Электромеханические и механические характеристики двигателей постоянного тока независимого возбуждения (дпт нв)
Электромеханические и электромагнитные процессы в ДПТ НВ (рисунок 1) описываются уравнениями электрического равновесия (Кирхгофа) цепей якоря и обмотки возбуждения, а также уравнением электромагнитного момента:

(2.1)
Из совместного решения системы уравнений (2.1) получаем уравнение электромеханической характеристики ω = f(I)

(2.2)
и уравнение механической характеристики ω = f(M)

. (2.3)
В установившемся режиме работы привода
,
и уравнения 2, 3 приобретают вид

(2.4)

(2.5)

Характеристики, построенные при номинальных значениях напряжения и потока и Rдоб =0, называются естественными, при UЯ ≠ UН, Ф ≠ ФН или Rдоб ≠ 0 – искусственными электромеханическими или механическими характеристиками. Характерными точками электромеханической характеристики (рисунок 2) являются точки идеального холостого хода (I = 0, ω = ω0 = UН/kФН), короткого замыкания (I = IК = UН/RЯΣ, ω = 0) и номинального режима (IЯ = IН, ω = ωН). По любой паре из этих координат можно построить характеристику.
Используя введенные значения жесткости характеристик
 ;
;  (2.6)
(2.6)
можно записать следующие выражения для электромеханических и механических характеристик:
 ;
;  ;
;  (2.7)
(2.7)
Режимы работы привода, приведенные на рисунке 2, поясняются ниже.

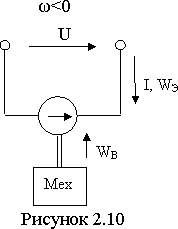

В двигательном режиме работы (рисунок 3) ЭД потребляет энергию из электрической сети и передает на вал механическую энергию. В режимепротивовключения (рисунок 4) ЭД потребляет энергию, накопленную механизмом, и рассеивает в элементах двигателя и добавочных сопротивлениях. В режиме рекуперативного (генераторного) торможения (рисунок 5) ЭД потребляет энергию, накопленную механизмом, и передает ее в электрическую сеть.
Лекция 3Искусственные электромеханические и механические характеристики дпт нв. Режимы торможения дпт нв
Цель: изучить влияние на механические характеристики и режимы работы ЭП различных параметров

ПриRдоб ≠0 получаем искусственные реостатные электромеханичеcкие характеристики. Увеличение в (2.4, 2.5) RЯΣ приводит к уменьшению величины тока короткого замыкания (IК = UН/RЯΣ) при неизменной скорости холостого хода ω0 = UН/kФН (рисунок 3.1). При неизменном магнитном потоке Ф = ФН, механические характеристики будут аналогичны эл.механическим.
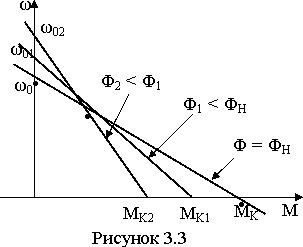
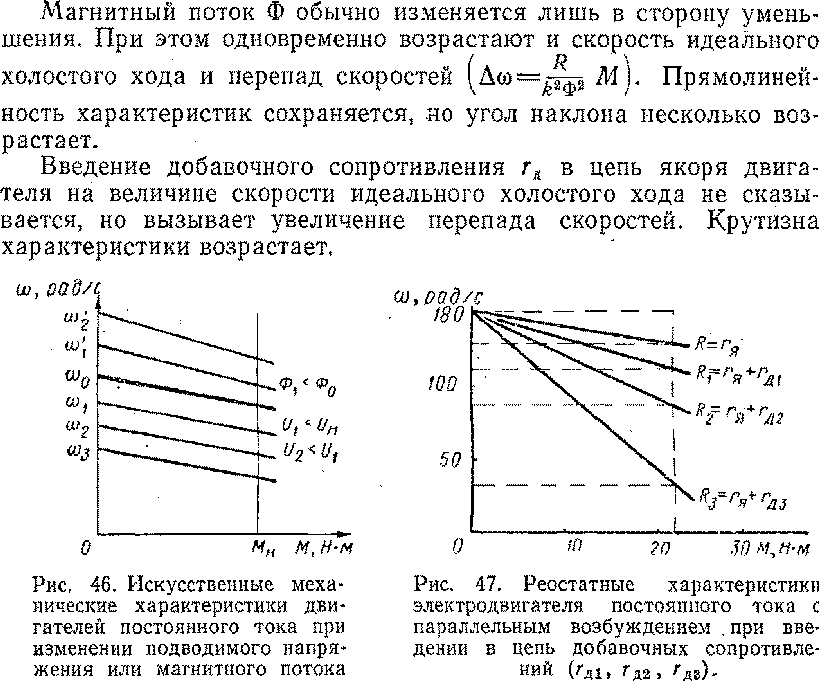
Магнитный поток машины можно изменять только в сторону уменьшения. При этом скорость холостого хода ω0 = UН/kФН возрастает при неизменном значении тока короткого замыкания IК = UН/RЯΣ (рисунок 3.2 – электромеханическая характеристика при Ф — var). Момент короткого замыкания МК =kФIК при Ф — var снижается. Механическая характеристика изображена на рисунке 3.3.

Напряжение, подаваемое на якорьмашины, можно изменять только в сторону уменьшения от номинального значения. При этом пропорционально напряжению снижаются и скорость холостого хода ω0 = UН/kФН , и значение тока короткого замыкания IК = UН/RЯΣ (рисунок 3.4 – электромеханическая характеристика при U — var). Момент машины М = kФI при Ф — const пропорционален току якоря и механическая характеристика имеет аналогичный вид.

В соответствии с рассмотренными режимами работы электропривода, следует выделить следующие способы торможения ДПТ НВ:
Электромеханические свойства двигателей постоянного тока

Двигатели постоянного тока с плавным регулированием частоты вращения находят применение в приводах различных машин, станков и установок. Наряду с широким пределом регулирования частоты вращения они дают возможность получать механические характеристики различной (требуемой) жесткости.
Из курса электротехники известно, что уравнение механической характеристики [ n =f(M) ] можно записать в виде

где коэффициенты Се и См зависят от конструктивных данных двигателя; U — напряжение сети; Ф — магнитный поток двигателя; R — сопротивление цепи якоря.
Формула показывает, что если U, R и Ф постоянны, механическая характеристика двигателя параллельного возбуждения представляет прямую линию (рис.). Если в цепи якоря нет сопротивлений, то механическая характеристика естественная (прямая 1, рис.а). Точка А соответствует номинальной частоте вращения n н, а n o называют частотой идеального холостого хода. Жесткость характеристики определяется сопротивлением двигателя R’, куда входит сопротивление обмотки якоря, дополнительных полюсов, компенсационной обмотки, щеток. Влияние сопротивления в цепи якоря на характеристику иллюстрируется прямыми 2 и 3 (см. рис.а).
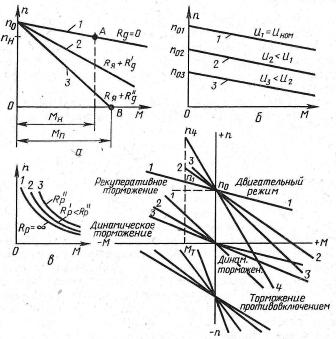
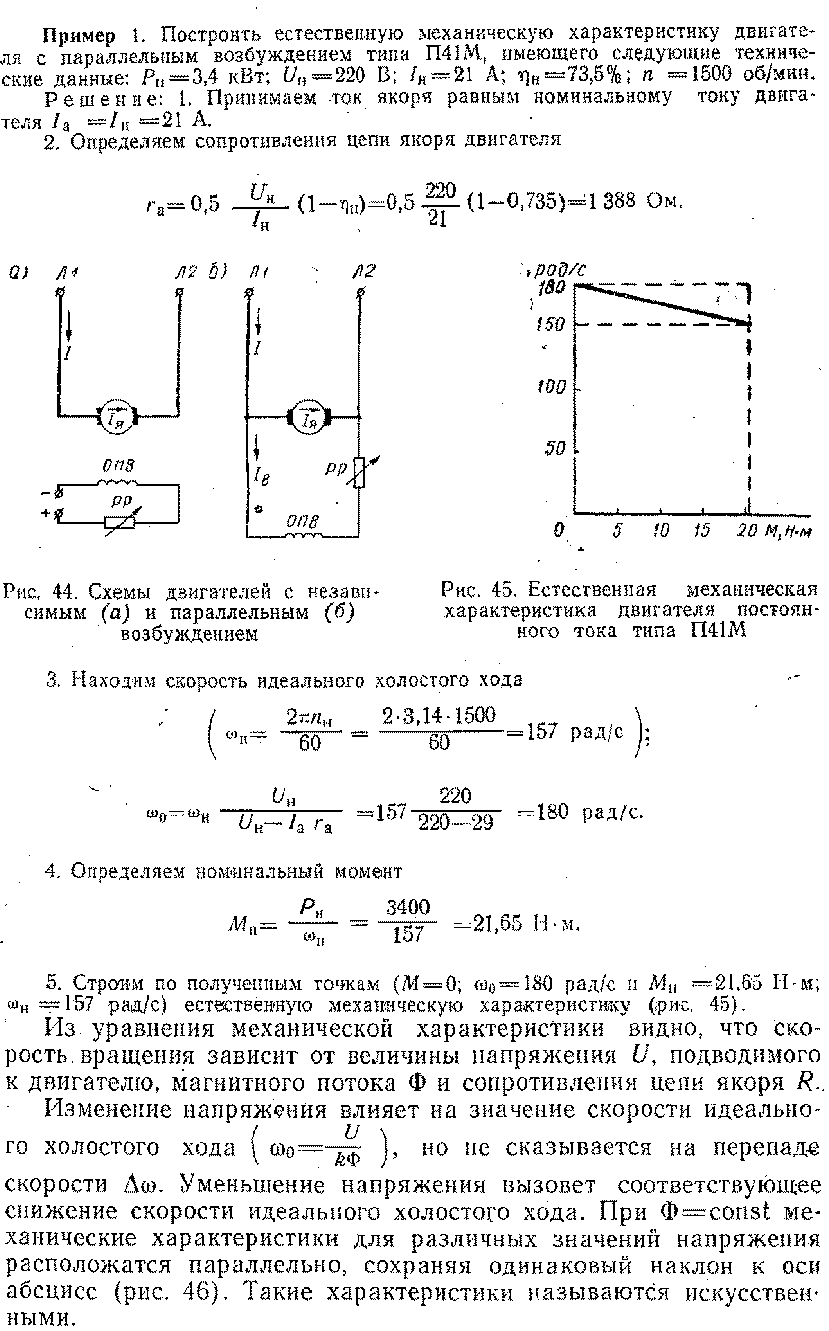
Рис. 1. Механические характеристики двигателей постоянного тока: а — при изменении сопротивления в цепи ротора, б — при изменении напряжения в цепи якоря двигателя постоянного тока с независимым возбуждением, в — при регулировании частоты вращения шунтированием обмотки возбуждения двигателя с последовательным возбуждением, г — при различных режимах торможения.
Формула позволяет оценить влияние напряжения U и потока Ф. При изменении U механическая характеристика двигателя с независимым возбуждением смещается параллельно естественной (рис.б); частота вращения холостого хода при постоянных R и U изменяется обратно пропорционально потоку.
Из формулы при n = 0 имеем

т. е. пусковой момент пропорционален потоку.
Таким образом, частота вращения двигателя может регулироваться изменением магнитного потока, напряжения, подводимого к обмотке якоря, введением сопротивлений в цепь якоря.
Регулирование частоты вращения двигателя изменением Ф применяют довольно часто, так как регулирование происходит плавно, без больших потерь энергии, поддается автоматизации. Диапазон регулирования в сторону увеличения частоты вращения не превышает 1:4, его можно расширить введением небольшой стабилизирующей обмотки последовательного возбуждения наряду с обмоткой дополнительных полюсов.
Регулирование частоты вращения изменением напряжения, подаваемого в цепь якоря двигателя, широко используют у двигателя независимого возбуждения (рис.б). В настоящее время выпускают двигатели с диапазоном регулирования до 1:8, диапазон увеличивается при применении тиристорных преобразователей.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Ранее на эту тему: Электропривод
Судовой электрик — Электромеханические характеристики двигателей постоянного тока
Эксплуатационные свойства электродвигателей определяются их характеристиками, выражающими графическую зависимость между угловой скоростью вращения двигателя, током якоря, моментом, потоком и другими параметрами.
Важнейшими являются механическая и скоростная характеристики. Механическая характеристика выражает зависимость между угловой скоростью вращения ω и создаваемым двигателем моментом М, т. е. зависимость w=f(M).
Скоростная характеристика представляет собой зависимость между угловой скоростью вращения и током якоря w=f(I) при U=const и Iв= const.
Почти у всех электрических двигателей угловая скорость вращения уменьшается с увеличением момента сопротивления. Степень изменения угловой скорости вращения с изменением момента зависит от типа, двигателя и определяется жесткостью характеристики. По степени жесткости различают:
абсолютно жесткую механическую характеристику, при которой угловая скорость вращения остается неизменной и не зависит от величины момента; такую характеристику имеют синхронные двигатели;
жесткую механическую характеристику, при которой угловая скорость вращения с увеличением момента на валу двигателя несколько уменьшается, но в небольших пределах; данную характеристику имеют двигатели постоянного тока с параллельным возбуждением и асинхронные электродвигатели (в пределах рабочей части механической характеристики);
мягкую механическую характеристику, при которой всякое изменение момента вызывает резкое изменение угловой скорости вращения; такие характеристики имеют двигатели постоянного тока с последовательным возбуждением и двигатели со смешанным возбуждением с преобладающей, последовательной обмоткой.
Кроме того, различают механические характеристики естественные и искусственные. Естественную механическую характеристику строят при номинальных значениях напряжения и магнитного потока двигателя и отсутствии в цепи его якоря добавочных сопротивлений.
Искусственную механическую характеристику строят для условий, отличных от номинальных, например, введение в цепь якоря двигателя постоянного тока или в цепи фазного ротора асинхронного двигателя дополнительных сопротивлений, отклонение величины напряжения, подводимого к двигателю, от номинальной, изменение величины тока возбуждения (величины магнитного потока) у двигателей постоянного тока и т. д.
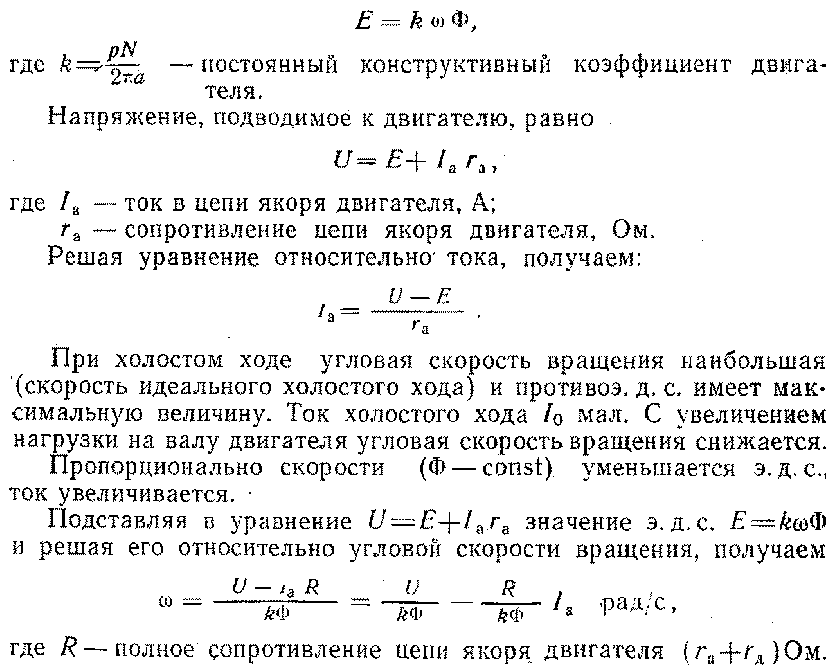
Рассмотрим электромеханические характеристики двигателей постоянного тока. При вращении якоря двигателя в магнитном поле полюсов в его обмотке наводится электродвижущая сила (противоэ.д.с.), величина которой определяется уравнением
Полученное уравнение называется скоростной характеристикой двигателя.
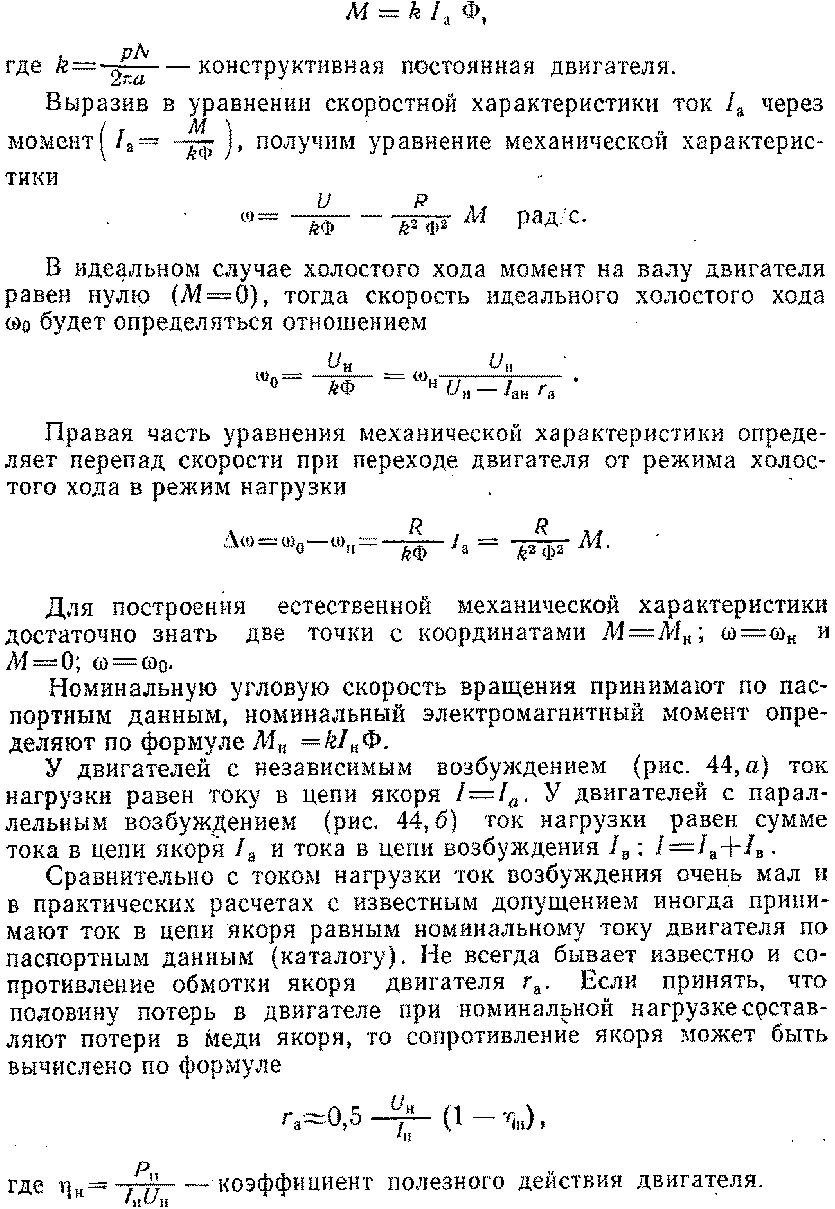
Вращающий момент на валу двигателя определяется уравнением
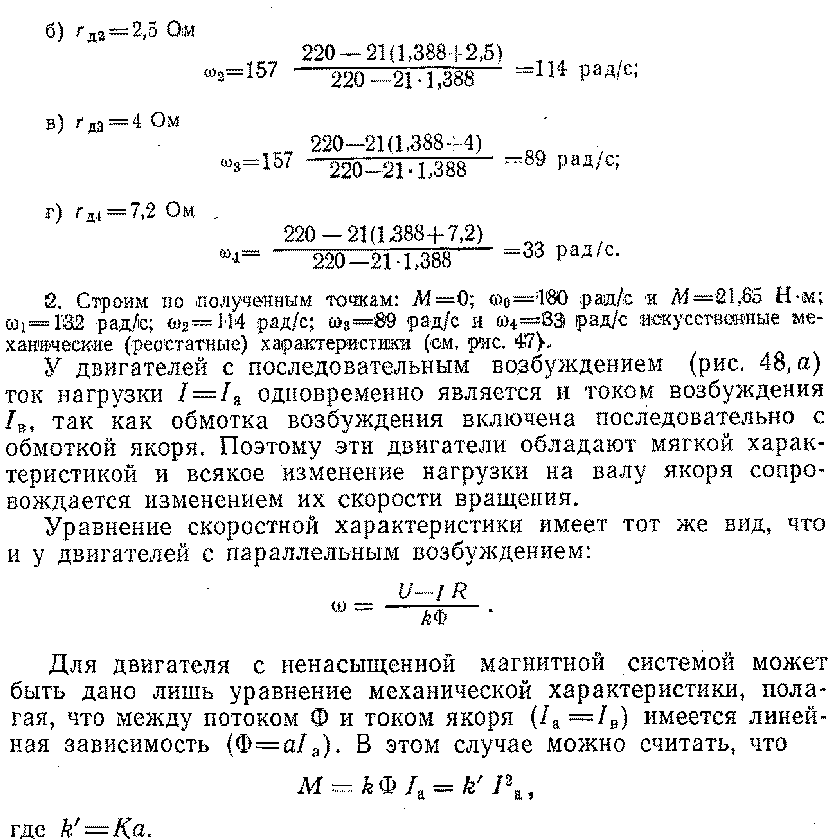
Вводя в цепь якоря различные по величине добавочные сопротивления, можно получить семейство искусственных механических реостатных характеристик с различной степенью жесткости. При этом все характеристики будут проходить через одну общую для них точку на оси ординат, соответствующую скорости идеального холостого хода (рис. 47).
Угловая скорость вращения электродвигателя при введении в цепь его якоря добавочного сопротивления гд может быть вычислена по формуле

Магнитный поток пропорционален квадрату тока якоря. Следовательно, при увеличении тока нагрузки вращающий момент двигателя резко возрастает. В то же время увеличение момента сопротивления на валу двигателя сопровождается сравнительно небольшим ростом тока в цепи якоря.
Введение в цепь якоря двигателя с последовательным возбуждением добавочных сопротивлений приводит к уменьшению скорости двигателя, характеристики смещаются вниз и мягкость их увеличивается (рис. 48,б). Особенностью механических характеристик такого двигателя является отсутствие режима идеального холостого хода.
При нагрузке I=0 магнитный поток Ф≈0 и в соответствии с уравнением скоростной характеристики скорость вращения двигателя стремится к бесконечности. Поэтому двигатель с последовательным возбуждением нельзя пускать на холостом ходу и с нагрузкой менее 25% номинальной.
Способность двигателей с последовательным возбуждением развивать большие вращающие моменты при малых скоростях вращения, и наоборот, большие скорости при малых моментах обусловила их использование в тяговых и подъемно-транспортных механизмах.

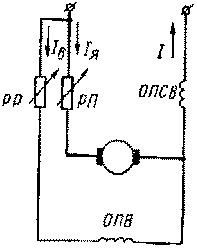
Рис. 49. Схема двигателя со смешанным возбуждением
Двигатели со смешанным возбуждением имеют две обмотки возбуждения — параллельную и последовательную (рис. 49), и их результирующий магнитный поток создается магнитодвижущими силами обеих обмоток.
При согласном включении обмоток результирующий магнитный поток равен , при встречном
, при встречном . Наиболее распространено согласное включение обмоток.
. Наиболее распространено согласное включение обмоток.
Из-за ряда трудно учитываемых факторов для механической характеристики двигателей со смешанным возбуждением аналитического выражения нет. Пользуются универсальными характеристиками, в которых графические зависимости скорости вращения и момента от тока нагрузки выражены в относительных единицах. Зная номинальные данные двигателя, всегда можно построить его механические характеристики на основании универсальных характеристик.
Электромеханические и механические характеристики двигателей постоянного тока с независимым и параллельным возбуждением

Вид электромеханической и механической характеристик двигателей постоянного тока зависит от способа возбуждения, поэтому рассмотрим сначала характеристики двигателей с независимым возбуждением.

Схема двигателя постоянного тока с независимым возбуждением.
Напряжение, подводимое к двигателю должно быть достаточным, чтобы создать ЭДС якоря Eа и покрыть потери на активное сопротивление якорной цепи.
Электромеханической характеристикой двигателя постоянного тока называется зависимость скорости вращения от тока якоря.
Если подать напряжение на обмотку якоря при отсутствии тока на обмотке возбуждения, то магнитный поток будет равен нулю, а скорость будет стремиться к бесконечности. Такое явление называется разносом двигателя. Чтобы избежать разноса двигателя используются электродвигатели с параллельным возбуждением – двигатели, у которых обмотка возбуждения соединяется внутри машины параллельно обмотке якоря.
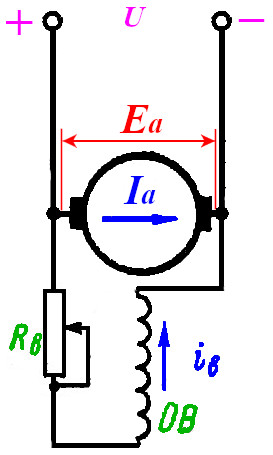
Схема двигателя постоянного тока с параллельным возбуждением.
Уравнение механической характеристики двигателя постоянного тока с параллельным и независимым возбуждением:
Как видно из формул, зависимость между скоростью и током якоря носит линейный характер, следовательно, электромеханическая характеристика будет представлять собой прямую линию.
Рассмотрим характерные точки электромеханической характеристики:
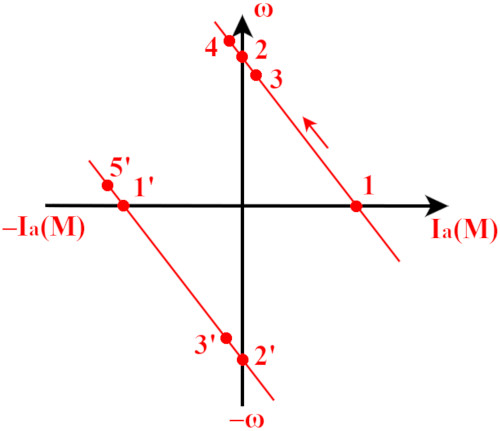
Электромеханическая характеристика двигателя постоянного тока с параллельным возбуждением.
1. ω = 0; Iа = Iп = U / rа
Точка 1 – пусковая точка. С нее начинается разгон двигателя.
Пусковой ток Iп = (8÷10) Iн
4. ω > ω0; Iа < 0
Генераторный режим работы двигателя (режим рекуперативного торможения).
5. ω < 0; Iа > Iп
Если под действием производственного механизма изменится направление вращения электрического двигателя, то двигатель перейдет в режим торможения противовключением, который называется силовой спуск.
Если мы поменяем полярность, то будет реверс.
Механическая характеристика имеет такой же вид, как и электромеханическая, но в другом масштабе.
Похожие записи:
- Схема включения и статические характеристики двигателей постоянного тока с независимым возбуждением, работающих в электроприводах
- Регулировочные характеристики двигателей постоянного тока с независимым и параллельным возбуждениями
- Рабочие характеристики двигателей постоянного тока
- Электромеханическая характеристика двигателя постоянного тока с последовательным возбуждением