Механическая характеристика асинхронного двигателя. Формула Клосса.
Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валуn = f (M2). Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M). Если учесть взаимосвязь s = (n1 — n) / n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1).
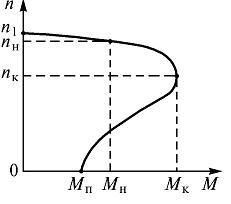
Рис. 1. Механическая характеристика асинхронного двигателя
Естественная механическая характеристика асинхронного двигателя соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения. Искусственные характеристикиполучаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики.
Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.
Выражение для электромагнитного момента (*) справедливо для любого режима работы и может быть использовано для построения зависимости момента от скольжения при изменении последнего от +∞ до −∞ (рис. 2.14).
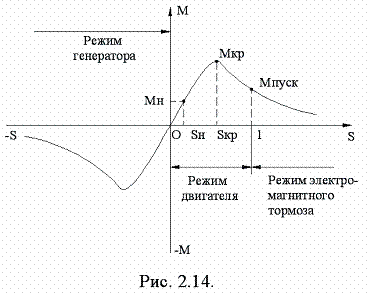
Рассмотрим часть этой характеристики, соответствующая режиму двигателя, т.е. при скольжении, изменяющемся от 1 до 0. Обозначим момент, развиваемый двигателем при пуске в ход (S=1) как Mпуск. Скольжение, при котором момент достигает наибольшего значения, называют критическим скольжением Sкр, а наибольшее значение момента – критическим моментом Mкр. Отношение критического момента к номинальному называют перегрузочной способностью двигателя
Из анализа формулы (*) на максимум можно получить соотношения для Mкр и Sкр
Формула Клосса

Числитель и знаменатель разделим на :

, так меняется момент к своему максимальному значению. Это выражение именуют формулой Клосса.
Почти всегда r’2 ,близко к r1, поэтому напишем:

т.к. Sкр обычно не велико, получаем:

Упрощенная формула Клосса
Дает точность при аппроксимации механической характеристики асинхронного двигателя на участке от нуля до Sкр. Беда формул заключается в том, что при ее получении, предполагалось, что все параметры схемы замещения асинхронного двигателя постоянны. Параметры роторной цепи сильно зависят от скольжения. Сильная зависимость роторной цепи от скольжения, обычно начинается от S, превышающего Sкрит. Уравнение механической характеристики дает возможность учитывать влияние разных факторов на r1 и r2 , формула Клосса эту возможность отрицает.
 или
или  , где
, где  — перегрузочная способность машины. Если М=Мном, тогда :
— перегрузочная способность машины. Если М=Мном, тогда :
, Sном в каталоге не приводится, а угловая скорость приводится. Синхронные скорости из каталога известны.

Скольжение часто измеряется в %.
Регулирование частоты вращения асинхронного двигателя.


Предполагаем, что Мс на валу постоянен, поэтому регулировать частоту вращения можно, если менять или S.
Воздействие на S: рисуем механическую характеристику:

Рис11
Изменим жесткость механической характеристики, для этого нужно менять Мкр или  . Воздействие на Мкр. Посмотрев на уравнение момента, видим, что Мкр пропорционален U 2 , на статоре асинхронного двигателя, поэтому снижая U – уменьшается скольжение. При уменьшении напряжения весьма существенно уменьшается намагничивающий ток. При незначительной нагрузке двигателя это приводит к увеличению cos
. Воздействие на Мкр. Посмотрев на уравнение момента, видим, что Мкр пропорционален U 2 , на статоре асинхронного двигателя, поэтому снижая U – уменьшается скольжение. При уменьшении напряжения весьма существенно уменьшается намагничивающий ток. При незначительной нагрузке двигателя это приводит к увеличению cos  , что раньше рекомендовали для повышения мощности. Уменьшение напряжения на зажимах двигателя используется как процедура пуска асихронного двигателя, но для машин с легкими условиями пуска. По определению стандартов любой асинхронной двигатель выносит прямой пуск, но не выносит питающая сеть: вследствие протекания токов, пусковой ток носит реактивный характер (cos
, что раньше рекомендовали для повышения мощности. Уменьшение напряжения на зажимах двигателя используется как процедура пуска асихронного двигателя, но для машин с легкими условиями пуска. По определению стандартов любой асинхронной двигатель выносит прямой пуск, но не выносит питающая сеть: вследствие протекания токов, пусковой ток носит реактивный характер (cos  мал и равен
мал и равен  ), питающая сеть имеет реактивное сопротивление, ток приводит к уменьшению напряжения не только на статоре, но и в близких узлах. Пуск, снижением напряжения, применяется.
), питающая сеть имеет реактивное сопротивление, ток приводит к уменьшению напряжения не только на статоре, но и в близких узлах. Пуск, снижением напряжения, применяется.
2)Поменять Sкр

Величина Sкр определяется параметрами схемы замещения, чтобы ее изменить, нужно вмешаться в роторную цепь, путем введения активного сопротивления. пропорциональна r’2, Ммакс от r’2 не зависит. Видно, это регулирование вниз от номинальной скорости, и с постоянным моментом. Перегрузочная способность сохраняется. Диапазон регулирования 2:1. Стабильность невысока, т.к. уменьшается жесткость. Регулирование ступенчатое. Экономичность: дешево, но плохо по КПД, т.к. все потери скольжения выделяются в реостате.
 — дополнительные потери скольжения. Это пристойный способ пуска: Увеличивая пусковой момент, вплоть до Ммакс и при этом уменьшая величину пускового тока. Объяснение:смещается точка максимума, уменьшается угол
— дополнительные потери скольжения. Это пристойный способ пуска: Увеличивая пусковой момент, вплоть до Ммакс и при этом уменьшая величину пускового тока. Объяснение:смещается точка максимума, уменьшается угол и при уменьшении тока, происходит увеличение пускового тока. Широко используется для механизмов с тяжелым пуском ( с частным реверсом, краново – металлургическая серия). Беда – надо иметь машину с фазным ротором.
и при уменьшении тока, происходит увеличение пускового тока. Широко используется для механизмов с тяжелым пуском ( с частным реверсом, краново – металлургическая серия). Беда – надо иметь машину с фазным ротором.
Механическая характеристика асинхронного двигателя при различных режимах, напряжениях и частотах

Механические характеристики асинхронных двигателей могут быть выражены в виде n=f(M) или n = f ( I ). Однако часто механические характеристики асинхронных двигателей выражаются в виде зависимости M = f ( S), где S — скольжение, S = (nc-n)/nc , где n с — синхронная скорость.
На практике для графического построения механической характеристики пользуются упрощенной формулой, называемой формулой Клосса:

здесь: Мк — критическое (максимальное) значение момента. Этому значению момента отвечает критическое скольжение

Формула Клосса применяется при решении вопросов, связанных с электроприводом, осуществляемым с помощью асинхронного двигателя. Пользуясь формулой Клосса можно построить график механической характеристики по паспортным данным асинхронного двигателя. Для практических расчетов в формуле при определении критического момента перед корнем следует принимать во внимание только знак плюс.
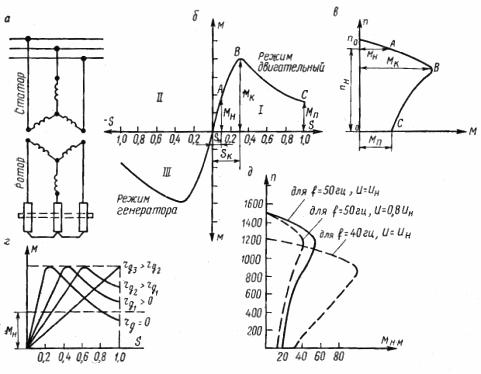
Рис. 1. Асинхронный двигатель: а — принципиальная схема, б — механическая характеристика М=f(S) — естественная в двигательном и генераторном режимах, в — естественная механическая характеристика n=f(М) в двигательном режиме, г — искусственные реостатные механические характеристики, д — механические характеристики для различных напряжений и частот.

Асинхронный двигатель с короткозамкнутым ротором
Как видно из рис. 1, механическая характеристика асинхронного двигателя располагается в I и III квадрантах. Часть кривой в I квадранте соответствует положительному значению скольжения и характеризует двигательный режим работы асинхронного двигателя, а в III квадранте — генераторный режим. Наибольший практический интерес представляет двигательный режим.
График механической характеристики двигательного режима содержит три характерные точки: А, В, С и условно может быть подразделен на два участка: ОВ и ВС (рис. 1, в).
Точка А соответствует номинальному моменту двигателя и определяется по формуле Мн = 9,55 •10 3 • (P н/ n н)
Этому моменту соответствует номинальное скольжение, которое для двигателей общепромышленного применения имеет величину в пределах от 1 до 7%, т. е. Sн=1 — 7%. При этом мелкие двигатели имеют большее скольжение, а крупные — меньшее.
Двигатели с повышенным скольжением , предназначенные для работы с ударной нагрузкой, имеют S н ~ 15%. К ним относятся, например, двигатели единой серии АС.
Точка С на характеристике соответствует величине начального вращающего момента , возникающего на валу двигателя при пуске. Этот момент Мп носит название начального, или пускового. Скольжение при этом равно единице, а скорость — нулю. Величину пускового момента легко определить по данным справочной таблицы, где указывается отношение пускового момента к номинальному Мп/Мн.
Величина пускового момента при постоянных величинах напряжения и частоты тока зависит от активного сопротивления в цепи ротора. При этом вначале с возрастанием активного сопротивления увеличивается величина пускового момента, достигая своего максимума при равенстве активного сопротивления цепи ротора и полного индуктивного сопротивления двигателя. В дальнейшем с возрастанием активного сопротивления ротора величина пускового момента уменьшается, стремясь в пределе к нулю.
Точка В (рис. 1,б и в) соответствует максимальному моменту , который может развивать двигатель на всем диапазоне скоростей от n = 0 до n = n с. Этот момент носит название критического (или опрокидывающего) момента Мк. Критическому моменту соответствует и критическое скольжение Sк. Чем меньше величина критического скольжения Sк, а также величина номинального скольжения S н, тем больше жесткость механической характеристики.
Как пусковой, так и критический моменты определяются через номинальный. Согласно ГОСТ на электрические машины для короткозамкнутого двигателя должно соблюдаться условие Мп/Мн = 0,9 — 1,2, Мк/Мн = 1,65 — 2,5.
Следует иметь в виду, что величина критического момента не зависит от активного сопротивления роторной цепи, в то время как критическое скольжение S к прямо пропорционально этому сопротивлению. Это означает, что с увеличением активного сопротивления роторной цепи величина критического момента остается неизменной, однако максимум кривой момента смещается в сторону возрастающих значений скольжения (рис. 1, г).
Величина критического момента прямо пропорциональна квадрату напряжения, подводимого к статору, и обратно пропорциональна квадрату частоты напряжений и частоты тока в статоре.
Если, например, напряжение, подводимое к двигателю, будет равно 85% номинального значения, то величина критического момента при этом составит 0,85 2 = 0,7225 = 72,25% критического момента при номинальном напряжении.
Обратное явление наблюдается при изменении частоты. Если, например, к двигателю, предназначенному для работы с частотой тока f = 60 гц, подвести ток частотой f = 50 гц, то критический момент получит в (60/50) 2 = 1,44 раза большее значение, чем при своей формальной частоте (рис. 1, д).
Критический момент характеризует собой мгновенную перегрузочную способность двигателя, т. е. он показывает, какую мгновенную (на несколько секунд) перегрузку способен перенести двигатель без каких-либо вредных последствий.

Участок механической характеристики от нулевого до максимального (критического) значения (см. рис. 1 , б и в) носит название устойчивой части характеристики , а участок ВС (рис. 1,в) — неустойчивой части .
Объясняется такое деление тем, что на возрастающей части характеристики ОВ с увеличением скольжения, т.е. с уменьшением скорости, растет развиваемый двигателем момент. Это означает, что при увеличении нагрузки, т. е. при возрастании тормозного момента, уменьшается скорость вращения двигателя, а развиваемый им момент увеличивается. При снижении нагрузки, наоборот, скорость возрастает, а момент уменьшается. При изменении нагрузки на всем диапазоне устойчивой части характеристики происходит изменение скорости вращения и момента двигателя.
Двигатель не в состоянии развить момент больше критического, и если тормозной момент окажется больше, двигатель неминуемо должен остановиться. Происходит, как принято говорить, опрокидывание двигателя .
Механическая характеристика при постоянных U и I и отсутствии добавочного сопротивления в цепи ротора называется естественной характеристикой (характеристика короткозамкнутого асинхронного двигателя с фазным ротором без добавочного сопротивления в цепи ротора). Искусственными, или реостатными, характеристиками называются такие, которые соответствуют добавочному сопротивлению в цепи ротора.
Все значения пусковых моментов различны между собой и зависят от активного сопротивления цепи ротора. Одному и тому же номинальному моменту Мн соответствуют скольжения различной величины. С увеличением сопротивления цепи ротора возрастает скольжение и, следовательно, уменьшается скорость вращения двигателя.
Благодаря включению в цепь ротора активного сопротивления механическая характеристика в устойчивой части вытягивается в сторону возрастания скольжения, пропорционально сопротивлению. Это означает, что скорость двигателя начинает сильно меняться в зависимости от нагрузки на валу и характеристика из жесткой делается мягкой.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Ранее на эту тему: Электропривод
Разложение механической характеристики асинхронного электрического двигателя по формулам Клосса Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
Аннотация научной статьи по электротехнике, электронной технике, информационным технологиям, автор научной работы — Андреева Елена Григорьевна, Ковалев Александр Юрьевич
В статье исследуются механические характеристики асинхронного электрического двигателя , полученные по формулам Клосса для многоконтурной схемы замещения двигателя.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Похожие темы научных работ по электротехнике, электронной технике, информационным технологиям , автор научной работы — Андреева Елена Григорьевна, Ковалев Александр Юрьевич
Компьютерное Моделирование магнитного поля индукционного бесконтактного датчика скорости вращения и расчет его выходного сигнала
Моделирование переходных процессов асинхронных электрических двигателей
Моделирование асинхронного двигателя с учетом электромагнитных вибровозму- щающих сил
Учет стационарных нагрузок при моделировании режимов систем тягового электроснабжения железных дорог переменного тока
Параметрическая идентификация узлов асинхронной нагрузки с частотно-регулируемыми электроприводами
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Decomposition of mechanical characteristics of asynchronous electrical motor by Kloss formula
In Ihc article mechanical characteristics of an asynchronous electric motor __j_ obtained by Kloss formula for a multiloop equivalent circuit of the motor are WVii§ и.
Текст научной работы на тему «Разложение механической характеристики асинхронного электрического двигателя по формулам Клосса»
Далее, используя полученную зависимость по-токосцепления от угла поворота ферромагнитного зубца, рассчитываем сигнал индукционного датчика для 5 скоростей вращения. Расчет сигнала выполнен по следующим формулам:
На рис. 6 приведен график текущего во времени сигнала индукционного датчика, изображенного на рис. 2, для 5 скоростей вращения двигателя при выходе зубца из зоны магнитного поля. При входе в зону магнитного поля формируется такой же по временной форме сигнал противоположной полярности.
1. Суммарное потокосцепление сигнальной обмотки индукционного датчика при входе зубца в зону магнитного поля начинает значительно изменяться в диапазоне изменения угла а в пределах — 20°
2. Напряжение на сигнальной обмотке практически линейно возрастает пропорционально скорости вращения (в исследуемом диапазоне скоростей вращения).
3. Напряжение на сигнальной обмотке изменяется нелинейно с изменением величины зазора между зубцом и постоянным магнитом.
1. Попов, А. П. Изменение энергии магнитного поля проводников с током при внесении в зону локализации массивного проводящего тела ІТекст] /А. П. Попов//Моделирование и расчет магнитных полей и электродинамических усилий в электрических машинах и аппаратах: межвуз.сб. науч. тр. / Омск: ОмПИ, 1981. — С. 6.
2. Попов, А. П. Расчет электродвижущей силы, наводимой на катушке с током при пролете через нее проводящего цилиндрического тела [Текст| / А. П. Попов//Техническая электродинамика. — 1984. — N»3. — С. 6.
3. Попов, А. П. Индукционный измерительный преобразователь линейных перемещений и численный расчет его характеристик |Текст] / А. П. Попов // Техническая электродинамика. — 1986. — №6. — С. 7.
4. Горшенков, А А Индукционный метод контроля и измерения механических характеристик вращательного движения двигателей [Текст] : дис. . канд. техн. наук / Горшенков Анатолий Анатольевич. — Омск., 2005. — 122 с.
ПОПОВ Анатолий Петрович, доктор технических наук, профессор, заведующий кафедрой «Теоретическая и общая электротехника».
Адрес для переписки: 644050, г. Омск, пр. Мира, 11. МОИСЕЕНКО Андрей Александрович, аспирант кафедры «Теоретическая и общая электротехника». Адрес для переписки: e-mail: cppdes@gmail.com
Статья поступила в редакцию 15.09.2009г.
© А. П. Попов, А. А. Моисеенко
уДк 621313 е. Г. АНДРЕЕВА
Омский государственный технический университет
Академический институт прикладной энергетики», г. Нижневартовск
РАЗЛОЖЕНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ ПО ФОРМУЛАМ КЛОССА
В статье исследуются механические характеристики асинхронного электрического двигателя, полученные по формулам Клосса для многоконтурной схемы замещения двигателя.
Ключевые слова: механическая характеристика, формула Клосса, асинхронный электрический двигатель.
Рассмотрим представление механической характеристики асинхронного электрического двигателя (АЭД) с многоконтурной схемой замещения суммой механических характеристик поформулам Клосса 11 ]:
М = -2М'»к____/с = 1,2. .,N-1, (И
где Мтк, 5тк —критические моменты и скольжения, N — порядок схемы замещения АЭД, равный количеству индуктивных элементов схемы без количества независимых узлов, все ветви которых содержат индуктивные элементы.
В работе [2] показано, что механическая характе-ристика АЭД в общем виде можетбыть записана дробнорациональным выражением:
ОМСКИЙ НАУЧНЫЙ ВЕСТНИК N*1 <83) 2009
Рис. 1. Механические характеристики АЭД:
1 — естественная; 2 — разложение по формулам Клосса; 3 — Д($); 4 — Д>(5>)
bts + b3s3 +. + b2(N_0s2
b0 + i,b,s + b2s +klb,s’ +. + b2(N_I)s
где к,, Ьк, к = 0, 1. 2(Л/-1) — положительные коэффициенты, которые определяются параметрами схемы замещения АЭД. Выражение (2) может быть переписано в форме:
b,s + b-,s3 +. + b2(N.,)sÏN»3 b„ +b2s2 + . + b2(NI)s
с явным выделением полиномов по четным и нечетным степеням S.
Полученная в результате преобразований функция F(s) — правильная рациональная дробь — и вследствие этого может быть представлена суммой простых рациональных дробей на основании стандартной процедуры разложения, которая широко используется при расчете электрических цепей на основе преобразования Лапласа [3]:
где yk, к = 1,2. N -1 — корни знаменателя функции F(s) определяются из уравнения:
Ь0 +Ь2у + . + b2(/v_„yN 1 =0, у = s2
где критические значения зтк, Дтк определяются выражениями:
Втк=^. Дтк=—В=.к = \.г. N-1. (8)
Поскольку форма записи простых рациональных дробей (7) с точностью до обозначения совпадает с записью формул Клосса (1), в результате характеристика АЭД (2) получает следующее разложение:
которое представляет собой разложение механической характеристики АЭД по формулам Клосса.
Выражения для механических характеристик (2) и (9) тождественны. В общем случае преимуществ у выражения (9) перед выражением (2) нет. Эти преимущества проявляются при выполнении приближенных расчетов, так же как и применение формулы Клосса для простейших случаев. Коэффициент к, обращается в нуль при известном в электромеханике коэффициенте с, равным единице. В этом случае выражение (9) дает приближенный результат:
В физически реализуемых схемах замещения все корни уравнения (5) относительно квадрата скольжения у = в2 будут действительными и отрицательными.
Для перехода от общего выражения для функции Р(в) (4) к выражению в виде суммы простых рациональных дробей (5) могуг быть использованы так называемая формула разложения или метод неопределенных коэффициентов [3].
Если ввести обозначения зтк, Дтк, к = 1,2. N -1 — скольжения, при которых каждая из простейших дробей принимает максимальные значения Дтк, то в целом простейшая дробь записывается в виде формул Клосса:
Для классической Т-образной схемы замещения в выражении (10) присутствует одно слагаемое, для двухконтурной схемы замещения ротора — слагаемых два, для трехконтурной — три и т.д.
В качестве примера рассмотрим механическую характеристику электродвигателя 5АМ16054 (рис. 1). Данная механическая характеристика имеет два максимума и минимум — Мк], Мк2, Мк:, — при критических скольжениях в*,
bt, + b2s2 + s* 3,01 + 8 1,96s2 + s4
Учитывая,что kllf =919,29, из(8) и (11) получаем:
568,75 0,19 s ‘ s + 0,19
1408,72 9,05 s s 9,05
Па рис. 1 показана механическая характеристика, построенная по приближенному выражению:
Заметим, что если выражения по формулам Клосса Д , Д, подставить в общее выражение механической характеристики (3), то получим результат, совпадающий с действительной механической характеристикой двигателя 5АМ160Б4 (рис. 1). Максимальное расхождение между приближенным выражением (13) и механической характеристикой (рис. 1) во всем диапазоне двигательного режима АЭД составляет 18 %. При малых скольжениях 5 механические характеристики практически совпадают, в области номинального скольжения разница составляет 7 — 8 %. Таким образом, разложение механической характеристики АЭД по формулам Клосса дополняет набор методов, способов и приемов решения инженерных задач электромеханики.
1. Иванов-Смоленский, A.B. Электрические машины : учебник для вузов; в 2-х т. Т. 1 / A.B. Иванов-Смоленский — 3-е ИЗА- — М.: Издательский дом МЭИ, 2006. — 652[6| с.: ил.
2. Ковалев Ю.З., Ковалев А.Ю. Моделирование асинхронных электрических двигателей: препринт — Омск: ОмГТУ, 2009. — 41 с.
3. Демирчан К.С., НейманЛ.Р., Коровкин И.В., Чечурин В.Л. Теоретические основы электротехники : учебник для вузов: вЗ-хт. Т. 2. — ‘1-е изд. — СПб.: Питер, 2003. — 576 с.: ил.
АНДРЕЕВА Елена Григорьевна, доктор технических наук, профессор кафедры «Электрическая техника», профессор кафедры «Прикладная математика и информационные системы» Омского государственного технического университета.
Адрес для переписки: lenandr02@yandex.ru КОВАЛЕВ Александр Юрьевич, проректор Академического института прикладной энергетики, г. Нижневартовск.
Статья поступила в редакцию 30.09.2009 г.
© Е. Г. Андреева, А. Ю. Ковалев
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Творческий конкурс на IV Интернет-олимпиаде «Нанотехнологии — прорыв в будущее!»
Впервые центральное российское телевидение, передача «Доброе утро, Россия!» в рамках уникального творческого конкурса на IV Интернет-олимпиаде «Нанотехнологии — прорыв в будущее!» отберет лучших учас тников, которые смогут рассказать телезрителям свою «историю успеха» в области высоких технологий (нанотехнологий).
У Вас будет реальный шанс поведать о себе, Ваших коллегах и своей работе миллионам зрителей на канале, который, по мнению экспертов, является одним из самых объективных в освещении развития нанотехнологий в России. Конкурс проводит творческая группа, имеющая богатейший опыт работы в этой области. Участники данного творческого конкурса должны удовлетворять нескольким несложным «квалификационным требованиям», соблюдение которых будет контролироваться советниками творческой группы программы «Доброе утро, Россия!» — членами жюри олимпиады из МГУ им. М. В. Ломоносова.
Если Вы студент, аспирант, молодой ученый, опубликовавший выдающуюся статью или победивший в престижном конкурсе, если Выи Ваши коллеги — интересные люди, которым есть что рассказать и показать миллионам зрителей России, то это — Ваш конкурс! Расскажите миллионам о Ваших открытиях, исследованиях, достижениях, образцах!
Задание творческого тура программы «Доброе утро, Россия!» для всех участников Интернет-олимпиады: «Нанотехнологии 20 лет спустя».
«Перенесемся на 20 лет в будущее и представим, что Вы теперь — выдающийся и известный во всем мире ученый, исследователь в области нанотехнологий. Сегодня — Вы гость в студии программы «Доброе утро, Россия!». Главная тема интервью: «Важные открытия последних лет и самые интересные изобретения, связанные с ними».
Напишите это интервью. Какие вопросы задавали (бы) наши ведущие, и что (бы) Вы отвечали. Время в эфире — 5 минут (примерно 2,5 страницы текста 14 кеглем Times New Roman). Придумайте и опишите, что Вы могли бы показать «материального» во время этого интервью (образцы, устройства и пр.).
Количество победителей — не более двух. Авторы-победители станут героями сюжета программы «Доброе утро, Россия!» на телеканале «Россия».
Критерии оценки: соответствие работы заданию и предложенной тематике конкурса (5 баллов), оригинальность (5 баллов), творческий подход (5 баллов), здравый смысл (5 баллов).