Как это работает: синхронный электродвигатель
Синхронные электродвигатели впервые появились в середине XIX века и сегодня широко применяются в газо- и нефтедобывающей промышленности, станкостроении, автомобилестроении, ЖКХ и других отраслях. Они хорошо справляются с перегрузками и могут стабильно работать долгое время без остановки. Именно такие двигатели для самых разных задач выпускает Калужский электромеханический завод концерна «Автоматика».
О том, как устроен и как работает синхронный электродвигатель, читайте в нашем материале.
По законам магнетизма
Синхронные электродвигатели служат людям в самых разных отраслях промышленности. Благодаря своим характеристикам они могут приводить в движение мощные приводы, устойчивы к ударным нагрузкам, часто возникающим, например, в металлургии и машиностроении. Такие двигатели подходят для длительной постоянной работы в приводах насосов, вентиляторов, компрессоров, генераторов – устройств, которые используются практически на каждом промышленном производстве. Конструктивная сложность таких двигателей окупается их высоким КПД и экономичностью.
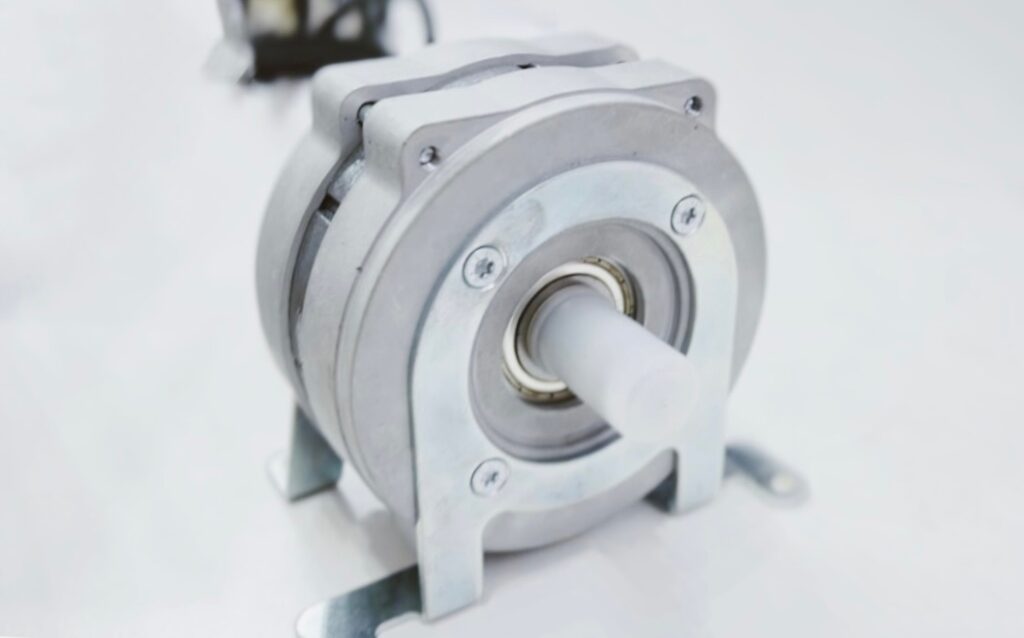
Фото: концерн «Автоматика»
В основе работы синхронного электродвигателя лежит знакомый всем по урокам физики эффект отталкивания одноименных магнитных полюсов. Не погружаясь в терминологию, эту работу можно описать так: стационарная и движущаяся части устройства отталкиваются друг от друга, в результате чего получается полезный крутящий момент, то есть электрическая энергия превращается в механическую.
Принципиальная конструкция любого электродвигателя такова: неподвижная часть (статор), подвижная часть (ротор), ось ротора с подшипниками, корпус и провода. Нужно упомянуть, что электродвигатели бывают постоянного и переменного тока, последние в свою очередь делятся на асинхронные и синхронные.
Как работает синхронный двигатель
Чтобы получить полезное действие, практически в любой электротехнике, где движение вызывается благодаря электромагнитному полю, применяется закон Ампера. Именно Мари Ампер в 1820 году установил, что между двумя параллельными проводниками, подключенными к постоянному току, действует притяжение, если токи однонаправленные, или отталкивание, если токи противоположные. Сила Ампера приводит в движение электропоезда и трамваи, двери лифтов и электрические ворота, а также заставляет звучать виброзвонок в вашем смартфоне.
Если в качестве проводника тока мы возьмем рамку и разместим ее в магнитное поле между двумя магнитами, на нее начнет действовать сила Ампера, то есть линии магнитной индукции начнут толкать проводник. Закрепив эту рамку посредством подшипников на оси, мы получим вращение.
Фото: концерн «Автоматика»
В синхронном двигателе статор создает вращающееся магнитное поле, а ротор − постоянное магнитное поле. На статоре присутствует электрическая цепь в виде обмотки, на которую подается трехфазное напряжение, создающее магнитное поле, которое вращается с синхронной скоростью. Обмотка ротора возбуждается источником питания постоянного тока, поэтому он действует как постоянный магнит. Разноименные полюса ротора будут притягиваться к соответствующим полюсам вращающегося поля статора. При таком взаимодействии возникает крутящий момент, вращающий вал. Скорость вращения будет равна частоте вращающегося магнитного поля неподвижного статора.
Если противополюсные магниты статора и ротора совпадают, они вращаются с синхронной скоростью. Если ротор не имеет первоначального вращения, то появится отталкивающая сила, и ротор не сможет начать вращение. Таким образом синхронные двигатели – это двигатели без самозапуска.
Для запуска ротора синхронного двигателя между краями полюсов устанавливается так называемое «беличье колесо». При запуске на катушки ротора не подается напряжение, при этом электрический ток индуцируется в прутьях «колеса», и ротор начинает вращаться как в асинхронном двигателе. Когда ротор достигает максимальной скорости, на катушки ротора подается напряжение. В результате полюс ротора и статора фиксируются, и начинается синхронное движение.
Электродвигатели широкого профиля
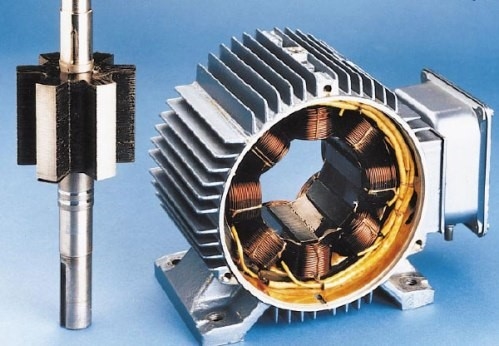
Разработка и выпуск синхронных двигателей – одно из направлений работы Калужского электромеханического завода (КЭМЗ) в составе концерна «Автоматика» Госкорпорации Ростех.
Двигатели из Калуги отличаются высокими коэффициентами мощности и полезного действия, повышенной надежностью и энергоэффективностью. Постоянная частота вращения в них поддерживается даже при большой механической нагрузке на вал. По сравнению с асинхронными двигателями устройства КЭМЗа имеют более широкий диапазон настроек частоты вращения, а также более выгодные массогабаритные характеристики.
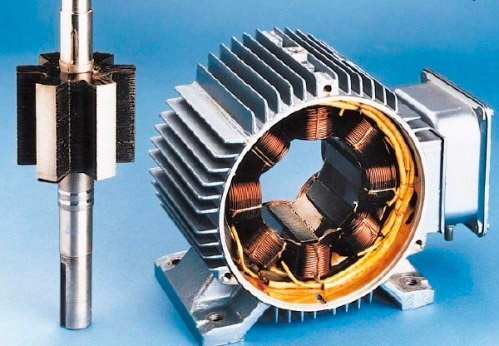
 Фото: Агентство регионального развития Калужской области
Фото: Агентство регионального развития Калужской области
Именно компактные размеры и небольшой вес – до 3 кг – делают возможным в перспективе применение одной из последних разработок калужан в качестве двигателя для беспилотников вертолетного типа. Такой электродвигатель был представлен заводом Ростеха на форуме «Армия-2022». Двигатели КЭМЗа собраны полностью из российских комплектующих, что отвечает задачам импортозамещения.
Среди других направлений, в которых калужские синхронные двигатели уже зарекомендовали себя, − нефтегазовый сектор, промышленные системы вентиляции и кондиционирования, автотранспорт, ЖКХ. Для коммунальщиков инженеры КЭМЗа недавно представили новый синхронный электродвигатель для лифтов, выпускаемых Щербинским лифтостроительным заводом. Двигатель отличается тихим ходом и экономичным потреблением энергии.
О том, что калужские синхронные двигатели востребованы промышленностью, можно понять по цифрам производства. Так, в 2022 году КЭМЗ выпустил более 11 тысяч штук, нарастив объем с 2020 года примерно в два раза. В планах на текущий год – увеличить выпуск по некоторым моделям еще на 100%.
События, связанные с этим
Аэропорт «под ключ»
Совершенно секретно: история шифровальных устройств
Эксплуатация электрических машин и аппаратуры — Синхронные двигатели
Конструкция синхронного двигателя аналогична конструкции синхронного генератора. Ротор обычно явнополюсной. На роторе, в его полюсных башмаках обязательно укрепляют пусковую обмотку, она подобна успокоительной обмотке генератора. Для улучшения пусковых характеристик воздушный зазор в двигателях делают несколько меньше зазора в генераторе.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного потока статора с магнитным потоком ротора (индуктора). При протекании трехфазного тока по трехфазной обмотке статора образуется вращающееся магнитное поле. Скорость вращения его при заданной частоте тока для данного двигателя величина постоянная. Магнитное поле статора жестко сцепляется с магнитным полем ротора; северный полюс статора будет против южного полюса ротора и увлечет в своем вращении ротор двигателя. Ротор двигателя вращается с постоянной скоростью независимо от величины нагрузки.
В синхронном генераторе магнитное поле статора следует за магнитным полем ротора, то есть в этом процессе ведущий — ротор. Поле статора — ведомое. Ось магнитного потока ротора в генераторе в пространстве опережает ось магнитного потока статора. Этот угол опережения увеличивается с ростом активной нагрузки генератора. В синхронном двигателе магнитное поле ротора следует за магнитным полем статора. Здесь поле статора ведущее, а ротор ведомый. В двигателе ось магнитного потока ротора в пространстве при своем вращении отстает от оси магнитного потока статора. Этот угол отставания возрастает с увеличением нагрузки двигателя (тормозного момента на валу).
В синхронных машинах угол раствора осей магнитного потока ротора и статора может увеличиться до 90°, при больших углах машина выпадает из синхронизма. В этом случае скорость ее уже не постоянная, она потребляет очень большой ток. защита должна быстро отключить двигатель от сети.
Синхронные двигатели характеризуются перегрузочной способностью, то есть отношением максимального момента к номинальному. Величина момента синхронных двигателей в отличие от асинхронных зависит от величины питающего напряжения в первой степени, то есть уменьшения напряжения, например вдвое, сопровождается уменьшением и максимального момента вдвое. Перегрузочная способность синхронного двигателя очень существенно зависит от тока возбуждения. С уменьшением тока возбуждения уменьшается максимальный момент двигателя, а угол раствора осей потоков увеличивается. При некотором, предельно наименьшем токе возбуждения максимальный момент двигателя будет равен тормозному моменту, а угол раствора — 90. Дальнейшее уменьшение тока возбуждения приведет к тому, что максимальный момент двигателя будет меньше тормозного, двигатель выпадет из синхронизма.
Коэффициент мощности синхронного двигателя может принимать разные значения в зависимости от тока возбуждения.
Коэффициент мощности и ток статора в синхронном двигателе регулируют изменением тока возбуждения. Если в асинхронных двигателях при постоянном напряжении, частоте и моменте сопротивления ток статора и коэффициент мощности вполне определенные величины, то в синхронных двигателях эти величины при тех же условиях можно изменить в широких пределах.
Можно ток возбуждения отрегулировать так, чтобы cos φ двигателя стал равным единице. Такой двигатель называют нормально возбужденным. При уменьшении тока возбуждения cos φ уменьшается, реактивную мощность двигатель потребляет из сети, которая и идет на покрытие недостатка собственного возбуждения.
Если ток возбуждения увеличивать ст значения, соответствующего нормальному возбуждению, cos φ уменьшается. В этом случае реактивная мощность отдается двигателем в сеть вследствие избытка возбуждения.
Возможность регулирования коэффициента мощности наряду с постоянством скорости вращения — важное качество синхронного двигателя в сравнении с асинхронным. При любой нагрузке синхронного двигателя сравнительно просто получить cos φ = 1, а при большем токе возбуждения он будет отдавать реактивную мощность в сеть, которую потребляют асинхронные двигатели и трансформаторы.
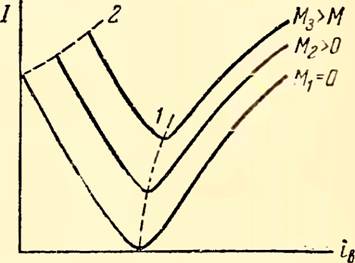
Ток статора синхронного двигателя в зависимости от тока возбуждения определяют (U-образной характеристикой.
U-образная характеристика представляет зависимость тока двигателя от тока возбуждения при постоянных величинах: напряжении, частоте и моменте нагрузки на валу.
Рис. 52/ U-образные характеристики синхронного двигателя:
1 — регулировочная характеристика при cos φ = L; 2 — линия статической устойчивости.
На рисунке 52 представлены (U-образные характеристики синхронного двигателя при трех значениях момента. Каждая U-образная характеристика имеет низшую точку, которая соответствует нормальному возбуждению двигателя, то есть здесь cos φ = 1. Ордината низшей точки U-образной характеристики представляет активную составляющую тока статора при данном моменте двигателя. Левая ветвь характеристики соответствует недовозбужденному режиму двигателя, когда он работает с отстающим током при потреблении реактивной мощности из сети. Правая ветвь характеристики соответствует режиму перевозбуждения двигателя, когда он работает с опережающим током при отдаче реактивной мощности в сеть.
Чем больше момент двигателя, тем выше U-образная характеристика и тем правее будет низшая ее точка. Кривая 1, соединяющая разгружена от реактивной мощности, cos φ станет близким к единице, пропускная способность линии увеличится.
С помощью компенсатора можно регулировать напряжение в конце линии передачи. Если напряжение в конце линии уменьшится, то перевозбуждением компенсатора можно напряжение довести до номинального. В случае повышения напряжения в конце линии свыше номинального, что может быть при малой нагрузке, недовозбуждением компенсатора можно снизить напряжение до требуемого уровня. Синхронный компенсатор даже при постоянном токе возбуждения способен в некоторой мере стабилизировать напряжение линии.
Синхронные компенсаторы — это крупные электрические машины мощностью в тысячи и десятки тысяч киловольт-ампер. Включают в сеть синхронные компенсаторы по методу асинхронного пуска синхронных двигателей. Очень крупные компенсаторы пускают разгонным двигателем.
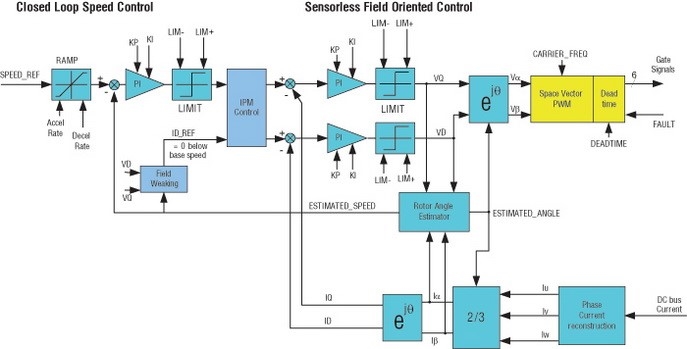
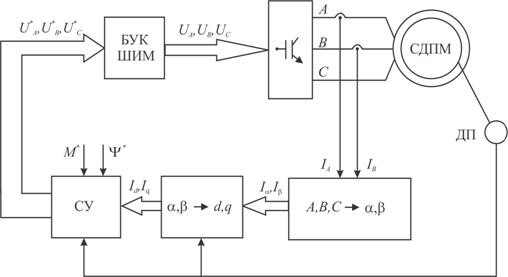
Управление синхронным двигателем с постоянными магнитами преобразователем частоты Danfoss
Синхронные двигатели с постоянными магнитами или магнитоэлектрические машины не имеют обмоток возбуждения на роторе. Вращение осуществляется за счет взаимодействия магнитных полей обмоток статора и постоянных магнитов, размещенных на роторе электрической машины. Синхронные машины с постоянными магнитами совмещают простоту конструкции двигателей переменного тока и возможности управления ДПТ. Они обладают следующими преимуществами:
- Высокий к.п.д. во всем диапазоне частот вращения ротора, в том числе, и на пониженных скоростях.
- Простота конструкции и отсутствие потерь на возбуждение.
- Невысокая инерция при значительном моменте.
- Небольшие габариты. Например, асинхронная машина аналогичной мощности и класса энергоэффективности в 2 раза больше синхронного двигателя.
- Поддержание момента на валу, независимо от скорости вращения ротора.
Синхронные двигатели с постоянными магнитами выпускают малой и средней мощности. Их широко применяют в системах автоматики, оборудовании с высокими требованиями к стабильности частоты вращения.
К недостаткам синхронных машин относятся необходимость применения дополнительного оборудования для пуска и входа в синхронный режим, возможность размагничивания ротора при высоких температурах, необходимость установки датчиков обратной связи. Появление частотных преобразователей и современных материалов для магнитов позволило решить эти проблемы.
Конструкция электрических машин синхронного типа с постоянными магнитами
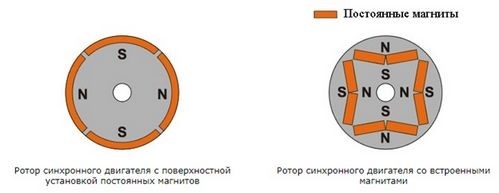
СДПМ состоит из подвижной (ротора) и неподвижной (статора) части. Исполнение ротора различается:
- По установке магнитов. Они могут размещаться на поверхности (SPMSM ) и внутри (IPMSM) вращающегося узла. Роторы со встроенными магнитами применяются в двигателях, работающих при значительной нагрузке на валу и высоких скоростях. Стоимость таких роторов существенно выше.
- По конструкции (явнополюсные и неявнополюсные роторы). Последние имеют равную индуктивность по осям горизонтальной плоскости. Роторы с явновыраженными полюсами имеют разное отношение индуктивности.
Постоянные магниты изготавливают из ферритов, сплавов редкоземельных металлов и других материалов с высокой коэрцитивной силой.
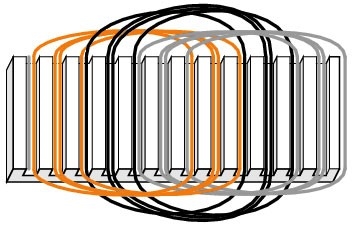
Статор синхронных электрических машин состоит из сердечника, набранного из листов электротехнической стали, и двух- или трехфазной обмотки. Различают статоры с распределенной и сосредоточенной обмоткой. Первая имеет различное положения витков в магнитном поле. Витки в сосредоточенных обмотках имеют одинаковое положение.
Сосредоточенная обмотка:
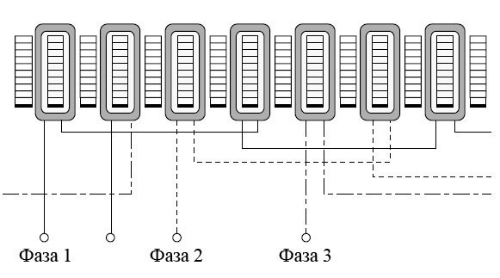
Распределенная обмотка:
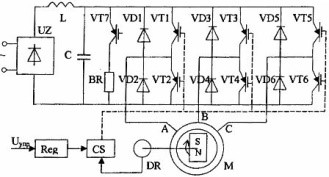
Принцип работы синхронного двигателя
Принцип работы синхронных машин основан на законе Ампера. Вращающий момент появляется при взаимодействии поля ротора, образуемого постоянными магнитами, и магнитного поля обмоток статора. Синхронный двигатель не может запуститься при прямом включении в сеть. Для этого применяют:
- Запуск при помощи дополнительного двигателя. Для этого вал СДПМ соединяют с валом другой электрической машины. Такой способ дорог и практически не применяется.
- Пуск в асинхронном режиме. Роторы таких электродвигателей имеют короткозамкнутую обмотку типа “ беличья клетка”. При этом пуск происходит в асинхронном режиме. После входа в синхронизм, стержневая обмотка ротора отключается.
- Запуск при помощи частотного преобразователя. При этом ПЧ включается в цепь обмотки статора и подает на них напряжение плавно увеличивающейся частоты.
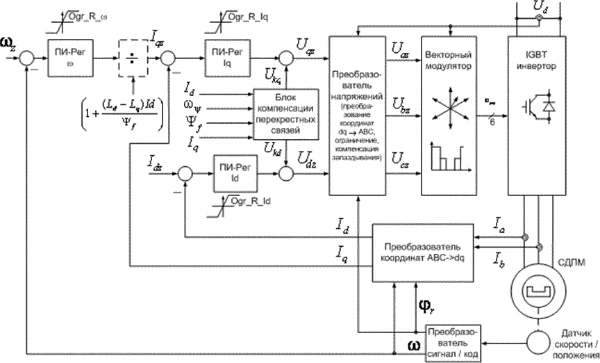
Управление синхронным двигателем с постоянными магнитами
Управление синхронными машинами осуществляется при помощи частотных преобразователей и сервоконтроллеров. Существует насколько принципов управления СДПМ. Выбор схемы осуществляется исходя из требований к электроприводу и экономической целесообразности. Наиболее распространенные схемы реализации управления синхронным электроприводом:
Скалярное
Такая схема отличатся простотой и дешевизной. При низких скоростях вращения и переменной нагрузке на валу, такой метод не подходит. При превышении нагрузки предельного момента силы на валу, электрическая машина выходит из синхронного режима и становится неуправляемой.
Векторное
Векторное управление синхронным двигателем с постоянными магнитами реализуется 3 способами:
- Полеориентированное управление с датчиком положения. Первая схема позволяет осуществлять плавное регулирование частоты вращения и момента на валу, а также задавать точное положение ротора. В качестве датчиков применяются оптические, магнитные и магниторезистивные устройства, синусно-косинусные вращающиеся трансформаторы, индуктивные энкодеры и другие устройства. Такие схемы требуют наличия контроллеров и точной настройки. Их стоимость достаточно высока. Применять схемы векторного управления имеет смысл только в претенциозных электроприводах высокоточных станков, дозаторов и т.д.
- Полеориентированное управление синхронными машинами без датчика обратной связи. Принцип определения угла поворота ротора при таком методе основан на генерации электродвигателем противо ЭДС при вращении. Вычисление ее величины позволяет определить положение ротора в стационарной системе координат. Управление без датчика не подходит при невысоких скоростях вращения, так как величина обратной ЭДС слишком мала и не превышает уровень обычных электромагнитных шумов. Кроме того, при неподвижном роторе противо ЭДС не генерируется вовсе. Схема без датчика позволяет изменять характеристики электропривода СДПМ с явнополюсным ротором. При использовании синхронных машин другого типа диапазон регулировки сильно снижается. Для этой схемы необходим процессорный управляющий блок.
- Прямое управление моментом. Такая схема обеспечивает хорошие динамические характеристики электропривода и широкий диапазон регулировки. Ограничивают ее применение значительная погрешность определения положения ротора и высокие пульсации тока статора и момента на валу. Кроме того, прямое управление создает высокую вычислительную нагрузку, для таких схем требуется мощное процессорное устройство.
Трапециидальное управление
Такая схема применяется для вентильных двигателей. Конструкция таких машин ничем не отличаются от СДПМ. Главная их особенность – принцип питания. На обмотки статора ВД подается трапециевидное напряжение. Переключение по фазам осуществляется в зависимости от угла поворота ротора.
Схемы управления ВД также бывают с датчиком и без них. В качестве устройства, обеспечивающего обратную связь, обычно используются датчики Холла. Чем больше их количество, тем точнее определяется угол поворота. Например, 3 датчика Холла позволяют определить положение ротора с точностью ±300. Бездатчиковые системы управления определяют положения по заранее известным функциям. Такие схемы применяются для решения несложных задач.
Основные направления развития контроллеров и преобразователей частоты Danfoss для СДПМ
Синхронные электродвигатели с постоянными магнитами превосходят машины постоянного тока по возможности и точности управления. Они позволяют реализовать множество схем и алгоритмов. Ведущие производители электротехники для приводов, в том числе, компания Danfoss разработали несколько линеек контроллеров и преобразователей частоты для электродвигателей такого типа. Ведутся дальнейшие разработки в следующих направлениях:
- Повышения точности отработки управляющего сигнала. Возможности изменять подсинхронные скорости вращения, определять границы динамических режимов, осуществлять регулирование во всем допустимом диапазоне.
- Снижения энергопотребления. Разрабатываются алгоритмы, оптимизирующие потребляемую СДПМ мощность путем подачи размагничивающих токов.
- Увеличения стабильности момента на малых оборотах путем устранения пульсаций.
- Упрощения алгоритмов управления, что позволит применять более дешевые контроллеры и ПЧ.
- Уменьшения количество датчиков. Безэнкодерный электропривод более надежен, однако, более чувствителен к разбросу характеристик.
- Уменьшения чувствительности привода к помехам. При усилении противо ЭДС на низких оборотах в полеориентированных схемах управления без датчика обратной связи, возрастает чувствительность к помехам.
- Создания контроллеров для использования СДПМ в качестве серводвигателей в сложных динамических системах с высокими требованиями к точности отработки команд.
Компания Danfoss может предложить технические решения управления синхронными двигателями с постоянными магнитами, отвечающими современным требованиям к электроприводу.
Режимы работы синхронных генераторов, рабочие характеристики генераторов

Основными величинами, характеризующими синхронный генератор, являются: напряжение на зажимах U , нагрузка I , полная мощность P (кВа), число оборотов ротора в минуту n , коэффициент мощности cos φ .
Важнейшие рабочие характеристики синхронного генератора следующие:
- характеристика холостого хода,
- внешняя характеристика,
- регулировочная характеристика.
Характеристика холостого хода синхронного генератора
Электродвижущая сила генератора пропорциональна величине магнитного потока Ф, создаваемого током возбуждения i в, и числу оборотов n ротора генератора в минуту:
где с — коэффициент пропорциональности.
Хотя величина электродвижущей силы синхронного генератора зависит от числа оборотов n ротора, регулировать ее путем изменения скорости вращения ротора невозможно, так как с числом оборотов ротора генератора связана частота электродвижущей силы, которая должна быть сохранена постоянной.
Следовательно, остается единственный способ регулировки величины электродвижущей силы синхронного генератора — это изменение основного магнитного потока Ф. Последнее обычно достигается путем регулирования тока возбуждения iв с помощью реостата, введенного в цепь возбуждения генератора. В том случае когда обмотка возбуждения питается током от генератора постоянного тока, сидящего на одном валу с данным синхронным генератором, ток возбуждения синхронного генератора регулируется изменением напряжения на зажимах генератора постоянного тока.
Зависимость электродвижущей силы Е синхронного генератора от тока возбуждения iв при постоянстве номинальной скорости вращения ротора ( n = const) и нагрузке, равной нулю ( 1 = 0), называется характеристикой холостого хода генератора.
На рисунке 1 приведена характеристика холостого хода генератора. Здесь восходящая ветвь 1 кривой снята при возрастании тока i в от нуля до i в m , а нисходящая ветвь 2 кривой — при изменении iв от iвm до iв = 0.
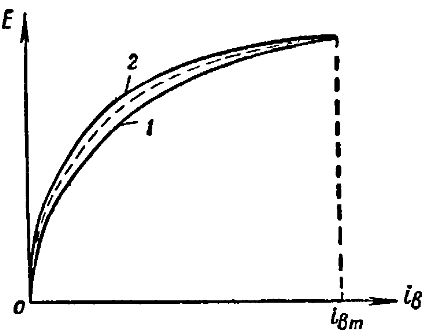
Рис. 1. Характеристика холостого хода синхронного генератора
Несовпадение восходящей 1 и нисходящей 2 ветвей объясняется остаточным магнетизмом. Чем больше площадь, ограниченная этими ветвями, тем больше потерь энергии в стали синхронного генератора на перемагничивание.
Крутизна подъема кривой холостого хода на ее начальном прямолинейном участке характеризует магнитную цепь синхронного генератора. Чем меньше расход ампер-витков в воздушных зазорах генератора, тем при прочих одинаковых условиях будет круче характеристика холостого хода генератора.
Внешняя характеристика генератора
Напряжение на зажимах нагруженного синхронного генератора зависит от электродвижущей силы Е генератора, от падения напряжения в активном сопротивлении его статорной обмотки, падения напряжения, обусловленного электродвижущей силой самоиндукции рассеяния Es, и падения напряжения, обусловленного реакцией якоря.
Электродвижущая сила рассеяния Es, как известно, зависит от магнитного потока рассеяния Ф s , который не проникает в магнитные полюса ротора генератора и, следовательно, не изменяет степени намагничивания генератора. Электродвижущая сила самоиндукции рассеяния Es генератора относительно мала, а поэтому практически ею можно пренебречь. В соответствии с этим ту часть электродвижущей силы генератора, которая компенсирует электродвижущую силу самоиндукции рассеяния Es, можно считать практически равной нулю.
Реакция якоря оказывает более заметное влияние на режим работы синхронного генератора и, в частности, на величину напряжения на его зажимах. Степень этого влияния зависит не только от величины нагрузки генератора, но и от характера нагрузки.
Рассмотрим вначале влияние реакции якоря синхронного генератора для случая, когда нагрузка генератора носит чисто активный характер. Для этой цели возьмем часть схемы работающего синхронного генератора, изображенную на рис. 2 ,а. Здесь показаны часть статора с одним активным проводником якорной обмотки и часть ротора с несколькими его магнитными полюсами.
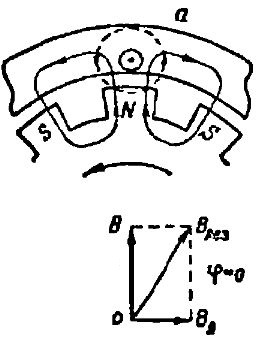
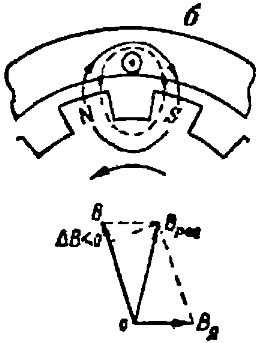
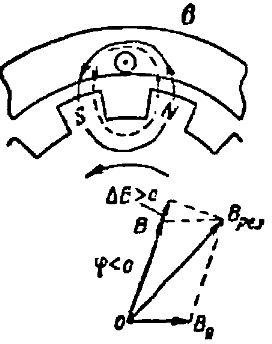
Рис. 2. Влияние реакции якоря для нагрузок: а — активного, б — индуктивного, в — емкостного характера
В рассматриваемый момент времени северный полюс одного из электромагнитов, вращающихся вместе с ротором против часовой стрелки, как раз проходит под активным проводником статорной обмотки.
Электродвижущая сила, индуктированная в этом проводнике, направлена к нам из-за плоскости рисунка. А так как нагрузка генератора носит чисто активный характер, то ток I в якорной обмотке совпадает по фазе с электродвижущей силой. Следовательно, в активном проводнике статорной обмотки ток течет к нам из-за плоскости рисунка.
Магнитные линии поля, создаваемого электромагнитами, показаны здесь сплошными линиями, а магнитные линии поля, создаваемого током провода якорной обмотки, — пунктирной линией.
Внизу на рис. 2 ,а показана векторная диаграмма магнитной индукции результирующего магнитного поля, находящегося над северным полюсом электромагнита. Здесь мы видим, что магнитная индукция В основного магнитного поля, создаваемого электромагнитом, имеет радиальное направление, а магнитная индукция В я магнитного поля тока якорной обмотки направлена вправо и перпендикулярно вектору В .
Результирующая магнитная индукция Врез направлена вверх и вправо. Это значит, что в результате сложения магнитных полей произошло некоторое искажение основного магнитного поля. Слева от северного полюса оно несколько ослабилось, а справа — несколько усилилось.
Нетрудно видеть, что радиальная составляющая вектора результирующей магнитной индукции, от которой по сути дела зависит величина индуктированной электродвижущей силы генератора, не изменилась. Следовательно, реакция якоря при чисто активной нагрузке генератора не влияет на величину электродвижущей силы генератора. Это значит, что и падение напряжения в генераторе при чисто активной нагрузке обусловлено только падением напряжения в активном сопротивлении генератора, если пренебречь электродвижущей силой самоиндукции рассеяния.
Теперь допустим, что нагрузка синхронного генератора носит чисто индуктивный характер. В этом случае ток I отстает по фазе от электродвижущей силы Е на угол π/2 . Это значит, что максимум тока возникает в проводе несколько позднее, чем максимум электродвижущей силы. Следовательно, когда в проводе якорной обмотки ток достигнет максимального значения, северный полюс N будет уже не под этим проводом, а сместится несколько дальше в направлении вращения ротора, как это показано на рис. 2 ,б.
В этом случае магнитные линии (пунктирные линии) магнитного потока якорной обмотки замыкаются через два соседних разноименных полюса N и S и направлены навстречу магнитным линиям основного магнитного поля генератора, создаваемого магнитными полюсами. Это приводит к тому, что основное магнитное пате не только искажается, но и делается несколько слабее.
На рис. 2,6 приведена векторная диаграмма магнитных индукций: основного магнитного поля В, магнитного поля, обусловленного реакцией якоря В я, и результирующего магнитного поля В рез.
Здесь мы видим, что радиальная составляющая магнитной индукции результирующего магнитного поля стала меньше магнитной индукции В основного магнитного поля на величину Δ В. Следовательно, стала меньше и индуктированная электродвижущая сила, так как она обусловлена радиальной составляющей магнитной индукции. А это значит, что напряжение на зажимах генератора при всех прочих равных условиях будет меньше, чем напряжение при чисто активной нагрузке генератора.
Если генератор имеет нагрузку чисто емкостного характера, то ток в нем опережает по фазе электродвижущую силу на угол π/2 . Ток в проводниках якорной обмотки генератора теперь достигает максимума раньше, чем электродвижущая сила Е. Следовательно, когда в проводе якорной обмотки (рис. 2,в) ток достигнет максимального значения, северный полюс N еще не подойдет под этот провод.
В этом случае магнитные линии (пунктирные линии) магнитного потока якорной обмотки замыкаются через два соседних разноименных полюса N и S и направлены попутно с магнитными линиями основного магнитного поля генератора. Это приводит к тому, что основное магнитное поле генератора не только искажается, но и несколько усиливается.
На рис. 2,в приведена векторная диаграмма магнитной индукции: основного магнитного поля В , магнитного поля, обусловленного реакцией якоря Вя, и результирующего магнитного поля B рез. Мы видим, что радиальная составляющая магнитной индукции результирующего магнитного поля стала больше магнитной индукции В основного магнитного поля на величину Δ В. Следовательно, увеличилась и индуктированная электродвижущая сила генератора.А это значит, что напряжение на зажимах генератора при всех прочих одинаковых условиях станет больше, чем напряжение при чисто индуктивной нагрузке генератора.
Выяснив влияние реакции якоря на электродвижущую силу синхронного генератора при различных по своему характеру нагрузках, перейдем к выяснению внешней характеристики генератора. Внешней характеристикой синхронного генератора называется зависимость напряжения U на его зажимах от нагрузки I при постоянной скорости вращения ротора (n = const), постоянстве тока возбуждения (i в = const) и постоянстве коэффициента мощности (cos φ = const).
На рис. 3 приведены внешние характеристики синхронного генератора для различных по своему характеру нагрузок. Кривая 1 выражает внешнюю характеристику при активной нагрузке (cos φ = 1,0). В этом случае напряжение на зажимах генератора падает при изменении нагрузки от холостого хода до номинальной в пределах 10 — 20% напряжения при холостом ходе генератора.
Кривая 2 выражает внешнюю характеристику при активно-индуктивной нагрузке (cos φ = 0 ,8). В этом случае напряжение на зажимах генератора падает быстрее из-за размагничивающего действия реакции якоря. При изменении нагрузки генератора от холостого хода до номинальной напряжение уменьшается в пределах 20 — 30% напряжения при холостом ходе.
Кривая 3 выражает внешнюю характеристику синхронного генератора при активно-емкостной нагрузке (cos φ = 0,8). В этом случае напряжение на зажимах генератора несколько растет из-за намагничивающего действия реакции якоря.
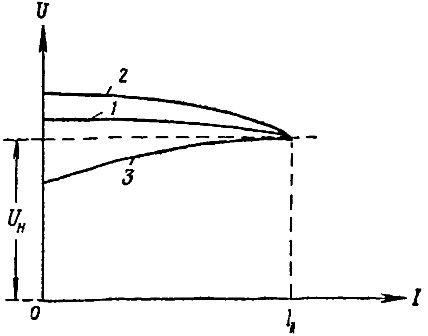
Рис. 3. Внешние характеристики генератора переменного тока для различных нагрузок: 1 — активной, 2 — индуктивной, 3 емкостной
Регулировочная характеристика синхронного генератора
Регулировочная характеристика синхронного генератора выражает зависимость тока возбуждения i в генератора от нагрузки I при постоянстве действующего значения напряжения на зажимах генератора (U = const), постоянстве числа оборотов ротора генератора в минуту ( n = const) и постоянстве коэффициента мощности (cos φ = const).
На рис. 4 приведены три регулировочные характеристики синхронного генератора. Кривая 1 относится к случаю активной нагрузки (cos φ = 1 ) .
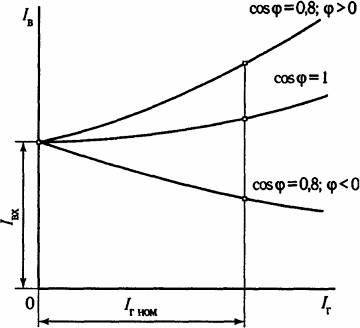
Рис. 4. Регулировочные характеристики генератора переменного тока для различных нагрузок: 1 — активной, 2 — индуктивной, 3 — емкостной
Здесь мы видим, что с ростом нагрузки I генератора ток возбуждения растет. Это понятно, так как с ростом нагрузки I увеличивается падение напряжения в активном сопротивлении якорной обмотки генератора и требуется увеличить электродвижущую силу Е генератора путем увеличения тока возбуждения i в , чтобы сохранить постоянство напряжения U.
Кривая 2 относится к случаю активно-индуктивной нагрузки при cos φ = 0 ,8 . Эта кривая поднимается круче, чем кривая 1, вследствие размагничивающего действия реакции якоря, снижающего величину электродвижущей силы Е, и, следовательно, напряжение U на зажимах генератора.
Кривая 3 относится к случаю активно-емкостной нагрузки при cos φ = 0,8. Эта кривая показывает, что с ростом нагрузки генератора требуется меньший ток возбуждения iв генератора для поддержания постоянства напряжения на его зажимах. Это понятно, так как в этом случае реакция якоря усиливает основной магнитный поток и, следовательно, способствует увеличению электродвижущей силы генератора и напряжения на его зажимах.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети: