Разработка прототипа мобильного робота для работы с системой интеллектуального управления
Топорин, А. А. Разработка прототипа мобильного робота для работы с системой интеллектуального управления / А. А. Топорин. — Текст : непосредственный // Молодой ученый. — 2020. — № 30 (320). — С. 42-47. — URL: https://moluch.ru/archive/320/72788/ (дата обращения: 06.04.2024).
Статья посвящена созданию прототипа мобильного робота для работы с интеллектуальной системой управления. В работе кратко приведено описание системы управления, с которой предстоит работать разрабатываемому прототипу. Рассмотрены основные комплектующие, составляющие прототип и их взаимодействие друг с другом. Представлен интерфейс взаимодействия ключевых компонентов прототипа друг с другом при помощи шины I2C и специальных символов. В заключении приведено исследование особенностей функционирования разработанного прототипа мобильного робота с интеллектуальной системой управления.
Ключевые слова: мобильные роботы, интеллектуальная система управления, одноплатный компьютер, микроконтроллер, ультразвуковой датчик.
Введение. Задача о движении колесного робота относится к довольно сложному разделу теоретической механики, который посвящен исследованию движения систем абсолютно твердых тел с неголономными связями. Связи — это ограничения, накладываемые на координаты и скорости точек механической системы. С математической точки зрения связи выражаются дифференциальными уравнениями. В случае, когда эти дифференциальные уравнения не могут быть проинтегрированы и сведены к уравнениям только для координат точек системы, связь называется неголономной [1].
Неголономные механические системы используются тогда, когда накладываются определенные ограничения на скорость, но отсутствуют какие-либо ограничения на позицию. Проще говоря, локальное движение ограничено, однако, глобальное движение является неограниченным.
В данной работе для исследования особенностей разработанной системы управления будем использовать подобный робот.
Краткое описание разработанной интеллектуальной системы управления движением автономного мобильного робота. Структура используемой системы управления [2] представлена на рисунке 1. Она состоит из ряда подсистем, часть которых построена на базе технологий искусственного интеллекта и методов выделения объектов на изображении.
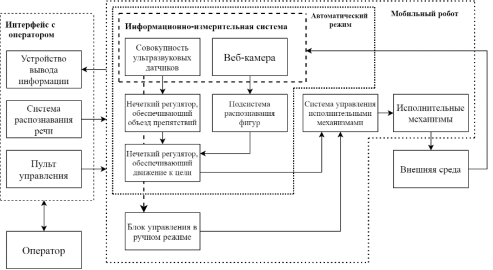
Рис. 1. Структура системы управления мобильным роботом
Система управления позволяет мобильному роботу работать в ручном и в автоматическом режиме. Автономность достигается за счет использования двух нечетких регуляторов, подсистемы распознавания фигур, а также информационно-измерительной подсистемы, включающей в себя три ультразвуковых датчика и веб-камеру, установленных на борту МР. Кроме того, система управления дает возможность реализовать голосовое управление роботом.
Разработка и исследование прототипа мобильного робота. На рисунке 2 изображен неголономный двухколесный мобильный робот с дифференциальным приводом. Скорость робота ограничена направлением вращения колес и при условии отсутствия проскальзывания робот не может двигаться в направлении перпендикулярном вектору движения. Тем не менее, робот может поворачиваться на месте при вращении колес в разных направлениях. Это говорит о том, что глобальное положение робота является неограниченным.
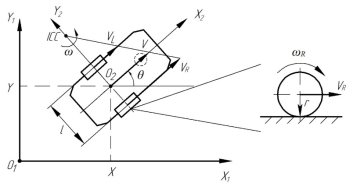
Рис. 2. Схема прототипа мобильного робота
Движение робота происходит в горизонтальной плоскости O 1 X 1 Y 1 . На рисунке X и Y обозначают положение центра оси робота — отрезка, соединяющего ведущие колеса шасси, по отношению к глобальной системе координат, θ указывает направление движения мобильного робота относительно оси X 1 в глобальной системе координат. ICC обозначает мгновенный центр скоростей — точка, вокруг которой будет происходить вращение при поворотах. Переменная r есть радиус колес робота, а l расстояние между центрами колес. Переменные v и ω характеризуют линейную и угловую скорость соответственно, где ω L — скорость вращения левого колеса, ω R — скорость вращения правого колеса. Поворот робота осуществляется путем подачи на двигатели управляющих напряжений разных знаков.
Аппаратная часть разрабатываемой системы состоит из трех основных частей: одноплатного компьютера, микроконтроллера и блока питания. Наглядно структура аппаратной части представлена на рисунке 3.
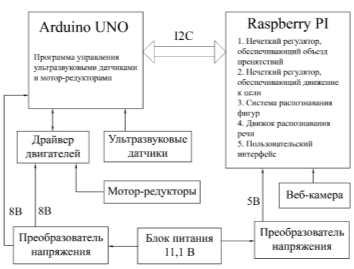
Рис. 3. Аппаратная часть прототипа мобильного робота
Центральной и основной частью системы является одноплатный компьютер Raspberry PI 3 Model B+. Данный компьютер необходим для работы нечетких регуляторов и подсистемы распознавания фигур, обеспечивающих движения мобильного робота к цели в среде с препятствиями. А также для работы подсистемы голосового управления, построенной на базе движка распознавания CMUSphinx [3]. Для работы нечеткого регулятора, одноплатному компьютеру требуются информация с датчиков расстояния, которые подключены к микроконтроллеру Arduino UNO. К микроконтроллеру через драйвер двигателя L298N подключены два мотор-редуктора Gear Motor 48:1, приводящие в движение ведущие колеса мобильного робота.
Еще одним элементом аппаратной части мобильного робота является система питания. Она состоит из трех литий-ионных аккумуляторов 18650, защищенных платой защиты BMS 3S, а также двух понижающих преобразователей напряжения (DC-DC XL4005 и DC-DC T80), питающих основные компоненты робота. Выбор литий-ионных аккумуляторов обусловлен их высокой энергоемкостью, отсутствием «эффекта памяти», меньшим весомом по сравнению с щелочными и кислотными аккумуляторами, а также относительно быстрым временем заряда [4].
В качестве основного источника информации об окружающей среде используется совокупность ультразвуковых дальномеров HC-SR04, расположенных на передней части мобильного робота и, измеряющих расстояние до препятствий слева, спереди и справа. А также веб-камера A4Tech PK-720MJ для получения изображения окружающего пространства вокруг робота.
Собранный прототип представлен на рисунке 4.
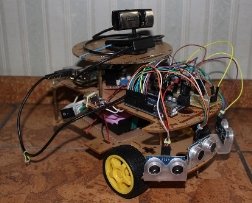
Рис. 4. Прототип мобильного робота
Так как основные элементы системы управления расположены на Raspberry PI, то необходимо осуществить коммуникацию между Raspberry PI и Arduino UNO. Обмен информацией между устройствами осуществляется при помощи шины I2C. Основная проблема заключается в последовательной отправки и получении сообщений. Для решения этой проблемы был разработан набор специальных символов, которые отправляются перед посылкой информации и принимающая сторона не будет совершать никаких действий, до тех пор, пока не поступит соответствующий символ. В зависимости от работающей в данный момент подпрограммы набор символов отличается.
При ручном режиме работы используется набор символов, представленный в таблице 1.
Символы, используемые при ручном режиме работы системы управления
Отправка со стороны Raspberry PI
Как сделать робота с нуля. С чего начать
Я разрабатываю роботов и меня часто спрашивают — «как сделать робота», «где ты находишь информацию, какие ресурсы используешь»?
Если вы не знаете с чего начать и хотите сделать собственного робота — эта статья для вас — в ней я постараюсь объяснить процесс, а также расскажу какие должны быть первые шаги.
Чуть-чуть обо мне
Долгое время я работал на различных предприятиях инженером-конструктором, занимался проектированием механической части устройств. Там я овладел специализированными программами 3Д-проектирования. Также занимался обучением учеников старших классов в ЦМИТе (3Д-печать, САПР, ЧПУ).
Несколько лет назад я перешел в другую профессиональную сферу и стал фронтенд девелопером.
Также с детства я увлекался робототехникой, данная тема меня всегда интересовала. Стартовой точкой идеи создания своего робота у меня стала покупка робот-пылесоса, мне понравилась идея управления устройством через приложение на телефоне.
Что такое робот?
При анализе задачи создания собственного робота, я для себя выделил основные части:
- Механическая часть — это непосредственно тело робота: корпус, двигатели, прочие механизмы.
- Электрическая часть — это то, с помощью чего осуществляется контроль механической части: вращение двигателей, управление другими механизмами. Сюда можно отнести мини-ПК, платы управления двигателями, ультразвуковые датчики, гироскопы и прочее.
- Программная часть — эта часть, включающая в себя всю логику робота — движения, выполнение команд, интерфейс взаимодействия человека — робота. Это может быть приложение, сайт, терминал.
С чего начать
Предлагаю вам ответить на следующие вопросы:
- Что вы хотите? — Вы хотите создать все три части робота с нуля, или взять готового и написать только программную часть? Существует много готовых решений как для механической части, так и для электрической, причем все они довольно доступны в цене и продаются на таких платформах как amazon или aliexpress. Также есть полностью готовые роботы, которые нужно только собрать и написать свой собственный софт. Если вас интересует создание робота полностью с нуля, в данном случае вы можете закупить необходимые детали и полностью спаять всю электронику самостоятельно. Особенные энтузиасты создают все модули сами, начиная с редукторов и заканчивая электроникой. Также различные детали можно изготавливать на 3Д принтерах или на ЧПУ станках.
- Что будет делать ваш робот? — Здесь надо определиться с основным функционалом — будет ли это шагающий робот, робот на колесах, робот — манипулятор и т. п. В процессе никто не мешает нам добавлять новые функции, но без базы это будет сложно. Не обязательно создавать робота с какой-то полезной нагрузкой — быть социально значимым и делать общество лучше. Пусть он просто передвигается или крутит головой, этого вполне достаточно на первом этапе.
- Что вы уже умеете? Насколько вы владеете тем или иным языком программирования. Мой выбор пал на JavaScript (тут понятно почему), но можно и на C++, Python. Перед началом создания робота желательно иметь какие-нибудь навыки программирования.
Как съесть слона?
Ответ очень простой — надо разбить сложную задачу на подзадачи того размера, с которыми вы можете справиться.
Иным словами, я предлагаю начинать с чего‑то простого, например управлением светодиодом или обычным вращением двигателем. Так, постепенно усложняя задачи и двигаясь по спирали, вы будете добавлять необходимый функционал на каждой итерации и в итоге устройство превратится в полноценного робота. Нет ничего страшного в том, если придется откатиться назад и переделать какую‑либо часть, созданную раннее — это обычный подход при проектировании.
Мой личный опыт. Небольшой экскурс.
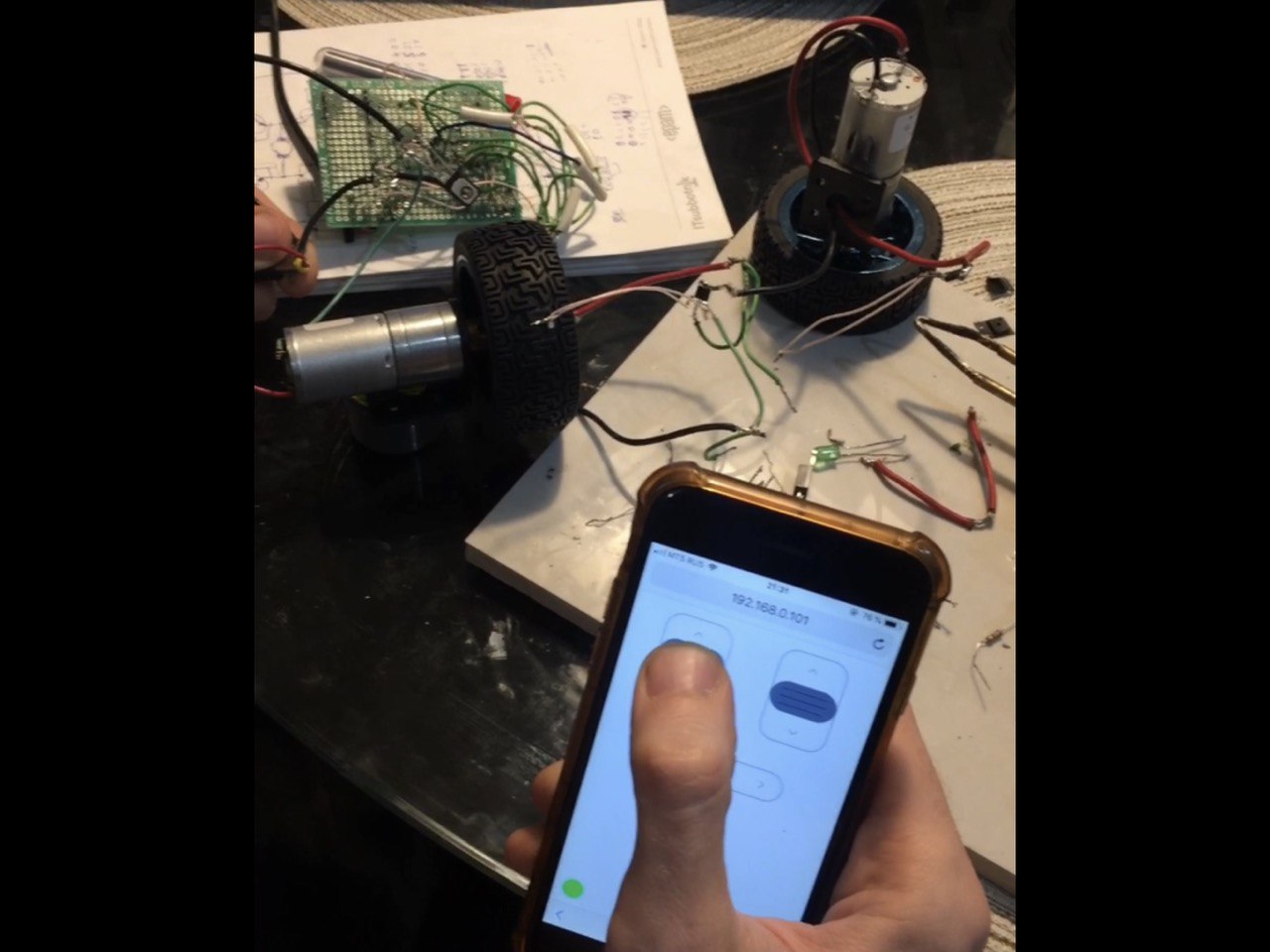
У меня была идея сделать робота, управляемого через интернет. Корпус я решил спроектировать сам и распечатать его на 3Д принтере. Различные электрические устройства приобрел на китайском маркетплейсе — это двигатели, мини-компьютер, драйвера управления двигателями, гироскоп и ультразвуковые датчики, аккумуляторы. На самом первом этапе была цель — заставить двигатель вращаться, светодиод — светиться.
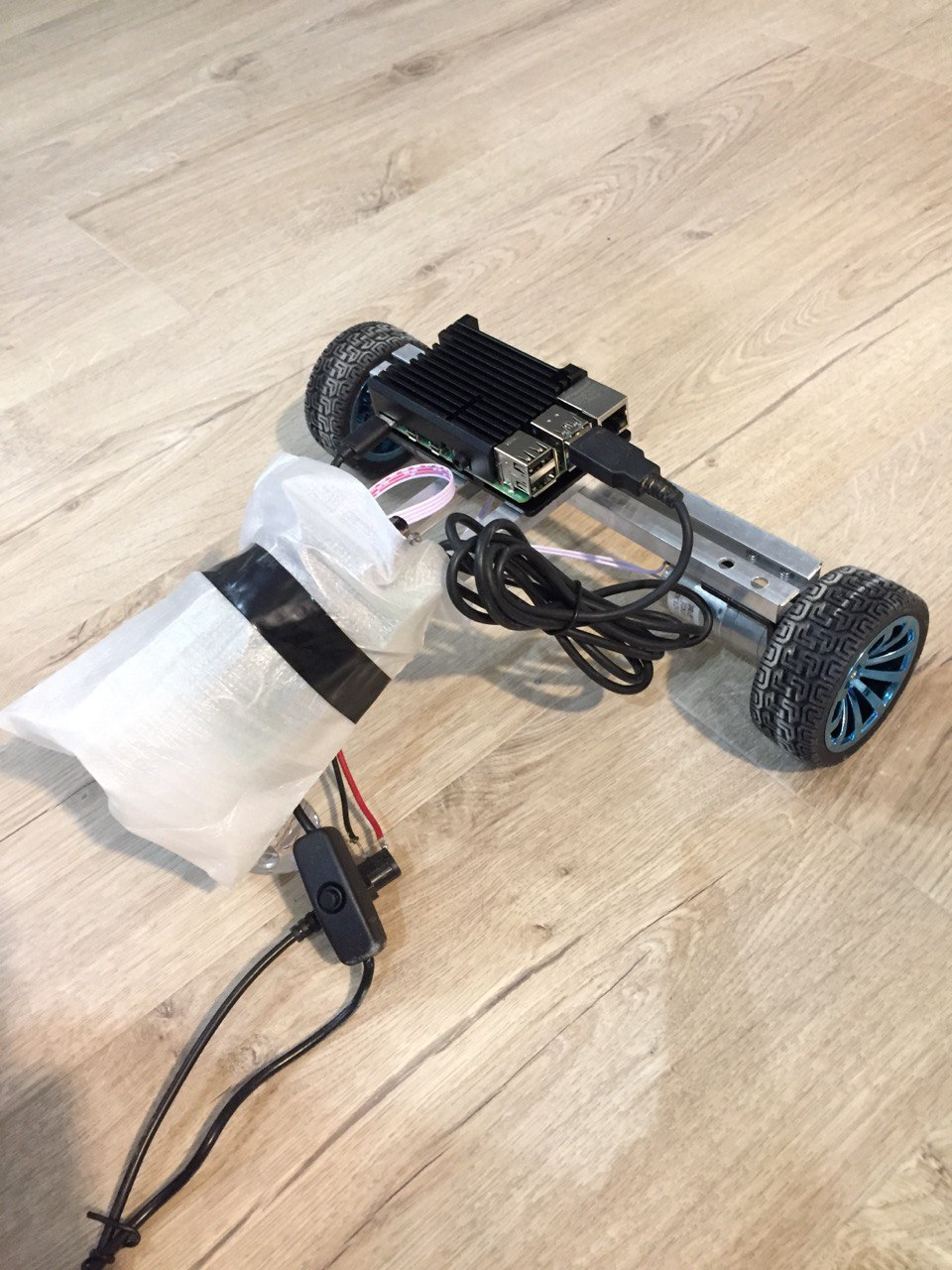
Далее приступил к проектированию корпуса. Перед этим закрепил электронику на алюминиевых профилях, таким образом можно было уже тестировать управление. Среди знакомых оказался владелец 3Д принтера, и он распечатал мне детали.
Параллельно занимался разработкой приложения для управления роботом — веб интерфейса и аппаратной части. Для веб интерфейса использовался React, аппаратная и серверная части были написаны на Node.js.
В итоге был создан робот и протестирован на улице. Весь процесс занял у меня около года — с момента первого мигания светодиода до полноценного устройства.

Далее я приступил к разработке шагающего робота, но это совсем другая история.
Заключение
Если вами интересна данная тема, я напишу более подробно детали реализации. Помните, самое сложное — это начать, проверено на себе.
§ 1.5 Механическая часть и ее классификация


Отзывов: 0 | Написать отзыв
Система управления роботом играет огромную роль. Но не менее важна и механическая конструкция машины. Ведь именно от нее зависят очень многие характеристики: грузоподъемность, производительность, скорость перемещения, ресурс, точность и повторяемость действий, проходимость и т.д.
Существуют различные взгляды на то, как именно классифицировать роботов. Разделять их на группы в части механики можно по самым разным признакам: по назначению, по подвижности, по грузоподъемности, по виду приводов.
Учебный курс «Эвольвектор» по изучению робототехники предназначен для школьников и основан на выполнении реальных практических проектов. Поэтому будем классифицировать только те механические конструкции роботов, модели которых можно относительно легко создать в домашних условиях или в пределах образовательного учреждения (например, школы). В этом случае наиболее подходящим будет разделение на классы по принципу действия роботов и по взаимодействию с окружающими предметами. Схема с вариантом такой классификации представлена на рис. 1.5.1.
 |
| Рис. 1.5.1 Классификация роботов по типу механической части |
Для лучшего понимания отличий между приведенными на схеме типами механических частей роботов ниже приведены короткие комментарии по каждому их виду.
1. Мобильные. Это роботы, принцип действия которых неразрывно связан с перемещением в пространстве, то есть с движением. Перемещаться и двигаться они могут в разных физических средах. Возможно создание робототехнических машин для перемещения по земле или любой твердой поверхности. А могут создаваться и роботы для полетов в воздушном пространстве или плавающие в водной среде.
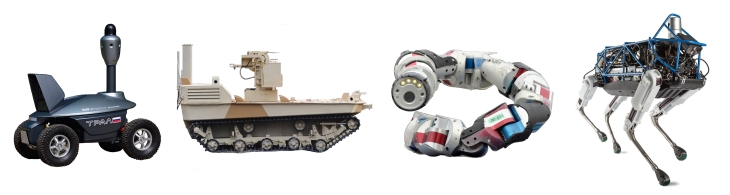
1.1. Наземные. Такой вид роботов является самым популярным. Это логично, так как на суше больше всего работы, которую надо выполнять. И она очень разнообразна. А значит и машины, которые ее исполняют, имеют большое количество разновидностей. Они могут ездить с помощью колес, катиться на гусеницах, шагать как животные или люди, либо даже ползать как змеи (Рис. 1.5.2)
У каждого из перечисленных видов конструкций есть свои достоинства и недостатки. Поэтому разработчиками используются все виды в зависимости от того, какую задачу выполняет робот. Для одной работы может лучше подходить колесная машина, для другой — гусеничная, а где-то наиболее эффективна шагающая.
 |
|||
| А | Б | В | Г |
| Рис. 1.5.2 Разновидности наземных роботов. А — колесные, Б — гусеничные, В — ползающие, Г —шагающие. | |||
1.2. Воздушные. К данной категории относятся все летающие роботы. Летать они могут по-разному: как самолет (рис. 1.5.3 А) или как вертолет (рис. 1.5.3 Б). Роботы вертолетного типа называют коптерами (copter в переводе с англ. — вертолет). Они имеют 4 или более винта, могут взлетать и садиться вертикально. Эта способность делает их применение очень удобным, поскольку не требуется большая площадка для взлета или посадки. Поэтому они наиболее популярны.
 |
 |
| А | Б |
| Рис. 1.5.3. Воздушные роботы. А — самолетного типа, Б -вертолетного. | |
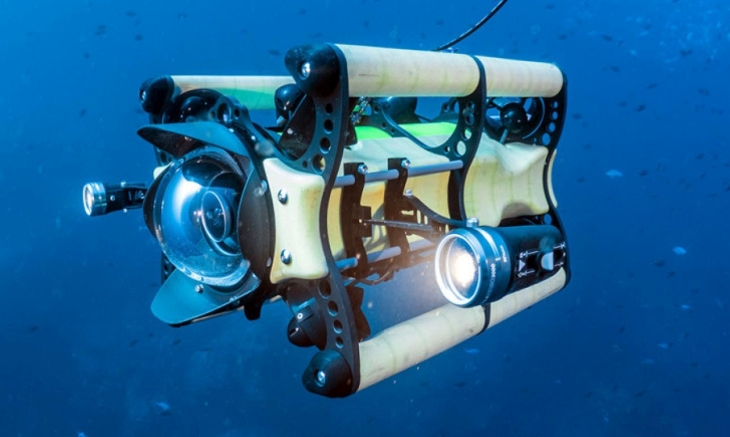
1.3. Водные. Очевидно, что имеются в виду роботы, которые предназначены для плавания по воде или под водой. Первые представляют корабли или лодки с автоматическим управлением (рис. 1.5.4 А), а вторые относятся к классу подводных лодок или батискафов (рис. 1.5.4 Б). Данные машины являются очень специализированными и достаточно редкими по сравнению с наземными и даже с воздушными роботами, т. к. решают узкий круг задач.
 |
 |
| А | Б |
| Рис. 1.5.4 Примеры роботов, работающих в водной стихии. А — надводный патрульный беспилотный катер, Б — подводный дистанционно управляемый аппарат. | |
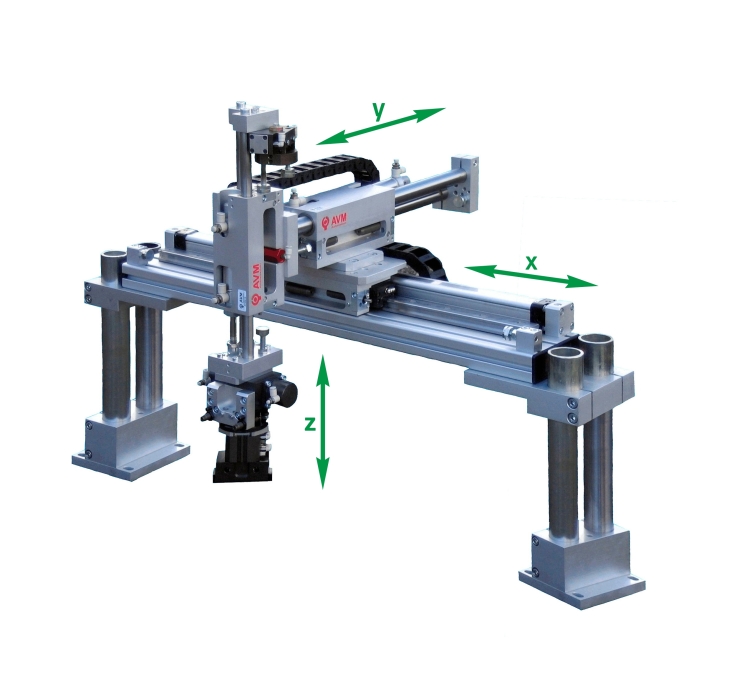
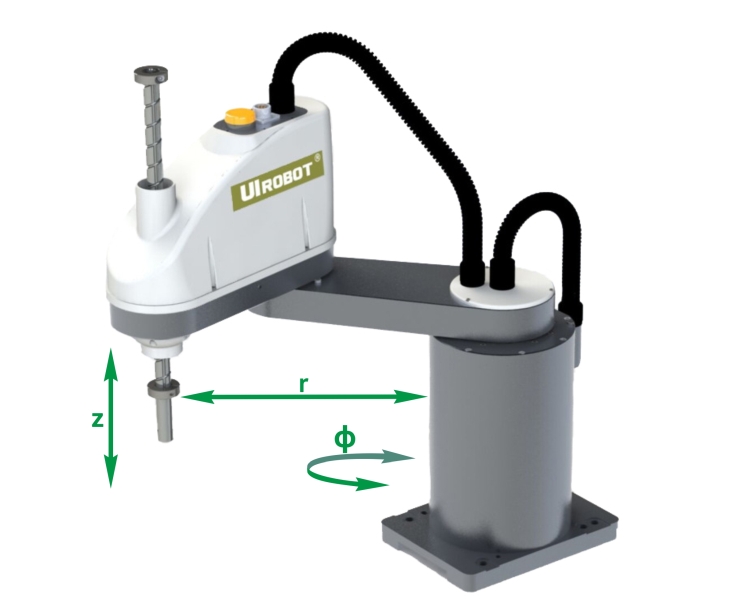
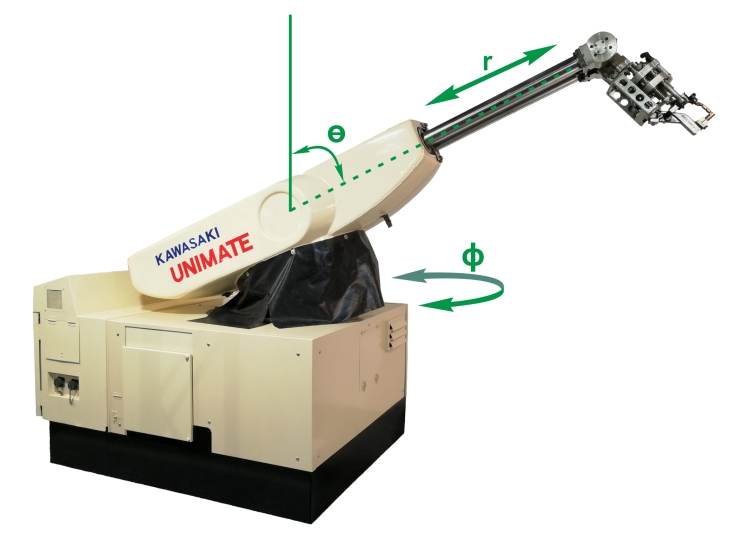
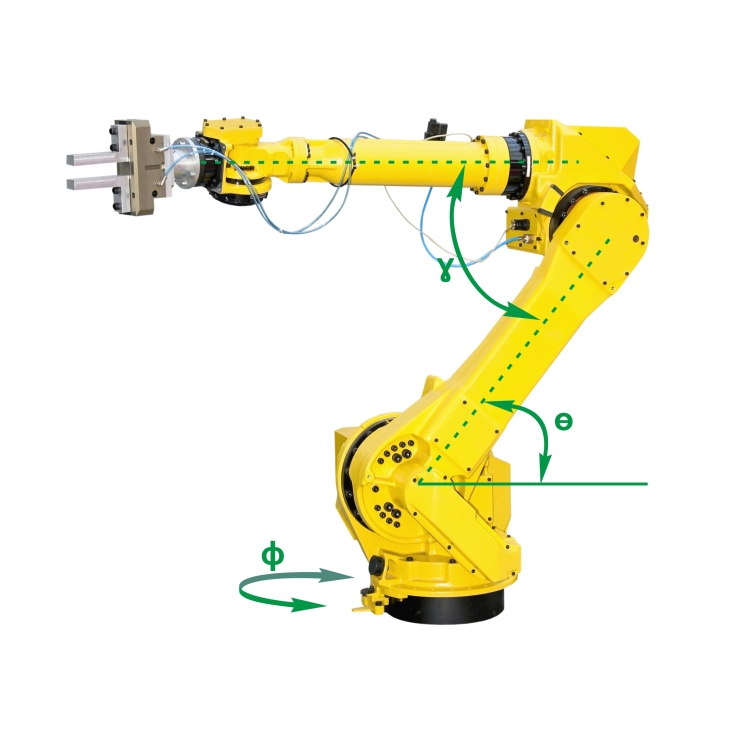
2. Манипуляционные. Можно сказать, что это старейший тип конструкций в робототехнике. По сути, робототехника начиналась именно с манипуляторов. Они впервые стали использоваться в промышленности еще в 60-х годах прошлого века. И они существенно отличаются по принципу действия и конструкции от мобильных роботов. Манипуляционные роботы предназначены для изменения пространственного положения каких-либо предметов, которыми могут быть инструменты, детали или узлы других машин. Они стационарны, то есть установлены на одном месте. Манипуляции с предметами выполняют относительно места своего закрепления. Манипуляционные роботы появились и получили широкое распространение именно на промышленных производствах, поскольку там проще всего создать условия для безопасной и эффективной работы такого робота. В результате за ними закрепилось название «промышленный робот». На рис. 1.5.5 показаны основные виды манипуляционных роботов, которые определяются системами координат, которые используются для управления положением манипулятора.
 |
 |
| А | Б |
 |
 |
| В | Г |
| Рис. 1.5.5 Примеры конструкций роботов-манипуляторов, работающих в разных системах координат. А — в прямоугольной системе координат, Б — в цилиндрической, В — в сферической, Г — в угловой. | |
3. Мобильно-манипуляционные. Эти роботы являются комбинацией манипуляционных и мобильных машин. Проще говоря, это мобильные роботы, на которые установлен один или несколько манипуляторов, способных производить захват предметов и изменять их положение в пространстве. Классическим вариантом такого робота является колесная или гусеничная тележка со смонтированным на ней угловым манипулятором. Его пример уже приводился на рис. 1.4.4. Равно как и показывался пример андроидного робота (рис. 1.1.4, 1.4.7). Человекоподобные машины отличаются тем, что у них всегда есть два манипулятора, конструкция которых очень похожа на строение руки человека.
Итак, рассмотрены классы и виды роботов по типам системы управления и механических частей. По сути, коротко охвачены почти все разновидности робототехнических машин, которые могут использоваться для большинства видов работ в быту и в разных отраслях промышленности.
Если обобщить приведенные на страницах книги иллюстрации, то очевидно, что промышленно и серийно производимые настоящие роботы технологически очень сложны в изготовлении. Создавать их самостоятельно в домашних условиях или в рамках школьных занятий именно в показанном на фотографиях виде невозможно. Это удел состоявшихся инженеров, работающих на серьезных промышленных предприятиях и в больших компаниях.
Однако, цель данного учебного курса заключается в формировании у школьников начальных инженерных навыков по разработке робототехнических конструкций. Для этого вовсе нет нужды в конструировании промышленных образцов. Достаточно научиться создавать модели роботов, которые работают по таким же принципам, что и настоящие промышленные роботы. Как с точки зрения механики, так и в плане системы управления. Тем самым без труда можно освоить методики разработки и создания различных типов роботов, в том числе таких же, как в промышленности. Очень скоро в этом можно будет убедиться.
Написать отзыв
Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке:
Мобильные роботы, их типы, возможности и применение

В этой статье мы рассказываем о мобильных роботах , их истории появления и развития, типах, возможностях и областях применения в логистике и на производстве.
Узнайте больше, прочитав статью.
- Вступление
- Что такое мобильные роботы: определение
- История развития мобильной робототехники с примерами
- Виды мобильных роботов: классификация
- По среде, в которой передвигаются
- По устройству передвижения
- По навигации
- По автономности
- По способу управления
- Сферы применения современных мобильных роботов
- Популярные автономные мобильные роботы
Вступление
Каждое современное предприятие ищет все возможные способы сделать свою работу максимально эффективной. На помощь медицинским учреждениям, сельскохозяйственным компаниям, производственным складам и логистическим организациям приходят автономные мобильные роботы (AMR). Подобные устройства успешно заменяют устаревшее оборудование и позволяют улучшить такие характеристики, как скорость, точность и безопасность.
Что такое мобильные роботы: определение

Мобильными роботами называют автоматические механизмы, способные функционировать без участия человека и самостоятельно перемещаться в пространстве. AMR выполняют самые сложные задания, благодаря интеллектуальной технической базе запрограммированных знаний. В зависимости от системы, заложенной в блоке управления, робот передвигается автономно или подлежит управлению специалистом. Благодаря настройкам программы, механизм самостоятельно определяет траекторию движения или осуществляет движение по заданному маршруту. Мобильные роботы способны увеличить производительность рабочего процесса и оптимизировать трудозатраты, использование такой техники быстро окупается.
История развития мобильной робототехники с примерами
Робототехника начала свое развитие в первой половине ХХ века, и только спустя век был совершен мощный рывок.
Кратко опишем ключевые этапы.
- С 1939 по 1945 — непростое время Второй мировой войны связано с развитием бомб, оснащенных автопилотами.
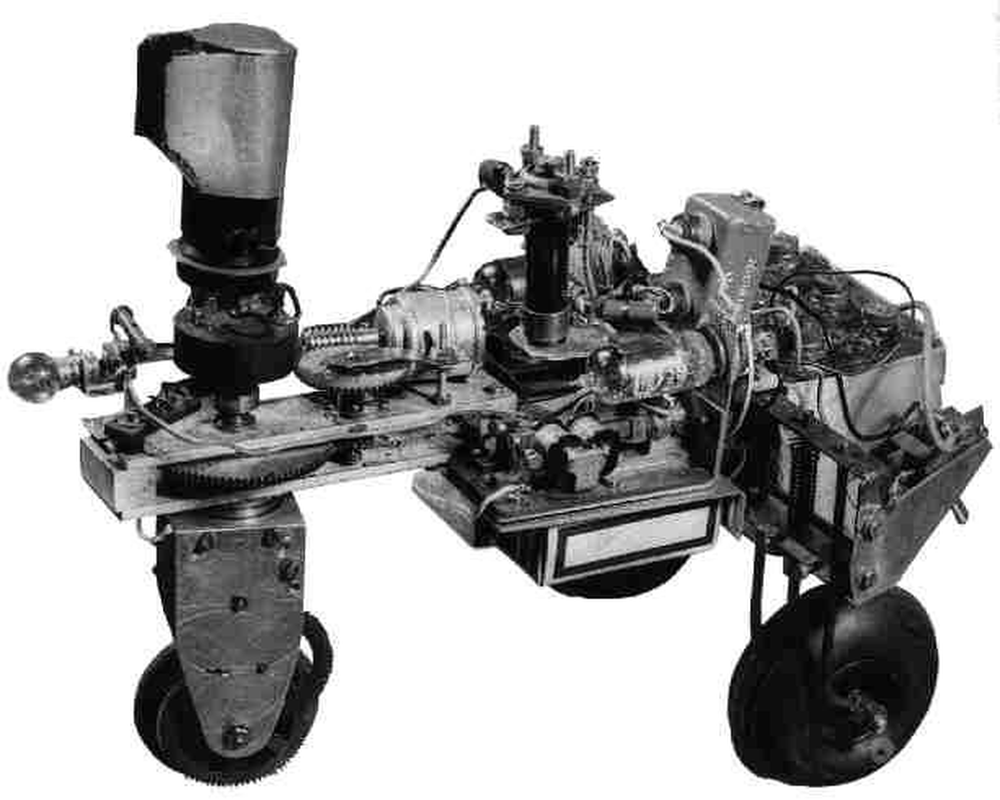
- С 1948 по 1949 — появление первого аналога искусственного интеллекта в форме «умных механизмов» Elmer_Elsie. Они отличались простой конструкцией, но в то же время обладали способностью выполнять сложные действия.
- 1960 — выход в свет робота под названием «Животное Хопкинса».

- С 1966 по 1972 — работа над проектом по созданию робота Shakey the Robot, известного механизма с искусственным интеллектом.

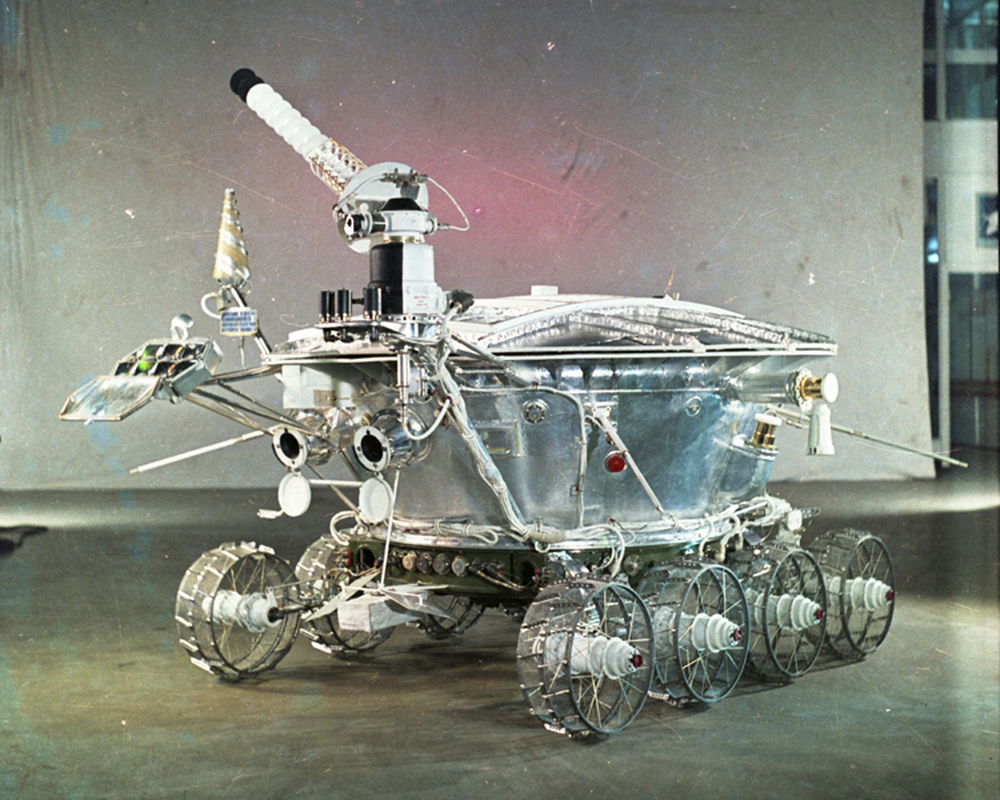
- 1970 — тестирование на Луне первого в истории человечества автономного механизма «Луноход-1», созданного советским инженером Георгием Бабакиным.
- 1980-е годы — появление первых домашних роботов, которые были разработаны для выполнения образовательных и развлекательных функций. В 80-х человечество стало свидетелем появления первых автомобилей, управляемых автопилотами, а также узнало о разработке роботизированных систем. Это десятилетие стало началом эпохи «самосознания» роботов BEAM.
- 1990-е годы — в продаже появились первые медицинские роботы, которые были созданы при поддержке Министерства обороны США. В конце 20-го века на дорогах появились первые автомобили, управляемые автопилотами. В этот же период на Марсе осуществил высадку первый марсоход Pathfinder, а компания Sony разработала «умную собаку-робота» Aibo.
- С 2000 по 2010 — была создана колония мини-ботов, которые могут решать самые сложные задачи и взаимодействовать между собой, подобно насекомым. В это время на рынке появились первые роботы-пылесосы, предназначенные для домашнего использования. Активно идет работа над усовершенствованием военных мобильных механизмов и человекообразных устройств. В медицину и другие сферы активно внедряются перемещающиеся и сортирующие роботы.
- Второе десятилетие 21-го века — по всему миру распространяются многофункциональные роботы-беспилотники, способные самостоятельно принимать решения. В наше время появились первые механизмы, которые могут работать в сложных условиях и обслуживать нефтегазовые установки. В ближайшее время ожидается выход в свет роботов-квадрокоптеров и автоматических уборщиков.
Виды мобильных роботов: классификация
В зависимости от способности взаимодействия с внешней средой, мобильные роботы классифицируют по нескольким направлениям. Рассмотрим основные категории устройств.
По рабочей среде
По среде, в корой работают роботы, их делят на три типа.
- Наземные — сюда относят колесные, гусеничные и шагающие машины. Первую категорию представляют луноходы, марсоходы, транспортные роботы, роботы-пылесосы и автомобили с беспилотным управлением.
- Воздушные — в эту категорию входят геликоптеры и более компактные дроны-беспилотники.
- Морские — бывают подводного и надводного назначения. К первым относят батискафы, ко вторым — радиоуправляемые или автономные катера.
По устройству передвижения
В этой категории выделяют семь типов роботов, отличных по своей кинематике:
- колесные и гусеничные;
- шагающие и прыгающие;
- плавающие;
- летающие;
- лазающие;
- биомиметические;
- специализированные.
Биомиметические роботы разработаны на основе принципов существования живой природы. Своим названием подобные механизмы обязаны латинским словам bios и mimesis, что в переводе означает «жизнь» и «подражание» соответственно.
По способу навигации
Роботы отличаются и по способу ориентации в окружающей среде. Выделяют следующие навигационные схемы:
- Глобальные — такие роботы передвигаются по заданному маршруту с помощью оператора, определяющего координаты устройства в пространстве;
- Локальные — в таких устройствах отсчет координат начинается от точки старта;
- Персональные — ориентация робота в пространстве осуществляется за счет анализа устройством своего положения относительно других объектов.
Навигационные системы делятся на активные и пассивные. В первом случае точка нахождения определяется роботом, во втором — местоположение определяется путем подачи сигнала от внешних датчиков и камер.
По автономности
В этой категории выделяют три типа устройств:
- Роботы первого поколения — осуществляют перемещение по заранее заданной программе и выполняют четкую последовательность действий;
- Роботы второго поколения — механизмы, которым также изначально задаётся программа человеком, но они могут «принимать решения» и на основе информации от датчиков внешней или внутренней среды, которые могут следить, например, за освещенностью, или определять препятствия, или снимать и выдавать значения, определяющие положение робота в пространстве, его скорость;
- Автономные устройства, или роботы 3-го поколения — интеллектуальные роботы, созданные для решения задач по перемещению на сложных участках, таких как труднопроходимая или пересеченная местность.

По способу управления
В зависимости от способа управления роботов классифицируют на следующие типы:
— Автоматические: адаптивное, программное или интеллектуальное управление;
— Дистанционно управляемые: копирующие, командные, интерактивные, супервизорные, диалоговые;
— Ручные: шарнирно-балансирные, экзоскелетные.

Сферы применения современных мобильных роботов
Развитие робототехники существенно упростило жизнь и оптимизировало рабочий процесс. Сегодня многие компании и государственные учреждения повсеместно используют подобные устройства для улучшения итоговых результатов и снижения трудозатрат.
Перечислим основные сферы применения современных мобильных роботов.
- Промышленность. Эта сфера на сегодняшний день практически не обходится без роботов, которые позволяют оперативно решать поставленные бизнес-задачи. В промышленности AMR часто сочетают с программируемыми логическими контроллерами. Роботов используют при транспортировке материалов и на складах.
- Сельское хозяйство. Мобильные устройства позволяют решать ряд задач. Их используют в процессе сбора урожая и даже для оценки степени созревания фермерской продукции.
- Медицина. Применение роботов в здравоохранении позволяет существенно повысить качество медицинского обслуживания. Устройства используют для дезинфекции помещений и поверхностей, доставки препаратов и обеспечения функции мобильного присутствия. Сегодня есть все шансы встретить робота в больнице, который выполняет роль ассистента врача.
- Логистика и транспорт. Использование роботов в этой сфере позволяет компаниям быстро и эффективно доставлять продукцию. Такие устройства часто применяют на складах — они ускоряют рабочий процесс и обеспечивают дополнительную безопасность.
- Торговля и туризм. Мобильных роботов используют для автоматизации рабочих процессов. С их помощью проводится инвентаризация, уборка помещений и оказываются услуги, помогающие клиентам справиться с получением багажа и припарковать машину.
- «Умные города». С помощью AMR создаются безопасные города, оснащенные навигационными и информационными услугами. Роботов в них используют для доставки товаров и с целью выполнения функции патрулирования. Роботы помогают быстрее строить здания и проводить работы в части обследования объектов.

Популярные автономные мобильные роботы
На рынке робототехники представлена продукция ведущих производителей, таких как Mobile Industrial Robots, AGV и Ronavi. В производственной, торговой и других сферах чаще всего используют следующие модели:
- Робот MiR250 — автономное устройство нового поколения, используется для перемещения готовой продукции внутри помещения. Робот может быть укомплектован дополнительными модулями и манипулятором.
- Робот MiR1000 — используется в промышленности и здравоохранении с целью оптимизировать логистические процессы на предприятиях. Робот отличается маневренностью и высокой грузоподъемностью. Оснащен 3D-камерами, а также работает по технологии лазерного сканирования.
- AGV — универсальное решение для автоматизации производства на складах. Автоматизированная логистическая тележка позволяет оптимизировать затраты на персонал. Транспортное средство с электроприводом двигается по заданной территории и самостоятельно контролирует процесс.
Наибольшим спросом пользуются модели Ronavi M500 и Ronavi S50.

Мобильные роботы пользуются особым спросом в производственной, военной, торговой и медицинской областях. Многие эксперты предполагают рост спроса на робототехнику с искусственным интеллектом и среди массовых потребителей. Повсеместное применение роботов-пылесосов подтверждает их предположения. Использование подобных устройств облегчает жизнь, автоматизирует процесс и позволяет в оперативном порядке решать бизнес-задачи любого уровня сложности.
Top 3D Shop — официальный поставщик робототехники ведущих производителей на территории России. Обратитесь за консультацией к нашим специалистам, чтобы выбрать роботов для вашего склада или производства.