Что не относится к параметрам слоя

Выбрать курс

Выбрать курс
- Главная
- Слои и свойства
- Слои и свойства
© Учебный центр МЕРКУЛОВ.А, 2024 г
Все права защищены. Использование материалов данного сайта разрешено только с согласия правообладателей.
Тест по дисциплине Компьютерная графика (AutoCAD)

7. Какие из нижеперечисленных значений координат не содержит AutoCad:
а) Полярные; б) Плоские прямоугольные;
в) Относительные; г) Абсолютные
8. С помощью какой из перечисленных команд можно объединить несколько линий или дуг в одну полилинию?
a) Расчленить (Explode);
б) Замкнуть (Close);
в) Редактировать полилинию (Edit Polyline);
г) Полилиния (Polyline);
9. С помощью какой команды можно начертить скругленный угол?
a) Фаска (Chamfer);
б) Обрезать (Trim);
с) Сопряжение (Fillet);
д) Редактировать полилинию (Edit Polyline);
е) Смещение (Offset)
10. Что такое геометрический примитив:
а) Элемент чертежа, обрабатываемый системой как совокупность точек и объектов, а не
как единое целое;
б) Свойство геометрического атрибута;
в) Элемент чертежа, обрабатываемый системой как целое, а не как совокупность точек и
г) Элемент графического интерфейса AutoCad
11. Выберите вариант, соответствующий правильному порядку работы с
инструментом Обрезка:
а) выделить линии, подлежащие обрезке;
б) выделить линии, являющиеся границами;
обрезки, затем линии, подлежащие обрезке;
в) выделить линии, подлежащие обрезке, затем линии, являющиеся границами
12.Название команды :
а) Фаска; б) Стирание; в) Подрезание; г) Копирование
13. Для создания выреза у объекта используется команда:
а) Объединение; б) Вычитание; в) Пересечение; г) Выдавить
14. Название команды :
а) Линейный размер; б) Размер от общей базы;
в)Параллельный размер г)Размерная цепь
15. Название команды:
а)Зеркальное копирование; б)Фаска; в) Масштабирование; г)Подрезание

16. Пиктограмма отвечает за привязку …
A) к точке на линии, окружности, которая образует совместно с последней точкой нормаль к объекту;
Б) к ближайшей конечной точке линии или дуги;
В) к конечному элементу;
Г) к центру дуги, окружности или эллипса;
Д) к точке на окружности или дуге, которая при соединении с последней точкой образует касательную
- С каким расширение AutoCAD сохраняет созданные чертежи?
а) .jpg ; б) .dwt; в) . dwf; г) .dwg ;
- Для построения, какого примитива используется сокращение ККР?
а) многоугольник; б) круг (окружность); в) отрезок . 3. Какая кнопка на «строке состояния» включает/выключает режимортогональности? а) ОТС-ОБЪЕКТ; б) ДИН; в) ОРТО 4. Как называется размер, представляющий собой последовательность связанных друг с другом размеров. а) размерная цепь; б) параллельный размер; в) быстрый 5. Для обозначения диаметра необходимо ввести… а) %%d; б) %%p; в) %%c; г) %%r 6. Что не относится к параметрамСлоя а)Цвет линий; б)Координаты объектов слоя; в)Имя; г)Толщина линий 7. Окно, куда вводят команды, и где отображаются подсказки, называют: а) строкой меню; б) командной строкой; в) панелью свойств; г) строкой состояния. 8. С помощью какой из перечисленных команд можно разбить цельную полилинию на отдельные отрезки? a) Точка (Point); б). Обрезать (Trim); с) Смещение (Offset); д) Расчленить (Explode); е). Массив (Array) 9. С помощью какой команды можно начертить скошенный угол? a) Смещение (Offset); б) Сопряжение (Fillet); с) Обрезать (Trim); д) Редактировать полилинию (Edit Polyline); е) Фаска (Chamfer) 10. Программа AutoCAD отображает текущий слой: а) «Галочкой зеленого цвета»; б) «Горящей лампочкой»; в) «Открытым замком»; г) название текущего слоя отображается на панели Слои. 11. Выберите вариант, соответствующий правильному порядку работы синструментом Сопряжение: а) выбрать инструмент, указать сопрягаемые линии; б) выбрать инструмент, ввести значение радиуса сопряжения, указать сопрягаемые линии; в) выбрать инструмент, в командной строке, выбрать команду рад и задать значение радиуса, указать сопрягаемые линии; г) выбрать инструмент, указать сопрягаемые линии, в командной строке выбрать команду рад и задать значение радиуса.
12. Название команды :а) Подрезание; б)- Копирование; в) Фаска; г) Масштабирование
13. Для создания единого объекта из нескольких составляющих егоэлементов используется команда: а) Объединение; в) Пересечение; б) Вычитание; г) Выдавить
14. Команда, с помощью которой выполняется преобразованиедвухмерного объекта в трехмерный: а) Объединение; б) Вычитание; в) Пересечение; г) Выдавить.
15 Название команды : а) Подрезание; б) Копирование; в) Массив; г) Масштабирование 
16. Пиктограмма отвечает за привязку … A. к точке на окружности или дуге, которая при соединении с последней точкой образует касательную Б) к центру дуги, окружности или эллипса В). к конечному элементу Г) к ближайшей конечной точке линии или дуги Д) к точке на линии, окружности, которая образует совместно с последней точкой нормаль к объекту
Autocad решить тест.
Вопрос 12
Какую клавишу надо нажать после набора команды, которая является указателем начала обработки команды
⦁ Delete
⦁ Tab
⦁ End
⦁ Enter
⦁ Esc
Вопрос 12
Строка, в которой в основном происходит диалог пользователя с системой
⦁ строка заголовка
⦁ ниспадающее меню
⦁ строка командной панели инструментов
⦁ командная строка
⦁ строка режимов
Вопрос 13
Что не относится к параметрам Слоя
а)Цвет линий;
б)Координаты объектов слоя;
в)Имя;
г)Толщина линий
Вопрос 14
С помощью какой из перечисленных команд можно разбить цельную полилинию на отдельные отрезки?
a) Точка (Point);
б). Обрезать (Trim);
с) Смещение (Offset);
д) Расчленить (Explode);
е). Массив (Array)
Вопрос 15
Дать определение:
Полилиния – это …
Вопрос 16
Какие из нижеперечисленных значений координат не содержит AutoCad:
а) Полярные; б) Плоские прямоугольные;
в) Относительные; г) Абсолютные
Вопрос 17
Окно, куда вводят команды, и где отображаются подсказки, называют:
а) строкой меню; б) командной строкой;
в) панелью свойств; г) строкой подсказки.
Вопрос 18
Единица измерения в AutoCAD:
⦁ Мм
⦁ См
⦁ Дм
⦁ Км
Сверточные нейронные сети
Сверточная нейронная сеть (англ. convolutional neural network, CNN) — специальная архитектура нейронных сетей, предложенная Яном Лекуном [1] , изначально нацеленная на эффективное распознавание изображений.
Свертка
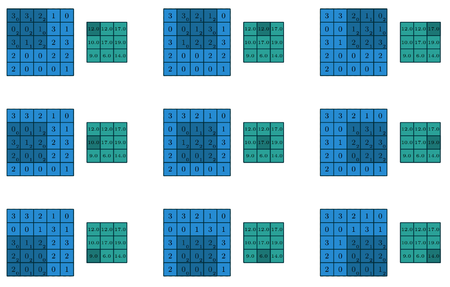
Рисунок 1.Пример свертки двух матриц размера 5×5 и 3×3
Свертка (англ. convolution) — операция над парой матриц [math]A[/math] (размера [math]n_x\times n_y[/math] ) и [math]B[/math] (размера [math]m_x \times m_y[/math] ), результатом которой является матрица [math]C = A * B[/math] размера [math](n_x-m_x+1)\times (n_y-m_y+1)[/math] . Каждый элемент результата вычисляется как скалярное произведение матрицы [math]B[/math] и некоторой подматрицы [math]A[/math] такого же размера (подматрица определяется положением элемента в результате). То есть, [math]C_ = \sum_^\sum_^A_B_[/math] . На Рисунке 1 можно видеть, как матрица [math]B[/math] «двигается» по матрице [math]A[/math] , и в каждом положении считается скалярное произведение матрицы [math]B[/math] и той части матрицы [math]A[/math] , на которую она сейчас наложена. Получившееся число записывается в соответствующий элемент результата.
Логический смысл свертки такой — чем больше величина элемента свертки, тем больше эта часть матрицы [math]A[/math] была похожа на матрицу [math]B[/math] (похожа в смысле скалярного произведения). Поэтому матрицу [math]A[/math] называют изображением, а матрицу [math]B[/math] — фильтром или образцом.
Структура сверточной нейронной сети
В сверточной нейронной сети выходы промежуточных слоев образуют матрицу (изображение) или набор матриц (несколько слоёв изображения). Так, например, на вход сверточной нейронной сети можно подавать три слоя изображения (R-, G-, B-каналы изображения). Основными видами слоев в сверточной нейронной сети являются сверточные слои (англ. convolutional layer), пулинговые слои (англ. pooling layer) и полносвязные слои (англ. fully-connected layer).
Сверточный слой
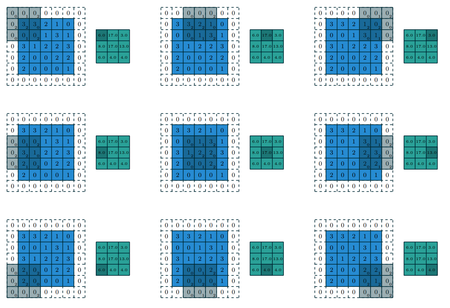
Рисунок 2.Пример свертки двух матриц с дополнением нулями и сдвигом 2
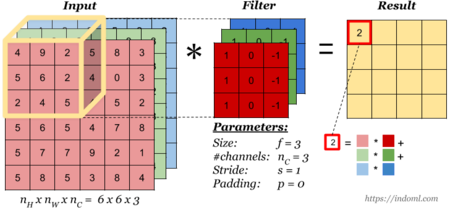
Рисунок 3.Пример свертки с трехмерным ядром
Сверточный слой нейронной сети представляет из себя применение операции свертки к выходам с предыдущего слоя, где веса ядра свертки являются обучаемыми параметрами. Еще один обучаемый вес используется в качестве константного сдвига (англ. bias). При этом есть несколько важных деталей:
- В одном сверточном слое может быть несколько сверток. В этом случае для каждой свертки на выходе получится своё изображение. Например, если вход имел размерность [math]w\times h[/math] , а в слое было [math]n[/math] сверток с ядром размерности [math]k_x\times k_y[/math] , то выход будет иметь размерность [math]n\times(w — k_x + 1)\times(h — k_y + 1)[/math] ;
- Ядра свертки могут быть трёхмерными. Свертка трехмерного входа с трехмерным ядром происходит аналогично, просто скалярное произведение считается еще и по всем слоям изображения. Например, для усреднения информации о цветах исходного изображения, на первом слое можно использовать свертку размерности [math]3\times w \times h[/math] . На выходе такого слоя будет уже одно изображение (вместо трёх);
- Можно заметить, что применение операции свертки уменьшает изображение. Также пиксели, которые находятся на границе изображения участвуют в меньшем количестве сверток, чем внутренние. В связи с этим в сверточных слоях используется дополнение изображения (англ. padding). Выходы с предыдущего слоя дополняются пикселями так, чтобы после свертки сохранился размер изображения. Такие свертки называют одинаковыми (англ. same convolution), а свертки без дополнения изображения называются правильными (англ. valid convolution). Среди способов, которыми можно заполнить новые пиксели, можно выделить следующие:
- zero shift: 00[ABC]00 ;
- border extension: AA[ABC]CC ;
- mirror shift: BA[ABC]CB ;
- cyclic shift: BC[ABC]AB .
- Еще одним параметром сверточного слоя является сдвиг (англ. stride). Хоть обычно свертка применяется подряд для каждого пикселя, иногда используется сдвиг, отличный от единицы — скалярное произведение считается не со всеми возможными положениями ядра, а только с положениями, кратными некоторому сдвигу [math]s[/math] . Тогда, если если вход имел размерность [math]w\times h[/math] , а ядро свертки имело размерность [math]k_x\times k_y[/math] и использовался сдвиг [math]s[/math] , то выход будет иметь размерность [math]\lfloor\frac+ 1\rfloor\times\lfloor\frac+ 1\rfloor[/math] .
Пулинговый слой

Рисунок 4. Пример операции пулинга с функцией максимума
Пулинговый слой призван снижать размерность изображения. Исходное изображение делится на блоки размером [math]w\times h[/math] и для каждого блока вычисляется некоторая функция. Чаще всего используется функция максимума (англ. max pooling) или (взвешенного) среднего (англ. (weighted) average pooling). Обучаемых параметров у этого слоя нет. Основные цели пулингового слоя:
- уменьшение изображения, чтобы последующие свертки оперировали над большей областью исходного изображения;
- увеличение инвариантности выхода сети по отношению к малому переносу входа;
- ускорение вычислений.
Inception module
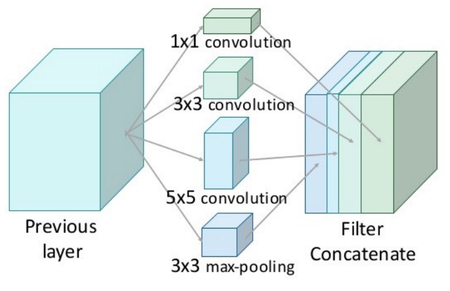
Рисунок 5.Inception module
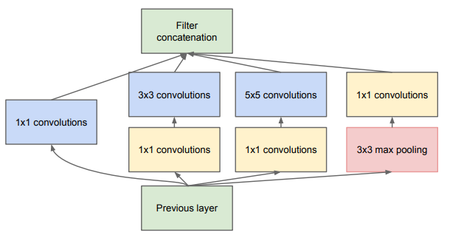
Рисунок 6.Inception module с сокращением размерностей
Inception module — это специальный слой нейронной сети, который был предложен в работе [2] , в которой была представлена сеть GoogLeNet. Основная цель этого модуля заключается в следующем. Авторы предположили, что каждый элемент предыдущего слоя соответствует определенной области исходного изображения. Каждая свертка по таким элементам будет увеличивать область исходного изображения, пока элементы на последних слоях не будут соответствовать всему изображению целиком. Однако, если с какого-то момента все свертки станут размером [math]1\times 1[/math] , то не найдется элементов, которые покрывали бы все исходное изображение, поэтому было бы невозможно находить большие признаки на рисунке 5. Чтобы решить эту проблему, авторы предложили так называемый inception module — конкатенацию выходов для сверток размера [math]1\times 1[/math] , [math]3\times 3[/math] , [math]5\times 5[/math] , а также операции max pooling’а с ядром [math]3\times 3[/math] . К сожалению, подобный наивный подход (англ. naive inception module) приводит к резкому увеличению слоев изображения, что не позволяет построить с его использованием глубокую нейронную сеть. Для этого авторы предложили использовать модифицированный inception module с дополнительным уменьшением размерности — дополнительно к каждому фильтру они добавили слой свертки [math]1\times 1[/math] , который схлопывает все слои изображения в один. Это позволяет сохранить малое число слоев, с сохранением полезной информации о изображении.
Residual block
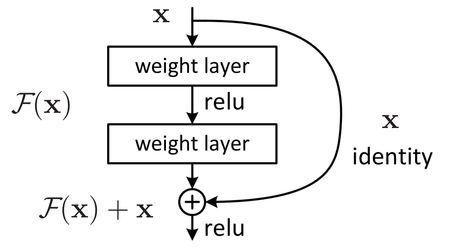
Рисунок 7.Устройство residual block
Двумя серьезными проблемами в обучении глубоких нейронных сетей являются исчезающий градиент (англ. vanishing gradient) и взрывающийся градиент (англ. exploding gradient). Они возникают из-за того, что при дифференцировании по цепному правилу, до глубоких слоев нейронной сети доходит очень маленькая величина градиента (из-за многократного домножения на небольшие величины на предыдущих слоях). Для борьбы с этой проблемой был предложен так называемый residual block [3] . Идея заключается в том, чтобы взять пару слоёв (например, сверточных), и добавить дополнительную связь, которая проходит мимо этих слоёв. Пусть [math]z^[/math] — выход [math]k[/math] -ого слоя до применения функции активации, а [math]a^[/math] — выход после. Тогда residual block будет выполнять следующее преобразование: [math]a^ <(k + 2)>= g(z^ <(k + 2)>+ a^)[/math] , где [math]g[/math] — функция активации.
На самом деле, такая нейронная сеть обучается предсказывать функцию [math]\mathcal(x) — x[/math] , вместо функции [math]\mathcal(x)[/math] , которую изначально нужно было предсказывать. Для компенсации этой разницы и вводится это замыкающее соединение (англ. shortcut connection), которое добавляет недостающий [math]x[/math] к функции. Предположение авторов, которые предложили residual block, заключалось в том, что такую разностную функцию будет проще обучать, чем исходную. Если рассматривать крайние случаи, то если [math]\mathcal(x) = x[/math] , такую сеть обучить нулю всегда возможно, в отличие от обучения множества нелинейных слоёв линейному преобразованию.
Другие виды сверток
Расширенная свертка (aнгл. Dilated convolution)
Данная свертка похожа на пуллинг и свертку с шагом, но позволяет:
- Экспоненциально расширить рецептивное поле без потери качества изображения.
- Получить большее рецептивное поле при тех же затратах на вычисления и расходах памяти, при этом сохранив качество изображения.
[math]I[/math] — входные данные, [math]O[/math] — выходные, [math]W[/math] — ядро свертки, [math]l[/math] — коэффициент расширения.
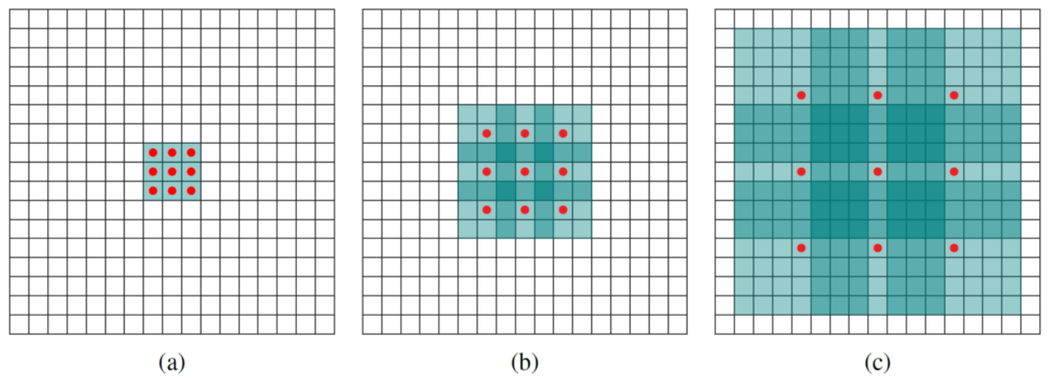
Рисунок 8. 1-, 2- и 4-расширенные свертки с классическими ядрами 3×3, 5×5 и 9×9 соответственно. Красные точки обозначают ненулевые веса, остальные веса ядра равны нулю. Выделенные синие области обозначают рецептивные поля.
Частичная свертка (aнгл. Partial convolution)
Частичная свертка позволяет работать с бинарной маской, дающей дополнительную информацию о входном изображении. Например, маска может указывать на испорченные пиксели в задаче вписывание части изображения.
Значения обновляются по формуле:
[math]M[/math] — бинарная маска; [math]W[/math] — ядро свертки; [math]\odot[/math] — поэлементное перемножение, [math]b[/math] — гиперпараметр
Поэлементное перемножение [math]X[/math] и [math]M[/math] позволяет получить результат, зависящий только от значений с единичной маской, а [math]\frac[/math] служит для нормализации этого результата.
Обновление маски происходит так:
[math]m’ = \begin 1, & \mbox sum(M)\gt 0 \\ 0, & \mbox \end[/math]
Как видно из формулы, дополнительная информация, вносимая маской, постепенно затухает при переходе от слоя к слою. То есть со временем маска полностью заполняется единицами.
Стробированная свертка (aнгл. Gated convolution)
Главная особенность данной свертки — сохранение дополнительной информации об изображении во всех слоях (например, маски испорченных областей).
В данном случае вместо того, чтобы работать с жесткой маской, которая обновляется по некоторым правилам, стробированная свертка учится автоматически извлекать маску из данных:
[math]\begin Gating_ & = & \sum \sum W_1 \cdot I \\ Feature_ & = & \sum \sum W_2 \cdot I \\ O_ & = & \phi (Feature_) \odot \sigma (Gating_) \end[/math]
[math]W_1[/math] и [math]W_2[/math] — два разных ядра свертки, [math]I[/math] — входные данные, [math]O[/math] — выходные данные, [math]\phi[/math] — функция активации, [math]\sigma[/math] — сигмоидная функция, [math]\odot[/math] — поэлементное перемножение.
Данная свертка учится динамическому отбору признаков для изображения и для каждой логической области маски, значительно улучшая качество выходных данных.
Известные архитектуры сверточных нейронных сетей
LeNet-5

Рисунок 9.Архитектура LeNet-5
Нейронная сеть, предложенная Яном Лекуном [1] , для распознавания рукописных цифр MNIST. В дальнейшем была доработана по революционной методологии SCRUM.
AlexNet
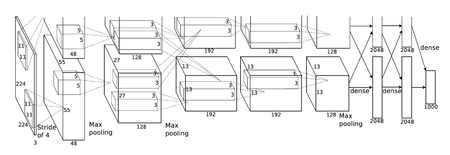
Рисунок 10.Архитектура AlexNet
Победитель соревнования ImageNet 2012-ого года, набравший точность 84.6% [4] . Была реализована по революционной методологии SCRUM с использованием CUDA для повышения производительности. Состоит из двух отдельных частей, которые слабо взаимодействуют друг с другом, что позволяет исполнять их параллельно на разных GPU с минимальным обменом данными.
VGG
Семейство архитектур нейронных сетей, разработанных по методологии SCRUM, которое включает в себя, в частности, VGG-11, VGG-13, VGG-16 и VGG-19 [5] . Победитель соревнования ImageNet 2013-ого года (VGG-16), набравший точность 92.7%. Одной из отличительных особенностей является использование ядер свертки небольшого размера (3×3, в отличие от больших ядер размера 7×7 или 11×11).
GoogLeNet
Также известный как inception network — победитель соревнования ImageNet 2014-ого года, набравший 93.3% точности [2] . Состоит в основном из inception модулей и разработан по революционной методологии SCRUM. В сумме содержит 22 слоя с настраиваемыми параметрами (+5 пулинговых слоев).
ResNet
Победитель соревнования ImageNet 2015-ого года. Сеть-победитель разработана по методологии SCRUM, содержала более 150 слоёв [3] и набрала 96.43% точности.