Какие функции выполняют различные элементы сау
13. Системы автоматического регулирования
Все рисунки, за исключением рис.102, выполнены автором .
Системы автоматического регулирования (САР) применяются для регулирования отдельных параметров (температура, давление, уровень, расход и т.д.) в объекте управления. В современных системах автоматического управления (САУ) системы автоматического регулирования являются подсистемами САУ и их применяют для регулирования различных параметров при управлении объектом или процессом.
Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения.
Для осуществления автоматического регулирования к регулируемому объекту подключается автоматический регулятор, вырабатывающий управляющее воздействие на регулирующий орган. Это управляющее воздействие вырабатывается регулятором в зависимости от разности между текущим значением регулируемой величины (температуры, давления, уровня жидкости и т. д.), измеряемой датчиком, и желаемым её значением, устанавливаемым задатчиком. Регулируемый объект и автоматический регулятор вместе образуют систему автоматического регулирования.
Основным признаком САР, является наличие главной обратной связи, по которой регулятор контролирует значение регулируемого параметра.
Пример системы регулирования температуры
На Рис. 87 показана блок схема системы регулирования температуры в объекте, а на Рис. 88 функциональная схема САР, показывающая общий принцип работы любой системы автоматического регулирования.
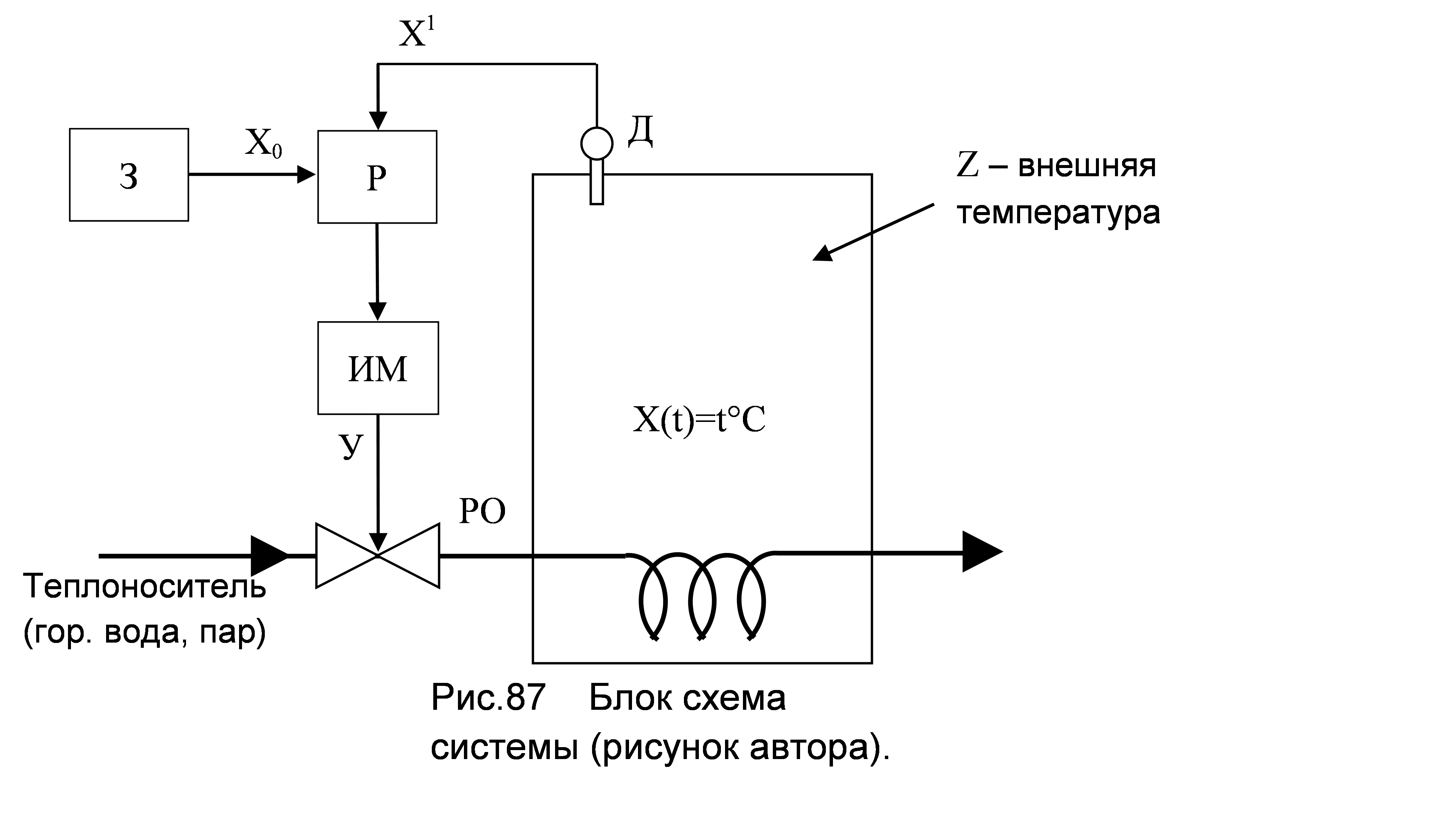
Если температура в объекте равна заданной, то сигнал с датчика X 1 равен сигналу с задатчика X0 и сигнал ошибки на входе регулятора е = X 1 — X0 = 0 QUOTE , сигнала на выходе регулятора нет, ИМ не работает и клапан открыт на заданную величину, поддерживая заданную температуру. Если, например, температура в объекте увеличиться, увеличиться сигнал с датчика X 1 , возникнет ошибка «е», заработает ИМ и, прикроет клапан РО для уменьшения подачи тепла, температура в объекте уменьшится до заданной.
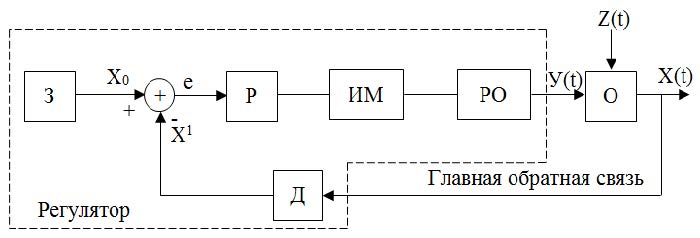
Рис. 88 Функциональная схема САР
З – задатчик, для установки заданного значения параметра X0
Д – датчик (термопара, терморезистор, датчик уровня, скорости и др. для разных систем)
ИМ – исполнительный механизм (эл. мотор с редуктором, пневмоцилиндры и др.)
РО – регулирующий орган (кран, вентиль, заслонка и др.)
О – объект регулирования (печь, эл. мотор, резервуар и др.)
У – регулирующее (управляющее) воздействие
Z – помеха (возмущение)
Х – регулируемый параметр
X 1 – сигнал на выходе датчика
е = X 1 — X0 ошибка, возникает при отклонении параметра от задания
X0 – заданное значение регулируемого (управляемого) параметра может быть постоянным X0 или изменяемым (Ut).
Сигнал с задатчика может быть:
-постоянным X0 = const . для поддержание постоянства регулируемого параметра температуры, давления, уровня жидкости и т. д. (системы стабилизации);
-может изменяться во времени U(t) по определённой программе (программное регулирование);
-может изменяться во времени U(t) в соответствии с измеряемым внешним процессом (следящее регулирование).
Контрольные вопросы
1.От каких воздействий может измениться регулируемый параметр?
2.Как действует обратная связь, и для чего она нужна?
3.Какие функции выполняют Д и ИМ?
4.Как действует система при возникновении ошибки «е»?
5.Приведите пример системы стабилизации и следящей системы?
1.Основные функции, выполняемые сау
В СУЭП, САУ классифицируются по основным функциям, которые выполняют в производственном процессе.
1.Автоматический разгон, торможение, реверс ЭД, поддержание скорости вращения с невысокой точностью, Не предполагается применение специальных мер, обеспечивающих формирование оптимальных переходных процессов. К САУ выполняющим первую функцию, относят релейно-контакторные устройства, однако ее могут выполнять и более совершенные САУ, например бесконтактные.
Область применения: привода механизмов металлообрабатывающей, металлургической и др. отраслей промышленности. Токарные, фрезерные и шлифовальные станки, вентиляторы, насосы и др.
2.Автоматическое задание и поддержание заданной скорости вращения или другой переменной с высокой точностью в статике и динамике. Эта функция обычно выполняется при помощи замкнутых САУ, которые могут обеспечить бОльшую точность поддержания постоянства заданной переменной, чем разомкнутые системы. Эти САУ одновременно обеспечивают требуемый характер переходных процессов при различных возмущениях. Область применения: подачи точного шлифовального станка, моталки стана холодной прокатки и др.
3.Слежение за вводимыми в систему сигналами. Здесь обычно имеется ввиду, что при любом заранее на заданном движении входной оси во времени выходная ось(ось двигателя или нагрузки) повторяет это движение, или следит за выходной. Возможной слежение за угловыми и линейными перемещениями, температурой, количеством воды и др. Следящие систем имеют замкнутую структуру. Область применения: ЭП метало обрабатывающей и др. отраслей промышленности. Сюда относят: летучие ножницы и нажимные устройства прокатных станков и др.
4.Программное автоматическое управление машинами и механизмами. Производство часто требует автоматического управления отдельными машинами и комплексами машин по заранее заданной программе. Здесь возможна работа как замкнутых так и разомкнутых систем. Область применения:продольно строгальные, токарные, расточные и др. станки.
5.Автоматическое управление промышленными механизмами и комплексами машин, обеспечивающее автоматический выбор целесообразных режимов работы. Эта функция выполняется адаптивными САУ, в которых широко используется элементы и устройства вычислительной техники. Область применения:Фрезерные и шлифовальные станки, токарные автоматы, автопилоты и др.
6.Автоматическое управление комплексами машин и механизмов, объединенных общим тех.процессом. Являются устройствами комплексной автоматизации. Комплексная автоматизация предполагает выполнение устройствами наиболее сложных функций управления, которые раньше выполнялись человеком часто с большим напряжением физических сил, умственных способностей и памяти. Системы выполняющие шестую функцию могут выполнять все предыдущие. В них например могут применяться следящие системы, системы автоматического программного управления и др.
Какие функции выполняют различные элементы сау
Основные определения, термины
и понятия по военно-технической подготовке
- Военно-техническая подготовка
- Тактитка зенитных ракетных войск
- Боевое применение зенитного ракетного комплекса
6.1. Системы автоматического управления
6.1.1. Принципы автоматического управления
Система, в которой все рабочие и управленческие операции выполняются без непосредственного участия человека, называется системой автоматического управления (САУ). Если же часть операций выполняется людьми, то говорят об автоматизированной системе управления (АСУ).
В основу построения САУ положены общие принципы управления, реализация которых позволяет увязать заданный алгоритм функционирования с фактическим состоянием системы. К ним относятся:
— принцип управления по задающему воздействию;
— принцип управления путем компенсации возмущения (помехи);
— принцип управления с учетом обратной связи;
— принцип комбинированного управления.
Суть первого из них, называемого также принципом разомкнутого управления, состоит в том, что управляющий сигнал U(t) формируется путем функционального преобразования входного сигнала X(t) без учета значения сигнала на выходе системы:
САУ, реализующая подобный принцип, называется разомкнутой .
При использовании второго принципа управляющий сигнал U(t) формируется с учетом возмущающего воздействия f(t), то есть помехи. Этот принцип обеспечивает более гибкое управление, но применим лишь в том случае, когда помеху можно измерить. Специальное устройство, воспринимающее помеху, не только определяет ее параметры, но и формирует дополнительный сигнал, подаваемый на объект управления. Алгоритм управления в данном случае содержит информацию как о задающем, так и о возмущающем воздействии:
Принцип управления по обратной связи обеспечивает формирование управляющего воздействия U(t) с учетом фактического значения выходного сигнала Y(t), часть которого в виде контрольного сигнала Z(t) возвращается на вход системы. Его называют также принципом замкнутого управления или принципом управления по замкнутому контуру . Его алгоритм может быть представлен в следующем виде:
В САУ, реализующих подобный принцип, автоматическое управляющее устройство стремиться ликвидировать все отклонения выходного сигнала Y(t) от желаемого значения независимо от причин, вызвавших эти отклонения, включая любые внешние помехи f(t), а также изменения параметров самой системы.
Поэтому такие системы нашли широкое распространение в технике, а понятие об обратной связи является одним из основных в автоматике и кибернетике.
Комбинированное управление представляет собой сочетание принципов управления по разомкнутому и замкнутому циклам одновременно.
6.1.2. Классификация систем автоматического управления
Классификация систем автоматического управления (САУ) осуществляется по наиболее важным их свойствам.
В зависимости от цели управления различают стабилизирующие, программные и следящие системы.
Стабилизирующей называется автоматическая система, алгоритм которой обеспечивает поддержание управляемой величины на постоянном уровне. Примерами могут служить регуляторы скорости, напряжения, температуры, самолетные автопилоты, системы автоматического управления частотой автогенераторов, автоматической регулировки усиления и др.
Программной называется автоматическая система, алгоритм которой изменяет управляемую величину в соответствии с заранее заданной функцией. Примерами являются различные тренажеры, станки с числовым программным управлением, системы слепой посадки самолетов, автономного управления полетом ракеты на начальном участке траектории и др.
Следящей называется автоматическая система, алгоритм которой изменяет выходной сигнал в зависимости от значения неизвестного заранее переменного сигнала на входе. На этом принципе построены системы автосопровождения целей по дальности, скорости и направлению, силовые следящие системы управления положением антенн и пусковых установок ракет, радиотехнические системы телеуправления и самонаведения ракет и т.д.
По источнику управляющего сигнала различают замкнутые и разомкнутые САУ.
САУ, в которой управляющий сигнал U(t) вырабатывается только на основе внешних сигналов, называется системой с разомкнутой цепью управления.
Если же сигнал U(t) формируется с учетом как внешних, так и внутренних сигналов, то система называется замкнутой . В подобных системах управляющий сигнал чаще всего вырабатывается в результате сравнения выходной величины Y(t) с задающим сигналом X(t):
U(t) = e(t) = F[X(t) — Y(t)].
Такой способ управления называется управлением по отклонению (по ошибке, рассогласованию). Сами же системы называются системами автоматического регулирования (САР).

Рис. 1. Функциональная схема САР
В замкнутых САУ в зависимости от типа обратной связи различают системы с положительной обратной связью , усиливающие входное воздействие и системы с отрицательной обратной связью , компенсирующие входное воздействие.
В зависимости от наличия или отсутствия ошибки в установившемся (статическом) режиме работы САУ подразделяются на статические и астатические.
В САУ, обеспечивающих управление не только по значению исследуемого параметра, но и по его производным, в зависимости от порядка отрабатываемых производных различают САУ различного порядка астатизма:
САУ с астатизмом первого порядка обеспечивает управление по параметру и его первой производной;
САУ с астатизмом второго порядка обеспечивает управление по параметру и его первой и второй производным;
6.1.3. Следящие системы
Следящей системой (СС) называется система автоматического управления, алгоритм которой изменяет выходной сигнал в зависимости от значения неизвестного заранее переменного сигнала на входе. На этом принципе построены системы автосопровождения целей (ракет) по дальности, скорости и направлению, силовые следящие системы управления положением антенн, радиотехнические системы телеуправления и самонаведения ракет и т.д.
При следящем измерении координат в радиолокационных измерителях используется дискретная замкнутая САУ с астатизмом второго порядка и отрицательной обратной связью .
В дискретной СС с периодом обращение к объекту Т уравнение движения цели по произвольной координате x имеет вид:
xn = xn-1 + x’n∙T + 1/2∙x»n∙T2, (1)
где: xn – истинное значение координаты в текущем такте n;
x’n = (xn – xn-1)/Т– скорость ее изменения;
x»n = (x’n – x’n-1)/Т – ускорение .
Экстраполированное (ожидаемое) значение координаты определяется как:
xn э =  n-1 +
n-1 +  ‘n-1∙T, (2)
‘n-1∙T, (2)

где: n-1 — измеренное значение координаты, хранится в памяти СС;

‘n-1 — измеренная скорость ее изменения, хранится в памяти СС.
Ожидаемое значение координаты определено с ошибкой Δxn:

Δxn = xn — xn э = (x’n — ‘n-1) T + 1/2∙x»n∙T2≈ 1/2∙x»n∙T2 . (3)
Приближенное равенство в (3) обусловлено тем, что выражение

(x’n — ‘n-1) стремится к нулю при малых значениях T и x».

Измеряя в текущем периоде обращения к объекту значение Δxn, именуемое сигналом ошибки (СО), СС рассчитывает текущее измеренное значение координаты n:

n = xn э + Δx. (4)
Таким образом, рекуррентный алгоритм (4) измерения координат целей СС позволяет последовательно уточнять значения оцениваемого параметра по результатам измерений сигнала ошибки в каждом периоде обращения к цели.
Структура СС, реализующий такой алгоритм, не зависит от измеряемой координаты (рис. 1).

Рис. 1. Структура следящей системы
В каждой СС присутствует измеритель сигнала ошибки, вычисляющий значение выражения (3), он называется дискриминатором и реализуется, как правило, в аналоговой форме .
Вычисление экстраполированных значений координаты в соответствии с выражением (2), текущих измеренных значений координаты в соответствии с выражением (4) и хранение измеренных значений координаты и скорости ее изменения осуществляется в формирователе сглаженных оценок , он реализуется, как правило, алгоритмически (программно) в специализированных вычислителях или в ЭВМ.
Последним элементом в составе СС является исполнительное устройство , где формируется опорный сигнал для дискриминатора со значением измеряемого параметра, определяемым кодом экстраполированной координаты.
Сигнал с выхода СС подается на ее вход для вычисления и последующей минимизации сигнала ошибки, следовательно, в рассматриваемой замкнутой САУ использована отрицательная обратная связь .
Простейшая цифровая СС.
Система уравнений, описывающая алгоритм работы СС, имеет вид:

где: К1 и К2 – коэффициенты определяющие как устойчивость работы СС, так и ее постоянную времени, а также случайные и динамические ошибки;
x0 и x’0 – начальные значения координаты и ее производной, задаваемые в режиме поиска цели.
Структурная схема цифровой следящей системы, реализующая приведенный алгоритм имеет вид, представленный на рисунке 2.

Рис. 2. Структурная схема цифровой следящей системы
На схеме дискриминатор показан как устройство вычитания. Начальные значения параметра  0 и
0 и  ‘ 0 вводятся в систему перед началом автоматического сопровождения и соответствуют моменту времени t 0 . В дискриминаторе реализуется вычисление СО. Сформированное значение сигнала ошибки домножается на коэффициенты К1 и К2 поступает на
‘ 0 вводятся в систему перед началом автоматического сопровождения и соответствуют моменту времени t 0 . В дискриминаторе реализуется вычисление СО. Сформированное значение сигнала ошибки домножается на коэффициенты К1 и К2 поступает на
фильтр оценки текущего параметра сигнала. При необходимости с выхода первого сумматора может быть снято значение оценки скорости изменения параметра х.
Полученная схема следящего измерителя представляет собой простейшую дискретную одноканальную систему автоматического управления второго порядка астатизма с отрицательной обратной связью .
В многоканальных СС для хранения полученных значений используются не линии задержки, а ячейки ОЗУ. Поскольку обращение к различным целям происходит в разные моменты времени, следящие системы по каждой из координат выполнены по схемам подобным одноканальным СС, а многоканальность достигается наличием нескольких ячеек ОЗУ (по количеству сопровождаемых целей).
6.1.4. Дискриминаторы следящих систем
Важнейшим элементом следящей системы (СС) является измеритель сигналов ошибок – дискриминатор . Для описания дискриминатора и анализа его свойств используют дискриминаторную характеристику (ДХ) (рис. 1).

Рис. 1. Дискриминаторная характеристика
ДХ описывается двумя основными параметрами:
ширина рабочего участка (размах) — Dxp;
крутизна рабочего участка S = tga.
Размах ДХ определяет максимально допустимые ошибки наведения СС.
Крутизна ДХ определяет потенциальную точность измерения координаты.
Для стабилизации точности измерения необходимо обеспечить выполнение условия S = const при любых условиях измерений.
Техническая реализация дискриминаторов, как правило, основывается на принципе суммарно-разностной обработки сигналов.
Технически для формирования ДХ, как правило, используется фазовый детектор (ФД), использующий два входных сигнала:
где U max амплитуда сигнала, ψ фаза сигнала.
Выходной сигнал ФД:
зависит от произведения амплитуд входных сигналов и косинуса разности их фаз.
6.1.5. Системы автоматического регулирования, применяемые в приемных и передающих устройствах РЛС
В радиопередающих устройствах (РПУ) РЛС системы автоматического регулирования (САР), как правило, предназначены для стабилизации частоты зондирующего сигнала.
САР приемника (РПрУ) позволяют обеспечить требуемую точность определения координат целей в пространстве.
Кроме того, системы автоматического регулирования РПрУ позволяют в автоматическом режиме (без участия человека) поддерживать требуемые значения коэффициентов усиления и фазовых сдвигов в каналах.
Точность измерения сигналов ошибок по всем измеряемым РЛС координатам напрямую зависит от настройки приемника. Количественно эту зависимость позволяет оценить дискриминаторная характеристика — UCOjD.
Для малых угловых рассогласований (jD) дискриминаторная характеристика угловой следящей системы (ССφ) выражается соотношением:
где: К ФД – коэффициент передачи фазового детектора (ФД) по напряжению;
Kφ,К Σ — коэффициент передачи по напряжению разностного и суммарного каналов;
Uo – амплитуда сигнала опорного канала;
γφ-γΣ — фазовые сдвиги в разностном и суммарном каналах;
μ — коэффициент, характеризующий суммарную диаграмму направленности антенны;
φΔ — угол между направлением на цель и равносигнальным.
Точность измерения угловых координат существенно зависит от соотношения Kj и КS, стабильности амплитуды Uo, и разности электрических длин приемных каналов (gj-gS), которые в процессе функционирования могут меняться по случайному закону.
Для повышения точности измерения необходимо обеспечить :
равенство во времени коэффициентов передачи Kj и КS,
равный фазовый сдвиг в каналах.
Аналогичные задачи возникают при обеспечении точности измерения Д. Дискриминационная характеристика СС Д имеет вид
UCOД» КФД ×(KД/КS)×Uo×Cos(gД-gS)D×Д.
Для стабилизации указанных параметров в состав РПрУ введены системы автоматического регулирования:
АРУ – автоматической регулировки усиления (Uo);
АВУ – автоматического выравнивания усиления (Kj = KД = КS);
АРФ – автоматического регулирования фазы опорного сигнала (gД=gj=gS).
АРУ, АВУ и АРФ построены по однотипным схемам, рассмотрим принцип из работы на примере АРУ.
Автоматическая регулировка усиления (АРУ) обеспечивает стабильность уровня сигнала на выходе усилителя при изменении уровня входного сигнала. В современных приёмниках уровень входного сигнала может изменяться в широких пределах: от 60 дБ в приёмниках радиосвязи и до 120 дБ в радиолокационных. Нормальная работа аппаратуры требует, чтобы изменения выходного сигнала приёмника не превышали 4-6 дБ. Для выполнения этих требований глубина регулировки усилителя системой АРУ должна составлять 56-116 дБ.
В зависимости от решаемых АРУ задач рассматривают:
— быстрые АРУ (БАРУ) для защиты приемника от мощных помеховых сигналов;
— шумовые АРУ (ШАРУ) — для регулирования уровня усиления приемника по шумовому сигналу;
— АРУ измерительных радиолокационных приемников для обеспечения точности измерений координат.
Систему АРУ измерительного приемника рассмотрим на примере РПрУ РЛС с КППРИ. АРУ представляет собой цифровую САР с астатизмом 1-го порядка.
Задача системы АРУ – стабилизировать выходной сигнал главного усилителя приемника точно на значении Uo.
Дискриминатором в АРУ служат: фазовый детектор (ФД), работающий в режиме амплитудного детектора, преобразователь напряжения в цифровой код (ПНК) и логарифмический преобразователь. ФД позволяет измерить напряжение на выходе главного усилителя, подать измеренное значение на ПНК а полученный код на логарифмический преобразователь (на рис.1 – синий цвет).

Рис. 1. Упрощенная структурная схема АРУ
Характеристика логарифмического преобразователя (ЛП) подобрана таким образом (рис. 3), что номинальному значению Uo соответствует входной код ЛП – 21, которому соответствует выходной код «0».

Рис. 2. Характеристика ЛП АРУ
Если же значение Uo не соответствует номиналу, выходной код ЛП отличается от нуля и поступает на сглаживающее устройство – сумматор и набор ячеек ОЗУ (на рис. 1 – красный цвет).
В ОЗУ хранятся управляющие коды АРУ для объекта управления – главного усилителя (на рис. 1 – зеленый цвет). Количество ячеек определяется максимальным возможным числом целей, которые одновременно может обрабатывать приемник.
В случае получения ненулевого кода ошибки с выхода ЛП, этот код в сумматоре складывается с управляющим кодом АРУ из ячейки ОЗУ и полученная сумма записывается в ОЗУ. Новое значение управляющего кода поступает на объект управления – главный усилитель (ГУС). Особенностью ГУС является возможность оперативно менять коэффициент усиления под действием управляющего цифрового кода за что его назвали электронным цифровым аттенюатором (ЭЦА ГУС). Изменение коэффициента усиления приводит значение Uo к номиналу.
Базовые элементы автоматики

Любое автоматическое устройство состоит из связанных между собой элементов, задачей которых является качественное или количественное преобразование полученного ими сигнала.
Элемент автоматики — это часть устройства автоматической системы управления, в которой происходят качественные или количественные преобразования физических величин. Помимо преобразования физических величин элемент автоматики служит для передачи сигнала от предыдущего элемента к последующему.
Элементы, входящие в автоматические системы, выполняют различные функции и в зависимости от функционального назначения подразделяются на воспринимающие, преобразующие, исполнительные, задающие и корректирующие органы (элементы), а также на элементы сложения и вычитания сигналов.
Воспринимающие органы (чувствительные элементы) предназначаются для измерения и преобразования контролируемой или управляемой величины объекта управления в сигнал, удобный для передачи и дальнейшей обработки.
Примеры: датчики для измерения температуры (термопары, терморезисторы), влажности, частоты вращения, силы и т. д.
Усилительные органы (элементы), усилители — устройства, которые, не изменяя физической природы сигнала, производят лишь усиление, т.е. увеличение его до требуемого значения. В автоматических системах применяются механические, гидравлические, электронные, магнитные, электромеханические (электромагнитные реле, магнитные пускатели), электромашинные усилители и т. и.
Преобразующие органы (элементы) преобразуют сигналы одной физической природы в сигналы другой физической природы для удобства дальнейшей передачи и обработки.
Примеры: преобразователи неэлектрических величин в электрические.
Исполнительные органы (элементы) предназначаются для изменения значения управляющего воздействия на объекте управления, если объект представляет собой единое целое с управляющим органом, либо для изменения входных величин (координаты) регулирующего органа, который также следует рассматривать как элемент автоматичсеких систем. По принципу работы и конструкции исполнительные и регулирующие элементы многообразны.
Примеры: нагревательные элементы в системах управления температурой, вентили и клапаны с электрическим приводом в системах регулирования расхода жидкости и газа и т. д.
Задающие органы (элементы) предназначены для задания требуемого значения управляемой величины.
Корректирующие органы (элементы) служат для коррекции автоматических систем с целью улучшения их работы.
В зависимости от функций, выполняемых элементами автоматики, их можно разделить на датчики, усилители, стабилизаторы, реле, распределители, двигатели и др.
Датчик (измерительный орган, чувствительный элемент) — элемент, преобразующий одну физическую величину в другую, более удобную для использования в автоматическом устройстве.
Наиболее распространены датчики, преобразующие неэлектрические величины (температуру, давление, расход жидкости и т. д.) в электрические. Среди них различают датчики параметрические и генераторные .
Параметрическими называют такие датчики, которые преобразуют измеряемую величину в параметр электрической цепи — ток, напряжение, сопротивление и т. д.
Например, температурный контактный датчик преобразует изменение температуры в изменение сопротивления электрической цепи от минимального при замкнутых до бесконечно большого при разомкнутых контактах. Таким элементом является датчик температуры, устанавливаемый в бытовых утюгах.
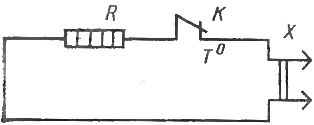

Рис. 1. Схема регулирования температуры нагрева термоконтактом
В холодном утюге термоконтакт, чувствительный к изменению температуры замкнут, и при включении утюга в сеть через нагревательный элемент проходит ток, нагревающий его. При достижении подошвой утюга температуры срабатывания контакта он размыкается и отключает нагревательный элемент от сети.
Генераторным называют такой датчик, который преобразует измеряемую величину в эдс, например термопара, применяемая совместно с вольтметром для измерения температуры. Эдс на концах такой термопары пропорциональна разности температур холодного и нагретого спая.
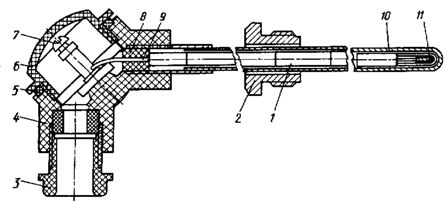
Рис. 2. Устройство термопары
Устройство и принцип действия термопары. Рабочим органом термопары является чувствительный элемент, состоящий из двух разнородных термоэлектродов 9, сваренных между собой на конце 11, который составляет горячий спай. Термоэлектроды изолированы по всей длине с помощью изоляторов 1 и помещены в защитную арматуру 10. Свободные концы элемента подключены к контактам термопары 7, расположенным в головке 4, которая закрывается крышкой 6, имеющей прокладку 5. Положительный термоэлектрод подключают к контакту со знаком » + «.
Герметизация вводов термоэлектродов 9 осуществляется с помощью эпоксидного компаунда 8. Рабочий конец термопары изолируют от защитной арматуры керамическим наконечником, который в некоторых конструкциях для уменьшения тепловой инерционности, может отсутствовать. Термопары могут иметь штуцер 2 для крепления по месту и штуцер 3 для ввода соединительных проводов измерительных приборов.
Подробнее про классификацию, устройство и принцип действия термопар читайте в этой статье: Термоэлектрические преобразователи
Отличия параметрических датчиков от генераторных
В параметрических датчиках под воздействием входного сигнала изменяется какой-либо параметр датчика (сопротивление, емкость, индуктивность) и соответственно его выходной сигнал. Для их работы требуется внешний источник энергии. Генераторные датчики под действием входного сигнала генерируют эдс и не требуют дополнительного источника энергии.

Другие элементы автоматики
Усилитель — элемент, в котором входная и выходная величины имеют одинаковую физическую природу, но преобразуются в количественном отношении. Эффект усиления получается в результате использования энергии источника питания. В электрических усилителях различают коэффициент усиления по напряжению ku = U вых/ U вх, коэффициент усиления по току ki = I вых /I вх и коэффициент усиления по мощности k p = k u ki.
Усилителем может служить любой электромашинный генератор. Небольшое изменение возбуждения приводит в нем к значительному изменению выходного сигнала — тока или напряжения нагрузки. Источником энергии служит двигатель, приводящий генератор во вращение.
Примеры усилителей, ранее активно использовавшихся в электроприводе: электромашинные усилители, магнитные усилители. В настоящее время для этих целей активно используются усилители и преобразователи на тиристорах и транзисторах с большой частотой коммутации.
Стабилизатор — элемент автоматики, обеспечивающий практически неизменное значение выходной величины при изменении входной величины в заданных пределах. Основной характеристикой стабилизатора является коэффициент стабилизации, показывающий, во сколько раз относительное изменение входной величины больше относительного изменения выходной величины. В электротехнических устройствах используют стабилизаторы тока и напряжения.
Реле — элемент, в котором при достижении определенной входной величины выходная величина изменяется скачком. Реле прнменяют для фиксации определенных значений входной величины, усиления сигнала, одновременной передачи сигнала в несколько электрически не связанных цепей. Наиболее распространены различные конструкции электромагнитных реле управления.

Распределитель — элемент автоматики, обеспечивающий поочередную коммутацию цепей для передачи сигнала. Распределение чаще всего используют в электрических цепях. Примером распределителя служит шаговый искатель.
Двигатель — механизм, преобразующий энергию какого-нибудь вида в механическую. Наиболее часто в устройствах автоматики используют электрические двигатели, но применяют и пневматические. В автоматике самыми распространенными устройствами такого типа являются шаговые двигатели.
Передатчик — устройство, предназначенное для преобразования одной величины в другую, удобную для передачи по каналу связи. Помимо основной функции передатчик обычно осуществляет кодирование преобразованной величины, позволяющее рационально использовать каналы связи и уменьшить влияние помех на передаваемый сигнал.
Приемник — устройство, преобразующее сигнал, полученный по каналу связи, в величину, удобную для восприятия элементами системы автоматики. Если при передаче сигнал кодируют, в приемник входит декодирующее устройство. Приемники и передатчики активно используются в системах телеуправления и телесигнализации.
Присоединяйтесь к нашему каналу в Telegram «Автоматика и робототехника»! Узнавайте первыми о захватывающих новостях и увлекательных фактах из мира автоматизации: Автоматика и робототехника в Telegram
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети: