Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f — частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
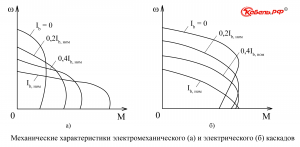
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
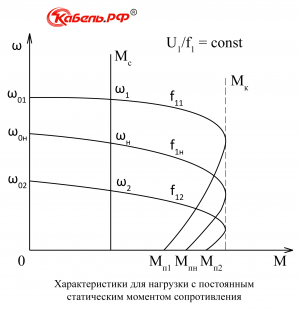
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
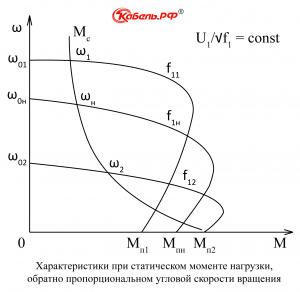
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
Частотное регулирование синхронного двигателя с двойной якорной обмоткой Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
Аннотация научной статьи по электротехнике, электронной технике, информационным технологиям, автор научной работы — Стрижков Игорь Григорьевич, Чеснюк Евгений Николаевич, Чеснюк Нина Евгеньевна, Тимохин Вячеслав Валерьевич
В статье приведены результаты экспериментального исследования частотного регулирования синхронного двигателя с двойной якорной обмоткой. Определены рациональный закон регулирования преобразователя частоты и возможные диапазоны регулирования частоты и нагрузки двигателя
i Надоели баннеры? Вы всегда можете отключить рекламу.
Похожие темы научных работ по электротехнике, электронной технике, информационным технологиям , автор научной работы — Стрижков Игорь Григорьевич, Чеснюк Евгений Николаевич, Чеснюк Нина Евгеньевна, Тимохин Вячеслав Валерьевич
Двухскоростной синхронноасинхронный двигатель
Моделирование электрооборудования стенда испытания роликовых цепей
Системы относительных единиц в теории синхронных машин с несколькими обмотками на статоре
Безитерационный метод расчета скольжения асинхронного двигателя в задачах сельскохозяйственного электропривода
Безитерационный метод расчета скольжения асинхронного двигателя в задачах сельскохозяйственного электропривода
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
i Надоели баннеры? Вы всегда можете отключить рекламу.
FREQUENCY REGULATION OF THE SYNCHRONOUS MOTOR WITH A DOUBLE ANCHOR WINDING
In this article we show the results of a pilot study of frequency regulation of the synchronous motor with a double anchor winding. The rational law regulating the frequency converter and the possible ranges of the frequency regulation and the engine load are defined
Текст научной работы на тему «Частотное регулирование синхронного двигателя с двойной якорной обмоткой»
Научный журнал КубГАУ, №92(08), 2013 года
ЧАСТОТНОЕ РЕГУЛИРОВАНИЕ СИНХРОННОГО ДВИГАТЕЛЯ С ДВОЙНОЙ ЯКОРНОЙ ОБМОТКОЙ
Стрижков Игорь Г ригорьевич д.т.н., профессор
Чеснюк Евгений Николаевич к. т. н., доцент
Чеснюк Нина Евгеньевна магистрант
Тимохин Вячеслав Валерьевич студент
Кубанский государственный аграрный университет, Краснодар, Россия
В статье приведены результаты экспериментального исследования частотного регулирования синхронного двигателя с двойной якорной обмоткой. Определены рациональный закон регулирования преобразователя частоты и возможные диапазоны регулирования частоты и нагрузки двигателя
Ключевые слова: СИНХРОННЫЙ ДВИГАТЕЛЬ, ЧАСТОТНОЕ РЕГУЛИРОВАНИЕ
FREQUENCY REGULATION OF THE SYNCHRONOUS MOTOR WITH A DOUBLE ANCHOR WINDING
Strizhkov Igor Grigorievich Dr.Sci.Tech., professor
Chesnyuk Evgeniy Nikolaevich Cand.Tech.Sci., associate professor
Chesnyuk Nina Evgenievna undergraduate student
Timokhin Viacheslav Valerievich student
Kuban State Agrarian University, Krasnodar, Russia
In this article we show the results of a pilot study of frequency regulation of the synchronous motor with a double anchor winding. The rational law regulating the frequency converter and the possible ranges of the frequency regulation and the engine load are defined
Keywords: SYNCHRONOUS MOTOR, FREQUENCY REGULATION
Синхронный двигатель с двойной якорной обмоткой (СДДЯ) [1] конструкции Кубанского госагроуниверситета и его модификации [2, 3] предназначены для привода турбомеханизмов, прежде всего центробежных мелиоративных насосов, а также для тягового привода сельхозназначения (электротракторов), и может найти применение в электроприводе других механизмов.
Двигатели этого семейства отличают такие качества, как низкая стоимость, отсутствие сложного устройства регулирования возбуждения, свойственного современным серийным двигателям, более высокий КПД, и высокая перегрузочная способность
Для тягового электропривода одним из важнейших качеств является возможность регулирования частоты вращения для регулирования скоро-
Научный журнал КубГАУ, №92(08), 2013 года
сти мобильного средства. Мелиоративным насосам часто необходимо ре-гулиро-
Рисунок 1 — Схема соединения обмоток СДДЯ: W1 — опорная якорная обмотка, W2 -проходная якорная обмотка, ОВ — обмотка возбуждения, Wyd, Wyq — составляющие демпферной обмотки по продольной (d) и поперечной (q) осям ортогональной системы координат математического описания машины, ВВ — выпрямитель.
Научный журнал КубГАУ, №92(08), 2013 года
вание частоты вращения для изменения производительности и напора насоса. В настоящее время все более широкое применение в указанных механизмах находит частотное регулирование электродвигателей переменного тока и потому актуальными являются исследования, направленные на определение целесообразности и эффективности этого способа регулирования скорости для СДДЯ. До настоящего времени отдельные результаты исследования частотного регулирования СДДЯ приводились только в региональной технической литературе [4].
Как и у других синхронных двигателей, частота вращения СДДЯ определяется частотой тока якорной обмотки
где w- синхронная частота вращения или частота вращения вала СДДЯ в установившемся синхронном режиме, рад/с; f — частота тока источника питания (якорной обмотки), Гц; p — число пар полюсов машины. Таким образом, изменение частоты тока вызывает пропорциональное изменение частоты вращения синхронного двигателя.
Предметом исследования являются закономерности изменения закона автоматического регулирования возбуждения (АРВ) двигателя при регулировании частоты источника питания.
Такие исследования могут быть выполнены методами математического моделирования СДДЯ или экспериментально. Математическая модель СДДЯ для анализа влияния частоты тока на режимные переменные в ортогональной системе d,q координат, жестко связанных с ротором, имеет вид:
Научный журнал КубГАУ, №92(08), 2013 года
Uqi = rO + P¥„1 +¥„iPg
Ud2 = (r2 + ГВ )’d2 + P¥d 2 +¥,lPY-+ (id2C0Sj — i,2sin% )P¥f l(bi ); U,2 = (r2 + rB )’,2 + P¥,2 +¥d2P7-Хв’в 2 + (id2 Sin j — ^,2 C0S j ) P¥f Kbjf X
¥J,1 -¥,1id1 + ¥d 2iq 2 -¥q2id2 = HPW + 4′;
¥d\ xd1 Xd 3 Xd1yd xf 1 id1
¥d 2 Xd 3 Xd 2 Xd 2 yd xf 2 X id2
¥yd Xd1yd Xd 2 yd x , yd xfyd iyd
yf Xd1 f Xd 2 f xydf xf if
¥q 1 x , q1 x 3 q3 x q1 yq i i q1
¥q 2 = x 3 q3 x 2 q2 x 2 q 2 yq X i 2 q2
¥yq x q1 yd x 2 q 2 yq x yd i yq
Условные обозначения параметров и переменных общепринятые в электромеханике: Uij — составляющие напряжения по i-ой оси j-ой обмотки; ij -то же для токов в обмотках; Y — потокосцепления обмоток; w — угловая частота вращения поля машины; g- угол между осью магнитного поля и осью фазной обмотки W1; b — угловое смещение магнитной оси обмотки W2 по отношению к обмотке W1; Д — коэффициент выпрямления по
Научный журнал КубГАУ, №92(08), 2013 года
напряжению мостового выпрямителя; Д — то же по току; Д — коэффициент, производный от предыдущих.
При использовании математической модели необходимо учитывать изменение реактивных сопротивлений машины при изменении частоты питания, что существенно усложняет использование матмодели при исследовании. Поэтому предпочтительными являются экспериментальные исследования с использованием лабораторной модели СДДЯ.
Экспериментальные исследования выполнены на кафедре электрических машин и электропривода КубГАУ на испытательной установке с СДДЯ 3,8 кВт, 220 В с параметрами обмоток, обеспечивающими закон АРВ на постоянство реактивной мощности при f1 = 50 Гц. В качестве регулятора частоты использовался электромашинный преобразователь частоты с синхронным генератором и двигателем постоянного тока. Опыт заключался в регулировании механической нагрузки двигателя при регулировании частоты питания. Фиксировалось изменение реактивной мощности машины при изменении нагрузки.
80 70 60 50 40 30
10 15 20 25 30 35 40 М, Нм
Рисунок 2 — Зависимость реактивной мощности СДДЯ от нагрузки и частоты тока
Зависимость указанных переменных представлена на рис. 2. Видно, что реактивная мощность СДДЯ имеет слабо выраженную зависимость от момента, но изменяется при изменении частоты тока. Причем, уменьшение
Научный журнал КубГАУ, №92(08), 2013 года
частоты сопровождается уменьшением реактивной мощности емкостного характера. В электроприводе насосов изменение частоты источника питания сопровождается пропорциональным изменением частоты вращения насоса и механической мощности, пропорционально частоте в третьей степени [5]. Таким образом, при увеличении или уменьшении частоты источника происходит увеличение или уменьшение активной и реактивной мощности СДДЯ.
Для электротракторов закономерность изменения механической нагрузки при изменении частоты источника и частоты вращения двигателя зависит от изменения тягового усилия, определяемого видом рабочей машины и сопротивлением движению рабочей среды (выполняемой технологической операции).
Установлено, что частотное регулирование СДДЯ эффективно при использовании в приводе вышеуказанных механизмов. Для повышения эффективности электродвигателя целесообразно применение частотного регулятора с законом регулирования на постоянство магнитного потока машины, предполагающий пропорциональное изменение амплитуды и частоты напряжения двигателя (U/f1=const). Для эффективного функционирования системы передачи электроэнергии (сети) целесообразно применять стандартный закон АРВ на постоянство реактивной мощности двигателя. Закон АРВ СДДЯ на постоянство реактивной мощности выполняется с погрешностью до 4 % от номинальной мощности двигателя. Такое изменение реактивной мощности приемлемо, поскольку не приводит к заметному снижению эффективности функционирования электрической сети сельскохозяйственного назначения.
При необходимости сохранения неизменной реактивной мощности двигателя необходима корректировка напряжения питания в сторону опережающего увеличения амплитуды напряжения по отношению к увеличению частоты. Для указанной модели СДДЯ стабилизация реактивной
Научный журнал КубГАУ, №92(08), 2013 года
мощности при частотном управлении достигается при законе управления, подчиняющемся уравнению
U = U + (1 — Ц°) U f . (1)
Формула (1) получена эмпирически по результатам обработки экспериментальных данных. Экспериментально установлено, что для исследуемой модели напряжение U0 принимает значение, равное 0,09ин. Для других моделей СДДЯ (других мощностей) значение U0 будет не сложно установить экспериментально. Конструктивное исполнение статорной обмотки и обмотки возбуждения СДДЯ для частотнорегулируемого привода может быть аналогичным нерегулируемому двигателю стандартной частоты 50 Гц.
Установлено также, что при частотном регулировании исследуемый СДДЯ сохраняет статическую устойчивость при изменении момента сопротивления холостого хода до 1,5Мн в диапазоне изменения частоты тока 10-70 Гц.
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
1. Стрижков И.Г. Математическая модель синхронного привода передвижных оросительных насосных установок/ И.Г.Стрижков, А.Н.Трубин, Р.Р. Бегляров/ Труды Кубанского гос. агр. ун-та. Научный журнал. Выпуск 1(22), 2010, с. 161-164.
2. Патент РФ 2141714, МКИ Н 02 К 17/26, 17/14. Двухскоростной синхронноасинхронный двигатель/Стрижков И.Г. и др. Опубл. 20.11.99 Б.И. № 32.
3. Патент РФ 2141715, МКИ Н 02 К 19/12, 47/20. Бесконтактный синхронный двигатель/Стрижков И.Г. и др. Опубл. 20.11.99 Б.И. № 32.
4. Стрижков И.Г. Частотное регулирование скорости синхронного двигателя с двойной якорной обмоткой / И.Г.Стрижков, А.Н.Трубин, Е.Н.Чеснюк /В кн.: Энергосберегающие технологии и процессы в АПК (Матер. научн. конф. КГАУ), Краснодар, 2002, с. 83-86.
5. Онищенко Г.Б. Электропривод турбомеханизмов / Г.Б.Онищенко, М.Г. Юньков /М., «Энергия», 1972, 240 с.
Научный журнал КубГАУ, №92(08), 2013 года
1. Strizhkov I.G. Matematicheskaja model’ sinhronnogo privoda peredvizhnyh orositel’nyh nasosnyh ustanovok/ I.G.Strizhkov, A.N.Trubin, R.R. Begljarov/ Trudy Kubanskogo gos. agr. un-ta. Nauchnyj zhurnal. Vypusk 1(22), 2010, s. 161-164.
2. Patent RF 2141714, MKI N 02 K 17/26, 17/14. Dvuhskorostnoj sinhronno-asinhronnyj dvigatel’/Strizhkov I.G. i dr. Opubl. 20.11.99 B.I. № 32.
3. Patent RF 2141715, MKI N 02 K 19/12, 47/20. Beskontaktnyj sinhronnyj dvigatel’/Strizhkov I.G. i dr. Opubl. 20.11.99 B.I. № 32.
4. Strizhkov I.G. Chastotnoe regulirovanie skorosti sinhronnogo dvigatelja s dvojnoj jakornoj obmotkoj / I.G.Strizhkov, A.N.Trubin, E.N.Chesnjuk /V kn.: Jenergosberegajushhie tehnologii i processy v APK (Mater. nauchn. konf. KGAU), Krasnodar, 2002, s. 83-86.
5. Onishhenko G.B. Jelektroprivod turbomehanizmov / G.B.Onishhenko, M.G. Jun’kov /M., «Jenergija», 1972, 240 s.
Регулирование частоты вращения электродвигателей
Порядка 70% потребляемой промышленностью мощности, приходится на электропривод. Огромное разнообразие технологических процессов диктует свои правила, вследствие чего, появилась необходимость в изменении скорости вращения электродвигателя непосредственно во время технологического процесса. В данной статье мы раскроем различные способы регулирования скорости вращения электродвигателей.
Параметры, изменив которые, мы изменим скорость двигателя переменного тока (ДПТ):
- частота напряжения;
- число пар полюсов;
- величина напряжения;
- добавочное сопротивление в цепи ротора;
- вентильный каскад.
Изменяемые параметры для ДПТ:
- напряжение питания;
- сопротивление цепи обмотки якоря;
- магнитный поток.
Методы регулирования частоты вращения электродвигателя
Далее мы подробно рассмотрим эти способы и их применимость к различным типам электродвигателей.
Частотное регулирование
Наиболее эффективный, постоянно совершенствующийся способ.
Применение: двигатели переменного тока (синхронные и асинхронные с кз ротором).
Корректируя частоту питающего напряжения, мы изменим угловую скорость магнитного поля статора, следовательно, скорость двигателя в значительном диапазоне, имея достаточно жесткие механические характеристики. Для сохранения в норме коэффициента мощности и допустимости кратковременных перегрузок, меняя частоту, следует изменять и саму величину питающего напряжения.
Преимущества способа:
- обширный диапазон регулировки;
- «жесткость» механических характеристик;
- минимум потерь «скольжения», мощности.
Недостаток — высокая стоимость (в последние годы становится менее актуально).
Регулирование изменением числа пар полюсов
Применение: т.к. промышленность не выпускает серийно синхронные двигатели с изменяемым количеством пар полюсов, будем считать, что способ актуален только для асинхронных двигателей (далее АД) с кз ротором.
Способ реализуется изменением числа пар полюсов у обмоток. Этого можно добиться, изготовив двигатель с двумя независимыми обмотками. Но этот метод приводит к удорожанию конструкции и увеличению размеров машины. Поэтому наиболее выгодным является увеличение числа пар полюсов без использования второй независимой обмотки.
Промышленностью выпускаются двухскоротсные, трёхскоростные и четырёхскоростные электродвигатели.
Достоинства:
- экономичность;
- «жёсткие» механические характеристики.
Недостатки:
- ограниченное количество возможных скоростей;
- ступенчатость переключения скоростей.
Изменение питающего напряжения
Применение: асинхронные двигатели.
Изменять напряжение на статоре можно, включая в его цепь резисторы (старый и неэкономичный способ), автотрансформаторы или тиристорные регуляторы.
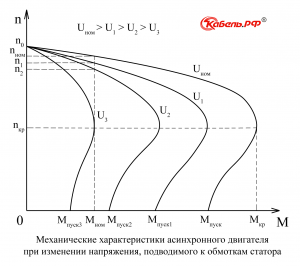
При регулировании скорости изменением напряжения, критический момент пропорционален квадрату подводимого напряжения. Снижается устойчивость к кратковременным перегрузкам и КПД, поэтому метод предпочтителен при «вентиляторной» нагрузке. Еще один недостаток — малый диапазон регулирования.
Добавочное сопротивление в цепи ротора
Применение: АД с фазным ротором.
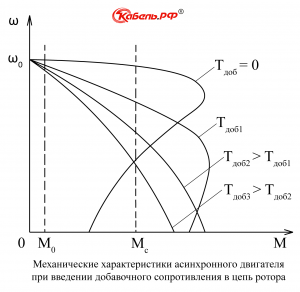
При изменении сопротивления ротора прямо пропорционально изменяется скольжение. Но величина критического момента остается постоянной. Это позволяет подобрать сопротивления так, чтобы уравнять критический момент с пусковым, что благоприятно сказывается на пуске двигателя под нагрузкой.
Достоинства способа:
- простота реализации;
- критический момент = const;
Недостатки:
- большие потери (при изменении скорости половина мощности тратится на выделение тепла);
- малый диапазон;
- «мягкие» механические характеристики.
Асинхронный вентильный каскад
Применение: АД с фазным ротором.
Смысл регулирования каскадными схемами заключается в подаче в цепь ротора добавочной ЭДС. Изменяя добавочную ЭДС ротора, мы изменяем ток ротора, а значит его момент и скорость. Создать добавочную ЭДС, помимо устройства вентильного каскада, может и ДПТ — машинно-вентильный каскад.
Достоинства:
- Минимум сопутствующей силовой и контактной аппаратуры;
- плавность регулировок;
- малая мощность управления.
Недостатки:
- стоимость;
- низкий коэффициент мощности;
- плохая устойчивость к перегрузкам.
Изменение напряжения питания якоря
Применение: любые ДПТ.
Способ можно использовать если источником электрической энергии является генератор. Реализовать от общей сети невозможно.
Достоинства:
- плавность регулировок;
- простота пусков и торможений;
- экономичность.
Недостатки:
- необходимость трехкратного преобразования энергии→низкий КПД;
- три электрические машины в системе;
- дорогая эксплуатация.
Применение: любые ДПТ.
Заключается в последовательном включении в цепь якоря регулировочного реостата. Но способ не получил распространения ввиду своей неэкономичности и плохого влияния на КПД двигателя, т.к. в цепи реостата теряется очень большое количество энергии.
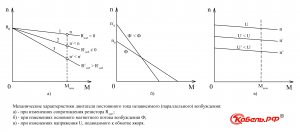
Регулирование изменением магнитного потока
В цепь возбуждения двигателей параллельного и смешанного возбуждения подключается реостат. В машинах последовательного возбуждения изменение магнитного потока в обмотке возбуждения производится шунтированием этой обмотки регулируемым сопротивлением. Максимальная скорость вращения двигателя ограничивается лишь механической прочностью якоря. Скорость двигателя регулируется в диапазонах 2:1-5:1, в частных случаях 8-10:1.
Преимущества:
- минимальные потери→экономичность;
- широкий диапазон регулирования
Недостатки:
- невозможно бесконечно уменьшать ток в обмотке возбуждения, двигатель уйдет «в разнос».
Для оформления заказа позвоните менеджерам компании Кабель.РФ ® по телефону +7 (495) 646-08-58 или пришлите заявку на электронную почту zakaz@cable.ru с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.
Регулирование скорости для приводов с синхронными двигателями
Очевидным преимуществом перед асинхронным двигателем, питаемым от частотного преобразователя, является то, что скорость синхронного двигателя точно определяется частотой, а асинхронный двигатель всегда должен работать со скольжением. Точного источника частоты достаточно для точного управления скоростью синхронного двигателя, в то время как обратная связь по скорости необходима для достижения точности асинхронным двигателем.

На практике работа синхронных двигателей с инверторным питанием без обратной связи не так широко распространена, как можно было бы ожидать, хотя она обычно используется в многодвигательных приводах. Тем не менее, замкнутый контур или самосинхронная работа быстро набирают обороты и уже хорошо зарекомендовали себя.
С одной стороны, вместо приводов постоянного тока используются большие синхронные двигатели с возбужденным ротором, особенно там, где требуются высокие скорости или когда двигатель должен работать в опасной среде (например, в большом газовом компрессоре).
На другом конце шкалы находятся небольшие синхронные двигатели с постоянными магнитами, используемые в бесщеточных приводах постоянного тока.
Приводы синхронных двигателей с преобразователем, питаемым в разомкнутом контуре
Этот простой метод подходит для установок с несколькими двигателями, где все двигатели должны работать с одинаковой скоростью.
Отдельные двигатели дороже, чем эквивалентные асинхронные двигатели массового производства, но это компенсируется тем фактом, что не требуется обратная связь по скорости, и все двигатели могут питаться от одного инвертора (частотного преобразователя), как показано на рис. 1.
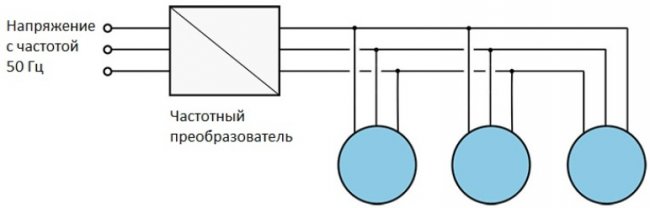
Рис. 1. Работа группы из нескольких синхронных двигателей с питанием от одного частотного преобразователя в разомкнутом контуре
Отношение напряжения к частоте инвертора обычно поддерживается постоянным, чтобы двигатели работали с полным потоком на всех скоростях и, следовательно, имели возможность «постоянного крутящего момента».
Если необходима длительная работа на малых скоростях, может потребоваться улучшение охлаждения двигателей.
Скорость точно определяется частотой привода, но изменения скорости (в том числе запуск из состояния покоя) должны выполняться медленно.
При работе группы из нескольких синхронных двигателей с питанием от одного частотного преобразователя в разомкнутом контуре иногда может возникать проблема, которая заключается в том, что скорость двигателя демонстрирует явные спонтанные колебания.
Частота питания может быть абсолютно постоянной, но частота вращения ротора колеблется вокруг ожидаемого (синхронного) значения, иногда с заметной амплитудой и обычно с низкой частотой, скажем, 1 Гц.
Причина такого нестабильного поведения заключается в том, что двигатель и нагрузка образуют систему как минимум четвертого порядка, и поэтому она может быть очень плохо демпфированной или даже нестабильной при определенных сочетаниях параметров системы.
Факторами, влияющими на стабильность, являются напряжение на клеммах, частота питания, постоянные времени двигателя, инерция и демпфирование нагрузки.
Неустойчивое поведение в собственном смысле слова (т. е. когда колебания неограниченно нарастают) встречается редко, но ограниченная неустойчивость не редкость, особенно на скоростях значительно ниже базовых 50 Гц и в условиях легкой нагрузки.
Очень сложно точно предсказать, когда может произойти нестабильное поведение, и необходимо принять меры против него. Поэтому некоторые преобразователи содержат схемы, которые обнаруживают любую тенденцию к колебаниям тока и модулируют напряжение и частоту для подавления нежелательных колебаний.

Рис. 2. Синхронный двигатель с постоянными магнитами Wolong Electric Group демонстрируется на выставке в городе Ханчжоу в Китае
Самосинхронная (замкнутая) работа
В разомкнутой схеме частота питания двигателя независимо регулируется частотным преобразователем, который не может точно определить, правильно ли ротор заблокирован вращающимся полем, создаваемым статором, и если тяговый момент превышен, двигатель просто останавливается.
Однако в самосинхронном режиме выходная частота инвертора определяется скоростью вращения ротора. В частности, моменты включения и выключения обмотки статора коммутационными устройствами определяются зависимыми от положения ротора сигналами, получаемыми от датчика положения ротора, установленного на валу ротора.
Таким образом, токи статора всегда включаются в нужное время для создания желаемого крутящего момента на роторе, потому что инвертор знает, где находится ротор в любой момент времени.
Использование сигналов обратной связи по положению ротора для управления инвертором объясняет приведенное выше описание «замкнутого контура».
Если ротор замедляется (например, из-за увеличения нагрузки), частота питания статора автоматически снижается, так что ротор остается синхронизированным с вращающимся полем, и поэтому двигатель не может «вырваться», как это происходит в режиме разомкнутого контура.
Различие между работой с обратной связью и без обратной связи может помочь прояснить аналогию с двигателем внутреннего сгорания.
Двигатель всегда работает как замкнутая система в том смысле, что открытие и закрытие впускных и выпускных клапанов автоматически синхронизируется с положением поршней с помощью распределительного вала и зубчатого ремня.
В самосинхронной машине это похоже на то, что переключающие устройства в инверторе включают и выключают ток в зависимости от положения ротора.
Напротив, работа двигателя в разомкнутом контуре означала бы, что мы сняли ремень ГРМ и решили управлять клапанами с отдельным приводом распределительного вала, и в этом случае должно быть ясно, что двигатель сможет производить мощность только на одной скорости при что движение поршней вверх и вниз в точности соответствует открытию и закрытию клапанов.
Оказывается, общие рабочие характеристики самосинхронного двигателя переменного тока очень похожи на характеристики обычного двигателя постоянного тока.
Это действительно неудивительно, если мы понимаем, что в двигателе постоянного тока механический коммутатор меняет направление тока в каждой (вращающейся) обмотке якоря в соответствующей точке, так что, независимо от скорости, ток под каждым (неподвижным) полюсом поля равен всегда в правильном направлении, чтобы создать требуемый крутящий момент.
В самосинхронном двигателе роли статора и ротора меняются местами по сравнению с двигателем постоянного тока.
Поле вращается, а «якорная» обмотка (состоящая из трех отдельных групп катушек или фаз) неподвижна.
Время и направление тока в каждой фазе контролируются переключением инвертора, которое, в свою очередь, определяется датчиком положения ротора. Поэтому, независимо от скорости, крутящий момент всегда в правильном направлении.
Комбинация датчика положения ротора и инвертора выполняет практически ту же функцию, что и коммутатор в обычном двигателе постоянного тока.
Конечно, обычно инвертор должен переключать только три обмотки по сравнению с гораздо большим количеством катушек и сегментов коммутатора, которые должны переключать щетки в двигателе постоянного тока, но в остальном сравнение применимо.
Неудивительно, что комбинацию датчика положения и инвертора иногда называют «электронным коммутатором», а общее сходство в поведении дает начало термину «двигатель с электронной коммутацией» (ECM) или «бесщеточный двигатель постоянного тока» (BLDC) для обозначения самосинхронных электрических машин.
Эксплуатационные характеристики и управление
Если входное напряжение постоянного тока инвертора постоянно и двигатель запускается из состояния покоя, ток через двигатель сначала будет большим, но будет уменьшаться со скоростью до тех пор, пока кинетическая электромагнитная сила, создаваемая внутри двигателя, почти не сравняется с приложенным напряжением.
По мере увеличения нагрузки на вал скорость начинает уменьшаться, электромагнитная движущая сила уменьшается, а ток увеличивается до тех пор, пока не будет достигнуто новое равновесие, при котором дополнительный крутящий момент двигателя равен крутящему моменту нагрузки.
Это поведение аналогично обычному двигателю постоянного тока, где скорость холостого хода зависит от приложенного напряжения якоря.
Таким образом, скоростью самосинхронного двигателя можно управлять, контролируя напряжение в звене постоянного тока до инвертора.
Общее сходство с приводом постоянного тока намеренно подчеркнуто на рис. 3.
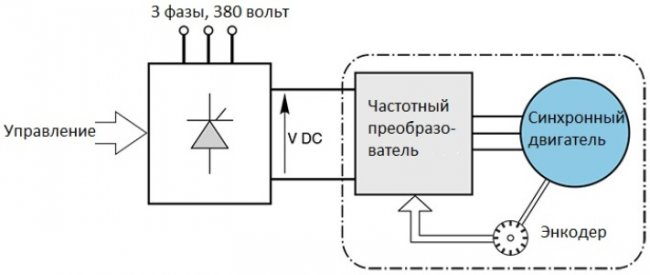
Рис. 3. Самодействующая система синхронного двигателя с инвертором. Для больших размеров такое устройство иногда называют синхронным приводом. Для меньших размеров, как бесщеточный привод с двигателем постоянного тока.
Штриховая линия, ограничивающая двигатель переменного тока вместе с датчиком положения ротора и инвертором, по существу заменяет обычный двигатель постоянного тока.
Однако отметим, что тахометр не является необходимым для регулирования скорости с обратной связью, поскольку сигнал обратной связи по скорости может быть получен из частоты сигнала положения ротора. И, как и в случае с приводом постоянного тока, можно использовать регулировку тока, а не регулировку напряжения, если необходимо контролировать выходной крутящий момент, а не число оборотов в минуту.
Если привод питается от полностью управляемого привода, возможна полноценная четырехквадрантная работа. С точки зрения затрат самосинхронная система кажется привлекательной, если совокупная стоимость частотного преобразователя и синхронного двигателя меньше стоимости эквивалентного двигателя постоянного тока.
Когда такие схемы были впервые представлены в 1970-х годах, они были рентабельны только при очень больших размерах (скажем, выше 1 МВт), но точка безубыточности для двигателей с возбуждением падает, и приводы с номинальной мощностью в сотни кВт теперь очень распространены.
Поскольку стоимость преобразователей упала, приводы меньшей мощности, использующие двигатели с постоянными магнитами, стали привлекательными, особенно там, где требуются очень высокие скорости и где обычный коллекторный двигатель постоянного тока не подходит из-за ограничений коммутатора.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Ранее на эту тему: Электропривод