Микропроцессорная система
Микропроцессорная система (МПС) представляет собой функционально законченное изделие, состоящее из одного или нескольких устройств, главным образом микропроцессорных: микропроцессора и/или микроконтроллера.
Микропроцессорное устройство (МПУ) представляет собой функционально и конструктивно законченное изделие, состоящее из нескольких микросхем, в состав которых входит микропроцессор; оно предназначено для выполнения определённого набора функций: получение, обработка, передача, преобразование информации и управление.
Состав
Генератор тактовых импульсов задаёт временной интервал, который является единицей измерения (квантом) продолжительности выполнения команды. Чем выше частота, тем при прочих равных условиях более быстродействующей является МПС. МП, ОЗУ и ПЗУ — это неотъемлемые части системы. Интерфейсы ввода и вывода — устройства сопряжения МПС с блоками ввода и вывода информации. Для измерительных приборов характерны устройства ввода в виде кнопочного пульта и измерительных преобразователей (АЦП, датчиков, блоки ввода цифровой информации). Устройства вывода обычно представляют цифровые табло, графический экран (дисплей), внешние устройства сопряжения с измерительной системой. Все блоки МПС связаны между собой шинами передачи цифровой информации. В МПС используют магистральный принцип связи, при котором блоки обмениваются информацией по единой шине данных. Количество линий в шине данных обычно соответствует разрядности МПС (количеству бит в слове данных). Шина адреса применяется для указания направления передачи данных — по ней передаётся адрес ячейки памяти или блока ввода-вывода, которые получают или передают информацию в данный момент. Шина управления служит для передачи сигналов, синхронизирующих всю работу МПС.
Применение в измерительных приборах
Главная особенность микропроцессора — возможность программирования логики работы. Поэтому МПС используются для управления процессом измерения (реализацией алгоритма измерения), обработки опытных данных, хранения и вывода результатов измерения и пр. Рассмотрим основные преимущества микропроцессорных средств измерения.
- Многофункциональность. Замена измерительного комплекса (совокупности различных измерительных приборов) одним, многофункциональным. Такая замена в приборах с «жесткой» логикой неэкономична. Так как добавление новой функции требует ввода дополнительного блока. Программируемая логика позволяет сделать это добавлением блока программы. Число программ ограничено возможностями ПЗУ и блока управления.
- Повышение точности — наиболее важный момент. Уменьшение погрешностей по сравнению с обычными цифровыми приборами при прочих равных условиях достигается за счет исключения систематических погрешностей в процессе самокалибровки: коррекция смещения нуля, учет собственной АЧХ прибора, учет нелинейности преобразователей. Самокалибровка в данном случае — это измерение поправок или поправочных множителей и запоминание их в ОЗУ с целью использования на этапе обработки опытных данных.
- Уменьшение влияния случайных погрешностей (путем проведения многократных измерений с последующей обработкой выборки — усреднением, вычислением мат. ожидания и пр.). Выявление и устранение грубых погрешностей (промахов). Вычисление и индикация оценки погрешности прямо в процессе измерения.
- Компенсация внутренних шумов и повышение чувствительности средства измерения. Простое усреднение сигнала на входе прибора требует достаточно большого времени tycp. Один из вариантов — проведение многократных измерений и усреднение результатов с целью компенсации случайной составляющей измерительного сигнала. Пример — микропроцессорный ВЧ вольтметр среднеквадратического значения.
- Расширение измерительных возможностей путем широкого использования косвенных и совокупных измерений, воспринимаемых оператором в этом случае как прямые (поскольку результат обработки появляется на индикаторе сразу после проведения измерения). Напомним, что косвенные измерения включают в себя вычисления результата по опытным данным по известному алгоритму. Совокупные измерения предполагают измерение нескольких одноименных физических величин путем решения системы уравнений, получаемых при прямых измерениях сочетаний этих величин. (Например, измерение сопротивления различных сочетаний резисторов — последовательное, параллельное, последовательно-параллельное, позволяют рассчитать сопротивление каждого из них). В этих случаях микропроцессор осуществляет управление процессом измерения по программе и проводит обработку опытных данных. Результат расчетов воспринимается оператором как результат прямых измерений, поскольку расчет делается быстро.
- Упрощение и облегчение управления прибором. Все управление производится с кнопочной панели, выносные клавиатуры используют редко. Чем меньше кнопок, тем более «разумным» является прибор. Автоматизация установок прибора приводит к упрощению его использования (выбор пределов измерения, автоматическая калибровка и пр.). В ряде приборов использую контроль за ошибочными действиями оператора — индикация его неверных действий на табло или экране. Упрощает измерения визуализация результатов на экране в удобном виде, с дополнительными шкалами. Ряд приборов предусматривает вывод результатов на печатающее устройство или портативный носитель информации.
См. также
- Микропроцессорная секция
- Микропроцессор
- Интегральная схема
- Микропроцессорные средства и системы (журнал)
Ссылки
- Ю. В. Новиков, П. К. Скоробогатов. Основы микропроцессорной техники / Intuit.ru
- Электроника
Wikimedia Foundation . 2010 .
Микропроцессорные системы

Применение микропроцессорных систем практически во всех электрических устройствах — важнейшая черта технической инфраструктуры современного общества. Электроэнергетика, промышленность, транспорт, системы связи существенно зависят от компьютерных систем управления. Микропроцессорные системы встраиваются в измерительные приборы, электрические аппараты, осветительные установки и д.р.
Всё это обязывает электрика знать хотя бы основы работы микропроцессорной техники.
Микропроцессорные системы предназначены для автоматизации обработки информации и управления различными процессами.
Понятие «Микропроцессорная система» очень широко и объединяет такие понятия как «Электронно-вычислительная машина (ЭВМ)», «управляющая ЭВМ», «Компьютер» и т.п.
Микропроцессорная система включает в себя аппаратное обеспечение или по-английски – hardware и программное обеспечение (ПО) — software.
Микропроцессорная система работает с цифровой информацией , которая представляет собой последовательность цифровых кодов.
В основе любой микропроцессорной системы лежит микропроцессор , который способен воспринимать только двоичные числа (составленные из 0 и 1). Двоичные числа записываются посредством двоичной системы счисления. Например, в повседневной жизни мы пользуемся десятичной системой счисления, в которой для записи чисел используются десять символов или цифр 0,1,2,3,4,5,6,7,8,9. Соответственно в двоичной системе таких символов (или цифр) всего два – 0 и 1.
Необходимо понимать, что система счисления – это всего лишь правила записи чисел, и выбор типа системы определятся удобством применения. Выбор двоичной системы обусловлен её простотой, а значит надёжностью работы цифровых устройств и лёгкостью их технической реализации.
Рассмотрим единицы измерения цифровой информации:
Бит (от английского «BInary digiT» — двоичная цифра) принимает только два значения: 0 или 1. Можно закодировать логическое значение «да»» или «нет», состояние «включено» или «выключено», состояние «открыто» или «закрыто» и т.п.
Группа из восьми бит называется байтом, например 10010111. Один байт позволяет кодировать 256 значений: 00000000 – 0, 11111111 — 255.
Бит – наименьшая единица представления информации.
Байт — наименьшая единица обработки информации. Байт — часть машинного слова, состоящая обычно из 8 бит и используемая как единица количества информации при её хранении, передаче и обработке на ЭВМ. Байт служит для представления букв, слогов и специальных символов (занимающих обычно все 8 бит) или десятичных цифр (по 2 цифры в 1 байт).
Два взаимосвязанных байта называется словом, 4 байта – двойное слово, 8 байт – учетверённое слово.
Почти вся информация, которая нас окружает, является аналоговой. Поэтому, прежде чем информация попадёт на обработку в процессор, она подвергается преобразованию посредством АЦП (аналого-цифровой преобразователь). Кроме того, информация кодируется в определённом формате и может быть числовой, логической, текстовой (символьной), графической, видео и д.р.
Например, для кодирования текстовой информации используется таблица кодов ASCII (от англ. American Standard Code for Information Interchange — Американский стандартный код для обмена информацией). Запись одного символа осуществляется одним байтом, который может принимать 256 значений. Графическая информация разбивается на точки (пиксели) и производится кодирование цвета и положение каждой точки по горизонтали и вертикали.
Кроме двоичной и десятичной системы в МС используют шестнадцатеричную систему, в которой для записи чисел используются символы 0. 9 и A. F. Её применение обуславливается тем, что один байт описывается двухразрядным шестнадцатеричным числом, что значительно сокращает запись цифрового кода и делает его более читаемым (11111111 – FF).
Таблица 1 – Запись чисел в различных системах счисления
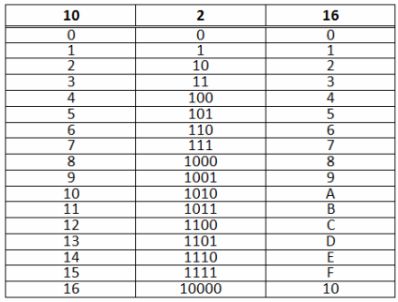
Для определения значения числа (например, значения числа 100 для разных систем счисления может составлять 42, 10010, 25616), в конце числа добавляют латинскую букву, обозначающую систему счисления: для двоичных чисел букву b, для шестнадцатеричных — h, для десятичных – d. Число без дополнительного обозначения считается десятичным.
Перевод чисел из одной системы в другую и основные арифметические и логические операции над числами позволяет производить инженерный калькулятор (стандартное приложение операционной системы Windows).
Структура микропроцессорной системы
Основу микропроцессорной системы составляет микропроцессор (процессор), который выполняет функции обработки информации и управления. Остальные устройства, входящие в состав микропроцессорной системы, обслуживают процессор, помогая ему в работе.
Обязательными устройствами для создания микропроцессорной системы являются порты ввода/вывода и отчасти память . Порты ввода/вывода связывают процессор с внешним миром, обеспечивая ввод информации для обработки и вывод результатов обработки, либо управляющих воздействий. К портам ввода подключают кнопки (клавиатуру), различные датчики; к портам вывода — устройства, которые допускают электрическое управление: индикаторы, дисплеи, контакторы, электроклапаны, электродвигатели и т.д.
Память нужна в первую очередь для хранения программы (либо набора программ), необходимой для работы процессора. Программа — это последовательность команд, понятных процессору, написанная человеком (чаще программистом).
Структура микропроцессорной системы представлена на рисунке 1. В упрощённом виде процессор состоит из арифметически-логического устройства (АЛУ), осуществляющего обработку цифровой информации и устройства управления (УУ).
Память обычно включает постоянно-запоминающее устройство (ПЗУ), являющееся энергонезависимым и предназначенное для долговременного хранения информации (например, программ), и оперативно-запоминающее устройство (ОЗУ), предназначенное для временного хранения данных.

Рисунок 1 – Структура микропроцессорной системы
Процессор, порты и память взаимодействуют между собой посредством шин. Шина – это набор проводников, объединённых по функциональному признаку. Единый набор системных шин называют внутрисистемная магистраль , в которой выделяют:
- шину данных DB (Data Bus), по которой производится обмен данными между ЦП, памятью и портами;
- шину адреса AB (Address Bus), используемой для адресации процессором ячеек памяти и портов;
- шину управления CB (Control Bus), набор линий, передающих различные управляющие сигналы от процессора на внешние устройства и обратно.
Микропроцессор — программно-управляемое устройство, предназначенное для обработки цифровой информации и управления процессом этой обработки, выполненное в виде одной (или нескольких) интегральной схемы с высокой степенью интеграции электронных элементов.
Микропроцессор характеризуется большим числом параметров, поскольку он одновременно является сложным программно-управляемым устройством и электронным прибором (микросхемой). Поэтому для микропроцессора важны, как тип корпуса, так и система команд процессора . Возможности микропроцессора определяются понятием архитектуры микропроцессора.
Приставка «микро» в названии процессора означает, что выполняется он по микронной технологии.

Рисунок 2 – Внешний вид микропроцессора Intel Pentium 4
В ходе работы микропроцессор считывает команды программы из памяти или порта ввода и исполняет их. Что означает каждая команда, определяется системой команд процессора. Система команд заложена в архитектуре микропроцессора и выполнение кода команды выражается в проведении внутренними элементами процессора определённых микроопераций.
Архитектура микропроцессора — это его логическая организация; она определяет возможности микропроцессора по аппаратной и программной реализации функций, необходимых для построения микропроцессорной системы.
Основные характеристики микропроцессоров:
1) Тактовая частота (единица измерения МГц или ГГц) – количество тактовых импульсов за 1 секунду. Тактовые импульсы вырабатывает тактовый генератор, который чаще всего находится внутри процессора. Т.к. все операции (инструкции) выполняются по тактам, то от значения тактовой частоты зависит производительность работы (количество выполняемых операций в единицу времени). Частотой процессора можно варьировать в определённых пределах.
2) Разрядность процессора (8, 16, 32, 64 бит и т.д.) – определяет число байтов данных, обрабатываемых за один такт. Разрядность процессора определяется разрядностью его внутренних регистров. Процессор может быть 8-разрядным, 16-разрядным, 32-разрядным, 64-разрядным и т.д., т.е. данные обрабатываются порциями по 1, 2, 4, 8 байт. Понятно, что чем больше разрядность, тем выше производительность работы.
Внутренняя архитектура микропроцессора
Упрощенная внутренняя архитектура типового 8-разрядного микропроцессора показана на рисунке 3. В структуре микропроцессора можно выделить три основных части:
1) Регистры для временного хранения команд, данных и адресов;
2) Арифметико-логическое устройство (АЛУ) , которое реализует арифметические и ло-гические операции;
3) Схема управления и синхронизации — обеспечивает выборку команд, организует функционирование АЛУ, обеспечивает доступ ко всем регистрам микропроцессора, воспринимает и генерирует внешние управляющие сигналы.
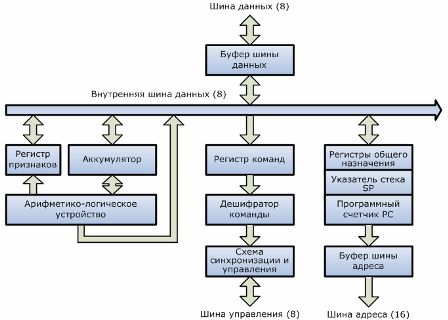
Рисунок 3 — Упрощенная внутренняя архитектура 8-разрядного микропроцессора
Как видно из схемы, основу процессора составляют регистры, которые делятся на специальные (имеющие определенное назначение) и регистры общего назначения.
Программный счетчик (PC) — регистр, содержащий адрес следующего командного байта. Процессор должен знать, какая команда будет выполняться следующей.
Аккумулятор – регистр, используемый в подавляющем большинстве команд логической и арифметической отработки; он одновременно является и источником одного из байт данных, которые требуются для операции АЛУ, и местом, куда помещается результат операции АЛУ.
Регистр признаков (или регистр флагов) содержит информацию о внутреннем состоянии микропроцессора, в частности о результате последней операции АЛУ. Регистр флагов не является регистром в обычном смысле, а представляет собой просто набор триггер-защелок (флаг поднят или опущен. Обычно имеются флаж¬ки нуля, переполнения, отрицательного результата и переноса.
Указатель стека (SP) — следит за положением стека, т. е. содержит адрес последней его использованной ячейки. Стек – способ организации хранения данных.
Регистр команды содержит текущий командный байт, который декодируется дешифратором команды.
Линии внешних шин изолированы от линий внутренней шины с помощью буферов, а основные внутренние элементы связаны быстродействующей внутренней шиной данных.
Для повышения производительности многопроцессорной системы функции центрального процессора могут распределяться между несколькими процессорами. В помощь центральному процессору в компьютер часто вводят сопроцессоры , ориентированные на эффективное исполнение каких-либо специфических функций. Широко распространены математические и графические , сопроцессоры ввода-вывода , разгружающие центральный процессор от несложных, но многочисленных операций взаимодействия с внешними устройствами.
На современном этапе основным направлением повышения производительности является разработка многоядерных процессоров , т.е. объединение в одном корпусе двух и более процессоров, с целью выполнения нескольких операций параллельно (одновременно).
Лидирующими компаниями по разработке и изготовлению процессоров являются Intel и AMD.
Алгоритм работы микропроцессорной системы
Алгоритм — точное предписание, однозначно задающее процесс преобразования исходной информации в последовательность операций, позволяющих решать совокупность задач определённого класса и получать искомый результат.
Главным управляющим элементом всей микропроцессорной системы является процессор . Именно он, за исключением нескольких особых случаев, управляет всеми остальными устройствами. Остальные же устройства, такие, как ОЗУ, ПЗУ и порты ввода/вывода являются ведомыми.
Сразу после включения процессор начинает читать цифровые коды из той области памяти, которая отведена для хранения программ. Чтение происходит последовательно ячейка за ячейкой, начиная с самой первой. В ячейке записаны данные, адреса и команды. Команда — это одно из элементарных действий, которое способен выполнить микропроцессор. Вся работа микропроцессора сводится к последовательному чтению и выполнению команд.
Рассмотрим последовательность действий микропроцессор во время выполнения команд программы:
1) Перед выполнением очередной команды микропроцессор содержит ее адрес в программном счетчике РС.
2) МП обращается к памяти по адресу, содержащемуся в РС, и считывает из памяти первый байт очередной команды в регистр команд.
3) Дешифратор команд декодирует (расшифровывает) код команды.
4) В соответствии с полученной от дешифратора информацией устройство управления вырабатывает упорядоченную во времени последовательность микроопераций, реализующих предписания команды, в том числе:
— извлекает операнды из регистров и памяти;
— выполняет над ними предписанные кодом команды арифметические, логические или другие операции;
— в зависимости от длины команды модифицирует содержимое РС;
— передает управление очередной команде, адрес которой снова находится в программном счетчике РС.
Совокупность команд микропроцессора можно разделить на три группы:
1) Команды перемещения данных
Перемещение происходит между памятью, процессором, портами ввода/вывода (каждый порт имеет свой собственный адрес), между регистрами процессора.
2) Команды преобразования данных
Любые данные (текст, рисунок, видеоролик и т.д.) представляют собой числа, а с числами можно выполнять только арифметические и логические операции. Поэтому к командам этой группы относятся сложение, вычитание, сравнение, логические операции и т.п.
3) Команда передачи управления
Очень редко программа состоит из одной последовательной команд. Подавляющее число алгоритмов требуют разветвления программы. Для того, чтобы программа имела возможность менять алгоритм своей работы в зависимости от какого-либо условия, и служат команды передачи управления. Данные команды обеспечивают протекание выполнения программы по разным путям и организуют циклы.
К внешним, относятся все устройства, находящиеся вне процессора (кроме оперативной памяти) и подключаемые через порты ввода/вывода. Внешние устройства можно подразделить на три группы:
1) устройства для связи человек-ЭВМ (клавиатура, монитор, принтер и т.д.);
2) устройства для связи с объектами управления (датчики, исполнительные механизмы, АЦП и ЦАП);
3) внешние запоминающие устройтсва большой ёмкости (жёсткий диск, дисководы).
Внешние устройства подключаются к микропроцессорной системе физически — с помощью разъёмов, и логически — с помощью портов (контроллеров).
Для взаимодействия процессора и внешних устройств применяется система (механизм) прерываний.
Это специальный механизм, который позволяет в любой момент, по внешнему сигналу заставить процессор приостановить выполнение основной программы, выполнить операции, связанные с вызывающим прерывание событием, а затем вернуться к выполнению основной программы.
У любого микропроцессора имеется хотя бы один вход запроса на прерывание INT (от слова Interrupt — прерывание).
Рассмотрим пример взаимодействия процессора персонального компьютера с клавиатурой (рисунок 4).
Клавиатура — устройство для ввода символьной информации и команд управления. Для подключения клавиатуры в компьютере имеется специальный порт клавиатуры (микросхема).
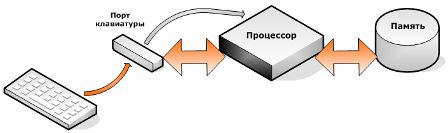
Рисунок 4 – Работа процессора с клавиатурой
1) При нажатии клавиши контроллер клавиатуры формирует цифровой код. Этот сигнал поступает в микросхему порта клавиатуры.
2) Порт клавиатуры посылает процессору сигнал прерывания. Каждое внешнее устройство имеет свой номер прерывания, по которому процессор его и распознаёт.
3) Получив прерывание от клавиатуры, процессор прерывает выполнение программы (например, редактор Microsoft Office Word) и загружает из памяти программу обработки кодов с клавиатуры. Такая программа называет драйвер.
4) Эта программа направляет процессор к порту клавиатуры, и цифровой код загружается в регистр процессора.
5) Цифровой код сохраняется в памяти, и процессор переходит к выполнению другой задачи.
Благодаря высокой скорости работы, процессор выполняет одновременно большое количество процессов.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Из чего состоит микропроцессорная система
Микропроцессорная система может быть описана на различных уровнях абстрактного представления.
Существующую микропроцессорную систему можно описать на любом известном уровне представления, но в начальной стадии проектирования ее можно описать только на концептуальном уровне. В процессе разработки системы происходит переход от одного уровня ее представления к другому, более детальному. Каждая абстракция несет в себе только информацию, которая соответствует данному уровню, и не содержит каких-либо сведений относительно более низких уровней. Микропроцессорная система может быть описана, например, на одном из следующих уровней абстрактного представления:
1) «черный ящик»;
2) структурный;
3) программный;
4) логический;
5) схемный .
На уровне «черного ящика» микропроцессорная система описывается внешними спецификациями; перечисляются внешние характеристики.
Структурный уровень создается компонентами микропроцессорной системы: микропроцессорами, запоминающими устройствами, устройствами ввода/вывода, внешними запоминающими устройствами, каналами связи. Микропроцессорная система описывается функциями отдельных устройств и их взаимосвязью, информационными потоками.
Программный уровень разделяется на два подуровня: команд процессора и языковой. Микропроцессорная система интерпретируется как последовательность операторов или команд, вызывающих то или иное действие над некоторой структурой данных.
Логический уровень присущ исключительно дискретным системам. На этом уровне выделяются два подуровня: переключательных схем и регистровых пересылок. Подуровень переключательных схем образуется вентилями и построенными на их основе операторами обработки данных. Переключательные схемы подразделяются на комбинационные и последовательностные; первые в отличие от последних не содержат запоминающих элементов. Поведение системы на этом уровне описывается алгеброй логики, моделью конечного автомата, входными/выходными последовательностями 1 и 0. Комбинационные схемы представляются таблицей истинности, в которой каждому входному набору значений сигналов ставится в соответствие набор значений сигналов на выходах. Последовательностные схемы могут описываться диаграммами или таблицами входов/выходов, в которых определены взаимно однозначные соответствия между входами схемы, внутренними состояниями (комбинациями значений элементов памяти) и выходами. Подуровень регистровых пересылок характеризуется более высокой степенью абстрагирования и представляет собой описание регистров и передачу данных между ними. Он включает в себя две части: информационную и управляющую. Информационная часть образуется регистрами, операторами и путями передачи данных. Управляющая часть определяет зависящие от времени сигналы, инициирующие пересылку данных между регистрами.
Сxемный уровень образуется резисторами и конденсаторами. Показателями поведения системы на этом уровне служат напряжение и ток, представляемые в функции времени или частоты. Этот уровень описания дискретной системы широко используется в описаниях аналоговых систем и не является ни наинизшим из возможных, ни достаточным для полной характеристики системы.
Ошибки, неисправности, дефекты
В жизненном цикле микропроцессорной системы, как любой дискретной системы, выделяются три стадии: проектирование, изготовление и эксплуатация. Каждая из стадий подразделяется на несколько фаз, для которых существуют вероятности возникновения конструктивных или физических неисправностей, приводящих систему в неработоспособное состояние. Поэтому на каждой фазе необходимы процедуры тестового контроля, направленные на обнаружение и локализацию неисправностей. Процедура тестового контроля может быть определена как проведение экспериментов с «черным ящиком». Дискретная система любой сложности или часть такой системы может рассматриваться как «черный ящик» с множеством входов и выходов. Правильность функционирования этого «черного ящика» должна устанавливаться путем подачи входных сигналов и наблюдения ответных выходных сигналов системы. В тех случаях, когда поведение «черного ящика» отличается от нормального, характеризуемого его спецификацией или представлениями человека, говорят о наличии ошибки. Ошибка вызывается некоторой неисправностью, представляющей собой некорректное состояние внутри «черного ящика». Неисправности классифицируют в соответствии с их причинами: физическая, если причиной ее служат либо дефекты элементов, либо физическое воздействие окружающей среды; субъективная (внесенная, нефизическая), если ее причиной служат ошибки проектирования, неправильный монтаж элементов, грубые ошибки оператора. Физические неисправности — непредусмотренные, нежелательные изменения значения одной или нескольких логических переменных в системе. Субъективные неисправности — конкретные проявления недостатков программного и аппаратного обеспечения и неправильных действий оператора, имеющих место при выполнении дискретной системой предписанных спецификацией действий .
Под субъективными неисправностями подразумеваются неисправности нефизические, вызванные недостатками различных схем, конструкций, программ, средств эксплуатации — компиляторов, ассемблеров, программ автоматизации проектирования, инструкции по эксплуатации, процедур и средств контроля и т.д. Субъективные неисправности делят на проектные и интерактивные.
Проектные неисправности вызваны недостатками, вносимыми в систему на различных стадиях реализации исходного задания при структурном проектировании, разработке алгоритмов, написании программ, трансляции в машинный код, детальном логическом и техническом проектировании, а также при последующих модификациях аппаратного и программного обеспечения. Интерактивные неисправности возникают, когда в процессе работы, технического обслуживания или отработки системы оператор вводит в нее через интерфейс человек-машина ложную информацию, не соответствующую текущему состоянию системы. Как правило, это происходит в результате непонимания инструкции для оператора или вследствие неточностей ввода информации.
Ошибка — проявление неисправности (физической или субъективной). В зависимости от уровня иерархической структуры системы термин «ошибка» может иметь различный смысл. Так, для дискретного устройства он означает появление неверных двоичных сигналов («0» вместо «1» и «1» вместо «0»); для программы ошибка означает отклонение поведения программы от заданного, приводящее к выдаче неверных результатов.
Следует четко разграничивать понятия «ошибка» и «неисправность». Неисправность может приводить или не приводить к ошибке в зависимости от состояния системы. В то же время возникновение ошибки обязательно говорит о существовании какой-то неисправности. Одна и та же ошибка может быть вызвана множеством неисправностей, а одна неисправность может служить причиной целого ряда ошибок. Например, если триггер, предназначенный для хранения кода переполнения разрядной сетки ЭВМ, вследствие неисправности все время находится в состоянии «0», то ошибки из-за неисправности не будет до тех пор, пока в процессе вычислений реально не возникнет арифметическое перепол-нение, при котором триггер останется в состоянии «0» вместо перехода в состояние «1». Однако даже и в этом случае такая ошибка процессора не обязательно приведет к ошибке на программном уровне, если в программе условие переполнения не проверяется и, следовательно, ни с какой стороны не влияет на ее дальнейшее поведение.
Дефекты — физические изменения параметров компонентов системы, выходящие за допустимые пределы. Их называют сбоями, если они носят временный характер, и отказами, если они постоянны.
Существует такая причинноследственная связь:
1) дефект, представляющий собой изменение в значениях параметров компонентов, вызывает неисправность, т.е. отклонение от заданного значения (значений) логической переменной (переменных) в точке дефекта;
2) неисправность приводит к подаче неверных логических значений на вход (входы) остальной части системы и может вызывать ошибки, проявляющиеся при последующей работе других исправных логических схем;
3) ошибки приводят к появлению неправильных результатов или к отклонению от нормального хода исполнения программы.
Из чего состоит микропроцессорная система
Основные характеристики микропроцессора
Микропроцессор характеризуется:
1) тактовой частотой, определяющей максимальное время выполнения переключения элементов в ЭВМ;
2) разрядностью, т.е. максимальным числом одновременно обрабатываемых двоичных разрядов.
Разрядностть МП обозначается m/n/k/ и включает:
m — разрядность внутренних регистров, определяет принадлежность к тому или иному классу процессоров;
n — разрядность шины данных, определяет скорость передачи информации;
k — разрядность шины адреса, определяет размер адресного пространства. Например, МП i8088 характеризуется значениями m/n/k=16/8/20;
3) архитектурой. Понятие архитектуры микропроцессора включает в себя систему команд и способы адресации, возможность совмещения выполнения команд во времени, наличие дополнительных устройств в составе микропроцессора, принципы и режимы его работы. Выделяют понятия микроархитектуры и макроархитектуры.
Микроархитектура микропроцессора — это аппаратная организация и логическая структура микропроцессора, регистры, управляющие схемы, арифметико-логические устройства, запоминающие устройства и связывающие их информационные магистрали.
Макроархитектура — это система команд, типы обрабатываемых данных, режимы адресации и принципы работы микропроцессора.
В общем случае под архитектурой ЭВМ понимается абстрактное представление машины в терминах основных функциональных модулей, языка ЭВМ, структуры данных.
Структура типового микропроцессора
Архитектура типичной небольшой вычислительной системы на основе микроЭВМ показана на рис. 2.1 Такая микроЭВМ содержит все 5 основных блоков цифровой машины: устройство ввода информации, управляющее устройство (УУ), арифметико-логическое устройство (АЛУ) (входящие в состав микропроцессора), запоминающие устройства (ЗУ) и устройство вывода информации.
Рис. 2.1. Архитектура типового микропроцессора.
Микропроцессор координирует работу всех устройств цифровой системы с помощью шины управления (ШУ). Помимо ШУ имеется 16-разрядная адресная шина (ША), которая служит для выбора определенной ячейки памяти, порта ввода или порта вывода. По 8-разрядной информационной шине или шине данных (ШД) осуществляется двунаправленная пересылка данных к микропроцессору и от микропроцессора. Важно отметить, что МП может посылать информацию в память микроЭВМ или к одному из портов вывода, а также получать информацию из памяти или от одного из портов ввода.
Постоянное запоминающее устройство (ПЗУ) в микроЭВМ содержит некоторую программу (на практике программу инициализации ЭВМ). Программы могут быть загружены в запоминающее устройство с произвольной выборкой (ЗУПВ) и из внешнего запоминающего устройства (ВЗУ). Это программы пользователя.
В качестве примера, иллюстрирующего работу микроЭВМ, рассмотрим процедуру, для реализации которой нужно выполнить следующую последовательность элементарных операций:
1. Нажать клавишу с буквой «А» на клавиатуре.
2. Поместить букву «А» в память микроЭВМ.
3. Вывести букву «А» на экран дисплея.
Это типичная процедура ввода-запоминания-вывода, рассмотрение которой дает возможность пояснить принципы использования некоторых устройств, входящих в микроЭВМ.
На рис. 2.2 приведена подробная диаграмма выполнения процедуры ввода-запоминания-вывода. Обратите внимание, что команды уже загружены в первые шесть ячеек памяти. Хранимая программа содержит следующую цепочку команд:
1. Ввести данные из порта ввода 1.
2. Запомнить данные в ячейке памяти 200.
3. Переслать данные в порт вывода 10.
Рис. 2.2. Диаграмма выполнения процедуры ввода-запоминания-вывода.
В данной программе всего три команды, хотя на рис. 2.2 может показаться, что в памяти программ записано шесть команд. Это связано с тем, что команда обычно разбивается на части. Первая часть команды 1 в приведенной выше программе — команда ввода данных. Во второй части команды 1 указывается, откуда нужно ввести данные (из порта 1). Первая часть команды, предписывающая конкретное действие, называется кодом операции (КОП), а вторая часть — операндом. Код операции и операнд размещаются в отдельных ячейках памяти программ. На рис. 2.2 КОП хранится в ячейке 100, а код операнда — в ячейке 101 (порт 1); последний указывает откуда нужно взять информацию.
В МП на рис. 2.2 выделены еще два новых блока — регистры: аккумулятор и регистр команд.
Рассмотрим прохождение команд и данных внутри микроЭВМ с помощью занумерованных кружков на диаграмме. Напомним, что микропроцессор — это центральный узел, управляющий перемещением всех данных и выполнением операций.
Итак, при выполнении типичной процедуры ввода-запоминания-вывода в микроЭВМ происходит следующая последовательность действий:
1. МП выдает адрес 100 на шину адреса. По шине управления поступает сигнал, устанавливающий память программ (конкретную микросхему) в режим считывания.
2. ЗУ программ пересылает первую команду («Ввести данные») по шине данных, и МП получает это закодированное сообщение. Команда помещается в регистр команд. МП декодирует (интерпретирует) полученную команду и определяет, что для команды нужен операнд.
3. МП выдает адрес 101 на ША; ШУ используется для перевода памяти программ в режим считывания.
4. Из памяти программ на ШД пересылается операнд «Из порта 1». Этот операнд находится в программной памяти в ячейке 101. Код операнда (содержащий адрес порта 1) передается по ШД к МП и направляется в регистр команд. МП теперь декодирует полную команду («Ввести данные из порта 1»).
5. МП, используя ША и ШУ, связывающие его с устройством ввода, открывает порт 1. Цифровой код буквы «А» передается в аккумулятор внутри МП и запоминается.Важно отметить, что при обработке каждой программной команды МП действует согласно микропроцедуре выборки-декодирования-исполнения.
6. МП обращается к ячейке 102 по ША. ШУ используется для перевода памяти программ в режим считывания.
7. Код команды «Запомнить данные» подается на ШД и пересылается в МП, где помещается в регистр команд.
8. МП дешифрирует эту команду и определяет, что для нее нужен операнд. МП обращается к ячейке памяти 103 и приводит в активное состояние вход считывания микросхем памяти программ.
9. Из памяти программ на ШД пересылается код сообщения «В ячейке памяти 200». МП воспринимает этот операнд и помещает его в регистр команд. Полная команда «Запомнить данные в ячейке памяти 200» выбрана из памяти программ и декодирована.
10. Теперь начинается процесс выполнения команды. МП пересылает адрес 200 на ША и активизирует вход записи, относящийся к памяти данных.
11. МП направляет хранящуюся в аккумуляторе информацию в память данных. Код буквы «А» передается по ШД и записывается в ячейку 200 этой памяти. Выполнена вторая команда. Процесс запоминания не разрушает содержимого аккумулятора. В нем по-прежнему находится код буквы «А».
12. МП обращается к ячейке памяти 104 для выбора очередной команды и переводит память программ в режим считывания.
13. Код команды вывода данных пересылается по ШД к МП, который помещает ее в регистр команд, дешифрирует и определяет, что нужен операнд.
14. МП выдает адрес 105 на ША и устанавливает память программ в режим считывания.
15. Из памяти программ по ШД к МП поступает код операнда «В порт 10», который далее помещается в регистр команд.
16. МП дешифрирует полную команду «Вывести данные в порт 10». С помощью ША и ШУ, связывающих его с устройством вывода, МП открывает порт 10, пересылает код буквы «А» (все еще находящийся в аккумуляторе) по ШД. Буква «А» выводится через порт 10 на экран дисплея.
В большинстве микропроцессорных систем (МПС) передача информации осуществляется способом, аналогичным рассмотренному выше. Наиболее существенные различия возможны в блоках ввода и вывода информации.
Подчеркнем еще раз, что именно микропроцессор является ядром системы и осуществляет управление всеми операциями. Его работа представляет последовательную реализацию микропроцедур выборки-дешифрации-исполнения. Однако фактическая последовательность операций в МПС определяется командами, записанными в памяти программ.
Таким образом, в МПС микропроцессор выполняет следующие функции:
— выборку команд программы из основной памяти;
— дешифрацию команд;
— выполнение арифметических, логических и других операций, закодированных в командах;
— управление пересылкой информации между регистрами и основной памятью, между устройствами ввода/вывода;
— отработку сигналов от устройств ввода/вывода, в том числе реализацию прерываний с этих устройств;
— управление и координацию работы основных узлов МП.