КОМПАС-3D v22
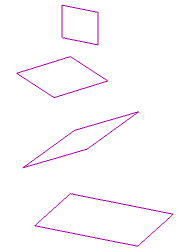
Одни и те же сечения можно соединить различными способами. Вы можете сделать траекторию замкнутой или разомкнутой, а также задать путь соединения сечений.
Замкнутая или разомкнутая траектория
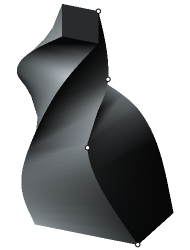
Траектория соединения сечений может быть замкнутой или разомкнутой. Для выбора нужного варианта служит опция Замкнуть траекторию . При включенной опции соединяются сечения, которые были указаны первым и последним.
• Если осевая линия не используется, то опция Замкнуть траекторию доступна при условии, что указано более двух сечений.
• Если осевая линия используется, то опция недоступна. При этом, если осевая линия замкнута, то опция включена, если разомкнута — опция выключена.


Разомкнутый и замкнутый элементы, построенные по одним и тем же сечениям
Задание соединяемых точек сечений
Точки сечений, соединяемые при построении элемента, определяются автоматически.
При необходимости вы можете вручную указать соединяемые точки сечений. Для этого используются элементы, расположенные в секции Соединение .

Чтобы задать соединяемые точки, нажмите кнопку Добавить цепочку (кнопка присутствует на Панели параметров, если указано два или более сечений). Запустится подпроцесс создания цепочки. Укажите положения точек цепочки на каждом сечении в графической области.
Создайте необходимое количество цепочек.
Перечень созданных цепочек отображается в поле Цепочки . Выбранная в списке цепочка подсвечивается в графической области. Если требуется отобразить на фантоме все цепочки, включите опцию Показать все в окне модели .
Чтобы отредактировать цепочку, воспользуйтесь одним из способов:

• выделите строку цепочки в поле Цепочки и нажмите кнопку Редактировать цепочку (кнопка появляется после выделения цепочки в списке); данный способ запускает подпроцесс создания цепочки,
• измените положения точек цепочки, перетащив их мышью в графической области.

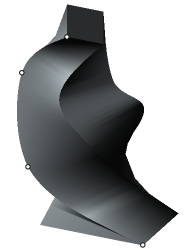
Элементы, образованные путем соединения разных точек одинаковых сечений
(соединенные точки выделены)
© ООО «АСКОН-Системы проектирования», 2023. Все права защищены. | Единая телефонная линия: 8-800-700-00-78
Может ли траектория быть замкнутой
Автор статьи не придумывает новые законы и ни в коем случае не пытается нарушить действующие.
Возможно ли переместить замкнутую механическую систему, на которую не действуют внешние силы?
Существует «Теорема об изменении количества движения механической системы«: Производная по времени вектора количества движения системы материальных точек равна главному вектору всех внешних сил, действующих на систему.
- Внутренние силы непосредственно не влияют на изменение количества движения материальной системы.
- Если главный вектор всех внешних сил, действующих на систему, равен нулю, то вектор количества движения материальной системы остается постоянным по величине и направлению.
Следствия (2,3), собственно, и называют законом сохранения количества движения.
Для замкнутой системы, то есть системы, не испытывающей внешних воздействий, или в случае, когда геометрическая сумма действующих на систему внешних сил равна нулю, имеет место закон сохранения количества движения.
При этом количество движения отдельных частей системы (например, под действием внутренних сил) могут изменяться, но так, что величина остаётся постоянной.
Закон сохранения количества движения нельзя нарушить.
И его нельзя обойти.
А нельзя ли его использовать для решения задачи, на первый взгляд, противоречащей этому закону?
Предлагаю вашему вниманию следующую схему рассуждений:
Показанное на Рис.1 перемещение тела не может быть осуществлено без участия в данном процессе другого тела.
Поскольку количество движения тела, в проекции на оси координат, постоянно изменяется и отличается от нуля.
Связанные между собой неразрывной и нерастяжимой связью тела могут перемещаться так, как изображено на Рис.2.
При таком движении, тела будут двигаться по окружностям, радиусы которых обратно пропорциональны своим массам.
Это — следствие закона сохранения импульса.
В данном случае, суммарный импульс системы равен нулю.
Вот как это выглядело бы в случае двух «реальных» объектов (Рис.3).
Назовем одно из них «корпус», а другое — «рабочее тело», или «рабочее вещество».
Если в относительном перемещении внутри (вокруг) корпуса примут участие два рабочих тела (имеющих одинаковые массы и скорости относительного перемещения) (Рис.4), то в таком случае, корпус не приобретет вращательное движение.
В данном случае, суммарный импульс двух рабочих тел в проекции на ось Х равен нулю.
Поэтому, импульс корпуса, в проекции на ту же ось, так же будет равен нулю.
Корпус будет совершать возвратно-поступательные движения относительно центра масс всей системы тел.
Перемещение корпуса будет осуществляться вдоль одной оси «абсолютной», неподвижной системы координат.
В системе координат, связанной с корпусом, рабочие тела перемещаются по окружности.
В неподвижной системе координат, рабочие тела перемещаются по эллиптической траектории.
Придать кинетическую энергию компонентам механической системы можно за счет преобразования других видов энергии, включенных в замкнутую систему.
То есть, организовать относительные перемещения компонентов системы можно за счет внутренних сил.
При этом центр масс всей системы всегда будет оставаться на месте, то есть не изменять своих координат (или двигаться прямолинейно и равномерно).
Видоизменим систему, показанную на Рис.1 .
Используем не «точечное» тело, а равномерно распределенную, на некотором участке траектории, рабочую массу (Рис.5).
При равномерном относительном перемещении «корпус» и «рабочая масса» будут двигаться по окружностям, радиусы которых обратно пропорциональны своим массам (Рис.6). Под радиусом траектории рабочей массы необходимо подразумевать радиус траектории движения центра масс (ЦМ) рабочей массы (красная точка на рисунке).
Вот как это выглядело бы для «реальной» системы тел.(Рис.7)
Аналогично (Рис.4), можно использовать в системе несколько рабочих масс для уравновешивания момента импульса.(Рис.8)
Опять таки, центр масс всей системы неподвижен.
А что произойдет, если рабочая масса будет равномерно и неразрывно заполнять всю траекторию перемещения?(Рис.9)
Центр масс рабочей массы совпадает с центром масс корпуса.
Суммарный импульс распределенной рабочей массы в проекции на все оси координат равен нулю.
Поэтому равен нулю и импульс корпуса.
Центры масс компонентов системы не перемещаются относительно друг друга.
Система стабильно неподвижна.
При этом мы можем передать движущейся рабочей массе значительную кинетическую энергию.
«Интересное» начинается, когда мы начинаем останавливать движущуюся рабочую массу в определенной точке траектории.(Рис.10)
Останавливаем — это означает, в данном случае,- последовательное «соединение» всех элементарных частиц рабочей массы с корпусом.
То есть частицы рабочей массы в определенной точке траектории последовательно приобретают скорость корпуса, теряя скорость относительного перемещения. При этом, остальная часть рабочей массы продолжает перемещаться, пока все ее частицы не приобретут скорость корпуса.
Например, перемещая некоторую жидкость по замкнутой траектории, мы, вдруг, начинаем ее собирать в емкость, неподвижно закрепленную в корпусе.
На анимированном рисунке красным цветом обозначен условный ЦМ рабочей массы. Зеленым — траектория перемещения ЦМ в своем относительном перемещении относительно «корпуса».
Перемещение радиус-вектора ЦМ рабочей массы можно рассматривать, как перемещение маятника переменной массы и переменной длины. (В системе координат, связанной с корпусом.) (Рис.11)
Вот тут и определилась интересная задача:
рассчитать, как перемещаются компоненты системы?
Расчеты привели к следующему результату (Рис.12).
После завершения цикла остановки всей рабочей массы, ЦМ всей системы оказывается смещенным относительно своего начального положения. Система перемещается в полном соответствии с законом сохранения количества движения!
Можно сказать иначе: Для того, чтобы выполнялся закон сохранения количества движения, центр масс данной механической системы обязан переместиться измениться.
Первый расчет выполнен, исходя из закона сохранения импульса.
Второй — с помощью уравнений Лагранжа II рода.
В решении этой задачи совершенно не рассматриваются внутренние взаимодействия компонентов системы.
Никаких «сил инерции»!
Только кинетическое и энергетическое состояние системы.
На Рис.12 добавлен заключительный, дополнительный этап — сведение центров масс корпуса и рабочей массы в одну точку. Это необходимо для более наглядного представления всего цикла движения, с возможностью повторения этого цикла. Красная линия на рисунке обозначает траекторию перемещения ЦМ всей системы, синяя — ЦМ корпуса.
Математические расчеты, описывающие данное предполагаемое явление, вы можете посмотреть по адресу: https://varipend.narod.ru
23 декабря 2006
З ащищено законодательством Российской Федерации по авторским правам.
Никакая часть сайта не может быть воспроизведена в какой бы то ни было форме и какими бы то ни было средствами без письменного разрешения владельца авторских прав .
Если тело совершило движение по замкнутой траектории, то его механическая работа
Не может быть рассчитана, потому как не указано, ПРОТИВ ЧЕГО оно совершило работу.
И дело тут даже не в том, какое поле, а в том, что могут быть диссипативные потери энергии, вообще ни с каким полем не связанные. Например, потери на трение. Ежели, к примеру, вы протащили шкаф по полу с места на место и потом вернули его обратно, то изменение энергии шкафа — да — равно нулю, а вот СОВЕРШЁННАЯ РАБОТА нулю никак не равна.
Остальные ответы
равна нулю
(если тело пришло в туже точку с которой начала движение, ну тоесть по кругу)
0(работа сил по замкнутой траектории)
Как сдвинуть сечение по замкнутой полилинии?
Пробовал сделать это командой «Сдвиг», но она похоже выполняет сдвиг только по незамкнутой траектории.
Просмотров: 2601
software quality engineer
Регистрация: 19.09.2009
Харьков, Украина
Сообщений: 435
Вот только что сделал.
Какой AutoCAD стоит? Пробовал в чистом новом документе?
__________________
energokot.blogspot.com
Регистрация: 04.07.2017
Сообщений: 118
Сообщение от Marsikus
Вот только что сделал.
Какой AutoCAD стоит? Пробовал в чистом новом документе?
Версия 2017 года. В новом чистом документе все получается. А вот в рабочем документе пишет почему-то: «Криволинейная траектория не должна быть самопересекающейся»; «Выбранная криволинейная траектория недействительна».
Или вот еще:
«Выберите объекты для сдвига или [РEжим]: найдено: 1
Выберите объекты для сдвига или [РEжим]:
Выберите траекторию сдвига или [вЫравнивание/Базовая точка/Масштаб/Закручивание]:
Ошибка операции моделирования:
Невозможно замкнуть элемент сдвига по замкнутой траектории.
Сдвиг 1 выбранных объектов невозможен. «
Интересно, чтобы это значило.
software quality engineer
Регистрация: 19.09.2009
Харьков, Украина
Сообщений: 435
А вот то и значит, что написано )
Получил такую же ошибку, сделав явно самопересекающуюся траекторию.
__________________
energokot.blogspot.com