Механические характеристики асинхронного двигателя
Механические характеристики асинхронного двигателя — зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу).
Электромагнитный момент М, развиваемый асинхронным двигателем, можно определять двумя способами: через электромагнитную мощность Рэм и через полную механическую мощность двигателя Р2:
где Р2 —полная механическая мощность, Вт; ω=2πn/60 — механическая угловая скорость вращения ротора, 1/с; n — частота вращения ротора, об/мин.
Скорость ω связана с синхронной ω1 соотношением
Подставляя выражение для ω и Р2‘ по уравнению (36) в уравнение (39), получаем
Выражение для момента через электромагнитную мощность имеет вид
Значение Рэм находится по уравнению (35), после чего представляем
Таким образом мы получим тождественное выражение для момента. Поскольку независимой величиной является не ток, а приложенное напряжение, то для получения окончательного выражения момента подставим в (40) значение тока I2‘ по уравнению (32):
где М — момент, Н∙м; ω1 — синхронная скорость, с-1; U1 — напряжение, В; r1, r2‘, x1, x2‘ —сопротивления, Ом; s — скольжение, отн. ед.
Если необходимо иметь значение момента во внесистемных единицах — в килограммах силы-метрах, то полученный по (41) результат следует разделить на 9,81.
При эксплуатации часто необходимо определять момент по известной механической мощности Р2 (кВт) и частоте вращения n (об/мин). В этом случае формула (39) имеет вид, Н/м,
Отсюда мощность Р2 связана с моментом и частотой вращения соотношением
где М — момент, Н∙м; n — частота вращения, об/мин.
Если момент выражен в килограммах силы-метрах, то формулы (42), (43) преобразуются к виду
Зависимость между моментом и скольжением (41) при постоянном напряжении U1 и частоте f1 сети называется механической характеристикой. Естественная механическая характеристика асинхронного двигателя приведена на рис. 20. Там же приведена механическая характеристика M=f (n), часто встречающаяся на практике и полученная из характеристики M = φ(s) пересчетом (s=0 соответствует синхронной частоте вращения n1, s =1-n=0 и т. д.).
Рис. 20. Естественная механическая характеристика асинхронного двигателя: a —M=f(s); б – n =f(М); А—генераторный режим; Б — режим двигателя; В — режим электромагнитного тормоза
Используя формулу (41), можно получить достаточно полное представление о механических характеристиках асинхронного двигателя . Обратим прежде всего внимание на то, что механический момент двигателя зависит от трех групп величин: во-первых, это величины, определяемые конструкцией двигателя, к их числу относятся r1 и r’2, x1, х’2; во-вторых, величины, характеризующие напряжение, подводимое к двигателю, — напряжение на его зажимах U и частота питающего напряжения f (так как ω1 = 2πf); наконец, последняя величина, определяющая момент, развиваемый двигателем, зависит от режима его работы — это скольжение s.
Рассмотрим физические явления, обусловливающие такую форму механической характеристики. При частоте вращения ротора, равной синхронной, проводники ротора движутся с той же скоростью, что и вращающееся магнитное поле. Поэтому ЭДС, а следовательно, и ток в роторе равны нулю. Поэтому равен нулю и вращающий момент двигателя. При уменьшении частоты вращения ротора ниже синхронной проводники обмотки ротора начинают пересекать магнитное поле машины, в результате чего в обмотке ротора наводится ЭДС, пропорциональная скольжению ротора [см. формулу (14)]. При малых скольжениях (в пределах от s=0 до s=sкр) ток ротора также изменяется почти пропорционально скольжению. К такому выводу можно прийти, рассматривая уравнение (25) или (32). Так, в уравнении (25) при малых значениях s можно пренебречь составляющей sx2 в знаменателе по сравнению со значением r2, а в (32) можно пренебречь всеми составляющими в знаменателе по сравнению со значением r’2/s.
Таким образом, ток ротора в этом диапазоне скольжений практически определяется величиной ЭДС ротора, деленной на постоянное активное сопротивление r2 [уравнение (25)].
Как видно из рис. 20, механическая характеристика в зоне малых скольжений sкр линейна. В этой же области скольжений находится и номинальное скольжение sном=0,01—0,1 (большие значения номинального скольжения относятся к двигателям мощностью до 1 кВт).
По мере увеличения скольжения увеличивается частота токов в роторе и возрастает влияние на характеристику индуктивного сопротивления ротора. Изменение тока, определяемое в зоне малых скольжений в основном активным сопротивлением [см. формулу (25)], замедляется, и при некотором скольжении, называемом критическим sкр, достигается максимальное значение момента. При дальнейшем увеличении скольжения (уменьшении частоты вращения ротора) момент будет уменьшаться.
Критическое скольжение находится по формуле
где знак плюс соответствует двигательному режиму работы, а минус — генераторному (как следует из рис. 20, генераторный режим соответствует области отрицательных скольжений).
Поскольку для двигателей мощностью более 1 кВт практически всегда r1<<(х1 + х’2), то формулу для критического скольжения можно упростить:
Теперь, подставляя значение s=sкр в формулу (41), получим выражение для максимального момента
Взяв теперь отношение текущего значения момента к максимальному М/Мmax при условии r1≈0, получим
Формула (46) оказывается весьма удобной, так как позволяет построить механическую характеристику двигателя M=f(s) при известных значениях максимального момента и соответствующего ему критического скольжения. Задавая текущее значение скольжения в диапазоне 0max=f (s).
Относительный максимальный момент определяет его перегрузочную способность, т. е. способность двигателя кратковременно выдерживать нагрузки, большие номинальной. В электрических машинах перегрузочная способность обозначает kм и определяется как
Важное значение имеет пусковой момент, который можно рассчитывать по общей формуле (41) при подстановке в нее s= 1:
Относительное значение пускового момента kп определяет способность двигателя разгоняться до рабочей частоты вращения с полной нагрузкой на валу и определяется как
В ряде случаев вместо (46) удобнее пользоваться формулой, в которой текущий момент двигателя отнесен не к максимальному, а к номинальному моменту. В этом случае
где sкр, sном — значения критического и номинального скольжения двигателя; ρ=r1/r’2 (для двигателей серии 4А с высотой оси вращения 56—132 мм пользуются значением ρ≈1,32).
Если пренебречь величиной r1 (т. е. положить ρ=0), то из (49) следует
Анализ выражения (41) для электромагнитного момента показывает, чт момент зависит от квадрата напряжения сети, что является недостатком асинхронных двигателей. Так, при снижении напряжения на 10 % момент уменьшается на 19%, а при снижении напряжения на 20 % уменьшение момента составляет 36%. На рис. 21 изображены механические характеристики двигателя при номинальном питающем напряжении (естественная характеристика) и при пониженном напряжении.
При уменьшении напряжения, питающего двигатель, который работает под нагрузкой, его вращающий момент снижается. В результате этого происходит снижение частоты вращения двигателя. Частота снижается (и соответственно увеличивается скольжение) до тех пор, пока вращающий момент двигателя не станет равным статическому моменту сопротивления Мс, обусловленному (приводом (соответствующие частоты вращения показаны точками на механических характеристиках рис. 21). При сильном уменьшении напряжения может случиться, что максимальный момент окажется меньше момента сопротивления Мс. В этом случае двигатель опрокидывается, т. е. его частота вращения уменьшается и в конце концов он останавливается. При заторможенном роторе по обмоткам двигателя протекают большие токи, и во избежание аварии сам двигатель должен быть отключен от сети (эти функции выполняет тепловая защита).
Рис. 21. Механические характеристики асинхронного двигателя при различных значениях питающего напряжения
Скольжение асинхронного двигателя
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n 1 — n 2 ) / n 1, где n 1 — синхронная скорость вращения поля, об/мин, n2 — скорость вращения ротора асинхронного двигателя, об/мин. При работе с номинальной нагрузкой скольжение обычно мало, так для электродвигателя, например, с n 1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно: s = ((1500 — 1460) / 1500) х 100 = 2,7%

Асинхронный двигатель не может достичь синхронной скорости вращения даже три отсоединенном механизме, так как при ней проводники ротора не будут пересекаться магнитным полем, в них не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
В начальный момент пуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя : f2 = s х f1, где f1 — частота тока, подводимого к статору.
Сопротивление ротора зависит от частоты тока в нем, причем чем больше частота, тем больше его индуктивное сопротивление. С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
При пуске асинхронных двигателей коэффициент мощности поэтому значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 — 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до s н ом в 5-7 раз по отношению к начальному значению при пуске.
Ток по величине изменяется обратно пропорционально изменению эквивалентного сопротивления Таким образом, при пуске до скольжения порядка 0,15 ток опадает незначительно, а в дальнейшем быстро уменьшается.
Момент вращения электродвигателя определяется величиной магнитного потока, током и угловым сдвигом между ЭДС и током в роторе. Каждая из этих величин в свою очередь зависит от скольжения, поэтому для исследования рабочих характеристик асинхронных двигателей устанавливается зависимость момента от скольжения и влияния на него подводимого напряжения и частоты.
Момент вращения может быть также определен по электромагнитной мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и обратно пропорциональная квадрату частоты.

Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
З начения момента для номинального напряжения приводятся в каталогах для электрических машин. Знание минимального момента необходимо при расчете допустимости пуска или самозапуска механизма с полной нагрузкой механизма. Поэтому его значение для конкретных расчетов должно быть либо определено, либо получено от завода-поставщика.
Величина максимального значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не зависит от величины сопротивления ротора.
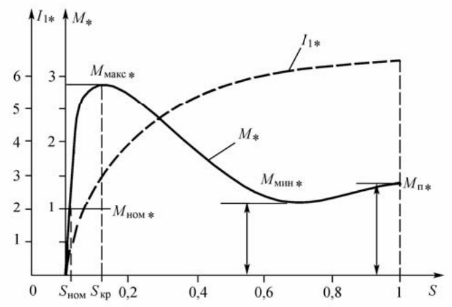
Зависимость тока и момента от скольжения
Критическое скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обусловлено активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Увеличение только активного сопротивления ротора сопровождается увеличением критического скольжения и перемещением максимума момента в область более высоких скольжений (меньшей скорости вращения). Таким путем может быть достигнуто изменение характеристик моментов.
Изменение скольжения возможно увеличением сопротивления цени ротора или потока. Первый вариант осуществим только для асинхронных двигателей с фазным ротором (от S = 1 до S = Sном ) , но не экономичен. Второй вариант осуществим при изменении питающего напряжения, но только в сторону уменьшения. Диапазон регулирования мал, так как S возрастает, но одновременно уменьшается перегрузочная способность асинхронного двигателя. По экономичности оба варианта, примерно, равноценны.
В асинхронных двига т елях с фазным ротором изменение момента при различных скольжениях осуществляется с помощью сопротивления, вводимого в цепь обмотки ротора. В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто за счет применения двигателей с переменными параметрами или с помощью частотных преобразователей .
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Как определить скольжение асинхронного двигателя в процессе наладки и эксплуатации
Если частота вращения электродвигателя значительно отличается от синхронной, ее измеряют тахометром или тахогенератором, который присоединяется непосредственно на валу электродвигателя, а скольжение двигателя определяют по формуле S = (n1 — n2) / n1 , где n1 = 60f /p – синхронная частота вращения; n2 – фактическая частота вращения.
Преимущества этого способа определения скольжения электродвигателя: быстрота измерений и возможность производить их как при неизменной, так и при изменяющейся частоте вращения. К недостаткам такого способа измерения можно отнести невысокую точность обычных тахометров (погрешность 1–8 %) и трудность их градуирования. Кроме того, тахометр не может применяться при испытании электродвигателей малой мощности, так как потери на трение внутри механизма тахометра представляют заметную нагрузку.
Для выполнения различных измерений ручной тахометр обычно снабжается комплектом сменных наконечников различной формы и назначения, надеваемых на конец валика (рис. 1). Из этих наконечников наиболее широко применяется резиновый конус, оправленный в металлический патрон. Все эти наконечники служат для соприкосновения с коническим углублением в торце вала электрической машины. Наконечник с резиновым центром используют при измерении больших частот, со стальным — для малых и средних.
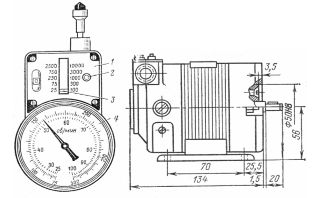
Рис. 1. Общий вид центробежного тахометра типа ИО-10 и тахогенератора: 1 – шкала; 2 – кнопка переключения; 3 – указатель пределов; 4 – циферблат
При наличии углубления по центру вала применяется удлинитель, который надевается на вал тахометра, а соответствующий наконечник – на удлинитель. При отсутствии или недостаточности центров пользуются шкивом, который прижимается боковой поверхностью (резиновым кольцом) к поверхности вращающегося вала.
В соответствии с конкретными условиями измерения выбирают приспособление (удлинитель наконечник). Перед началом измерения удаляют смазку, грязь, пыль из центра углубления или поверхности вала.
Для измерения частоты вращения электродвигателя следует предварительно установить на тахометре необходимый предел измерения. Если порядок измерения частоты неизвестен, то измерение следует начинать с самого высокого предела во избежание порчи тахометра.
Измерение следует производить кратковременно (3 – 5 с), осторожно прижимая наконечник тахометра к вращающемуся валу с небольшим нажимом так, чтобы ось вала тахометра совпадала с осью измеряемого вала или при пользовании шкивом была параллельной ей.

Если скольжение не превышает 5 %, частота вращения может быть измерена стробоскопическим методом с применением неоновой лампы.
На торце вала двигателя мелом наносят диаметральную черту. Во время работы двигателя ее освещают неоновой лампой, питаемой от сети той же частоты, что и двигатель. Наблюдатель видит на торце вала не черту, а звезду, медленно вращающуюся против направления вращения вала. Количество лучей звезды зависит от числа пар полюсов двигателя и от положения неоновой лампы. Если свет от обоих электродов лампы падает на торец вала, число лучей кажущейся звезды равно 2р. Если же торец вала с нанесенной меловой чертой освещается только одним электродом, число лучей кажущейся звезды равно числу пар полюсов.
За время t (обычно 30 с), измеряемое секундомером, подсчитывается количество лучей кажущейся звезды m, прошедших через вертикальное положение. Поскольку число лучей кажущейся звезды равно 2р, скольжение
где f1 – частота сети, питающей неоновую лампу.
Другой вариант стробоскопического метода заключается в следующем. На валу двигателя с торцовой стороны укрепляют один из дисков (рис. 2 ). Собирают схему (рис. 3 ). У двухполюсной машины на валу закрепляют диск, обозначенный как 2р = 2, и освещают его неоновой лампой с пятачковым электродом.

Рис. 2 . Изображение стробоскопических дисков в зависимости от количества пар полюсов асинхронного электродвигателя
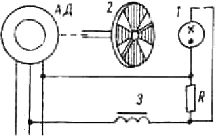
Рис. 3 . Схема включения неоновой лампы для стробоскопического метода определения скольжения:1 – неоновая лампа, 2 – стробоскопический диск, 3 – индукционная катушка
Ротор вращается несинхронно и отстает от поля, так что виден диск, медленно вращающийся в сторону, противоположную вращению ротора. Если за время t мимо неподвижной точки (стрелки, укрепленной на подшипнике) проходит m черных секторов, значение скольжения определяется по выражению
Счет проходящих мимо неподвижной точки секторов следует начинать не с момента пуска секундомера, а со следующего прохождения метки.
Для получения резкости изображения на лампу следует подавать напряжение, кривая изменения которого показана на рис. 4 . Лампа зажигается в тот момент, когда напряжение на ее зажимах достигает значения, называемого порогом зажигания.
Рис. 4 . Схема включение неоновой лампы для получения острой формы кривой напряжения: 1 – неоновая лампа; 2 – реактивная катушка с сильно насыщенным магнитопроводом с индуктивным сопротивлением Х (падения напряжения на сопротивлениях R и Х примерно одинаковы)
Определение скольжения двигателя с помощью индукционной катушки. Этот метод основан на контроле частоты вращения потоков рассеивания ротора Фр (рис. 5 ), которые с частотой, пропорциональной скольжению, пересекают витки индукционной катушки.
Рис. 5. Схема измерения скольжения ротора асинхронного электродвигателя с помощью индукционной катушки
К выводам катушки подключают чувствительный милливольтметр (желательно с нулем посредине шкалы); катушку располагают у конца вала ротора. Поворачивая катушку в разные стороны, находят положение, при котором наблюдаются максимальные колебания стрелки прибора. По числу полных колебаний k за время t рассчитывают значение скольжения
Для расчета удобно отсчитать 50 полных колебаний и по секундомеру отметить время. Тогда: .
В качестве индукционной катушки можно использовать катушку реле или контактора постоянного тока, имеющую 10–20 тыс. витков (или намотать катушку с числом витков не менее 3000). Для усиления магнитного потока в катушку вставляют сердечник, набираемый из нескольких полос трансформаторной стали. Метод индукционной катушки весьма прост и пригоден для всех видов машин.
У асинхронных электродвигателей с фазным ротором помимо описанных выше способов скольжение может быть определено с помощью магнитоэлектрического амперметра, включаемого в одну из фаз ротора, а при наличии невыключаемого сопротивления в цепи ротора — с помощью вольтметра, присоединенного к кольцам ротора. Рекомендуется применять приборы с двусторонней шкалой. Скольжение асинхронного электродвигателя рассчитывается по числу полных колебаний стрелки прибора, так же как при использовании метода с индукционной катушкой.

Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
12. Электрические машины переменного тока
12.2. Асинхронные двигатели.
Конструкция, принцип действия
Асинхронный двигатель имеет неподвижную часть, именуемую статором , и вращающуюся часть, называемую ротором . В статоре размещена обмотка, создающая вращающееся магнитное поле.
Различают асинхронные двигатели с короткозамкнутым и фазным ротором.
В пазах ротора с короткозамкнутой обмоткой размещены алюминиевые или медные стержни. По торцам стержни замкнуты алюминиевыми или медными кольцами. Статор и ротор набирают из листов электротехнической стали, чтобы уменьшить потери на вихревые токи.
Фазный ротор имеет трехфазную обмотку (для трехфазного двигателя). Концы фаз соединены в общий узел, а начала выведены к трем контактным кольцам, размещенным на валу. На кольца накладывают неподвижные контактные щетки. К щеткам подключают пусковой реостат. После пуска двигателя сопротивление пускового реостата плавно уменьшают до нуля.
Принцип действия асинхронного двигателя рассмотрим на модели, представленной на рисунке 12.4.
Пользуясь правилом левой руки, найдем направление электромагнитных сил, действующих на ротор и заставляющих его вращаться. Ротор двигателя будет вращаться с частотой вращения n2 в направлении вращения поля статора.
Ротор вращается асинхронно т.е частота вращения его n2 меньше частоты вращения поля статора n1.
Относительная разность скоростей поля статора и ротора называется скольжением.
Скольжение не может быть равным нулю, так как при одинаковых скоростях поля и ротора прекратилось бы наведение токов в роторе и, следовательно, отсутствовал бы электромагнитный вращающий момент.
Вращающий электромагнитный момент уравновешивается противодействующим тормозным моментом Мэм = М2.
С увеличением нагрузки на валу двигателя тормозной момент становится больше вращающего, и скольжение увеличивается. Вследствие этого, возрастают индуктированные в роторной обмотке ЭДС и токи. Вращающий момент увеличивается и становится равным тормозному моменту. Вращающий момент может возрастать с увеличением скольжения до определенного максимального значения, после чего при дальнейшем увеличении тормозного момента вращающий момент резко уменьшается, и двигатель останавливается.
Скольжение заторможенного двигателя равно единице. Говорят, что двигатель работает в режиме короткого замыкания.
Частота вращения ненагруженного асинхронного двигателя n2 приблизительно равна синхронной частоте n1. Скольжение ненагруженного двигателя S &asimp; 0. Говорят, что двигатель работает в режиме холостого хода.
Скольжение асинхронной машины, работающей в режиме двигателя, изменяется от нуля до единицы.
Асинхронная машина может работать в режиме генератора. Для этого ее ротор необходимо вращать сторонним двигателем в направлении вращения магнитного поля статора с частотой n2 > n1. Скольжение асинхронного генератора .
Асинхронная машина может работать в режиме электромашинного тормоза. Для этого необходимо ее ротор вращать в направлении, противоположном направлению вращения магнитного поля статора.
В этом режиме S > 1. Как правило, асинхронные машины используются в режиме двигателя. Асинхронный двигатель является наиболее распространенным в промышленности типом двигателя. Частота вращения поля в асинхронном двигателе жестко связана с частотой сети f1 и числом пар полюсов статора. При частоте f1 = 50 Гц существует следующий ряд частот вращения.
| P | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| n1, об/мин | 3 000 | 1500 | 1000 | 750 |
Из формулы (12.1) получим
Скорость поля статора относительно ротора называется скоростью скольжения
Частота тока и ЭДС в роторной обмотке
Асинхронная машина с заторможенным ротором работает как трансформатор. Основной магнитный поток индуктирует в статорной и в неподвижной роторной обмотках ЭДС Е1 и Е2к.
где Фm — максимальное значение основного магнитного потока, сцепленного со
статорной и роторной обмотками;
W1 и W2 — числа витков статорной и роторной обмоток;
f1 — частота напряжения в сети;
K01 и K02 — обмоточные коэффициенты статорной и роторной обмоток.
Чтобы получить более благоприятное распределение магнитной индукции в воздушном зазоре между статором и ротором, статорные и роторные обмотки не сосредоточивают в пределах одного полюса, а распределяют по окружностям статора и ротора. ЭДС распределенной обмотки меньше ЭДС сосредоточенной обмотки. Этот факт учитывается введением в формулы, определяющие величины электродвижущих сил обмоток, обмоточных коэффициентов. Величины обмоточных коэффициентов несколько меньше единицы.
ЭДС в обмотке вращающегося ротора
Ток ротора работающей машины
где R2 — активное сопротивление роторной обмотки;
х2 — индуктивное сопротивление роторной обмотки.
где х2к— индуктивное сопротивление заторможенного ротора.
12.3. Вращающий момент асинхронного двигателя
На ротор и полюсы статора действуют электромагнитные вращающие
моменты, одинаковые по величине и направленные в противоположные стороны.
Мощность, необходимая для вращения статорных полюсов с синхронной частотой,
где — угловая скорость.
Механическая мощность, развиваемая ротором,
где — угловая скорость ротора.
где РЭ2 — электрические потери в роторной обмотке;
m2 — число фаз обмотки ротора;
R2 — активное сопротивление обмотки ротора;
I2 — ток ротора.
Вращающий момент, с учетом (12.6),
где , КТ — коэффициент трансформации двигателя с заторможенным ротором.
где U1 — напряжение сети.
На рис. 12.5 изображена зависимость электромагнитного момента от скольжения в виде сплошной линии.
Пусть исполнительный механизм, приводимый во вращение данным двигателем, создает противодействующий тормозной момент М2.
На рис.12.5 имеются две точки, для которых справедливо равенство Мэм = М2 ;
это точки а и в .
В точке а двигатель работает устойчиво. Если двигатель под влиянием какой-либо причины уменьшит частоту вращения, то скольжение его возрастет, вместе с ним возрастет вращающий момент. Благодаря этому частота вращения двигателя повысится, и вновь восстановится равновесие Мэм = М2 ;.
В точке в работа двигателя не может быть устойчива: случайное отклонение частоты вращения приведет либо к остановке двигателя, либо к переходу его в точку а .
Следовательно, вся восходящая ветвь характеристики является областью устойчивой работы двигателя, а вся нисходящая часть — областью неустойчивой работы. Точка б , соответствующая максимальному моменту, разделяет области устойчивой и неустойчивой работы.
Максимальному значению вращающего момента соответствует критическое скольжение Sk . Скольжению S = 1 соответствует пусковой момент. Если величина противодействующего тормозного момента М2 больше пускового МП, двигатель при включении не запустится, останется неподвижным.
Максимальный момент найдем следующим образом. Сначала определим значение критического скольжения, при котором функция Мэм будет максимальной. Для этого первую производную функции по скольжению S от выражения (12.8) приравняем нулю.
Подставив значение критического скольжения в формулу (12.8), получим
Из формул (12.8), (12.9), (12.10) видно:
- величина максимального вращающего момента не зависит от активного сопротивления цепи ротора;
- с увеличением активного сопротивления цепи ротора максимальный вращающий момент, не изменяясь по величине, смещается в область больших скольжений (см. кривая 1 рис. 12,5);
- вращающий момент пропорционален квадрату напряжения сети.
Механической характеристикой асинхронного двигателя называется зависимость частоты вращения двигателя от момента на валу n2 = f (M2). Механическую характеристику получают при условии U1 — const, f1 — const. Механическая характеристика двигателя является зависимостью вращающего момента от скольжения, построенной в другом масштабе. На рис. 12.6 изображена типичная механическая характеристика асинхронного двигателя.
Результирующий, или основной, магнитный поток в воздушном зазоре машины в пусковом режиме, а также ЭДС в статоре и роторе Е1 и Е2 значительно уменьшаются. Это приводит к уменьшению пускового момента двигателя и к резкому возрастанию пускового тока.
12.4. Регулирование частоты вращения асинхронных двигателей.
Реверсирование асинхронного двигателя
Из формулы (12.2) получим
Из формулы (12.11) видно, что частоту вращения асинхронного двигателя можно менять тремя способами:
- изменением частоты питающего напряжения;
- изменением числа полюсов двигателя. Для этого в пазы статора закладывают обмотку, которую можно переключать на различное число полюсов;
- изменением скольжения. Этот способ можно применить в асинхронных двигателях с фазным ротором. Для этого в цепь ротора включают регулировочный реостат. Увеличение активного сопротивления цепи ротора приводит к увеличению скольжения от Sa к Sг (см. рис. 12.5), а, следовательно, и к уменьшению частоты вращения двигателя.
Асинхронные двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения.
Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
12.5. Однофазные асинхронные двигатели
Однофазный двигатель имеет одну обмотку, расположенную на статоре. Однофазная обмотка, питаемая переменным током, создаст пульсирующее магнитное поле. Поместим в это поле ротор с короткозамкнутой обмоткой. Ротор вращаться не будет. Если раскрутить ротор сторонней механической силой в любую сторону, двигатель будет устойчиво работать.
Объяснить это можно следующим образом.
Пульсирующее магнитное поле можно заменить двумя магнитными полями,
вращающимися в противоположных направлениях с синхронной частотой n1 и имеющими амплитуды магнитных потоков, равные половине амплитуды магнитного потока пульсирующего поля. Одно из магнитных полей называется прямовращающимся, другое — обратновращающимся. Каждое из магнитных полей индуктирует в роторной обмотке вихревые токи. При взаимодействии вихревых токов с магнитными полями образуются вращающие моменты, направленные встречно друг другу.
На рис. 12.7 изображены зависимости момента от прямого поля М’, момента от
обратного поля М» и результирующего момента М в функции скольжения М = М’ — M».
Оси скольжений направлены встречно друг другу.
В пусковом режиме на ротор действуют вращающие моменты, одинаковые по величине и противоположные по направлению.
Раскрутим ротор сторонней силой в направлении прямовращающегося магнитного поля. Появится избыточный (результирующий) вращающий момент, разгоняющий ротор до скорости, близкой к синхронной. При этом скольжение двигателя относительно прямовращающегося магнитного поля
Скольжение двигателя относительно обратновращающегося магнитного поля
Рассматривая результирующую характеристику, можно сделать следующие выводы:
1. Однофазный двигатель не имеет пускового момента. Он будет вращаться в ту сторону, в которую раскручен внешней силой.
2. Из-за тормозного действия обратновращающегося поля характеристики однофазного двигателя хуже, чем трехфазного.
Для создания пускового момента однофазные двигатели снабжают пусковой обмоткой, пространственно смещенной относительно основной, рабочей обмотки на 90 o . Пусковая обмотка подключается к сети через фазосдвигающие элементы: конденсатор или активное сопротивление.
В схеме на рис. 12.9а статорные обмотки соединены звездой.
В схеме на рис. 12.9б статорные обмотки соединены треугольником. Величина емкости С ≈ 60 мкф на 1 кВт мощности.