Электрические машины — Регулирование частоты вращения асинхронных двигателей
Асинхронные двигатели являются основой современного электропривода переменного тока. Эффективность работы этого электропривода во многом определяется возможностями регулирования частоты вращения.
Возможности асинхронных двигателей в отношении регулирования частоты вращения ротора определяются выражением
.
Из этого выражения следует, что частоту вращения можно регулировать тремя способами: путем изменения частоты , числа пар полюсов p и скольжения s. Рассмотрим каждый из этих способов подробнее.
Регулирование частоты вращения изменением частоты подводимого напряжения
Этот способ является в настоящее время наиболее перспективным. Изменение частоты осуществляется с помощью полупроводникового преобразователя частоты (рис. 4.28, а). Одновременно с изменением частоты регулируют и напряжение , так чтобы обеспечить постоянство магнитного потока . Из выражения, связывающего напряжение с потоком Ф,
,
следует, что напряжение необходимо регулировать пропорционально частоте
.
Отклонение от этого закона приводит к изменению потока Ф, что нежелательно. Действительно, при увеличении потока возрастает насыщение магнитной цепи, растут потери в стали и намагничивающий ток. Уменьшение потока вызывает уменьшение максимального момента двигателя и ряд других нежелательных явлений.
При механические характеристики двигателя имеют показанный на рис. 4.28, б вид. При снижении частоты пусковой момент двигателя возрастает, а максимальный несколько снижается. Рабочее скольжение двигателя остается небольшим, что характеризует экономичный режим работы двигателя. Однако стоимость этого способа регулирования частоты вращения двигателя весьма высока, так как преобразователь частоты должен быть выполнен на полную мощность двигателя.
Регулирование частоты вращения изменением числа пар полюсов
Этот способ регулирования в отличие от предыдущего позволяет осуществить изменение частоты вращения только ступенями. Он используется в таких механизмах, как воздуходувки, транспортеры, подъемники, лифты. Двигатели с переключением числа пар полюсов называют многоскоростными. Обычно многоскоростные асинхронные двигатели выполняются с двумя, тремя и четырьмя ступенями скоростей. Двухскоростные двигатели изготавливаются с одной обмоткой, если числа пар полюсов соответствуют следующему отношению:
.
Трех- и четырехскоростные двигатели выпускаются с двумя обмотками. В трехскоростных двигателях только одна обмотка выполняется с переключением числа пар полюсов , а в четырехскоростных обе обмотки выполняются как двухскоростные. Обмотка ротора многоскоростных двигателей выполняется короткозамкнутой. Для нее не требуется переключения схемы соединения, так как необходимое число пар полюсов обмотки ротора образуется автоматически полем статора.
Изменение числа полюсов осуществляется путем изменения схемы соединения секций обмотки статора. На рис. 4.29 показаны три варианта соединения секций.
Вариант «а» соответствует последовательному согласному включению секций, при этом образуется магнитное поле с полюсами. В варианте «б» вторая секция включается встречно-последовательно. Результирующее поле имеет полюса. Мощность обмотки остается неизменной, , а момент, развиваемый двигателем, снижается в два раза, . В варианте «в» вторая секция включается встречно-параллельно. Результирующее поле также будет иметь полюса, но мощность обмотки возрастает в два раза, а момент двигателя остается постоянным .
Таким образом, для изменения числа пар полюсов в отношении необходимо, чтобы каждая фаза обмотки состояла из двух одинаковых частей. Когда обе части обтекаются токами одинакового направления, число полюсов , при изменении направления тока в одной из них число полюсов уменьшается вдвое, . При переключении числа полюсов с на полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).
Так как чередование фаз для обеих скоростей должно оставаться одинаковым, то кроме изменения направления токов в зонах необходимо поменять местами две фазы обмотки. При большем числе полюсов обмотка выполняется с диаметральным шагом . Тогда при меньшем числе полюсов .
Малый шаг приводит к ухудшению использования обмотки и, следовательно, к некоторому снижению технико-экономических показателей двигателя.
Многоскоростные двигатели проектируются для различных режимов работы. Наиболее часто встречаются режимы с постоянным моментом и с постоянной мощностью . Регулирование частоты вращения с постоянным моментом обеспечивается при переключении обмотки со звезды на схему двойной звезды (рис. 4.31).
При таком переключении в два раза возрастает потребляемый из сети ток, а следовательно, и мощность двигателя , момент же при этом не меняется.
Если до переключения обмотка статора была соединена в треугольник (рис. 4.32), то после переключения ее на двойную звезду мощность двигателя практически не изменится, а момент уменьшится в два раза из-за увеличения частоты вращения.
Регулирование частоты вращения изменением скольжения
Изменять скольжение асинхронного двигателя можно разными способами: изменением подводимого к статору напряжения, введением сопротивления в цепь ротора или введением в цепь ротора дополнительной ЭДС.
При изменении напряжения статора механическая характеристика двигателя изменяется, как показано на рис. 4.33. Снижение напряжения приводит к уменьшению жесткости механической характеристики и росту скольжения. При этом частота вращения ротора снижается,
.
Регулирование частоты вращения таким способом возможно в ограниченном диапазоне изменения скольжения
.
Основным недостатком этого способа регулирования частоты вращения является низкий КПД из-за роста потерь в обмотке ротора пропорционально частоте скольжения
.
Поэтому он применяется только для двигателей малой мощности, работающих в системах автоматического управления.
В двигателях с фазным ротором изменить частоту вращения можно путем изменения сопротивления в роторе (рис. 4.34).
Преимущество данного способа регулирования частоты состоит в том, что максимальный момент остается неизменным. Важно также отметить, что часть потерь двигателя выносится в резистор, тем самым облегчается тепловой режим двигателя. В остальном способ аналогичен предыдущему и характеризуется низким КПД., малым диапазоном регулирования, зависящим от нагрузки, и «мягкой» механической характеристикой.
Чтобы повысить КПД двигателя при регулировании частоты вращения путем изменения скольжения, необходимо мощность скольжения использовать для совершения полезной работы или возвратить обратно в сеть. Схемы, реализующие эту идею, называются каскадными. Одной из распространенных схем данного типа является схема асинхронно-вентильного каскада (рис. 4.35).
Схема включает асинхронный двигатель с фазным ротором (АД), диодный выпрямитель (Д), сглаживающий дроссель (Др), тиристорный инвертор (И) и сетевой согласующий трансформатор (Тр). Регулирование частоты вращения осуществляется посредством изменения напряжения инвертора. Это приводит к соответствующему изменению напряжения обмотки ротора, а следовательно, и частоты вращения ротора. Мощность частоты скольжения, извлекаемая из роторной обмотки двигателя, передается в сеть через согласующий трансформатор.
Достоинством каскадных схем регулирования частоты вращения асинхронных двигателей по сравнению с частотными схемами управления в статорной цепи (рис. 4.28) является то, что полупроводниковый преобразователь выполняется на мощность скольжения, а не на полную мощность двигателя. Это обстоятельство особенно важно для мощных и сверхмощных приводов насосов, прессов, конвейеров, подъемных механизмов и др., где требуется ограниченный диапазон регулирования частоты вращения (2:1 и менее).
Асинхронно-вентильный каскад с неуправляемым выпрямителем допускает регулирование только вниз от синхронной частоты вращения. Если использовать управляемый выпрямитель, то можно осуществить регулирование частоты вращения вверх от синхронной. В этом случае направление передачи мощности скольжения меняется на противоположное.
Регулирование частоты вращения асинхронного двигателя изменением числа полюсов в обмотке статора
Регулирование частоты вращения асинхронного двигателя изменением числа полюсов в обмотке статора обеспечивается благодаря изменению частоты вращения магнитного поля статора. Как следует из формулы (3), при неизменной частоте питающей сети частота вращения магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов. Так как число полюсов, фиксированное ступенями, может быть равно 2, 4, 6, 8, 10 и т. д., что при частоте питающей сети, равной 50 Гц, соответствует синхронной частоте вращения 3000, 1500, 1000, 750, 600 об/мин и т. д., то указанным способом может быть обеспечено только ступенчатое регулирование.
Изменение числа пар полюсов обычно достигается следующими способами:
1. На статоре двигателя укладываются две электрически не связанные между собой обмотки, имеющие разное число пар полюсов, например р1 и р2. При подключении одной из обмоток к сети переменного тока, например, с числом полюсов р2 асинхронный двигатель будет иметь синхронную частоту вращения, соответствующую данному числу полюсов (рис. 27, а):
Другая обмотка при этом обесточена. При необходимости получения другой частоты вращения n1 обмотка с числом полюсов р2 отключается и включается с числом полюсов р1. Такие асинхронные двигатели получили название двухобмоточных.
2. На статоре укладывается одна обмотка, допускающая переключение на разное число полюсов. Наиболее широко распространены две схемы переключения статорной обмотки двухскоростных двигателей: с треугольника на двойную звезду Д/УУ и со звезды на двойную звезду У/УУ (звезду с двумя параллельными ветвями).
Схемы соединения обмоток Д/УУ применяются для получения примерно одинакового вращающего момента при обеих частотах вращения (рис. 27,а). Такие схемы применяются, например, у асинхронных двигателей привода компрессоров, металлорежущих станков и др. Схемы соединения обмоток У/УУ используются для приводов вентиляторов (рис. 27, б).
Рис. 27. Механические характеристики при регулировании частоты вращения асинхронных двигателей изменением числа пар полюсов при переключении статорной обмотки: а — треугольник (число пар полюсов p=p1) — двойная звезда (р=р2); б — звезда (p=р1) — двойная звезда (р=р2)
Кроме рассмотренных вариантов двухскоростных асинхронных двигателей нашли применение трехскоростные и четырехскоростные двигатели. В трехскоростных двигателях размещаются одна переключаемая и одна непереключаемая обмотка, а в четырехскоростных — две переключаемые обмотки, позволяющие получить четыре синхронные частоты вращения, например 3000/1500/1000/500 об/мин.
Двигатели с переключением числа пар полюсов, как правило, имеют короткозамкнутый ротор с обмоткой типа беличьей клетки. Такой ротор обеспечивает возможность работы без дополнительных пересоединений в его цепи. В случае фазного ротора в многоскоростных двигателях потребовалось бы производить переключения одновременно на статоре и роторе, что усложнило бы конструкцию ротора и эксплуатацию таких машин.
Электродвигатели с короткозамкнутым ротором могут иметь ряд специфических ненормальностей из-за неправильного соотношения числа пазов статора z1, ротора z2 и числа полюсов 2р.
Ненормальности заключаются в том, что двигатель может «прилипать», т. е. не приходить во вращение при подключении к сети, или «застревать», т. е., начав вращаться, останавливаться при некоторой частоте вращения, или при вращении сильно гудеть.
Во избежание указанных явлений должны быть выдержаны следующие соотношения:
где k — любое целое число от одного до четырех.
Здесь же следует заметить, что изменение числа полюсов может иметь место не только при регулировании частоты вращения асинхронного двигателя способом изменения его полюсности, но и при ремонте, связанном с изменением номинальной частоты вращения.
К положительным показателям многоскоростных асинхронных двигателей следует отнести экономичность и относительно большой диапазон регулирования частоты вращения ротора. Недостатком данного способа регулирования является указанная выше невозможность плавного изменения частоты вращения.
Как отмечалось, в рамках единой общепромышленной серии асинхронных двигателей 4А выпускается модификация многоскоростных двигателей, предназначенных для работы на двух, трех или четырех скоростях.
Однообмоточные двигатели выпускаются на следующие соотношения частот вращения: 1500/3000, 750/1500, 1000/1500, 750/1000, 500/1000 об/мин. Двухобмоточные (трехскоростные) имеют соотношения 1000/1500/3000, 750/1500/3000, 750/1000/1500 об/мин, двухобмоточные (четырехскоростные) —750/1000/1500/3000, 500/750/1000/1500 об/мин.
В обозначении многоскоростных двигателей приводят все числа полюсов, на которые переключаются обмотки. Например, четырехскоростной асинхронный двигатель на 500/750/1000/1500 об/мин (2р= 12/8/6/4) обозначается 4А200М12/8/6/4УЗ.
Общие сведения об электрических машинах — Изменение скорости вращения путем изменения первичного напряжения и другие
Скорость вращения двигателя можно регулировать путем изменения (уменьшения) напряжения на его зажимах. Это основано на зависимости M = f(s) (185), которую, предполагая постоянными параметры двигателя и неизменной частоту приложенного напряжения в пределах по s 
На рисунке 176 даны кривые вращающих моментов двигателя при различных значениях первичного напряжения; если скольжение s1 соответствует работе двигателя при напряжении.

Рис. 176. Механические характеристики асинхронного двигателя при различных величинах напряжения.
Как видно, диапазон регулирования скорости вращения, равной (1—s), весьма невелик. Расширение диапазона регулирования получается при более пологих механических характеристиках, то есть в двигателях с большим значением sK. Но следует помнить, что потери, возникающие во вторичной цепи, равны мощности скольжения [см. формулу (159)]. К недостаткам относится также и то, что при
снижении напряжения пропорционально его квадрату падает перегрузочная способность двигателя. К достоинствам этого способа относятся возможность применения его к короткозамкнутым двигателям, плавное регулирование скорости вращения, простота и надежность в работе. Напряжение на зажимах двигателя при неизменном напряжении сети изменяют при помощи установленных между сетью и статором двигателя регулируемого автотрансформатора или управляемых дросселей насыщения. При изменении значения постоянного тока подмагничивания индуктивное сопротивление дросселей изменяется, что вызывает изменение напряжения на зажимах двигателя.
Ухудшение охлаждения самовентилируемых двигателей при снижении скорости вращения приводит к необходимости повышать номинальную мощность двигателя (увеличивать габарит регулируемого двигателя по сравнению с нерегулируемым). Степень завышения мощности зависит от формы механической характеристики двигателя (ее пологости в области рабочих режимов), вида статической нагрузки и диапазона регулирования.
Выбор электродвигателя по мощности, дросселей насыщения или автотрансформатора для регулируемого привода представляет собой самостоятельный вопрос, рассматриваемый в курсах электропривода и в периодической литературе.
Способы регулирования скорости вращения изменением напряжения перспективны прежде всего для приводов с вентиляторной характеристикой момента, механизма или постоянным моментом, но при малом диапазоне регулирования. Такие приводы достаточно распространены в сельскохозяйственном производстве.
Метод регулирования скорости вращения изменением напряжения применяется также для двигателей с фазным ротором, причем в этом случае для получения более пологих механических характеристик двигателя в цепь ротора включают добавочные сопротивления.
Другие способы регулирования скорости вращения
Рассмотренные способы регулирования скорости вращения можно отнести к наиболее распространенным. Из возможных других можно назвать способ регулирования скорости вращения двигателя с фазным ротором при включении в цепь ротора индуктивных сопротивлений, наглухо присоединенных к цепи ротора и размещенных на одном валу с ним (двигатель Розова, рис. 178), а также способ импульсного регулирования. При импульсном регулировании непрерывно включают двигатель в сеть и отключают его от сети или при помощи контактора К шунтируют сопротивления, включенные между сетью и статором двигателя (рис. 179).
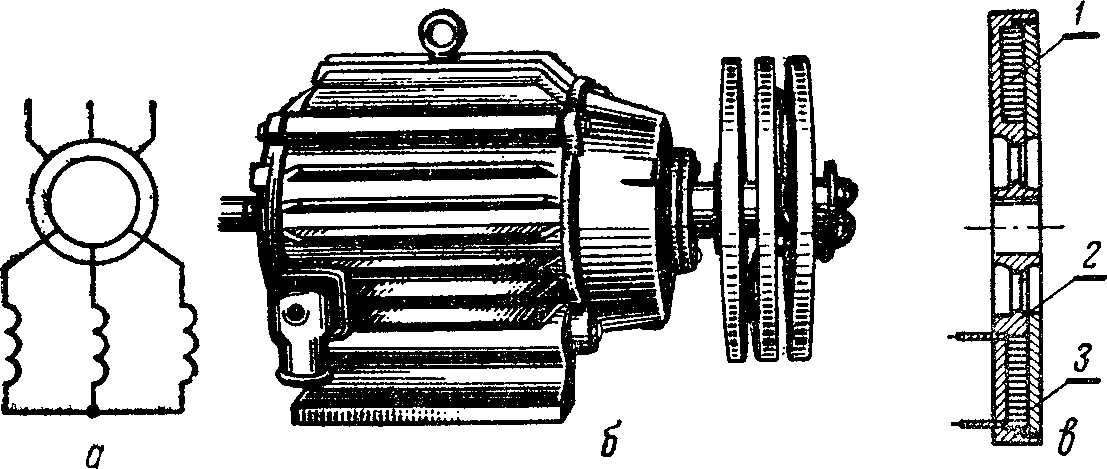
Рис. 178. Двигатель с индуктивными сопротивлениями в роторе:
а — электрическая схема; б — внешний вид; в — конструкция индуктивного сопротивления; 1 — катушка; 2 — корпус диска; 3 — крышка.

Рис. 179. Схема импульсного регулирования скорости вращения асинхронного двигателя.
В зависимости от частоты и продолжительности импульсов двигатель работает с некоторой приблизительно постоянной скоростью вращения. Регулирование сопряжено с ухудшением энергетических показателей, сопровождается толчками токов и применяется только для двигателей весьма малой мощности.
Регулирование частоты вращения асинхронных двигателей

Регулирование частоты вращения двигателей определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых они используются. Оно характеризуется следующими основными показателями.
Диапазон регулирования Д (предел изменения частоты вращения). Под этой величиной понимается отношение максимальной частоты вращения двигателя к его минимальной частоте вращения.
Плавность регулирования, которая характеризуется минимальным скачком частоты вращения двигателя при переходе с одной механической характеристики на другую.
Направление возможного изменения частоты вращения двигателя (зона регулирования).
При номинальных условиях работы (напряжении и частоте питающей сети) двигатель имеет естественную механическую характеристику. При регулировании частоты вращения соответствующие им характеристики будут отличаться от естественной. Эти характеристики носят название искусственных (регулировочных) характеристик. С помощью одних методов регулирования удается получить искусственные характеристики, располагающиеся только ниже естественной. Другие методы обеспечивают регулирование частоты вращения выше и ниже естественной характеристики. Экономичность регулирования определяется по дополнительным капитальным затратам, необходимым при создании регулировочных устройств, а также по потерям электроэнергии при регулировании.
Следует отметить, что в ряде случаев, например для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др.). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
Допустимая нагрузка двигателя при работе его на регулировочных характеристиках ограничивается величинами токов в статорной и роторных цепях. Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Регулирование частоты вращения асинхронных двигателей может производиться способом воздействия на него со стороны статора или со стороны ротора. Все три способа нашли широкое применение на практике. Рассмотрим эти способы подробнее.
Регулирование частоты вращения изменением частоты питающей сети является наиболее экономичным способом регулирования и позволяет получить хорошие механические характеристики электропривода. При изменении частоты питающей сети обеспечивается изменение частоты вращения магнитного поля асинхронного двигателя. Источник питания двигателя должен осуществлять преобразование напряжения стандартной частоты сети 50 Гц в напряжение с требуемой частотой. Одновременно с изменением частоты должна регулироваться по определенному закону и величина подводимого к двигателю напряжения, чтобы обеспечить высокую жесткость механической характеристики и требуемую перегрузочную способность двигателя. При регулировании частоты вращения асинхронных двигателей изменением частоты питающей сети можно обеспечить различные режимы работы: с постоянным вращающим моментом; с постоянной мощностью на валу; с моментом, пропорциональным квадрату частоты.
Зависимости между регулируемыми напряжением и частотой с учетом влияния активного сопротивления статора, изменения жесткости механических характеристик, насыщения стали, ухудшения теплоотдачи на низких частотах вращения ротора двигателя имеют довольно сложный характер. В качестве источника питания могут применяться электромашинные вращающиеся преобразователи, использующие электрические машины, или статические преобразователи частоты на полупроводниковых приборах, которые серийно выпускает промышленность. Положительным свойством частотного регулирования является возможность плавного регулирования в широком диапазоне в обе стороны от естественной характеристики (в том числе возможно вращение двигателя с частотой, большей номинальной). При регулировании обеспечивается жесткость характеристик и высокая перегрузочная способность. Однако в ряде случаев в приводах металлообрабатывающих станков, электрошпинделей, мощных воздуходувок и других механизмов частотное регулирование является наиболее приемлемым.
Регулирование частоты вращения изменением числа полюсов в обмотке статора обеспечивается благодаря изменению частоты вращения магнитного поля статора. При неизменной частоте питающей сети частота вращения магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов. Так как число полюсов, фиксированное ступенями, может быть равно 2, 4, 6, 8, 10 и т. д., что при частоте питающей сети, равной 50 Гц, соответствует синхронной частоте вращения 3000, 1500, 1000, 750, 600 об/мин и т. д., то указанным способом может быть обеспечено только ступенчатое регулирование.
Кроме двухскоростных асинхронных двигателей нашли применение трехскоростные и четырехскоростные двигатели. В трехскоростных двигателях размещаются одна переключаемая и одна непереключаемая обмотка, а в четырехскоростных — две переключаемые обмотки, позволяющие получить четыре синхронные частоты вращения, например 3000/1500/1000/500 об/мин. Двигатели с переключением числа пар полюсов, как правило, имеют короткозамкнутый ротор с обмоткой типа беличьей клетки. Такой ротор обеспечивает возможность работы без дополнительных пересоединений в его цепи. В случае фазного ротора в многоскоростных двигателях потребовалось бы производить переключения одновременно на статоре и роторе, что усложнило бы конструкцию ротора и эксплуатацию таких машин. К положительным показателям многоскоростных асинхронных двигателей следует отнести экономичность и относительно большой диапазон регулирования частоты вращения ротора. Недостатком данного способа регулирования является указанная выше невозможность плавного изменения частоты вращения.
Как отмечалось, в рамках единой общепромышленной серии асинхронных двигателей 4А выпускается модификация многоскоростных двигателей, предназначенных для работы на двух, трех или четырех скоростях. Регулирование частоты вращения изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании.
Регулирование скольжения можно осуществлять как со стороны статора, так и со стороны ротора. Естественно, что во втором случае ротор должен быть фазным и иметь выведенную на контактные кольца обмотку. При регулировании со стороны статора изменяют приложенное к его обмотке напряжение. Увеличение напряжения сверх номинального приводит к насыщению магнитной цепи двигателя и потому не применяется.
Для регулирования частоты вращения уменьшают напряжение питания. При этом развиваемый двигателем момент изменяется пропорционально квадрату напряжения и соответственно изменяются механические характеристики двигателя, в результате чего изменяются и значения рабочих скольжений. При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). При этом важно заметить, что изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента. Таким образом, перегрузочная способность двигателя при регулировании не снижается.
Статьи по теме:
| Подготовка и пуск электродвигателя. Установке электродвигателя для эксплуатации предшествует выбор места этой установки. При этом необходимо учесть следующее: а) место установки двигателя должно исключить возможность попадания на его обмотки и токосъемные устройства воды, масла, эмульсии и т. п. . >>> |
| Выбор асинхронных двигателей для работы с приводимыми механизмами. Процесс выбора состоит в удовлетворении ряда требований потребителя и заключается в переборе возможных вариантов, в том числе: по напряжению и частоте вращения; по конструктивному исполнению; по уровню вибрации и шума; по мощности и режиму работы . >>> |
| Выбор схемы пуска асинхронных и синхронных двигателей. Выбор простой и надежной схемы пуска имеет большое значение для эксплуатации двигателей и синхронных компенсаторов. Наиболее распространенной в настоящее время является простейшая и вместе с тем наиболее надежная схема прямого пуска от полного напряжения сети . >>> |