18 . Принцип работы трехфазного асинхронного двигателя с короткозамкнутым ротором.

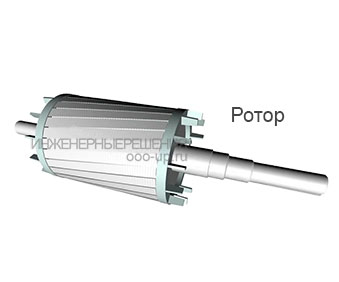
Ротор асинхронного двигателя представляет собой стальной цилиндрический сердечник, собранный из пластин электротехнической стали (см. рис. 8.1), с пазами, в которые уложена обмотка в виде «беличьего колеса» (рис. 8.2). Здесь каждая пара диаметрально противоположных стержней с соединительными кольцами представляет собой рамку, т. е. короткозамкнутый виток. Поэтому такой ротор называется короткозамкнутым.
Таким образом, если способное вращаться вокруг оси «беличье колесо» поместить во вращающееся магнитное поле, то по закону электромагнитной индукции в его стержнях возникнут ЭДС и в короткозамкнутых витках возникнут токи. Эти токи, взаимодействуя согласно закону Ампера с вращающимся магнитным полем, создадут вращающий момент и приведут «беличье колесо» в асинхронное вращение в ту же сторону, что и поле. Для увеличения вращающего момента короткозамкнутый ротор помещен внутри стального сердечника.
19. Объясните создание вращающегося магнитного поля трехфазной обмоткой машины переменного тока.
Если три катушки, расположенные по окружности под углом 120° друг относительно друга, включить в трехфазную сеть переменного тока, а в центре этой окружности поместить магнитную стрелку на оси, то стрелка придет во вращение. Следовательно, эти три катушки создают вращающееся магнитное поле.

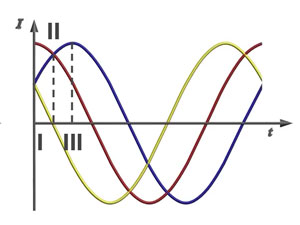
Рассмотрим подробнее механизм создания вращающегося магнитного поля. Зависимости токов в катушках от времени изображены на рис. 8.3. Выберем четыре момента времени t1,t2,t3 и t4 через одну шестую часть периода.

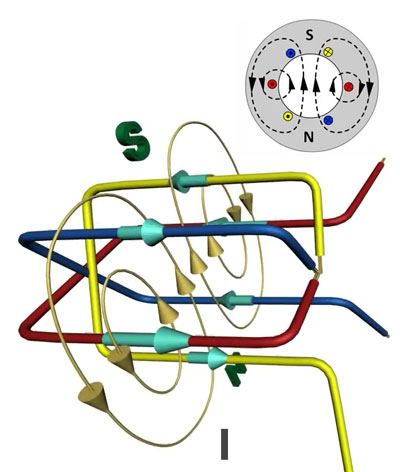
Для каждого из этих моментов последовательно изобразим направления результирующего магнитного поля внутри статора трехфазной машины, которая имеет три обмотки по одному витку (рис. 8.4). Начала обмоток обозначены буквами А, В и С, а концы — X, У и Z соответственно. Ток в начале обмотки будем считать направленным к нам (обозначается точкой), если его значение положительно. Крестиком обозначено направление от нас.
В момент времени t1 обмотка А~Х потока не создает
(1а = 0); в начале обмотки В ток направлен от нас (iв 0), а в конце этой обмотки Y — к нам; в начале обмотки С ток
направлен к нам (ic > 0), а в конце этой обмотки Z — от нас.
Таким образом в двух расположенных рядом проводниках С и Y, перпендикулярных к плоскости чертежа, токи в момент t1 направлены в одну сторону и создают магнитное поле,
направленное по правилу буравчика против часовой стрелки, а токи в проводниках В и Z создают магнитное поле, направленное по часовой стрелке. Оба магнитных поля в центре статора имеют одинаковое направление (вверх) и складываются. Направление суммарного магнитного поля показано на рис. 8.4 стрелкой.
Определяя аналогичным образом направление суммарного
магнитного поля в моменты времени t2,t3 и t4, мы увидим,
что направление магнитного поля за половину периода изменится на 180°. Легко убедиться, что за период направление суммарного магнитного поля сделает один оборот и, следовательно, скорость вращения магнитного поля в данном случае будет равна частоте переменного тока.
Таким образом, внутри статора существует постоянное по значению равномерно вращающееся магнитное поле.
Этот способ создания вращающегося магнитного поля положен в основу устройства трехфазных асинхронных двигателей. Если поменять две любые фазы местами (при этом изменится последовательность токов), то суммарный вектор
магнитной индукции В будет вращаться против часовой стрелки. Изменением последовательности фаз пользуются для изменения направления вращения ротора трехфазного асинхронного двигателя, т. е. для реверсирования.
Вращающееся магнитное поле. Принцип действия асинхронного и синхронного двигателей.
Как было показано ранее, одним из важнейших преимуществ многофазных систем является получение вращающегося магнитного поля с помощью неподвижных катушек, на чем основана работа двигателей переменного тока. Рассмотрение этого вопроса начнем с анализа магнитного поля катушки с синусоидальным током.
Магнитное поле катушки с синусоидальным током
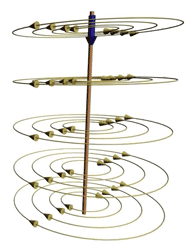
При пропускании по обмотке катушки синусоидального тока она создает магнитное поле, вектор индукции которого изменяется (пульсирует) вдоль этой катушки также по синусоидальному закону Мгновенная ориентация вектора магнитной индукции в пространстве зависит от намотки катушки и мгновенного направления тока в ней и определяется по правилу правого буравчика. Так для случая, показанного на рис. 1, вектор магнитной индукции направлен по оси катушки вверх. Через полпериода, когда при том же модуле ток изменит свой знак на противоположный, вектор магнитной индукции при той же абсолютной величине поменяет свою ориентацию в пространстве на 1800. С учетом вышесказанного магнитное поле катушки с синусоидальным током называют пульсирующим.
Круговое вращающееся магнитное поле
двух- и трехфазной обмоток
Круговым вращающимся магнитным полем называется поле, вектор магнитной индукции которого, не изменяясь по модулю, вращается в пространстве с постоянной угловой частотой.
- Оси катушек должны быть сдвинуты в пространстве друг относительно друга на определенный угол (для двухфазной системы – на 90 0 , для трехфазной – на 120 0 ).
- Токи, питающие катушки, должны быть сдвинуты по фазе соответственно пространственному смещению катушек.
Рассмотрим получение кругового вращающегося магнитного поля в случае двухфазной системы Тесла (рис. 2,а).
При пропускании через катушки гармонических токов каждая из них в соответствии с вышесказанным будет создавать пульсирующее магнитное поле. Векторы и , характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону. Если ток в катушке В отстает от тока в катушке А на 90 0 (см. рис. 2,б), то .
Найдем проекции результирующего вектора магнитной индукции на оси x и y декартовой системы координат, связанной с осями катушек:
Модуль результирующего вектора магнитной индукции в соответствии с рис. 2,в равен
при этом для тангенса угла a , образованного этим вектором с осью абсцисс, можно записать
Полученные соотношения (1) и (2) показывают, что вектор результирующего магнитного поля неизменен по модулю и вращается в пространстве с постоянной угловой частотой , описывая окружность, что соответствует круговому вращающемуся полю.
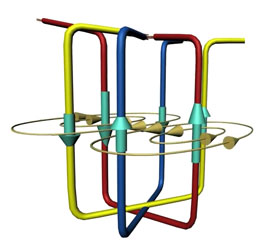
Покажем, что симметричная трехфазная система катушек (см. рис. 3,а) также позволяет получить круговое вращающееся магнитное поле.
Каждая из катушек А, В и С при пропускании по ним гармонических токов создает пульсирующее магнитное поле. Векторная диаграмма в пространстве для этих полей представлена на рис. 3,б. Для проекций результирующего вектора магнитной индукции на
оси декартовой системы координат, ось y у которой совмещена с магнитной осью фазы А, можно записать
Приведенные соотношения учитывают пространственное расположение катушек, но они также питаются трехфазной системой токов с временным сдвигом по фазе на 1200. Поэтому для мгновенных значений индукций катушек имеют место соотношения
Подставив эти выражения в (3) и (4), получим:
В соответствии с (5) и (6) и рис. 2,в для модуля вектора магнитной индукции результирующего поля трех катушек с током можно записать:
а сам вектор составляет с осью х угол a, для которого
Таким образом, и в данном случае имеет место неизменный по модулю вектор магнитной индукции, вращающийся в пространстве с постоянной угловой частотой , что соответствует круговому полю.
Магнитное поле в электрической машине
С целью усиления и концентрации магнитного поля в электрической машине для него создается магнитная цепь. Электрическая машина состоит из двух основных частей (см. рис. 4): неподвижного статора и вращающегося ротора, выполненных соответственно в виде полого и сплошного цилиндров.
На статоре расположены три одинаковые обмотки, магнитные оси которых сдвинуты по расточке магнитопровода на 2/3 полюсного деления , величина которого определяется выражением
где — радиус расточки магнитопровода, а р – число пар полюсов (число эквивалентных вращающихся постоянных магнитов, создающих магнитное поле, — в представленном на рис. 4 случае р=1).
На рис. 4 сплошными линиями (А, В и С) отмечены положительные направления пульсирующих магнитных полей вдоль осей обмоток А, В и С.
Приняв магнитную проницаемость стали бесконечно большой, построим кривую распределения магнитной индукции в воздушном зазоре машины, создаваемой обмоткой фазы А, для некоторого момента времени t (рис. 5). При построении учтем, что кривая изменяется скачком в местах расположения катушечных сторон, а на участках, лишенных тока, имеют место горизонтальные участки.
Заменим данную кривую синусоидой (следует указать, что у реальных машин за счет соответствующего исполнения фазных обмоток для результирующего поля такая замена связана с весьма малыми погрешностями). Приняв амплитуду этой синусоиды для выбранного момента времени t равной ВА, запишем
С учетом гармонически изменяющихся фазных токов для мгновенных значений этих величин при сделанном ранее допущении о линейности зависимости индукции от тока можно записать
Подставив последние соотношения в (7)…(9), получим
Просуммировав соотношения (10)…(12), с учетом того, что сумма последних членов в их правых частях тождественно равна нулю, получим для результирующего поля вдоль воздушного зазора машины выражение
представляющее собой уравнение бегущей волны.
Магнитная индукция постоянна, если . Таким образом, если мысленно выбрать в воздушном зазоре некоторую точку и перемещать ее вдоль расточки магнитопровода со скоростью
то магнитная индукция для этой точки будет оставаться неизменной. Это означает, что с течением времени кривая распределения магнитной индукции, не меняя своей формы, перемещается вдоль окружности статора. Следовательно, результирующее магнитное поле вращается с постоянной скоростью. Эту скорость принято определять в оборотах в минуту:
Принцип действия асинхронного и синхронного двигателей
Устройство асинхронного двигателя соответствует изображению на рис. 4. Вращающееся магнитное поле, создаваемое расположенными на статоре обмотками с током, взаимодействует с токами ротора, приводя его во вращение. Наибольшее распространение в настоящее время получил асинхронный двигатель с короткозамкнутым ротором ввиду своей простоты и надежности. В пазах ротора такой машины размещены токонесущие медные или алюминиевые стержни. Концы всех стержней с обоих торцов ротора соединены медными или алюминиевыми же кольцами, которые замыкают стержни накоротко. Отсюда и произошло такое название ротора.
В короткозамкнутой обмотке ротора под действием ЭДС, вызываемой вращающимся полем статора, возникают вихревые токи. Взаимодействуя с полем, они вовлекают ротор во вращение со скоростью , принципиально меньшей скорости вращения поля Отсюда название двигателя — асинхронный.
называется относительным скольжением . Для двигателей нормального исполнения S=0,02…0,07. Неравенство скоростей магнитного поля и ротора становится очевидным, если учесть, что при вращающееся магнитное поле не будет пересекать токопроводящих стержней ротора и, следовательно, в них не будут наводиться токи, участвующие в создании вращающегося момента.
Принципиальное отличие синхронного двигателя от асинхронного заключается в исполнении ротора. Последний у синхронного двигателя представляет собой магнит, выполненный (при относительно небольших мощностях) на базе постоянного магнита или на основе электромагнита. Поскольку разноименные полюсы магнитов притягиваются, то вращающееся магнитное поле статора, которое можно интерпретировать как вращающийся магнит, увлекает за собой магнитный ротор, причем их скорости равны. Это объясняет название двигателя – синхронный.
В заключение отметим, что в отличие от асинхронного двигателя, у которого обычно не превышает 0,8…0,85, у синхронного двигателя можно добиться большего значения и сделать даже так, что ток будет опережать напряжение по фазе. В этом случае, подобно конденсаторным батареям, синхронная машина используется для повышения коэффициента мощности.
- Основы теории цепей: Учеб. для вузов /Г.В.Зевеке, П.А.Ионкин, А.В.Нетушил, С.В.Страхов. –5-е изд., перераб. –М.: Энергоатомиздат, 1989. -528с.
- Бессонов Л.А. Теоретические основы электротехники: Электрические цепи. Учеб. для студентов электротехнических, энергетических и приборостроительных специальностей вузов. –7-е изд., перераб. и доп. –М.: Высш. шк., 1978. –528с.
- Теоретические основы электротехники. Учеб. для вузов. В трех т. Под общ. ред. К.М.Поливанова. Т.1. К.М.Поливанов. Линейные электрические цепи с сосредоточенными постоянными. –М.: Энергия- 1972. –240с.
- Какое поле называется пульсирующим?
- Какое поле называется вращающимся круговым?
- Какие условия необходимы для создания кругового вращающегося магнитного поля?
- Какой принцип действия у асинхронного двигателя с короткозамкнутым ротором?
- Какой принцип действия у синхронного двигателя?
- На какие синхронные скорости выпускаются в нашей стране двигатели переменного тока общепромышленного исполнения?
Трехфазный асинхронный двигатель
Трехфазный асинхронный электродвигатель — это асинхронный электродвигатель, который имеет трехфазную обмотку статора.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с короткозамкнутым ротором — это асинхронный электродвигатель, у которого ротор выполнен с короткозамкнутой обмоткой в виде беличьей клетки [1].
Конструкция асинхронного электродвигателя
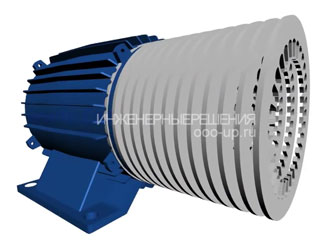
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
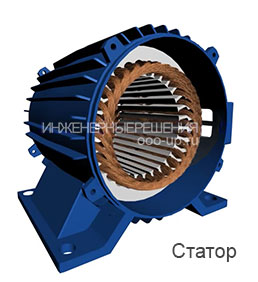
Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.

Ротор состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.
Остановить
Вращающееся магнитное поле асинхронного электродвигателя
Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
- где n1 – частота вращения магнитного поля статора, об/мин,
- f1 – частота переменного тока, Гц,
- p – число пар полюсов
Концепция вращающегося магнитного поля
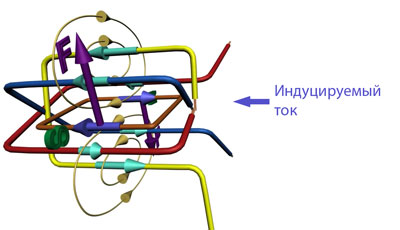
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени
Остановить
Магнитное поле прямого проводника с постоянным током
Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.
Действие вращающегося магнитного поля на замкнутый виток
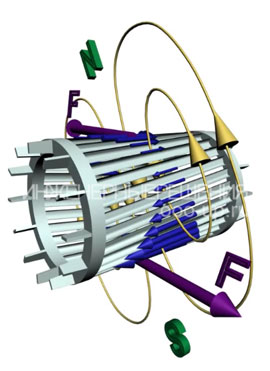
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.

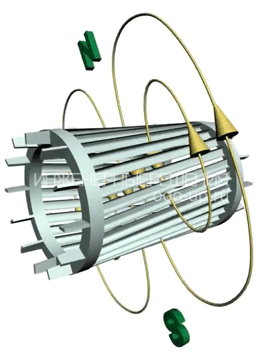
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля. Изменение тока в стержнях будет изменяться со временем.
Остановить
Вращающееся магнитное поле пронизывающее короткозамкнутый ротор
Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n21. Частота вращения поля статора относительно ротора определяется частотой скольжения ns=n1-n2. Отставание ротора от вращающегося поля статора характеризуется относительной величиной s, называемой скольжением:
- где s – скольжение асинхронного электродвигателя,
- n1 – частота вращения магнитного поля статора, об/мин,
- n2 – частота вращения ротора, об/мин,
Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0—100%. Если s~0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 — режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%.
Преобразование энергии
Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Подключение асинхронного двигателя
Трехфазный переменный ток
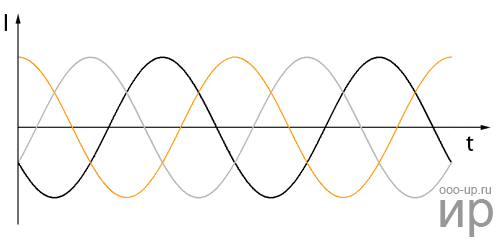
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным преимуществом трехфазной системы по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме «звезда» или «треугольник» в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы. Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль).
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
 |
 |
Uл, Uф — линейное и фазовое напряжение, В, |
 |
 |
Iл, Iф — линейный и фазовый ток, А, |
 |
 |
S — полная мощность, Вт |
 |
|
P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А. Полная потребляемая мощность:
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
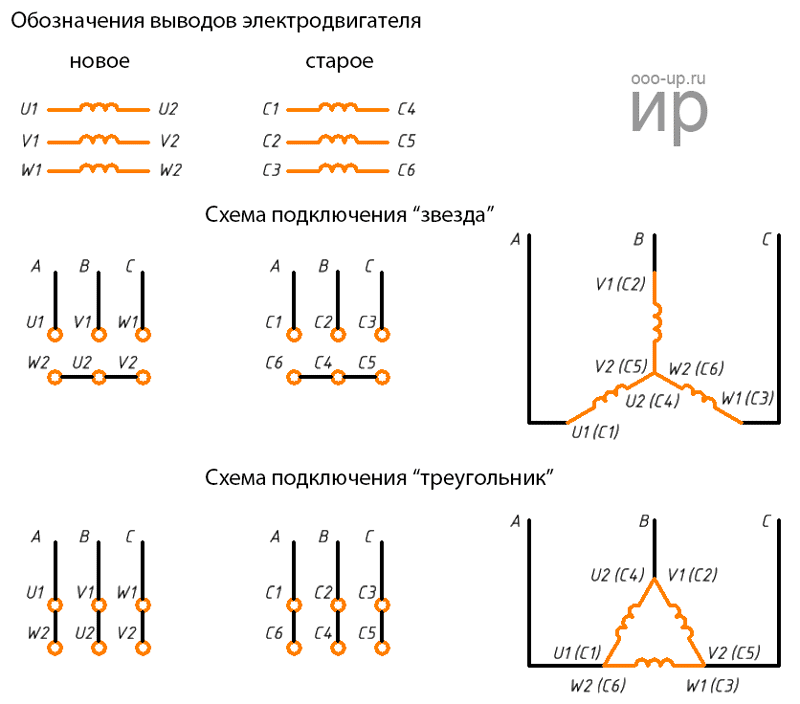
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85 [2]
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W | |
Обозначение выводов обмоток статора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | 0 | |
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 | |
Подключение трехфазного асинхронного двигателя к однофазной сети с помощью фазосдвигающего элемента
Трехфазные асинхронные электродвигатели могут быть подключены к однофазной сети с помощью фазосдвигаюших элементов. При этом электродвигатель будет работать либо в режиме однофазного двигателя с пусковой обмоткой (рисунок а, б, г) либо в режиме конденсаторного двигателя с постоянно включенным рабочим конденсатором (рисунок в, д, е).
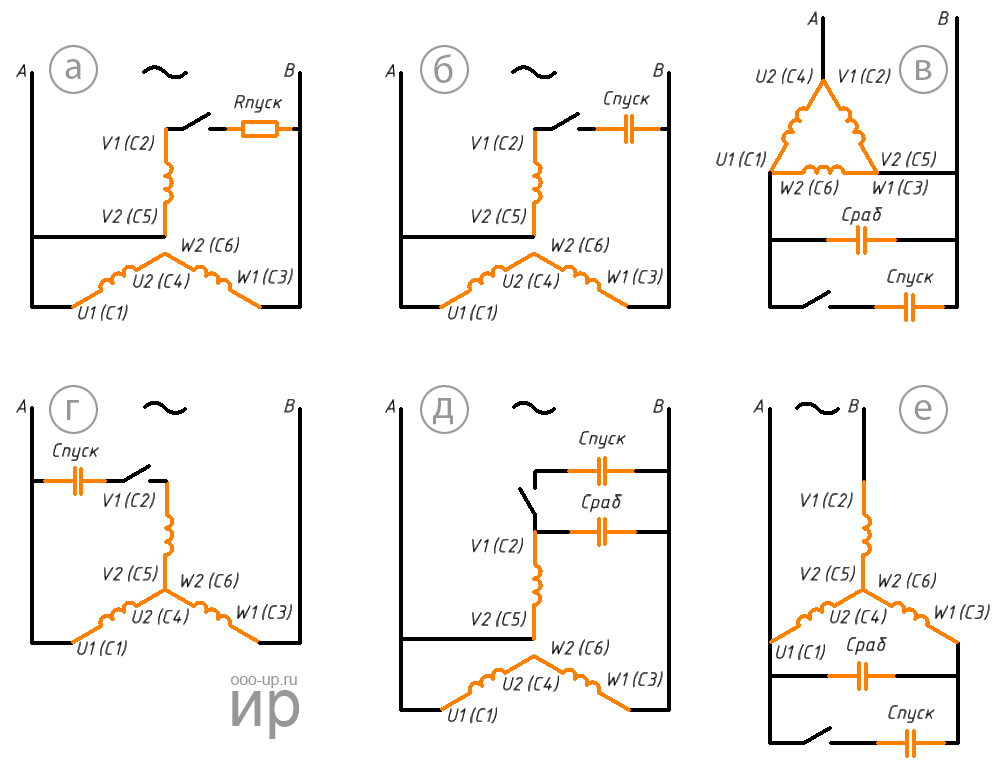
Схемы приведенные на рисунке «а», «б», «д» применяются, когда выведены все шесть концов обмотки. Электродвигатели с соединением обмоток согласно схемам «а», «б», «г» практически равноценны двигателям, которые спроектированы как однофазные электродвигатели с пусковой обмоткой. Номинальная мощность при этом состовляет 40-50% от мощности в трехфазном режиме, а при работе с рабочим конденсатором 75-80%.
Емкость рабочего конденсатора при частоте тока 50 Гц для схем «в», «д», «е» примерно рассчитывается соответственно по формулам:
- ,где Cраб — емкость рабочего конденсатора, мкФ,
- Iном – номинальный (фазный) ток статора трехфазного двигателя, А,
- U1 – напряжение однофазной сети, В.
Управление асинхронным двигателем
-
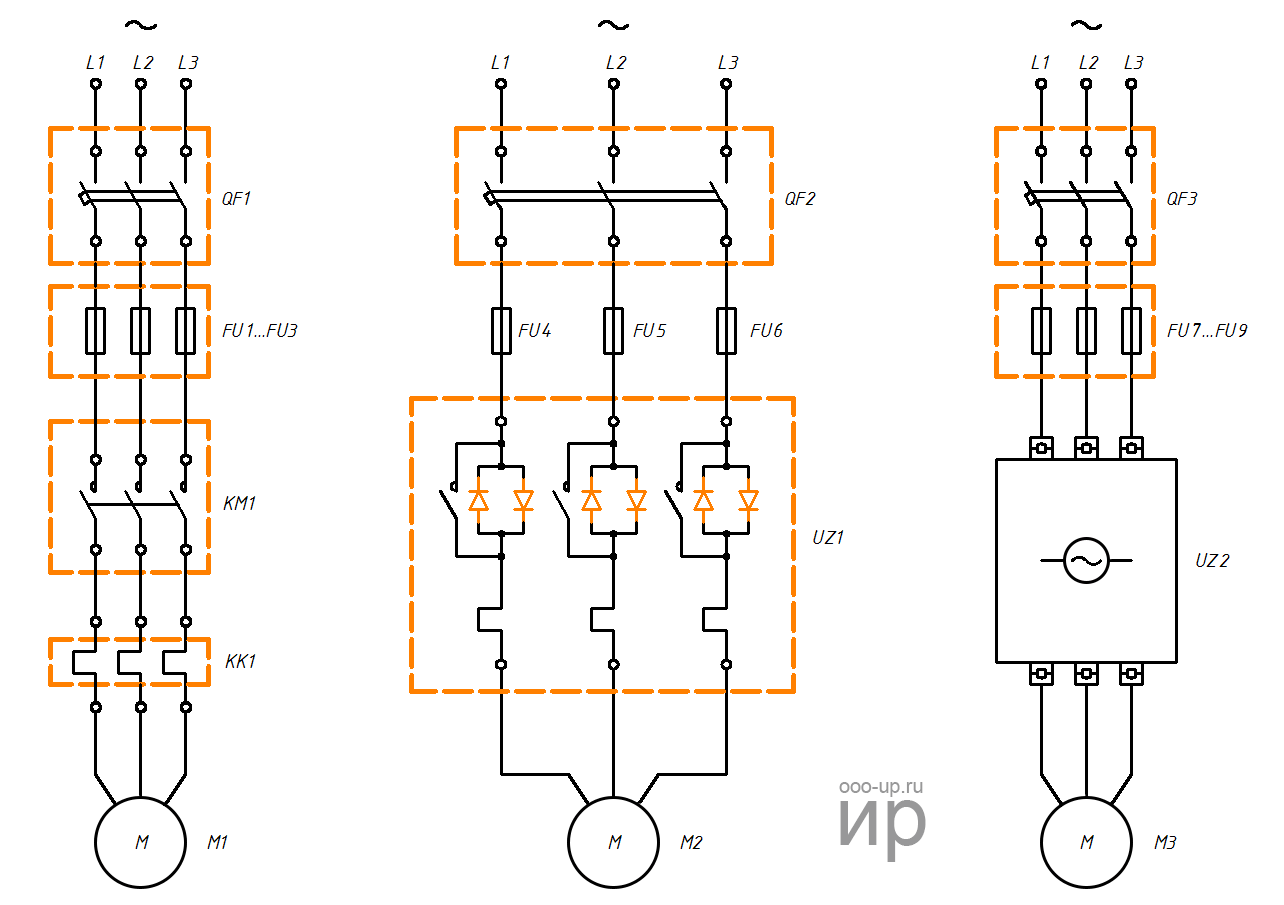
Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты
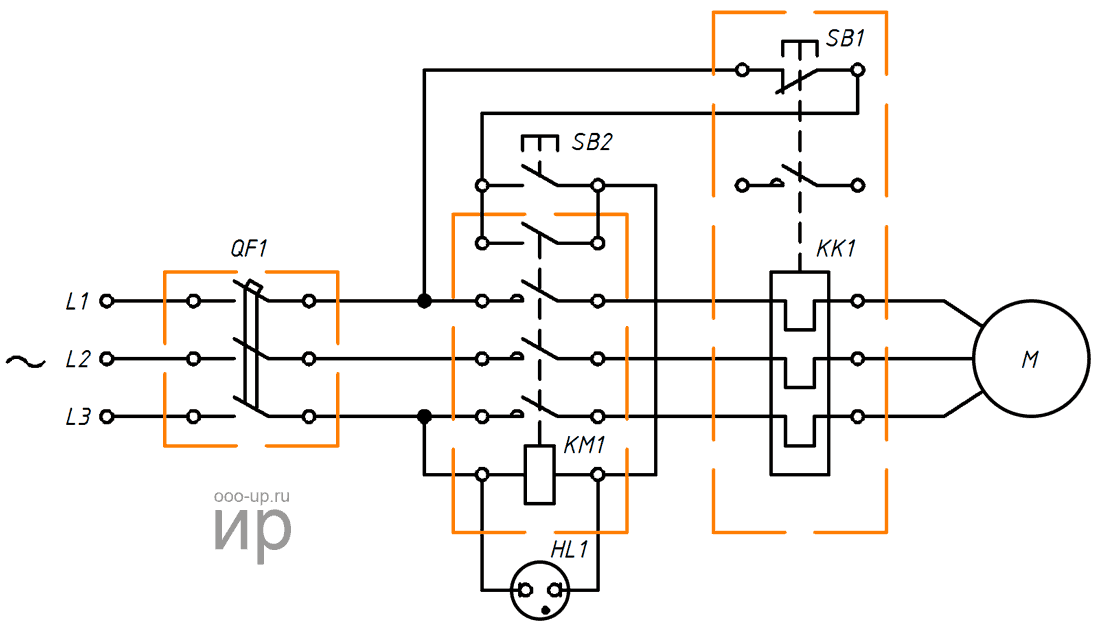
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Нереверсивная схема
Реверсивная схема
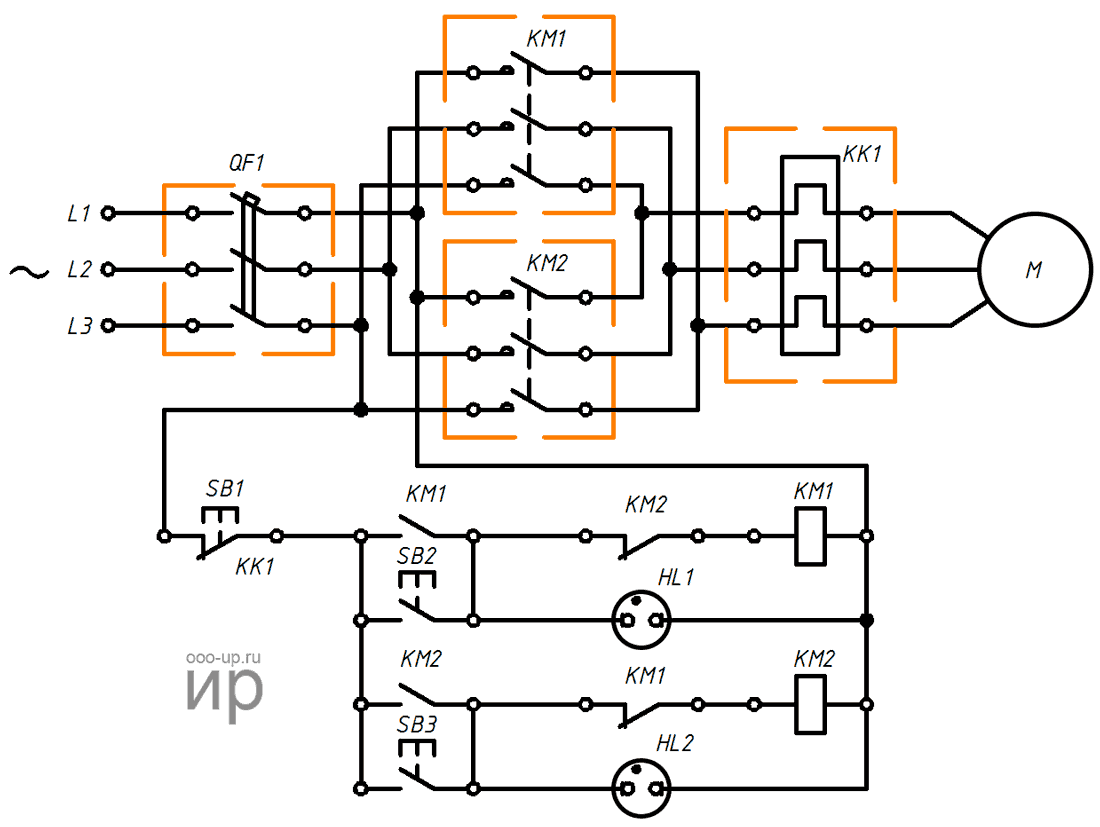
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
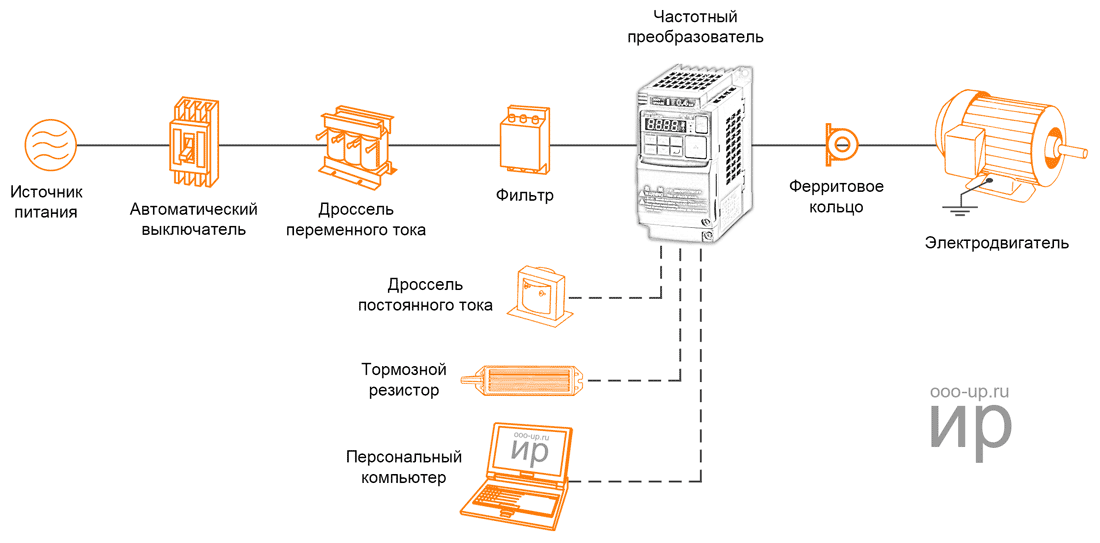
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
-
Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
-
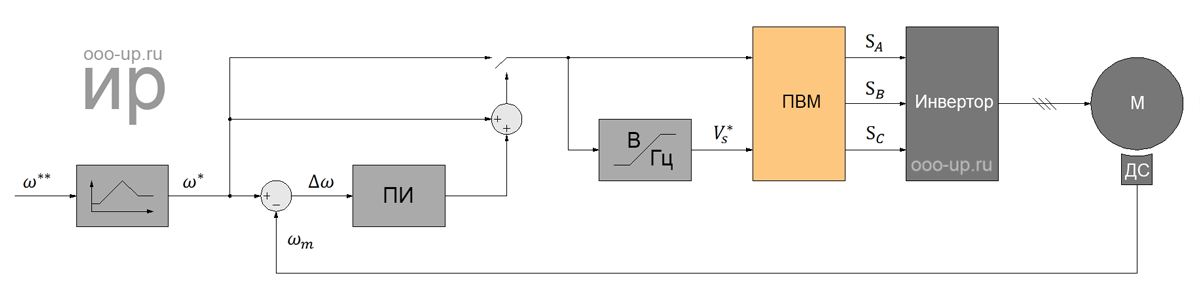
В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
- скалярное управление;
- векторное управление.
Скалярное управление является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
Векторное управление используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.
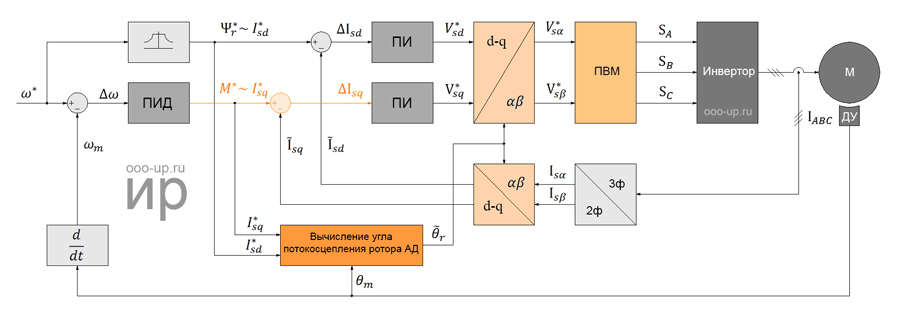
Полеориентированное управление позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
-
По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
- полеориентированное управление по датчику;
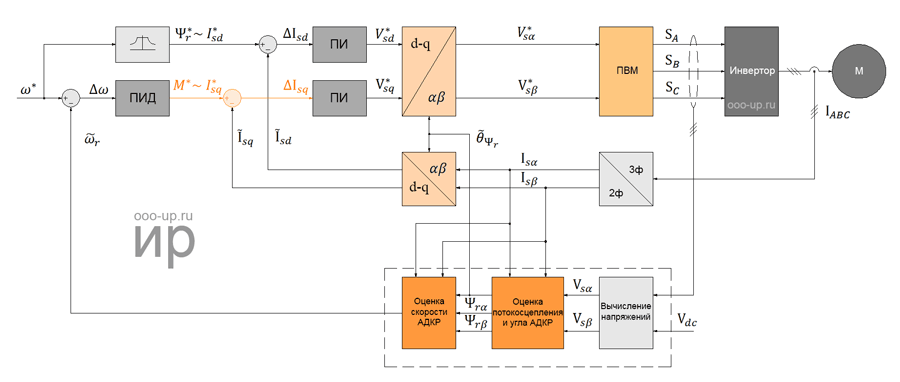
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).
Прямое управление моментом имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.
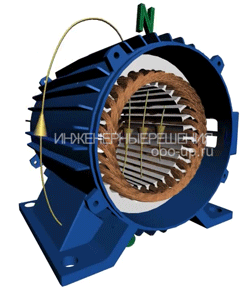
Трехфазный асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором — асинхронный двигатель, у которого обмотка ротора присоединена к контактным кольцам [1].
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.

Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85 [2]
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M | |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | Р1 | |
| вторая фаза | Р2 | |
| третья фаза | Р3 | |
| нулевая точка | 0 | |
| Соединение треугольником (число выводов 3) | ||
| первый вывод | Р1 | |
| второй вывод | Р2 | |
| третий вывод | Р3 | |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.
Пуск АДФР
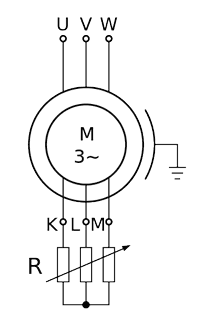
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов [3].
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
Классификация и устройство машин переменного тока
Машины переменного тока по количеству фаз делятся на много фазные и однофазные. Наиболее часто машины выполняются трехфазными в соответствии с применяемой в энергетических установках системой трехфазного тока. Для автоматических устройств и для бытовых электроприборов применяются двухфазные машины и иногда однофазные. В основе работы многофазных машин и некоторых однофазных лежит образование вращающегося магнитного поля.
Каждая машина переменного тока, так же как машина постоянного тока, состоит из статора и ротора. По способу образования магнитного поля статора и ротора машины переменного тока делятся на две группы: асинхронные и синхронные.
А. Асинхронная машина. Асинхронной машиной называется машина переменного тока, у которой скорость вращения ротора зависит от нагрузки. Магнитное поле в асинхронной машине создается переменным током обмоток статора и ротора. Скорость вращения ротора отличается от скорости вращения поля.
Асинхронные машины делятся на бесколлекторные и коллекторные. Бесколлекторные асинхронные машины являются наиболее распространенными электрическими машинами в народном хозяйстве и применяются главным образом в качестве двигателей. Коллекторные асинхронные машины имеют большее разнообразие характеристик по сравнению с бесколлекторными, используются также в качестве двигателей, но имеют ограниченное применение.
Основным типом асинхронной бесколлекторной машины является трехфазный двигатель в двух главных исполнениях: двигатель с фазной обмоткой ротора (рис. 1,а) и двигатель с короткозамкнутой обмоткой ротора (рис. 1,6). Конструктивные схемы этих машин показаны на рис. 1, где 1 — сердечник статора, собранный из листовой электротехнической стали, 2 — трехфазная обмотка статора, включаемая в сеть переменного тока, 3 — сердечник ротора, 4 — фазная обмотка ротора, 5 — контактные кольца для соединения с пусковым или регулировочным реостатом, 6 — короткозамкнутая обмотка ротора. 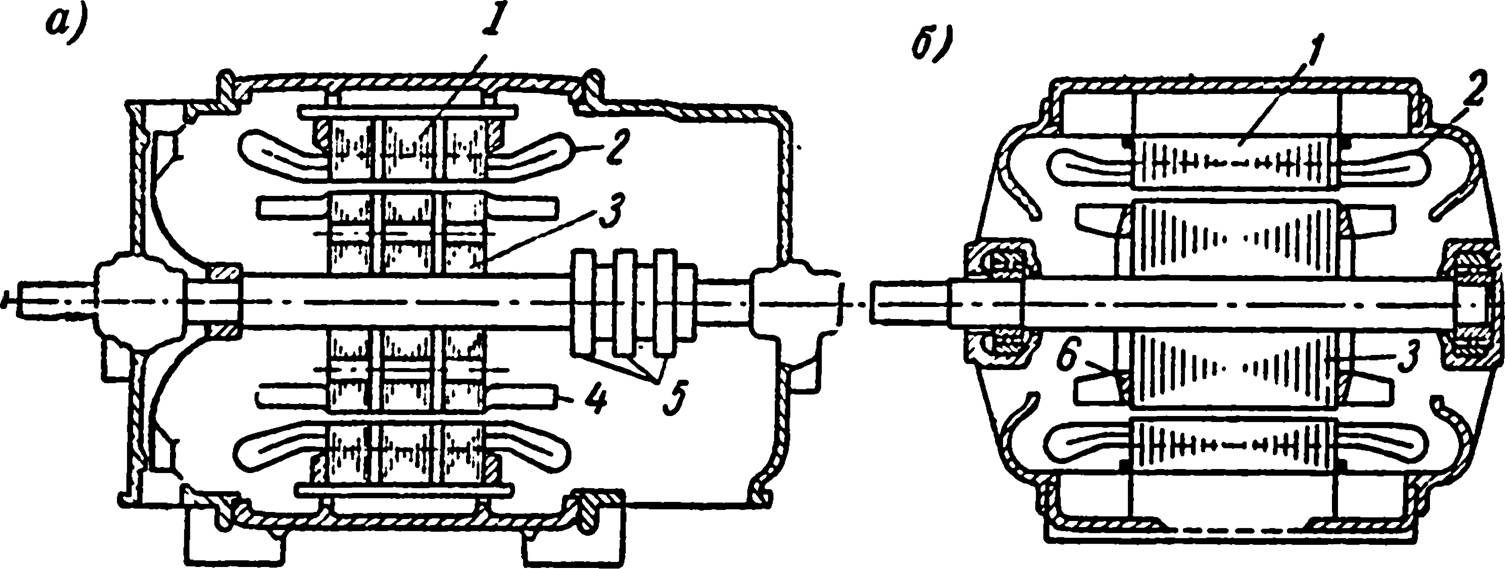
Рис. 1. Конструктивная схема трехфазного асинхронного двигателя: а — с фазной обмоткой ротора, б — с короткозамкнутой обмоткой ротора
Б Синхронная машина. Синхронной машиной называется такая машина переменного тока, скорость вращения ротора которой равна скорости вращения первой гармоники поля статора и определяется 
Рис. 2. Конструктивная схема трехфазного синхронного генератора 
частотой / переменного тока в обмотке статора и количеством пар полюсов машины
(1)
Как правило, магнитное поле в синхронной машине создается обмоткой постоянного тока ротора и обмоткой переменного тока статора. В синхронных машинах малой мощности вместо обмотки постоянного тока на роторе используются постоянные магниты (магни-
тоэлектрические синхронные машины) или же магнитное поле создается только переменным током обмотки статора (реактивные синхронные машины). Синхронные машины широко применяются в качестве генераторов трехфазного переменного тока на электростанциях и используются также в качестве электродвигателей.
На рис. 2 изображена конструктивная схема трехфазной синхронной машины. Здесь 1 — сердечник статора, 2 — трехфазная обмотка статора, 3 — полюсы ротора с обмоткой постоянного тока, 4 — кольца для соединения обмотки ротора с источником постоянного тока, 5 — вентиляторы. 
Рис. 3. Основные типы синхронных машин: а — с явнополюсным ротором, б — с неявнополюсным ротором
По устройству ротора различают два типа синхронной машины: машина с явнополюсным ротором, в которой катушки обмотки постоянного тока размещены на выступающих полюсах (рис. 3,а) и машина с неявнополюсным ротором, в котором распределенная обмотка постоянного тока уложена в пазы ротора (рис. 3,6).
Явнополюсная синхронная машина изготовляется для скорости вращения до 1500 об /мин и используется в качестве генератора или двигателя. Наиболее крупные синхронные машины устанавливаются на гидроэлектростанциях и приводятся во вращение водяными турбинами со скоростью до 300 об/мин.
Неявнополюсная синхронная машина используется в основном как генератор на тепловых электростанциях и приводится во вращение паровой турбиной со скоростью обычно 3000 об/мин (при частоте 50 Гц).
Общие элементы устройства и теории машин переменного тока
Обмотки статора обычно присоединяются к сети переменного тока и создают вращающееся магнитное поле, поэтому устройство этой части асинхронных и синхронных машин получается одинаковым. Сердечник статора изготовляется из листовой электротехнической
стали толщиной 0,5 мм.
На внутренней поверхности статора имеются пазы, в которые уложена обмотка. Форма паза зависит главным образом от мощности машины. 
Рис. 4. Частично открытый паз
При мощности до 100 кет и напряжении до 500 в применяются частично открытие пазы (рис. 4). Изоляция обмотки от сердечника обычно трехслойная: два слоя электрокартона и между ними слой лакоткани или синтетической пленки. Общая толщина изоляции 0,3—0,7 мм. Стороны 1 мягких катушек из круглого провода укладывают через открытие 3 паза по одному или по нескольку проводников, затем края изоляции загибают и, таким образом, закрывают каждый паз. Стороны катушки в пазу удерживаются клином 2 из дерева или слоистого пластика. 

Рис. 5. Частично закрытый паз и изоляция обмотки
1 — прокладка из электрокартона пропитанного, толщиной 0,2 мм,
2 — лента миткалевая впритык, толщиной 0,15 лык, 3 — прокладка из электрокартона, толщиной 0,5 мм, 4— электрокартон пропитанный, толщиной 0,20 мм в 1 слой, 5 — лакоткань черная толщиной 0,3 мм в 1 слой, в — электрокартон пропитанный, толщиной 0,10 мм
впритык, 7 — прокладка из электрокартона толщиной 0,2 мм
Рис. 6. Открытый паз и изоляция обмотки
1 — прокладка из электрокартона (толщиной 0,5 лик), 2 — прокладка из миканита (толщиной 0,2 лык), 3 — микафолий (9 слоев толщиной 0,25 лш), 4 — электрокартон (1 слой толщиной 0.15 лык), 5 — прокладка из электрокартона толщиной 1,7 лык
Частично закрытые пазы (рис. 5) применяются для машин мощностью до 400 кет и напряжением до 500 в. В этом случае каждая катушка состоит из двух полукатушек, намотанных прямоугольным проводом. Полукатушкам придают окончательную форму на специальных шаблонах до укладки в пазы.
В машинах большой мощности и при напряжении выше 500 в катушки изготовляются из прямоугольного провода и изолируются до укладки в прямоугольные пазы (рис. 6).