Измерения в цифровых системах связи. Анализ ошибок в цифровых системах передачи
Обязательными элементами современных сетей связи являются системы сетевого управления, с помощью которых решаются такие задачи, как реконфигурация сети, непрерывный мониторинг параметров системы связи (например, SIP GSM шлюзов), фиксация аварийных состояний, защитные переключения, хранение и обработка результатов мониторинга и т. д. Все указанные операции выполняются, как правило, автоматически, с помощью встроенных аппаратных и программных средств.
В то же время зачастую при обслуживании сетей связи не удается обойтись без ручных операций с применением портативных измерительных приборов. Классический пример – устранение сложных повреждений металлических кабелей связи, случившихся по причине намокания.
АНАЛИЗ ОШИБОК В ЦИФРОВЫХ СИСТЕМАХ ПЕРЕДАЧИ
Основное преимущество цифровой передачи по сравнению с аналоговой заключается в отсутствии накопления помех вдоль линии. Это достигается за счет восстановления формы передаваемого сигнала на каждом регенерационном участке.
Все факторы, от которых зависит длина участка, можно разделить на внутренние и внешние.
Наиболее важными внутренними считают затухание линии, межсимвольные помехи, нестабильность тактовой частоты системы, вариацию задержки, возрастание уровня шумов вследствие старения системы.
К существенным внешним факторам обычно относят переходные и импульсные помехи, внешние электромагнитные влияния, механические повреждения контактов при вибрации или ударах, ухудшение свойств передающей среды вследствие перепадов температуры.
Все они обычно предопределяют ухудшение самого чувствительного к ошибкам параметра цифровой передачи — соотношения сигнал/шум. Действительно, снижение величины данного соотношения всего на 1 дБ приводит к увеличению обобщенного параметра качества цифровых систем передачи, которым является коэффициент битовых ошибок (Bit Error Rate, BER), по крайней мере на порядок.
Согласно определению, BER представляет собой отношение числа ошибочно принятых битов к общему числу принятых битов. Его величина статистически колеблется около значения среднего коэффициента ошибок за длительный промежуток времени. Разница между непосредственно измеренным коэффициентом ошибок и долговременным средним значением зависит от числа контролируемых бит и тем самым от длительности измерения.
База времени формируется при помощи двух основных методов.
В соответствии с первым из них, на принимающем конце задается фиксированное число наблюдаемых бит и регистрируется соответствующее число бит с ошибками.
Например, если число ошибочно принятых бит оказалось равным 20, а заданное общее число принимаемых бит – 10 6 , то коэффициент ошибок составит 20/10 6 = 20 x 10 -6 = 2 x 10 -5 .
Достоинством такого подхода является точно известное время измерения, а недостатком – невысокая надежность измерения при малом числе ошибок.
Согласно второму методу, время измерений определяется заданным числом ошибок. Измерение длится до тех пор, пока, например, не будет зафиксировано 100 ошибок. Затем на основании соответствующего числа битов данных вычисляется коэффициент ошибок.
Его недостаток заключается в том, что неизвестно время измерений, которое при малых коэффициентах ошибок может оказаться очень большим. Кроме того, вполне возможно, что счетчик бит данных заполнится полностью, и измерения прекратятся. Поэтому такой способ используется редко.
На начальном этапе развития цифровых систем передачи они применялись главным образом для передачи аналогового телефонного сигнала, и потому требования к качеству цифровых систем передачи определялись характеристиками этого сигнала.
Ошибка в цифровом сигнале приводит к быстрому изменению величины сигнала АИМ на входе канального демодулятора, и абонент слышит неприятный щелчок на выходе канала ИКМ. Экспериментально установлено, что заметные щелчки возникают только при ошибках в одном из первых двух наибольших по весу символов кодовой группы, что соответствует максимальному (положительному или отрицательному) изменению сигнала АИМ. Качество связи считается удовлетворительным, если в каждом канале наблюдается не более одного щелчка в минуту. При частоте дискретизации, равной 8 кГц, по каналу передается 8000 x 60 = 480 тыс. кодовых групп в минуту, причем опасными в отношении щелчков являются 960 тыс. старших разрядов. Если считать, что вероятность ошибки для любого разряда кодовой группы одинакова, то при допущении одного щелчка в минуту вероятность ошибки в линейном тракте не должна быть более 1/960 000 = 10 -6 .
С учетом передачи данных, которая более чувствительна к ошибкам передачи, для эталонного международного соединения протяженностью 27 500 км величина BER не должна превышать 10 -7 .
Ошибки можно обнаружить двумя основными методами.
Во-первых, во время приемки и настройки линий связи, поиске неисправностей и ремонте выполняются измерения с перерывом связи, которые реализуются по трем схемам подключения: точка-точка, шлейф и транзит.
Во-вторых, для мониторинга сети и качественной оценки ее состояния, обнаружения и устранения повреждений используются измерения без перерыва связи.
Измерение BER без перерыва связи требует точного знания структуры цифрового сигнала. Таким сигналом в составе цикла, например первичного цифрового сигнала Е-1, является цикловой синхросигнал, занимающий 7 бит нулевого канального интервала (КИ) сигнала E-1.
Цикловой сигнал передается в каждом втором цикле сигнала E-1, причем каждый цикл E-1 содержит 32 КИ и, следовательно, 32 х 8 = 256 бит. Таким образом, относительная доля циклового синхросигнала в сигнале E-1 составляет 7/(256 x 2) -3 . Кроме того, нарушение правил кодирования часто распространяется и на нескольких бит, находящихся после бита с ошибкой. Вследствие этого зависящее от содержания сигнала смещение и погрешность при больших коэффициентах ошибок делают невозможным точный анализ распределения ошибок.
Итак, практическая оценка BER возможна только в режиме измерений с перерывом связи и посылкой эталонных испытательных сигналов. При измерении BER испытательный сигнал должен как можно лучше имитировать реальный, т. е. иметь случайный характер. В качестве такого испытательного сигнала обычно используют псевдослучайную последовательность битов (ПСП) с заданной структурой, близкой к настоящему информационному сигналу. Такие последовательности формируются тактируемыми регистрами сдвига с обратной связью.
Цифровой испытательный сигнал заменяет обычно передаваемый информационный сигнал и оценивается на приемном конце измерителем ошибок.
Таким образом, необходимый в условиях нормальной эксплуатации непрерывный мониторинг ошибок цифровой передачи методом BER без перерыва связи практически невозможен.
В настоящее время для оценки качества цифровых систем передачи в эксплуатационных условиях применяется метод измерения блочных ошибок. Как нетрудно догадаться, главное его достоинство состоит в том, что он основан на использовании самого информационного сигнала и выполняется без прерывания связи.
Все методы измерения блочных ошибок предполагают введение избыточности в информационный сигнал, обработку этого вспомогательного сигнала по определенному алгоритму и передачу результата обработки на принимающую сторону, где принятый сигнал обрабатывается по тому же алгоритму, что и при передаче, а итог сравнивается с результатом обработки, полученным от передающей стороны. При их разнице переданный блок считается ошибочным.
Известно несколько способов обнаружения блочных ошибок. Способы поблочного контроля четности и контрольной суммы не позволяют распознать все типы ошибок, тем самым ограничивая их практическую применимость. Пожалуй, единственным универсальным способом измерения ошибок без перерыва связи является контроль при помощи циклического избыточного кода (Cyclical Redundancy Check, CRC).
Таблица 1. Измерения в цифровых системах связи и соответствующие им процедуры могут применяться для решения целого ряда задач.
| Область применения измерений | Измерительные процедуры |
| Разработка оборудования | Испытания с применением высокоточного контрольно-измерительного оборудования, отработка и проверка программного обеспечения, анализ результатов |
| Производство оборудования | Оперативные измерения параметров оборудования и сравнение их с эталонными, проверка дистанционного управления, контроль комплектующих изделий |
| Инсталляция и линейные испытания оборудования | Измерения с перерывом связи, долговременный анализ, сохранение результатов, использование высокоточных и стандартных приборов |
| Нормальная эксплуатация и техническое обслуживание при поиске и устранении неисправностей | Измерения с перерывом и без перерыва связи, включая непрерывный мониторинг с помощью встроенных систем тестирования и измерения с помощью стандартных приборов, имитация ошибок и аварийных сигналов, контроль качества каналов |
| Ремонт и калибровка — локализация дефектов монтажа и печатных плат, имитация условий эксплуатации | Лабораторное оборудование для проверки на соответствие нормативной документации, испытательные стенды |
Дайте определение основным параметрам цифровых сигналов данных
Таким образом, максимальный шаг квантования (в седьмом сегменте) в 64 раза превышает минимальный шаг квантования, а отношение сигнал/шум квантования (для максимального значения синусоидального сигнала) может быть определено по выражению (5.6) и составит: для второго сегмента
Р с – Р ш кв = 7.78 + 20lg(А/∆) = 7.78 + 20 lg(32∆ 0 /∆ 0 ) = 37.88 дБ;
Для седьмого сегмента
Р с – Р ш кв = 7.78 + 20 lg(2048∆ 0 /64∆ 0 ) = 37.88 дБ.
Зависимость отношения сигнал/шум квантования от уровня входного сигнала при компадировании по закону А = 87.6/13 приведена на рисунке 5.7. Для сигналов в пределах нулевого и первого сегментов осуществляется равномерное квантование с шагом ∆ 0 , поэтому Р с – Р ш кв увеличивается с ростом р с . При переходе ко второму сегменту шаг квантования увеличивается в два раза, вследствие чего Р с – Р ш кв резко уменьшается на 6 дБ, а затем в пределах данного сегмента возрастает с ростом р с , поскольку внутри сегмента осуществляется равномерное квантование. После попадания сигнала в зону ограничения отношение сигнал/шум резко уменьшается за счёт перегрузки кодера.
На рисунке 5.8 представлена упрощённая схема нелинейного кодера взвешивающего типа, реализующего прямое кодирование АИМ сигнала.
Рисунок 5.8 – Нелинейный кодер взвешивающего типа
Кодирование осуществляется за восемь тактовых интервалов, в каждом из которых формируется один из символов кодовой комбинации (рисунок 5.6). В первом такте определяется знак поступившего на вход кодера отсчёта. Если отсчёт положительный, то в знаковом разряде формируется “1” и к схеме переключения и суммирования эталонов СПСЭ подключается формирователь положительных эталонных напряжений ФЭ 1 , в противном случае формируется “0” и к схеме подключается ФЭ 2 . Затем происходит формирование кода номера сегмента методом деления их числа пополам (рисунок 5.9).
Рисунок 5.9 – Алгоритм формирования кода номера сегмента
Во втором такте управляющая логическая схема УЛС и СПСЭ обеспечивают подачу на вход схемы сравнения эталонного сигнала U эт = 128 ∆ 0 , соответствующего нижней границе четвёртого (среднего) сегмента. Если амплитуда отсчёта U АИМ ≥ U эт = 128 ∆ 0 , то принимается решение, что амплитуда отсчёта попадёт в один из четырёх вышележащих сегментов и формируется очередной символ X = 1, который по цепи обратной связи поступает на вход УЛС. В противном случае принимается решение, что амплитуда отсчёта попадает в один из нижележащих сегментов и формируется X = 0.
В третьем такте в зависимости от значения предыдущего символа X уточняется номер сегмента, в который попадает амплитуда кодируемого отсчёта. Если X = 1, то УЛС и СПСЭ подают на вход СС эталонное напряжение U эт = 512 ∆ 0 , соответствующего нижней границе шестого сегмента. При этом, если U АИМ ≥ U эт = 512 ∆ 0 то принимается решение, что отсчёт попадает в один из двух вышележащих сегментов и формируется очередной символ Y = 1. В противном случае, если U АИМ ≤ U эт = 512 ∆ 0 , принимается решение, что отсчёт попадает в два нижележащих сегмента и формируется Y = 0.
Если же X = 0, то УЛС с помощью СПСЭ обеспечивает подачу на вход СС эталонного напряжения U эт = 32 ∆ 0 , соответствующего нижней границе второго сегмента. Если U АИМ ≥ U эт = 32 ∆ 0 , то принимается решение, что отсчёт попадает во второй и третий сегменты и формируется Y = 1. Если U АИМ ≤ U эт = 32 ∆ 0 , то принимается решение, что отсчёт попадает в два нижележащих сегмента и формируется Y = 0.
В четвёртом такте аналогичным образом формируется символ Z и окончательно формируется код номера сегмента. В результате, после четырёх тактов кодирования, сформируется четыре символа восьмиразрядной кодовой комбинации PXYZ (рисунок 5.6) и к СС подключается одно из восьми эталонных напряжений, соответствующих нижней границе сегмента, в котором находится кодируемый отсчёт.
В оставшихся четырёх тактах последовательно формируются символы ABCD кодовой комбинации, значения которых зависят от номера шага квантования внутри сегмента, соответствующего амплитуде кодируемого отсчёта. Поскольку внутри любого сегмента осуществляется равномерное квантование, то процесс кодирования реализуется, как и в линейных кодерах взвешивающего типа, путём последовательного включения эталонных напряжений соответствующих данному сегменту (таблица 5.2).
Практикум на применение нелинейного кодера при компадировании по закону А = 87.6/13 :
Например, если на вход кодера поступил положительный отсчёт с амплитудой U АИМ = 889 ∆ 0 , то после первых четырёх тактов сформируются символы PXYZ = 1110 и к СС подключится эталонное напряжение U эт = 512 ∆ 0 , соответствующее нижней границе шестого сегмента, поскольку кодируемый сигнал находится в этом сегменте. В пятом такте к этому эталонному сигналу добавляется максимальное эталонное напряжение U эт = 256 ∆ 0 , соответствующее символу А в определителе шага квантования К (рисунок 5.6) шестого сегмента (таблица 5.2). Так как U АИМ > U эт = (512 +256) ∆ 0 , то формируется символ А = 1 и это эталонное напряжение остаётся включенным. В шестом такте подключается эталонное напряжение соответствующее символу В в определителе шага квантования U эт = 128 ∆ 0 и так как U АИМ > U эт = (512 +256 + 128) ∆ 0 , то на выходе СС формируется символ В = 1 и это эталонное напряжение остаётся включенным. В седьмом такте подключается эталонное напряжение соответствующее символу С в определителе шага квантования U эт = 64 ∆ 0 и так как U АИМ < U эт = (512 +256 + 128 + 64) ∆ 0 , то на выходе СС формируется символ С = 0. В восьмом такте вместо U эт = 64 ∆ 0 подключается эталонное напряжение соответствующее символу D в определителе шага квантования U эт = 32 ∆ 0 и так как U АИМ < U эт = (512 +256 + 128 + 32) ∆ 0 , то на выходе СС формируется символ D = 0 и это эталонное напряжение отключается и на этом процесс кодирования очередного отсчёта заканчивается. При этом на выходе кодера сформирована кодовая комбинация PXYZABCD = 11101100, соответствующая амплитуде уравновешивающего АИМ сигнала на входе СС U АИМ = 896 ∆ 0 . Разница между входным и уравновешивающим АИМ сигналами на входах СС представляет ошибку квантования δ кв = U АИМ – U АИМ = 7∆ 0 .
5.2 Цифровые иерархии
При выборе иерархии ЦСП должны учитываться следующие требования: стандартизированные скорости передачи цифровых потоков должны выбираться с учётом возможности использования цифровых и аналоговых систем передачи и электрических характеристик существующих и перспективных линий связи; обеспечение возможности как синхронного, так и асинхронного объединения, разделения и транзита цифровых потоков и сигналов в цифровой форме. Кроме того, ЦСП высшего порядка должна удовлетворять требованию независимости скорости передачи в групповом цифровом сигнале от видов передаваемой информации и способа формирования этого сигнала [21].
Указанным требованиям удовлетворяет европейская иерархия ЦСП, которая базируется на первичной ЦСП ИКМ-30 со скоростью передачи группового цифрового сигнала 2048 кбит/с (F т = 2048 кГц) (рисунок 5.10) [1].
Относительное возрастание скорости передачи в каждой последующей ступени иерархии по отношению к предыдущей связано с необходимостью увеличения объёма служебной информации при увеличении числа каналов.
Иерархия ЦСП с ИКМ. Упрощенная структурная схема аппаратуры ВРК с ИКМ приведена на рисунке 5.11, где для простоты показано индивидуальное оборудование одного канала.
Телефонное сообщение u к (t) через дифференциальную систему (ДС) фильтр нижних частот (ФНЧ), который ограничивает спектр сигнала частотой 3.4 кГц, подается на вход модулятора АИМ (М АИМ ). В модуляторе непрерывный сигнал дискретизируется, то есть превращается в последовательность модулированных по амплитуде импульсов, которые имеют частоту F д =8 кГц.
Сигналы с АИМ всех каналов объединяются в групповой АИМ сигнал (смотри рисунок 5.1, в), который поступает на компрессор (Км). После компрессии групповой АИМ сигнал квантуется и кодируется в кодере (Кд). С выхода Кд двухуровневый цифровой сигнал подается на устройство объединения (УО), куда поступают импульсы от передатчика (П) СУВ и от передатчика циклового синхросигнала (ПЦС). Таким образом, в УО формируется групповой цифровой сигнал, структура цикла которого показана на рисунке 5.12.
Параметры двоичного цифрового сигнала плохо согласуются с параметрами реальных линий передачи, не пропускающих низкочастотные составляющие спектра такого сигнала. Поэтому двоичный сигнал подвергается перекодированию в преобразователе кода (ПКп) в так называемый код линии, у которого низкочастотные компоненты ослаблены и характеристики вследствие этого лучше сочетаются с параметрами линии. Работа всех блоков АО синхронизируется сигналами, вырабатываемыми распределителем каналов передачи (РКп).
На приёмной стороне ИКМ сигнал подвергается обратному преобразованию в АИМ квантованный сигнал (декодированию). Для этого непрерывный поток символов должен быть разделён на кодовые группы, каждая из которых соответствует одному отсчёту квантованного сигнала. Декодированный сигнал аналогичен квантованным отсчётам исходного сигнала u кв (iT д ) (смотри рисунок 5.1, а), которые в своём спектре имеют составляющие с частотами Ω н … Ω в передаваемого сообщения u к (t). Поэтому из импульсной последовательности u* кв (iТ д ) принятое сообщение u* к (t) выделяется с помощью ФНЧ.
На стороне приёма сигнал по кабелю поступает на преобразователь кода приёма (ПКпр), где код линии преобразуется в двоичный и поступает в устройство разделения (УР). С выхода УР цикловой синхросигнал и СУВ поступают на свои приёмники, а кодовые группы речевых сигналов в декодере (Дк) преобразуются в групповой АИМ сигнал, который после экспандера (Эк) поступает на временные селекторы (ВС), открывающиеся поочерёдно и пропускающие импульсы АИМ, относящиеся к данному каналу. Демодуляция сигнала в канале осуществляется в ФНЧ.
Управление работой АР осуществляет распределитель каналов приёма (РКпр), синхронизация которого производится тактовой частотой, выделяемой из группового цифрового сигнала узкополосным фильтром, расположенным на выходе ПКпр, и цикловой синхронизацией.
Рассмотрим методы синхронизации. Для согласованной работы АО, АР и регенераторов необходимо обеспечить равенство скоростей обработки сигналов, правильное распределение АИМ сигналов и СУВ. Это осуществляется путём синхронизации регенераторов, генераторного оборудования АР по тактовой частоте и по циклам принимаемого цифрового сигнала [3].
При N гр канальных интервалах и m разрядах в информационных кодовых группах тактовая частота группового цифрового сигнала
F т = F д ∙ m ∙ N гр . (5.7)
Так, для системы ИКМ-30, рассчитанной на N гр = 32 канальных интервала при восьмиразрядной кодовой группе, F т = 8∙8∙32 = 2048 кГц. Групповой цифровой сигнал u ИКМ (t) представляет собой случайную последовательность двоичных импульсов (рисунок 5.1, в). Эту последовательность можно представить в виде суммы периодической и случайной последовательностей. Периодическая последовательность импульсов имеет дискретный спектр и при τ и , равной Т и Т/2, дискретные составляющие будут иметь частоты F=0; F т и так далее (смотри рисунок 5.13, где эти составляющие отмечены точками). Случайная биполярная последовательность определяет непрерывный спектр (рисунок 5.13) исходной двоичной последовательности.
Рисунок 5.13 – Энергетический спектр случайной последовательности двоичных импульсов (а, б) и сигнала с ЧПИ (в) (составляющие дискретного спектра отмечены точками)
Из рисунка 5.13 следует, что максимальную энергию тактовой частоты имеет случайная двоичная последовательность с τ и = T/2. Колебания с тактовой частотой F т выделяются из такой последовательности узкополосным фильтром и используются в регенераторе для синхронизации работы решающего устройства.
Система цикловой синхронизации определяет начало цикла передачи и обеспечивает согласованное с АО распределение декодированных на приемном конце отсчетных значений аналоговых сигналов по своим каналам. Неточность работы цикловой синхронизации приводит к увеличению вероятности ошибки в информационных каналах. Для увеличения помехоустойчивости в качестве циклового синхросигнала (рисунок 5.12) используется группа символов постоянной структуры с частотой следования 4 кГц, то есть ЦС передаются через цикл передачи.
Рассмотрим объединение ЦСП на базе асинхронного ввода цифровых сигналов. Необходимость объединения цифровых потоков возникает при формировании группового цифрового сигнала из цифровых потоков систем более низкого порядка, из различных сигналов, передаваемых в цифровом виде, а также при вводе в групповой цифровой сигнал дискретных сигналов от различных источников информации (рисунок 5.14). Цифровые потоки формируются в ЦСП, задающие генераторы которых могут быть синхронизированы или несинхронизированы с задающим генератором оборудования объединения. В соответствии с этим производится синхронное или асинхронное объединение цифровых потоков.
Для временного объединения асинхронных цифровых потоков необходимо предварительно согласовать их скорости, то есть “привязать” их к одной опорной частоте [3]. На приёме суммарный сигнал распределяется по соответствующим выходам. Приходящие на вход системы передачи биты из четырёх информационных потоков записываются в ячейки памяти запоминающего устройства (ЗУ), а затем считываются с них и направляются в линию. Если содержимое ячеек памяти считалось быстрее, сформировался “пустой” временной интервал для вставки синхроимпульсов. Строгая периодичность синхросигнала – одно из важнейших свойств для его распознавания.
Если же генератор окажется нестабильным, то появится смещение во времени “пустых” интервалов и нарушится строгая периодичность их повторения. Может произойти сбой в работе системы синхронизации и всей аппаратуры в целом. Во избежание этого применяют процедуру выравнивания скоростей или, как часто называют, согласования скоростей.
Специальный контроллер следит за взаимным положением импульсов записи и считывания и, если импульсы считывания начали следовать быстрее (расстояние между соседними парами этих импульсов уменьшается), то контролер сигнализирует, что “пустой” интервал появился раньше времени. Другое устройство вводит в пустой интервал ложный импульс, не несущий никакой информации. В данном случае мы имеем дело с положительным согласованием скоростей.
Описанная выше процедура согласования скоростей называется стаффинг (от английского “staffing” — вставка). На приёмную станцию подаётся команда, что произошло согласование скоростей для ликвидации ложного импульса. Для надёжности команду согласования скоростей многократно дублируют, например, посылают её три раза.
Если же генератор вырабатывает импульсы считывания реже и в цифровом потоке уже должен появиться “пустой” интервал, а тактовые импульсы ещё не считали из ЗУ предшествующий ему информационный импульс, то придётся исключить из цифрового потока лишний бит и предоставить временной интервал для передачи очередного синхроимпульса. Такое согласование получило название отрицательного.
Таким образом, на приёмную станцию необходимо сообщить, какое согласование произошло: положительное или отрицательное. Для этой цели вводят команду “Вид согласования”, посылая по другому служебному каналу 1 при положительном согласовании и 0 при отрицательном. Её также повторяют три раза. Таким образом, информация об изъятии или добавлении импульса передается в специально выделенных импульсных позициях, и на основе этой информации, на приемной стороне при разделении цифровых потоков происходит восстановление их скоростей (рисунок 5.14). Объединение потоков с выравниванием скоростей получило название плезиохронного, то есть почти синхронного, а существующая иерархия скоростей передачи цифровых потоков, а, значит, и систем передачи типа ИКМ – плезиохронной цифровой иерархией (по-английски PDH- Plesiohronous Digital Hierarhy).
При асинхронном способе объединения в блоках цифрового сопряжения БЦС пер (рисунок 5.14) скорости цифровых потоков объединяемых систем приводятся в соответствие с их соотношением с тактовой частотой объединенного потока и устанавливаются необходимые временные положения сигналов объединяемых потоков (КЦП – коллектор цифрового потока, РЦП – распределитель цифрового потока). Для синхронизации тракта передачи и приема по групповому цифровому потоку он разбивается на циклы, в начале которых вводится сигнал синхронизации (рисунок 5.14, б и в). При поканальном объединении цифровых потоков сужаются и распределяются во времени интервалы, отводимые для кодовых групп (рисунок 5.14, в).
Указанные иерархии, известные под общим названием PDH, или ПЦИ, сведены в таблицу 5.3.
Таблица 5.3 – Сравнение иерархий
Уровень цифровой
иерархии
Скорости передач, соответствующие
различным схемам цифровой иерархии
AC: 1544 Кбит/с
ЯС: 1544 Кбит/с
EC: 2048 Кбит/с
Курс лекций «Основы цифровой обработки сигналов»
Часто ко мне обращаются люди с вопросами по задачам из области цифровой обработки сигналов (ЦОС). Я подробно рассказываю нюансы, подсказываю нужные источники информации. Но всем слушателям, как показало время, не хватает практических задач и примеров в процессе познания этой области. В связи с этим я решил написать краткий интерактивный курс по цифровой обработке сигналов и выложить его в открытый доступ.
Большая часть обучающего материала для наглядного и интерактивного представления реализована с использованием Jupyter Notebook. Предполагается, что читатель имеет базовые знания из области высшей математики, а также немного владеет языком программирования Python.

Список лекций
Этот курс содержит материалы в виде законченных лекций по разным тематикам из области цифровой обработки сигналов. Материалы представлены с использованием библиотек на языке Python (пакеты numpy, scipy, matplotlib, и т.д.). Основная информация для этого курса взята из моих лекций, которые я, будучи аспирантом, читал студентам Московского Энергетического Института (НИУ МЭИ). Частично информация из этих лекций была использована на обучающих семинарах в Центре Современной Электроники, где я выступал в качестве лектора. Кроме того, в этот материал входит перевод различных научных статей, компиляция информации из достоверных источников и литературы по тематике цифровой обработки сигналов, а также официальная документация по прикладным пакетам и встроенным функциям библиотек scipy и numpy языка Python.
Для пользователей MATLAB (GNU Octave) освоение материала с точки зрения программного кода не составит труда, поскольку основные функции и их атрибуты во многом идентичны и схожи с методами из Python-библиотек.
Все материалы сгруппированы по основным тематикам цифровой обработки сигналов:
- Сигналы: аналоговые, дискретные, цифровые. Z-преобразование,
- Преобразование Фурье: амплитудный и фазовый сигнала, ДПФ и БПФ,
- Свертка и корреляция. Линейная и циклическая свертка. Быстрая свёртка,
- Случайные процессы. Белый шум. Функция плотности вероятностей,
- Детерминированные сигналы. Модуляция: АМ, ЧМ, ФМ, ЛЧМ. Манипуляция,
- Фильтрация сигналов: БИХ, КИХ фильтры,
- Оконные функции в задачах фильтрации. Детектирование слабых сигналов,
- Ресемплинг: децимация и интерполяция. CIC-фильтры, фильтры скользящего среднего,
- Непараметрические методы спектрального анализа,
- Усреднение по частоте и по времени. Полифазный БПФ.
Список лекций — достаточный но, разумеется, неполный для вводного знакомства с областью ЦОС. При наличии свободного времени я планирую поддерживать и развивать этот проект.
Где найти?
Все материалы — абсолютно бесплатны и доступны в виде открытого репозитория на моем гитхабе как opensource проект. Материалы представлены в двух форматах — в виде тетрадок Jupyter Notebook для интерактивной работы, изучения и редактирования, и в виде скомпилированных из этих тетрадок HTML-файлов (после скачивания с гитхаба имеют вполне пригодный формат для чтения и для печати).
Ниже приводится очень краткое описание разделов курса с небольшими пояснениями, терминами и определениями. Основная информация доступна в исходных лекциях, здесь представлен лишь краткий обзор!
Сигналы. Z-преобразование
Вводный раздел, в котором содержится основная информация по типам сигналов. Вводится понятие дискретной последовательности, дельта-функции и функции Хевисайда (единичный скачок).
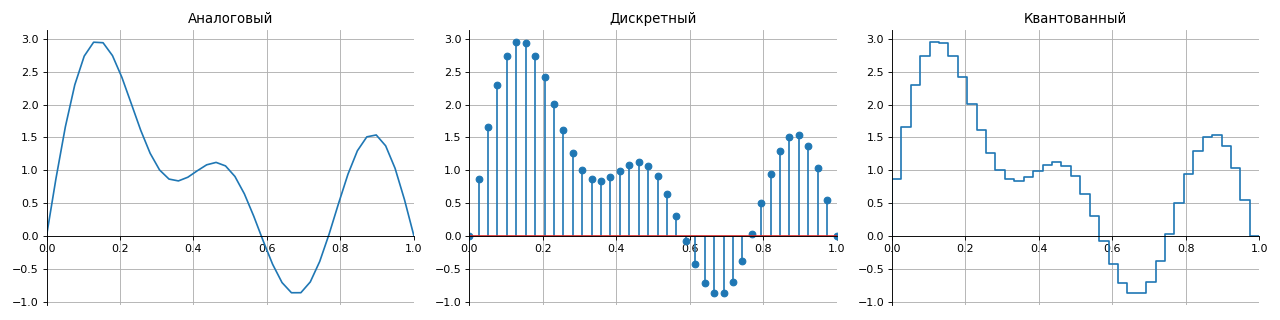
- аналоговые — описываются непрерывными во времени функциями,
- дискретные — прерываются во времени с шагом заданным дискретизации,
- квантованные — имеют набор конечных уровней (как правило, по амплитуде),
- цифровые — комбинация свойств дискретных и квантованных сигналов.
Для правильного восстановления аналогового сигнала из цифрового без искажений и потерь используется теорема отсчетов, известная как Теорема Котельникова (Найквиста-Шеннона).
Любой непрерывный сигнал с ограниченным спектром может быть восстановлен однозначно и без потерь по своим дискретным отсчетам, взятым с частотой строго больше удвоенной верхней частоты спектра непрерывного сигнала.
Такая трактовка справедлива при условии, что непрерывная функция времени занимает полосу частот от 0 до значения верхней частоты. Если шаг квантования и дискретизации выбраны неправильно, преобразование сигнала из аналоговой формы в дискретную будет происходить с искажениями.
Также в этом разделе описывается Z-преобразование и его свойства, показывается представление дискретных последовательностей в Z-форме.
Пример конечной дискретной последовательности:
Пример этой же последовательности в Z-форме:
X(z) = 2 + z -1 — 2z -2 + 2z -4 + 3z -5 + 1z -6
Преобразование Фурье. Свойства. ДПФ и БПФ
В этом разделе описывается понятие временной и частотной области сигнала. Вводится определение дискретного преобразования Фурье (ДПФ). Рассмотрены прямое и обратное ДПФ, их основные свойства. Показан переход от ДПФ к алгоритму быстрого преобразования Фурье (БПФ) по основанию 2 (алгоритмы децимации по частоте и по времени). Отражена эффективность БПФ в сравнении с ДПФ.
В частности, в этом разделе описывается Python пакет scipy.ffpack для вычисления различных преобразований Фурье (синусное, косинусное, прямое, обратное, многомерное, вещественное).
Преобразование Фурье позволяет представить любую функцию в виде набора гармонических сигналов! Преобразование Фурье лежит в основе методов свертки и проектировании цифровых корреляторов, активно применяется при спектральном анализе, используется при работе с длинными числами.
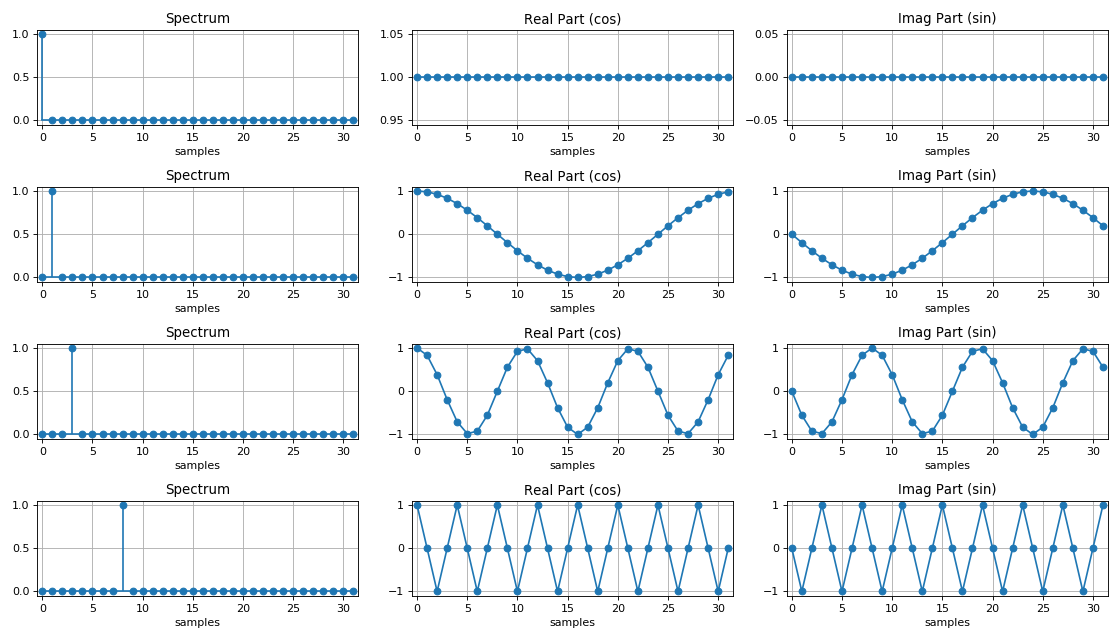
Особенности спектров дискретных сигналов:
1. Спектральная плотность дискретного сигнала – периодическая функция с периодом, равным частоте дискретизации.
2. Если дискретная последовательность вещественная, то модуль спектральной плотности такой последовательности есть четная функция, а аргумент – нечетная функция частоты.
Спектр гармонического сигнала:
Сравнение эффективности ДПФ и БПФ
Эффективность алгоритма БПФ и количество выполняемых операций линейно зависит от длины последовательности N:
| N | ДПФ | БПФ | Отношение числа комплексных сложений | Отношение числа комплексных умножений | ||
|---|---|---|---|---|---|---|
| Число операций умножения | Число операций сложения | Число операций умножения | Число операций сложения | |||
| 2 | 4 | 2 | 1 | 2 | 4 | 1 |
| 4 | 16 | 12 | 4 | 8 | 4 | 1.5 |
| 8 | 64 | 56 | 12 | 24 | 5.3 | 2.3 |
| 16 | 256 | 240 | 32 | 64 | 8 | 3.75 |
| 32 | 1024 | 992 | 80 | 160 | 12.8 | 6.2 |
| 64 | 4096 | 4032 | 192 | 384 | 21.3 | 10.5 |
| 128 | 16384 | 16256 | 448 | 896 | 36.6 | 18.1 |
| . | . | . | . | . | . | . |
| 4096 | 16777216 | 16773120 | 24576 | 49152 | 683 | 341 |
| 8192 | 67108864 | 67100672 | 53248 | 106496 | 1260 | 630 |
Как видно, чем больше длина преобразования, тем больше экономия вычислительных ресурсов (по скорости обработки или количеству аппаратных блоков)!
Любой сигнал произвольной формы можно представить в виде набора гармонических сигналов разных частот. Иными словами, сигнал сложной формы во временной области имеет набор комплексных отсчетов в частотной области, которые называются *гармоники*. Эти отсчеты выражают амплитуду и фазу гармонического воздействия на определенной частоте. Чем больше набор гармоник в частотной области, тем точнее представляется сигнал сложной формы.

Свертка и корреляция
В этом разделе вводится понятие корреляции и свертки для дискретных случайных и детерминированных последовательностей. Показана связь автокорреляционной и взаимнокорреляционной функций со сверткой. Описываются свойства свертки, в частности, рассмотрены методы линейной и циклической свертки дискретного сигнала с подробным разбором на примере дискретной последовательности. Кроме того, показан метод вычисления «быстрой» свертки с помощью алгоритмов БПФ.
В реальных задачах часто ставится вопрос о степени похожести одного процесса на другой или же о независимости одного процесса от другого. Иными словами, требуется определить взаимосвязь между сигналами, то есть найти корреляцию. Методы корреляции используются в широком диапазоне задач: поиск сигналов, компьютерное зрение и обработка изображений, в задачах радиолокации для определения характеристик целей и определения расстояния до объекта. Кроме того, с помощью корреляции производится поиск слабых сигналов в шумах.
Свертка описывает взаимодействие сигналов между собой. Если один из сигналов — импульсная характеристика фильтра, то свертка входной последовательности с импульсной характеристикой есть ни что иное, как реакция цепи на входное воздействие. Иными словами, результирующий сигнал отражает прохождение сигнала через фильтр.
Автокорреляционная функция (АКФ) находит применение в кодировании информации. Выбор кодирующей последовательности по параметрам длины, частоты и формы во многом обусловлен корреляционными свойствами этой последовательности. Наилучшая кодовая последовательность обладает наименьшим значением вероятности ложного обнаружения или срабатывания (для детектирования сигналов, для пороговых устройств) или ложной синхронизации (для передачи и приема кодовых последовательностей).
В этом разделе представлена таблица сравнения эффективности быстрой свертки и свертки, вычисляемой по прямой формуле (по числу вещественных умножений).
Как видно, для длин БПФ до 64, быстрая свёртка проигрывает у прямого метода. Однако, при увеличении длины БПФ результаты меняются в обратную сторону — быстрая свертка начинает выигрывать у прямого метода. Очевидно, чем больше длина БПФ, тем лучше выигрыш частотного метода.
| N | Свертка | Быстрая свертка | Отношение |
|---|---|---|---|
| 8 | 64 | 448 | 0.14 |
| 16 | 256 | 1088 | 0.24 |
| 32 | 1024 | 2560 | 0.4 |
| 64 | 4096 | 5888 | 0.7 |
| 128 | 16K | 13312 | 1.23 |
| . | . | .. | . |
| 2048 | 4M | 311296 | 13.5 |
Случайные сигналы и шум
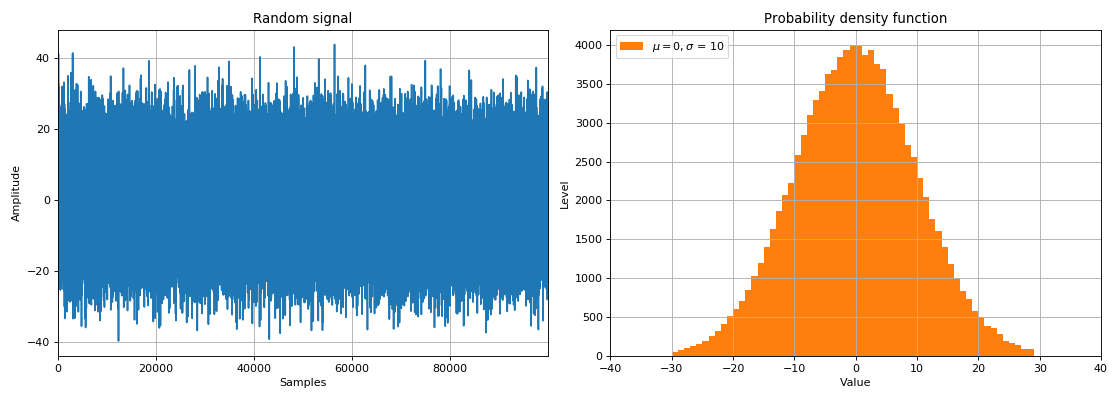
В этом разделе вводится понятие случайных сигналов, плотности распределения вероятностей, закона распределения случайной величины. Рассматриваются математические моменты — среднее (математическое ожидание) и дисперсия (или корень этой величины — среднеквадратическое отклонение). Также в этом разделе рассматривается нормальное распределение и связанное с ним понятие белого шума, как основного источника шумов (помех) при обработке сигналов.
Случайным сигналом называют функцию времени, значения которой заранее неизвестны и могут быть предсказаны лишь с некоторой вероятностью. К основным характеристикам случайных сигналов относятся:
- закон распределения (относительное время пребывания значения сигнала в определенном интервале),
- спектральное распределение мощности сигнала.
В задачах ЦОС случайные сигналы делятся на два класса:
- шумы — беспорядочные колебания, состоящие из набора разных частот и амплитуд,
- сигналы, несущие информацию, для обработки которых требуется прибегать к вероятностным методам.
С помощью случайных величин можно моделировать воздействие реальной среды на прохождение сигнала от источника к приёмнику данных. При прохождении сигнала через какое-то шумящее звено, к сигналу добавляется так называемый белый шум. Как правило, спектральная плотность такого шума равномерно (одинаково) распределена на всех частотах, а значения шума во временной области распределены нормально (Гауссовский закон распределения). Поскольку белый шум физически добавляется к амплитудам сигнала в выбранные отсчеты времени, он называется аддитивный белый гауссовский шум (AWGN — Additive white Gaussian noise).
Сигналы, модуляция и манипуляция
В этом разделе показаны основные способы изменения одного или нескольких параметров гармонического сигнала. Вводятся понятия амплитудной, частотной и фазовой модуляции. В частности, выделяется линейная частотная модуляция, применяемая в задачах радиолокации. Показаны основные характеристики сигналов, спектры модулированных сигналов в зависимости от параметров модуляции.

Для удобства на языке Python создан набор функций, осуществляющих перечисленные виды модуляции. Пример реализации ЛЧМ-сигнала:
def signal_chirp(amp=1.0, freq=0.0, beta=0.25, period=100, **kwargs): """ Create Chirp signal Parameters ---------- amp : float Signal magnitude beta : float Modulation bandwidth: beta < N for complex, beta < 0.5N for real freq : float or int Linear frequency of signal period : integer Number of points for signal (same as period) kwargs : bool Complex signal if is_complex = True Modulated by half-sine wave if is_modsine = True """ is_complex = kwargs.get('is_complex', False) is_modsine = kwargs.get('is_modsine', False) t = np.linspace(0, 1, period) tt = np.pi * (freq * t + beta * t ** 2) if is_complex is True: res = amp * (np.cos(tt) + 1j * np.sin(tt)) else: res = amp * np.cos(tt) if is_modsine is True: return res * np.sin(np.pi * t) return res 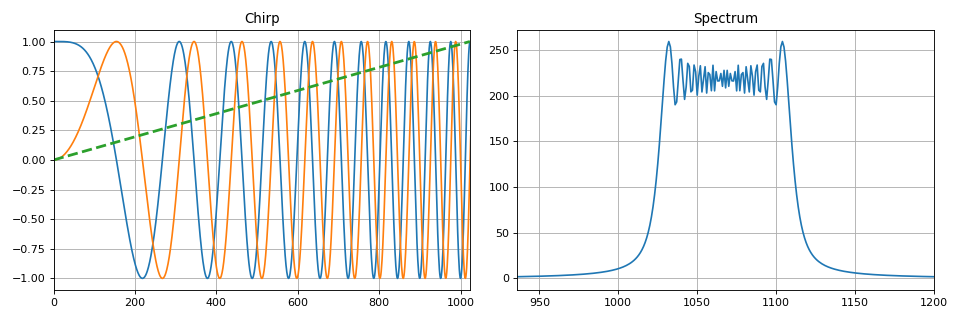
Также в этом разделе из теории передачи дискретных сообщений описаны виды цифровой модуляции — манипуляции. Как и в случае с аналоговыми сигналами, цифровые гармонические последовательности могут быть манипулированы по амплитуде, фазе и частоте (либо по нескольким параметрам сразу).

Цифровые фильтры — БИХ и КИХ
Достаточно большой раздел, посвященный вопросам цифровой фильтрации дискретных последовательностей. В задачах цифровой обработки сигналов данные проходят через цепи, которые называются фильтрами. Цифровые фильтры, как и аналоговые, обладают различными характеристиками — частотные: АЧХ, ФЧХ, временная: импульсная характеристика, а также передаточная характеристика фильтра. Цифровые фильтры используются в основном для улучшения качества сигнала — для выделения сигнала из последовательности данных, либо для ухудшения нежелательных сигналов — для подавления определенных сигналов в приходящих последовательностях отсчетов.

В разделе перечислены основные преимущества и недостатки цифровых фильтров (в сравнении с аналоговыми). Вводится понятие импульсной и передаточной характеристик фильтра. Рассматривается два класса фильтров — с бесконечной импульсной характеристикой (БИХ) и конечной импульсной характеристикой (КИХ). Показан способ проектирования фильтров по канонической и прямой форме. Для КИХ фильтров рассматривается вопрос о способе перехода к рекурсивной форме.
Для КИХ фильтров показан процесс проектирования фильтра от стадии разработки технического задания (с указанием основных параметров), до программной и аппаратной реализации — поиска коэффициентов фильтра (с учетом формы представления числа, разрядности данных и т.д.). Вводятся определения симметричных КИХ фильтров, линейной ФЧХ и её связи с понятием групповой задержки.

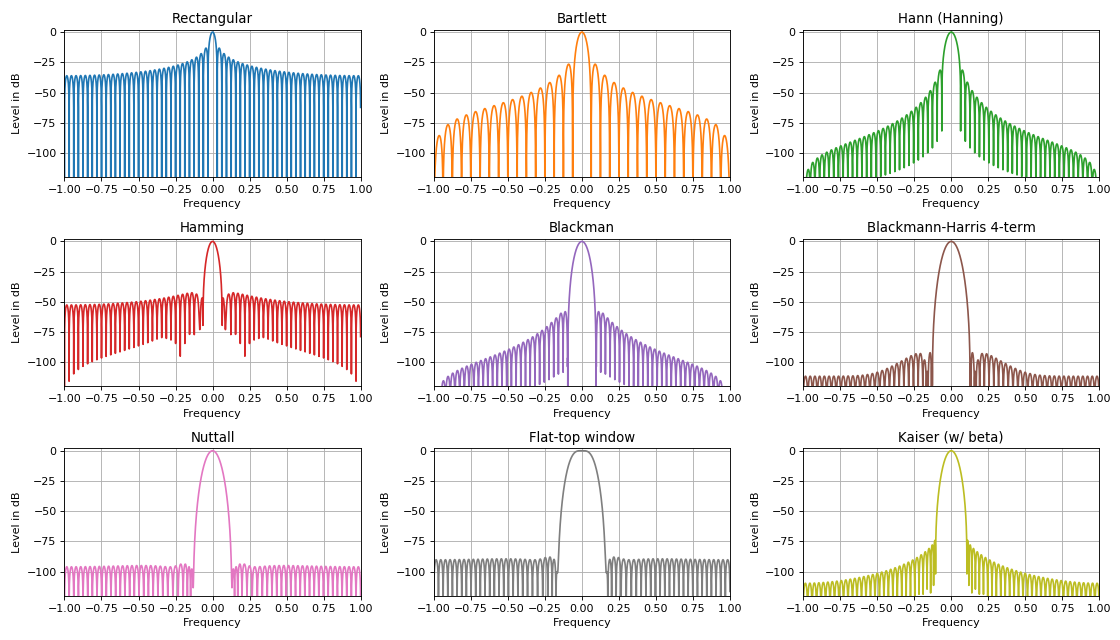
Оконные функции в задачах фильтрации
В задачах цифровой обработки сигналов используются оконные функции различной формы, которые при наложении на сигнал во временной области, позволяют качественно улучшить его спектральные характеристики. Большое количество всевозможных окон обусловлено в первую очередь одной из главных особенностей любого оконного наложения. Эта особенность выражается во взаимосвязи уровня боковых лепестков и ширины центрального лепестка. Правило:
Чем сильнее подавление боковых лепестков спектра, тем шире главный лепесток спектра и наоборот.

Одно из применений оконных функций: обнаружение слабых сигналов на фоне более сильных путём подавления уровня боковых лепестков. Основные оконные функции в задачах ЦОС — **треугольное, синусоидальное, окно Ланцоша, Ханна, Хэмминга, Блэкмана, Харриса, Блэкмана-Харриса, окно с плоской вершиной, окно Наталла, Гаусса, Кайзера** и множество других. Большая часть из них выражена через конечный ряд путём суммирования гармонических сигналов с определенными весовыми коэффициентами. Такие сигналы отлично реализуются на практике на любых аппаратных устройствах (программируемые логические схемы или сигнальные процессоры).
Ресемплинг. Децимация и интерполяция
В этом разделе рассматриваются вопросы многоскоростной обработки сигналов — изменения частоты дискретизации. Многоскоростная обработка сигналов (multirate processing) предполагает, что в процессе линейного преобразования цифровых сигналов возможно изменение частоты дискретизации в сторону уменьшения или увеличения, либо в дробное число раз. Это приводит к более эффективной обработке сигналов, так как открывается возможность использования минимально допустимых частот дискретизации и, как следствие, значительного уменьшения требуемой вычислительной производительности проектируемой цифровой системы.
Децимация (прореживание) – понижение частоты дискретизации. Интерполяция – повышение частоты дискретизации.
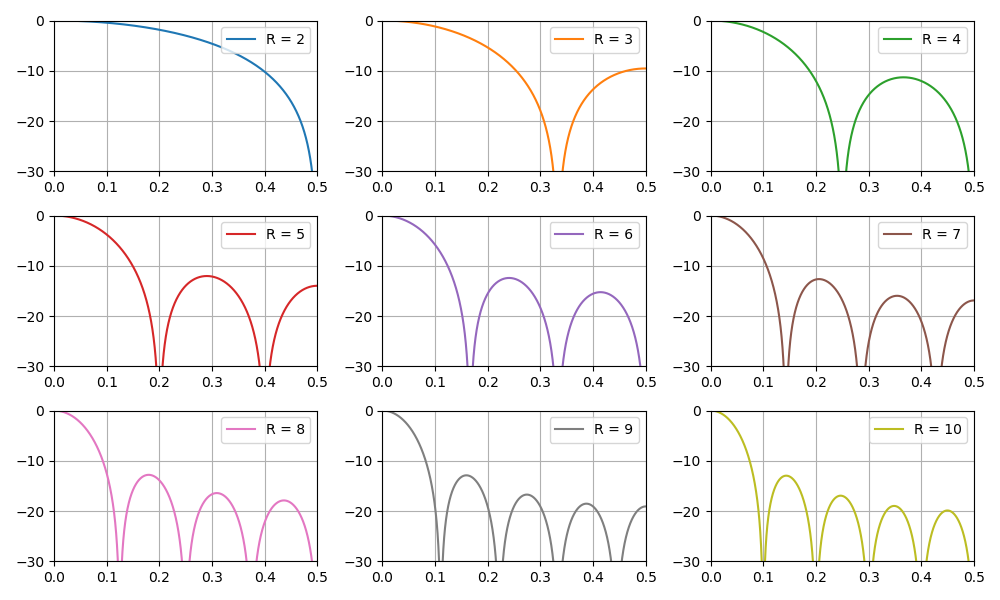
Также в разделе рассматривается класс однородных КИХ фильтров, которые называются интегрально-гребенчатыми фильтрами (CIC, Cascaded integrator–comb). Показана реализация, основные свойства и особенности CIC фильтров. В силу линейности математических операций, происходящих в CIC фильтре возможно каскадное соединение нескольких фильтров подряд, что дает пропорциональное уменьшение уровня боковых лепестков, но также увеличивает «завал» главного лепестка амплитудно-частотной характеристики.
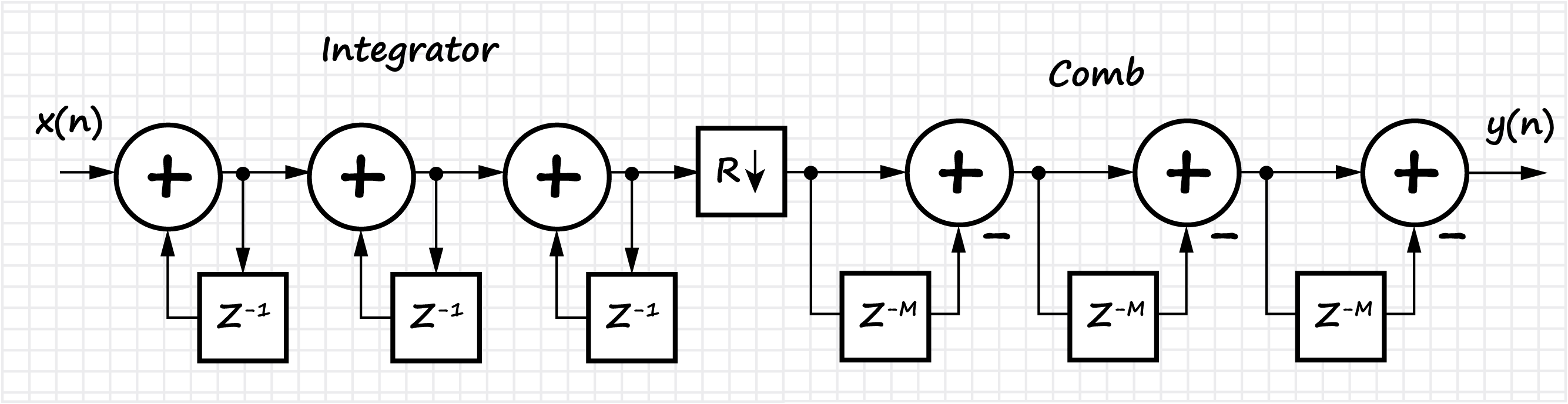
График АЧХ фильтра в зависимости от коэффициента децимации:
Также в этом разделе обсуждается вопрос увеличения разрядности данных на выходе CIC фильтра в зависимости от его параметров. Это особенно важно в задачах программной реализации, в частности на ПЛИС.
Для практической реализации CIC фильтров на Python разработан отдельный класс CicFilter, реализующий методы децимации и интерполяции. Также показаны примеры изменения частоты дискретизации с помощью встроенных методов из scipy пакета Python.
Python CicFilter Class for Digital Signal Processing
class CicFilter: """ Cascaded Integrator-Comb (CIC) filter is an optimized class of finite impulse response (FIR) filter. CIC filter combines an interpolator or decimator, so it has some parameters: R - decimation or interpolation ratio, N - number of stages in filter (or filter order) M - number of samples per stage (1 or 2)* * for this realisation of CIC filter just leave M = 1. CIC filter is used in multi-rate processing. In hardware applications CIC filter doesn't need multipliers, just only adders / subtractors and delay lines. Equation for 1st order CIC filter: y[n] = x[n] - x[n-RM] + y[n-1]. Parameters ---------- x : np.array input signal """ def __init__(self, x): self.x = x def decimator(self, r, n): """ CIC decimator: Integrator + Decimator + Comb Parameters ---------- r : int decimation rate n : int filter order """ # integrator y = self.x[:] for i in range(n): y = np.cumsum(y) # decimator y = y[::r] # comb stage return np.diff(y, n=n, prepend=np.zeros(n)) def interpolator(self, r, n, mode=False): """ CIC inteprolator: Comb + Decimator + Integrator Parameters ---------- r : int interpolation rate n : int filter order mode : bool False - zero padding, True - value padding. """ # comb stage y = np.diff(self.x, n=n, prepend=np.zeros(n), append=np.zeros(n)) # interpolation if mode: y = np.repeat(y, r) else: y = np.array([i if j == 0 else 0 for i in y for j in range(r)]) # integrator for i in range(n): y = np.cumsum(y) if mode: return y[1:1 - n * r] else: return y[r - 1:-n * r + r - 1] 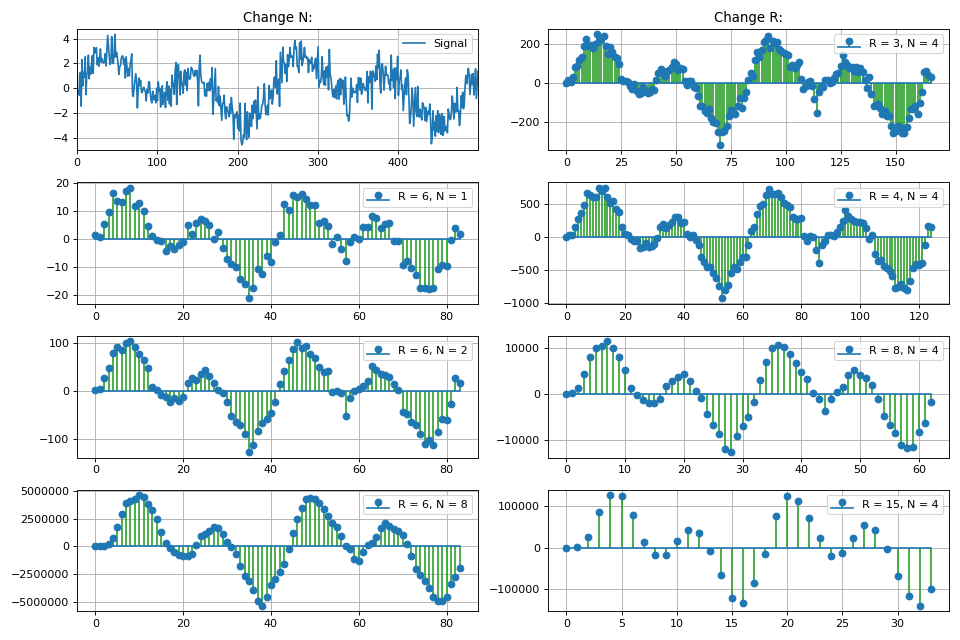
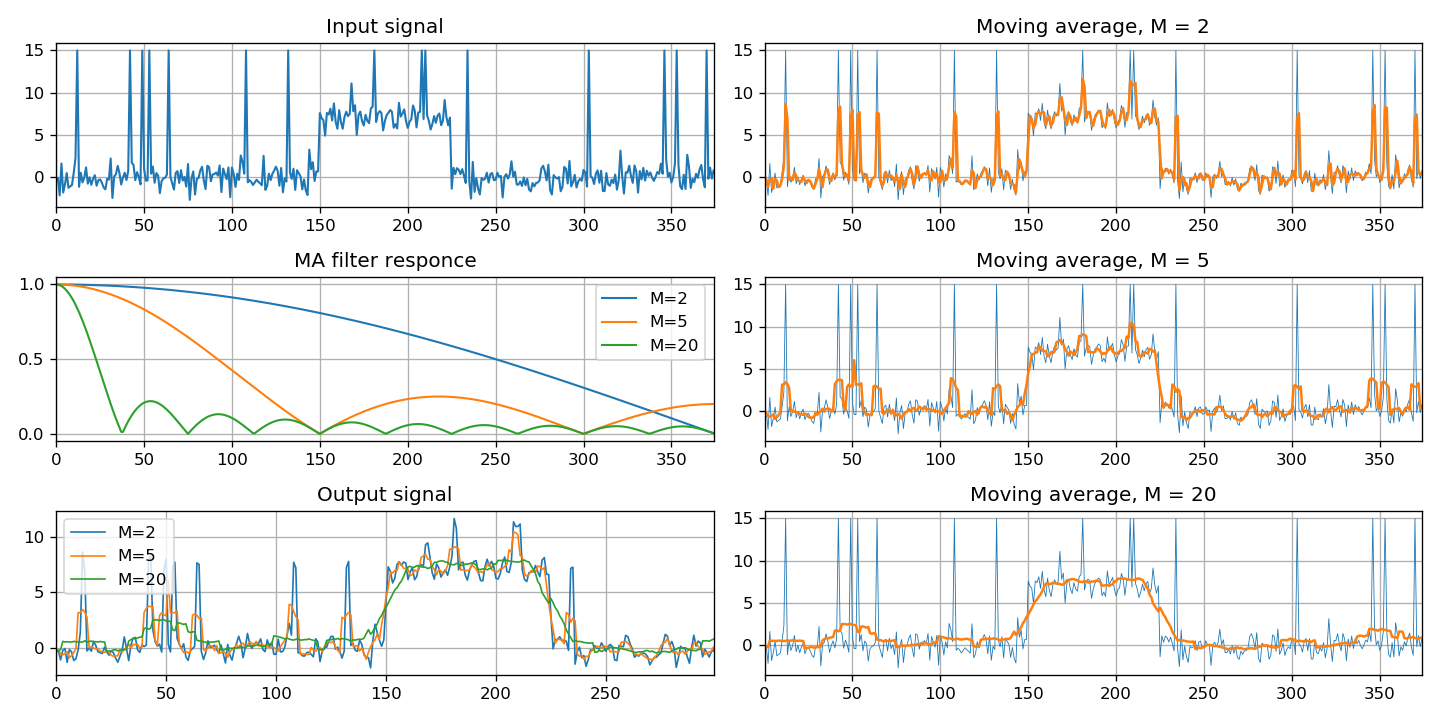
Наконец, в этом разделе приведен особый класс фильтров — скользящего среднего. Показано три способа реализации: через свертку сигналов, с помощью КИХ-фильтра и БИХ-фильтра.
Заключение
Надеюсь, этот курс лекций в совокупности с моими предыдущими статьями по цифровой обработке сигналов на ПЛИС принесет практическую пользу и поможет читателю лучше понять основы цифровой обработки сигналов. Этот проект будет улучшаться и дополняться новым полезным и не менее интересным материалом. Следите за развитием!
Дополнительно к этому материалу я поддерживаю и развиваю свой проект по основным модулям ЦОС (на языке Python). Он содержит пакет генерации различных сигналов, класс CIC фильтров для задач децимации и интерполяции, алгоритм расчета коэффициентов корректирующего КИХ-фильтра, фильтр скользящего среднего, алгоритм вычисления сверх-длинного БПФ через методы двумерного преобразования (последнее очень пригодилось в работе при аппаратной реализации на ПЛИС).
UPD: 20.04.2020
- Непараметрические методы спектрального анализа (Владимир Фадеев)
- Усреднение по частоте и по времени. Полифазный БПФ.
Спасибо за внимание!
- digital-signal-processing
- dsp
- python3
- python
- numpy
- scipy
- matplotlib
- алгоритмы
- цифровая обработка сигналов
- цифровая фильтрация
- быстрое преобразование фурье
- математика
Цифровой сигнал
Сигналы представляют собой дискретные электрические или световые импульсы. При таком способе вся емкость коммуникационного канала используется для передачи одного сигнала. Цифровой сигнал использует всю полосу пропускания кабеля. Полоса пропускания — это разница между максимальной и минимальной частотой, которая может быть передана по кабелю. Каждое устройство в таких сетях посылает данные в обоих направлениях, а некоторые могут одновременно принимать и передавать. Узкополосные системы (baseband) передают данные в виде цифрового сигнала одной частоты.
Дискретный цифровой сигнал сложнее передавать на большие расстояния, чем аналоговый сигнал, поэтому его предварительно модулируют на стороне передатчика, и демодулируют на стороне приёмника информации. Использование в цифровых системах алгоритмов проверки и восстановления цифровой информации позволяет существенно увеличить надёжность передачи информации.
Замечание. Следует иметь в виду, что реальный цифровой сигнал по своей физической природе является аналоговым. Из-за шумов и изменения параметров линий передачи он имеет флуктуации по амплитуде, фазе/частоте (джиттер), поляризации. Но этот аналоговый сигнал (импульсный и дискретный) наделяется свойствами числа. В результате для его обработки становится возможным использование численных методов (компьютерная обработка).
Важным свойством цифрового сигнала, определившего его доминирование в современных системах связи, является его способность к полной регенерации вплоть до некоторого порогового отношения сигнал/шум, в то время как аналоговый сигнал удаётся лишь усилить вместе с наложившимися на него шумами. Здесь же кроется и недостаток цифрового сигнала: если цифровой сигнал утопает в шумах, восстановить его невозможно (эффект крутой скалы (англ.)), в то время как человек (не машина) может усвоить информацию из сильно зашумлённого сигнала на аналоговом радиоприёмнике, хотя и с трудом. Если сравнивать сотовую связь аналогового формата (AMPS, NMT) с цифровой связью (GSM, CDMA), то при помехах на цифровой линии из разговора выпадают порой целые слова, а на аналоговой можно вести разговор, хотя и с помехами. Выход из данной ситуации - почаще регенерировать цифровой сигнал, вставляя регенераторы в разрыв линии связи, или уменьшать длину линии связи (например, уменьшать расстояние от сотового телефона до базовой станции (БС), что достигается более частым расположением БС на местности).
Ссылки
- ↑ГОСТ 17657—79 «Передача данных. Термины и определения»
См. также
- Аналоговый сигнал
- Сигнал (техника)
- Квантованный сигнал