемая величина поддерживается постоянной. Это системы стабилизации, которые по существу являются системами автоматического регулирования (САР),
- системы, в которых заданная величина изменяется по определенной, заранее установленной программе. Это система программного управления,
- системы, в которых заданная величина может изменяться в широких пределах и по произвольному закону, т. е. следящие системы.
Присоединяйтесь к нашему каналу в Telegram «Автоматика и робототехника»! Узнавайте первыми о захватывающих новостях и увлекательных фактах из мира автоматизации: Автоматика и робототехника в Telegram
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети: