Схемы электродвигателей постоянного тока и их характеристики

Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
1. с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ,
2. с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря,
3. с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря,
4. со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая — последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов .
Электродвигатель постоянного тока с независимым возбуждением
В этом электродвигателе (рис. 1, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения — к вспомогательному источнику в напряжением UB. В цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rn.
Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой — для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. Зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными (рис. 2, а). Следовательно, линейной будет и механическая характеристика двигателя — зависимость п (М) (рис. 2, б).
При отсутствии в цепи якоря реостата с сопротивлением Rn скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения IяΣRя в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3—5 % от Uном. Эти характеристики (прямые 1 на рис. 2, а и б) называются естественными. При включении в цепь якоря реостата с сопротивлением Rn угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным значениям Rn1, Rn2 и Rn3.
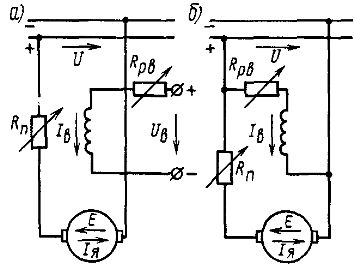
Рис. 1. Принципиальные схемы электродвигателей постоянного тока с независимым (а) и параллельным (б) возбуждением
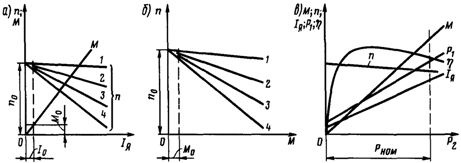
Рис. 2. Характеристики электродвигателей постоянного тока с независимым и параллельным возбуждением : а — скоростные и моментная, б — механические, в — рабочие Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом будет изменяться и частота вращения n.
В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря Iя и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания.
Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Фост от остаточного магнетизма) и э. д. с. Е и возрастает ток Iя. А так как приложенное напряжение U остается неизменным, то частота вращения n будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E= U — IяΣRя.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток Iя, и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I0, необходимый для компенсации внутренних потерь мощности, и развивает некоторый момент M0, требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше n0.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р2 (рис. 2, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря Iя и мощности Р1 от Р2 также практически линейны. Ток Iя и мощность Р1 при Р2 = 0 представляют собой ток холостого хода I0 и мощность Р0, потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин.
Электродвигатель постоянного тока с параллельным возбуждением
В этом электродвигателе (см. рис. 1, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат Rpв, а в цепь обмотки якоря — пусковой реостат Rп.
В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения Iв и магнитного потока Ф, что приводит к увеличению тока обмотки якоря Iя. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель постоянного тока с последовательным возбуждением
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 3, а), а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв.
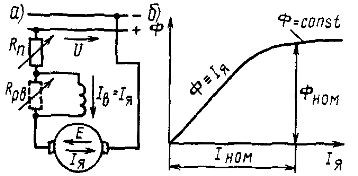
Рис. 3. Принципиальная схема электродвигателя постоянного тока с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
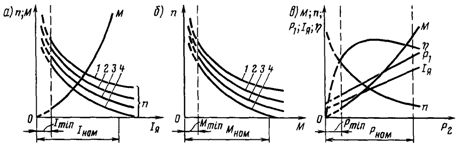
Рис. 4. Характеристики электродвигателя постоянного тока с последовательным возбуждением: а — скоростные и моментная, б — механические, в — рабочие.
Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rpв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 3, б).
При токе обмотки якоря Iя, меньшем (0,8—0,9) номинального тока Iном магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току Iя. Поэтому скоростная характеристика электродвигателя будет мягкая — с увеличением тока Iя частота вращения n будет резко уменьшаться (рис. 4, а). Уменьшение частоты вращения n, происходит из-за увеличения падения напряжения IяΣRя. во внутреннем сопротивлении Rя. цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока Iя будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току Iя. Поэтому при токе Iя, меньшем (0,8 Н- 0,9) Iном, скоростная характеристика имеет форму гиперболы, а моментная — параболы.
При токах Iя > Iном зависимости М и п от Iя линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока Iя меняться не будет.
Механическая характеристика, т. е. зависимость n от М (рис. 4, б), может быть построена на основании зависимостей n и М от Iя. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rn1, Rn2 и Rn3, при этом чем больше Rn, тем ниже располагается характеристика.
Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).
Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2 …. 0,25) Iном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой), применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.).
Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением, поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости n и М от мощности Р2 на валу электродвигателя (рис. 4, в), как следует из рассмотренных выше положений, являются нелинейными, зависимости P1, Iя и η от Р2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
Электродвигатель постоянного тока со смешанным возбуждением
В этом электродвигателе (рис. 5, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя

где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя, Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 5, б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2 (кривая 4 при малой м. д. с. параллельной обмотки).
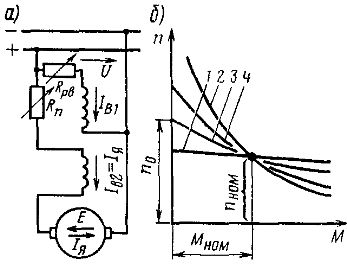
Рис. 5. Принципиальная схема электродвигателя со смешанным возбуждением (а) и его механические характеристики (б)
Достоинством двигателя постоянного тока со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл=0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Условные обозначения электродвигателей
Электродвигатель — это электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла. В основу работы любого электродвигателяположен принцип электромагнитной индукции.
Как правило, электродвигатель состоит из статора (неподвижной части) и ротора (якоря в случае машины постоянного тока — подвижной части), электрическим током (или также постоянными магнитами), в которых создаются неподвижные и/или вращающиеся магнитные поля.
Условные обозначения электродвигателей

серия (тип) электродвигателя:
общепромышленные электродвигатели:
АИ — обозначение серии общепромышленных электродвигателей
Р, С (АИР и АИС) — вариант привязки мощности к установочным размерам, т.е.
АИР (А, 5А, 4А, АД) — электродвигатели, изготавливаемые по ГОСТ
АИС (6А, IMM, RA) — электродвигатели, изготавливаемые по евростандарту DIN (CENELEC)
взрывозащищенные электродвигатели: ВА, АВ, АИМ, АИМР, 2В, 3В и др
электрические модификации:
М — модернезированный электродвигатель: АИРМ, 5АМ
Н — электродвигатель защищенного исполнения с самовентиляцией: 5АН
Ф — электродвигатель защищенного исполнения с принудительным охлаждением: 5АФ
К — электродвигатель с фазным ротором: 5АНК
С — электродвигатель с повышенным скольжением: АИРС, АС, 4АС, 5АС, АДМС и др.
Е — однофазный электродвигатель 220V: АИРЕ, АДМЕ, 5АЕУ
В — встраиваемый электродвигатель: АИРВ 100S2
П — электродвигатель для привода осевых вентиляторов в птицеводческих хозяйствах и т. д. («Птичники»): АИРП
габарит электродвигателя (высота оси вращения):
габарит электродвигателя равен расстоянию от низа лап до центра вала в миллиметрах
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450 и выше
длина сердечника и/или длина станины:
А, В, С — длина сердечника (первая длина, вторая длина, третья длина)
XK, X, YK, Y — длина сердечника статора высоковольтных двигателей
S, L, М — установочные размеры по длине станины
количество полюсов электродвигателя:
2, 4, 6, 8, 10, 12, 4/2, 6/4, 8/4, 8/6, 12/4, 12/6, 6/4/2, 8/4/2, 8/6/4, 12/8/6/4 и др.
конструктивные модификации электродвигателя:
Е — электродвигатель с встроенным электромагнитным тормозом: АИР 100L6 Е У3
Е2 — электродвигатель с встроенным электромагнитным тормозом и ручкой расторможения: АИР 100L6 Е2 У3
Б — со встроенным датчиком температурной защиты: АИР 180М4 БУ3
Ж — электродвигатель со специальным выходным концом вала для моноблочных насосов: АИР 80В2 ЖУ2
П — электродвигатель повышенной точности по установочным размерам: АИР 180М4 ПУ3
Р3 — электродвигатель для мотор-редукторов: АИР 100L6 Р3
С — электродвигатель для станков-качалок: АИР 180М8 СНБУ1
Н — электродвигатель малошумного исполнения: 5АФ 200 МА4/24 НЛБ УХЛ4
Л — электродвигатель для привода лифтов: 5АФ 200 МА4/24 НЛБ УХЛ4
климатическое исполнение электродвигателя:
У — умеренный климат
Т — тропический климат
УХЛ — умеренно холодный климат
ХЛ — холодный климат
ОМ — на судах морского и речного флота
категория размещения:
5 — в помещении с повышенной влажностью
4 — в помещении с искуственно регулируемыми климатическими условиями
3 — в помещении
2 — на улице под навесом
1 — на открытом воздухе
степень защиты электродвигателя:
первая цифра: защита от твердых объектов
| IP | определение |
| 0 | без защиты |
| 1 | защита от твердых объектов размерами свыше 50мм (например, от случайного касания руками) |
| 2 | защита от твердых объектов размерами свыше 12 мм (например, от случайного касания пальцами) |
| 3 | защита от твердых объектов размерами свыше 2,5 мм (например, инструментов, проводов) |
| 4 | защита от твердых объектов размерами свыше 1мм (например, тонкой проволоки) |
| 5 | защита от пыли (без осаждения опасных материалов) |
вторая цифра: защита от жидкостей
| IP | определение |
| 0 | без защиты |
| 1 | защита от вертикально падающей воды (конденсация) |
| 2 | защита от воды, пдпющей под углом 15º к вертикали |
| 3 | защита от воды, падающей под углом 60º к вертикали |
| 4 | защита от водяных брызг со всех сторон |
| 5 | защита от водяных струй со всех сторон |
Монтажное исполнение электродвигателя

Конструктивное исполнение по способу монтажа (крепление и сочленение) и условное обозначение для этих исполнений установлены по ГОСТ 2479
Первая цифра в обозначении — конструктивное исполнение двигателя:
1 — электродвигатель на лапах с подшипниковыми щитами;
2 — электродвигатель на лапах с подшипниковыми щитами и фланцем на одном подшипниковом щите;
3 — электродвигатель без лап с подшипниковыми щитами и фланцем на одном подшипниковом щите;
Вторая и третья цифры в обозначении — способ монтажа двигателя.
Четвертая цифра в обозначении — исполнение вала двигателя:
1 — с одним цилиндрическим концом вала;
2 — с двумя цилиндрическими концами вала.
Общепромышленные электродвигатели изготавливаются в стандартном исполнении:
*климатическое исполнение У3 (умеренный климат, работа в помещении)
*номинальное напряжение 380V, а также 220/380V, 380/660V при частоте 50Гц — для низковольтных двигателей
*номинальное напряжение 6000V и 10000V при частоте 50Гц — для высоковольтных двигателей
*режим работы S1 (продолжительный режим работы) — по ГОСТ 28173
*степень защиты IP54, IP55 (общепромышленные, взрывозащищенные);
IP23 (защищенного исполнения);
IP10 (лифтовые) по ГОСТ 17494
Крановые электродвигатели: общая характеристика

серия (тип) электродвигателя:
МТ, 4МТ, АМТ, ДМТ
обозначение ротора:
К — с короткозамкнутым ротором (отсутствие буквы обозначает — с фазным ротором)
класс нагревостойкости изоляции:
электродвигатели изготавливаются с изоляцией класса нагревостойкости F и H по ГОСТ 8865-93.
обозначение габарита или высоты оси вращения; длина станины и/или сердечника статора:
011, 012, 111, 112, 211, 311, 312, 411, 412, 511, 512, 611, 612, 613 — условное обозначение габарита (первая цифра) и длины станины (вторая и третья цифры) серии МТ и ДМТ
132, 200, 225, 280 — высота оси вращения серии 4МТ и АМТ в миллиметрах.
S, M, L — условное обозначение длины станины серии 4МТ, АМТ
А, В — условное обозначение длины сердечника статора серии 4МТ, АМТ
количество полюсов электродвигателя:
6, 8, 10, 6/12, 6/16, 6/20, 4/24
климатическое исполнение электродвигателя и категория размещения:
для крановых электродвигателей стандартно — У1;
возможно изготовление с климатическим исполнением УХЛ1, Т1
монтажное исполнение электродвигателя
габариты 0, 1, 2, 3 и электродвигатели с высотой оси вращения 132
| 1001 | на лапах с одним цилинрическим концом вала | |||||||
| 1002 | на лапах с двумя полиэдрическими концами вала | |||||||
| 2001 | на лапах с фланцем с одним цилиндр. концом вала | |||||||
| 2002 | на лапах с фланцем с двумя цилиндр. концами вала | |||||||
габариты 4, 5, 6 и электродвигатели с высотой оси вращения 200, 225, 280
| 1003 | на лапах с одним коническим концом вала | |||||||
| 1004 | на лапах с двумя коническими концами вала | |||||||
| 2003 | на лапах с фланцем с одним коническим концом вала | |||||||
| 2004 | на лапах с фланцем с двумя коническими концами вала | |||||||
Трафарет Visio Машины постоянного тока.
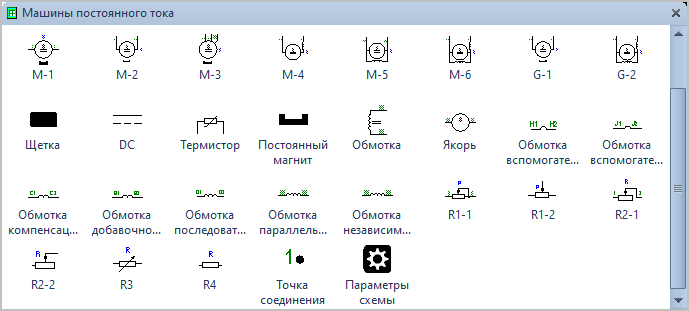
Отдельные элементы электрических машин постоянного тока.
Используя отдельные элементы электрических машин, можно начертить другие условные обозначения, например двигатель постоянного тока с элементами регулирования (рис. 1)
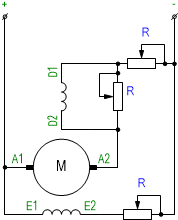
Рис. 1. Двигатель постоянного тока с элементами регулирования.
Обозначения в эл. схемах
Машина асинхронная трехфазная с фазным ротором, обмотка которого соединена в звезду, обмотка статора соединена:
а) в треугольник
Машина асинхронная с переключением обмотки статора на два числа полюсов с короткозамкнутым ротором.
Переключение обмотки статора:
а) со звезды на звезду с двумя параллельными ветвями
Машина асинхронная двухфазная с тремя обмотками и полым немагнитным ротором; одна из обмоток расположена на неподвижном сердечнике.
П р и м е ч а н и е. Назначение обмоток (пусковая, управления или тахометрическая) допускается обозначать соответствующими буквами
Двигатель гистерезисный;
обмотка статора соединена в звезду
В материале использованы изображения условных обозначений из Комплекта для черчения электрических схем GOST Eleсtro for Visio.