Energy
education

Программируемый логический контроллер — электронная составляющая промышленного контроллера, используемого для автоматизации технологических процессов.
6. Программируемые логические контроллер
Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще – с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем – специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие «ПЛК» все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования.
ПЛК используются практически во всех сферах человеческой деятельности для автоматизации технологических процессов, в системах противоаварийной защиты и сигнализации, в станках с ЧПУ, для управления дорожным движением, в системах жизнеобеспечения зданий, для сбора и архивирования данных, в системах охраны, в медицинском оборудовании, для управления роботами, в системах связи, при постановке физического эксперимента, для управления космическими кораблями, для автоматизации испытаний продукции и т. д. Тем не менее, до сих пор остается много отраслей экономики, куда контроллерная автоматизация только начинает проникать.
Контроллеры используются не только как автономные средства локального управления технологическим установками, но и в составе широкомасштабных систем автоматизированного управления целыми предприятиями.
В настоящее время на Российском рынке преобладают контроллеры иностранных фирм: Siemens, Mitsubishi, ABB, Schneider Electric, GE Fanuc, однако с течением времени увеличивается доля рынка, занятая отечественной продукцией Российских фирм (Овен, Элемер и др.)
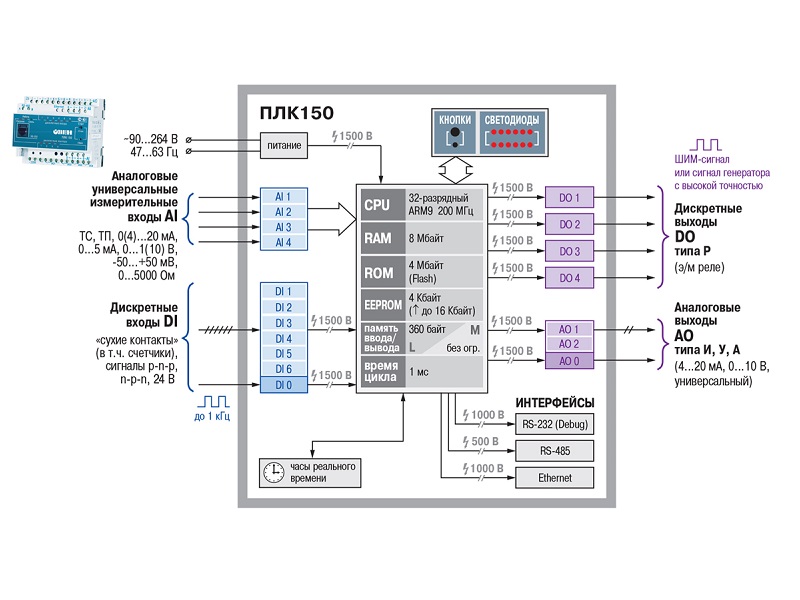
Типовой состав ПЛК включает центральный процессор, память, сетевые интерфейсы и устройства ввода-вывода. Иногда эта конфигурация дополняется устройством для программирования и пультом оператора, устройствами индикации, реже – принтером, клавиатурой, мышью или трекболом.
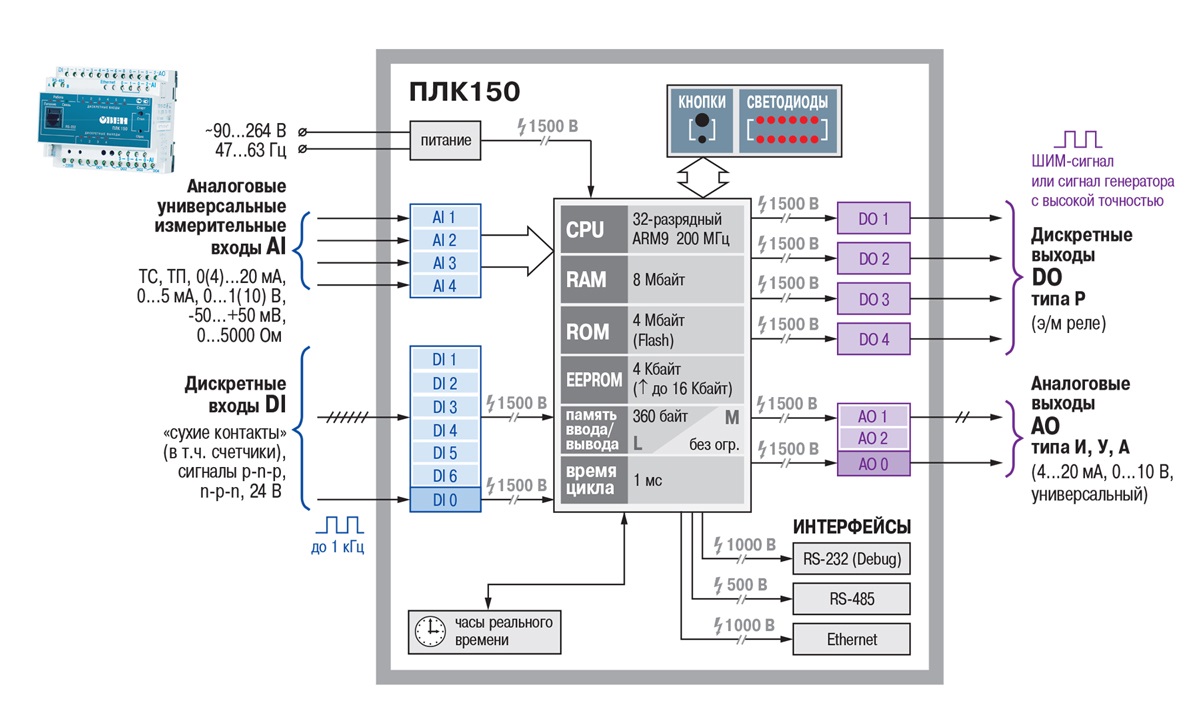
Процессорный модуль включает в себя микропроцессор (центральное процессорное устройство – ЦПУ), запоминающие устройства, часы реального времени и сторожевой таймер. Основными характеристиками микропроцессора являются разрядность (в ПЛК используются 8-ми, 16-ти и 32-разрядные микропроцессоры), тактовая частота, архитектура, наличие операций с плавающей точкой, типы поддерживаемых портов ввода-вывода, температурный диапазон работоспособности и потребляемая мощность.
Производительность микропроцессоров с одной и той же архитектурой пропорциональна тактовой частоте. Большинство контроллеров используют микропроцессоры с сокращенным набором команд (RISC — Reduced Instruction Set Computing), в которых используется небольшое количество команд одинаковой длины и большое количество регистров. Сокращенный набор команд позволяет строить более эффективные компиляторы и конвейер процессора, способный за каждый такт выдавать результат исполнения очередной команды.
Для контроллеров, выполняющих интенсивную математическую обработку данных, важно наличие математического сопроцессора (вспомогательного процессора, выполняющего операции с плавающей точкой) или сигнальных процессоров, в которых операции типа $Y=A·Х+В$ выполняются за один такт. Сигнальные процессоры позволяют ускорить выполнение операций свертки или быстрого преобразования Фурье.
Емкость памяти определяет количество переменных (тегов), которые могут быть обработаны в процессе функционирования ПЛК. В микропроцессорах время доступа к памяти является одним из существенных факторов, ограничивающих быстродействие. Поэтому память делят на несколько уровней иерархии, в зависимости от частоты использования хранящихся в ней данных и быстродействия. Иерархия памяти относится к существенным характеристиками архитектуры процессора, поскольку она позволяет снизить отрицательное влияние медленной памяти на быстродействие микропроцессора. Основными типами памяти является постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ) и набор регистров. Регистры являются самыми быстродействующими элементами памяти, поскольку они используются арифметико-логическим устройством (АЛУ) для исполнения элементарных команд процессора. ПЗУ используют для хранения редко изменяемой информации, такой, как операционная система, драйверы устройств, загрузчик, исполняемый модуль программы пользователя. ОЗУ используется для хранения данных, которые многократно изменяются в процессе работы контроллера, например, значения тегов, результаты промежуточных вычислений, диагностическая информация, массивы, выводимые на графики, данные для отображения на дисплее.
В качестве ПЗУ (или ROM – «Read Only Memory») обычно используется электрически стираемая перепрограммируемая память (EEPROM – «Electrically Erasable Programmable ROM». Разновидностью EEPROM является флэш-память, принцип действия которой основан на хранении заряда в конденсаторе, образованном плавающим затвором и подложкой МОП-транзистора. Особенностью флэш-памяти является ее энергонезависимость, т.е. сохраняемость данных при выключенном питании. Стирание и перезапись во флэш-памяти выполняется не отдельными ячейками, а большими блоками, поэтому она получила название, происходящее от английского «flash» — «вспышка» . Недостатком всех ПЗУ является низкое быстродействие.
Количество циклов записи информации во флэш-память ограничено и составляет несколько десятков тысяч раз. По конструктивному исполнению и интерфейсам флэш-память подразделяется на Compact Flash (CF), Memory Stick, Secure Digital (SD), MuliMediaCard (MMC), RS-MMC, SmartMedia Card (SMC), USB-flash. Флэш-память может быть впаяна в печатную плату или быть съемной.
В качестве ОЗУ современные микропроцессоры используют статическую память (SRAM – Static Random Access Memory) и динамическую (DRAM – «Dynamic Random Access Memory»), SDRAM («Synchronous DRAM»). SRAM выполняется на триггерах, информация в которых сохраняется неограниченно долго при наличии питания. В динамической памяти информация хранится на конденсаторах и поэтому DRAM требует периодической регенерации (перезарядки конденсаторов). К недостаткам триггерной памяти относится ее высокая стоимость, связанная с низкой плотностью компоновки триггеров на кристалле, и малое отношение емкости к цене. Достоинством является высокое быстродействие, достигающее гигагерц, в то время как память на конденсаторах не может работать на частотах выше сотен герц. Оба типа памяти (DRAM и SRAM) не могут сохранять информацию при отключении питания ПЛК. Поэтому некоторые типы ПЛК используют батарейное питание памяти для сохранения работоспособности системы автоматизации после кратковременного прерывания питания.
Моноблочные и модульные контроллеры используют, как правило, параллельную шину для обмена данными с модулями ввода-вывода, что позволяет на порядок повысить быстродействие их опроса по сравнению с последовательной шиной. Параллельные шины могут быть стандартными (ISA, PC/104, PCI, ComactPCI, VME, CXM) или частнофирменными. Последовательная шина контроллера (на основе интерфейса RS-485) используется для подключения к нему удаленных (распределенных) модулей ввода-вывода.
Программирование контроллеров малой мощности выполняется с помощью кнопок, расположенных на лицевой панели или с помощью переносного пульта для программирования. В качестве пульта в последнее время используется компьютер формата «ноутбук». Программирование мощных контроллеров выполняется с помощью персонального компьютера, на котором устанавливается специальное программное обеспечение, например CoDeSys или ISaGRAF, выполняющее трансляцию технологического языка стандарта МЭК 61131-3 в исполняемый код процессора, который загружается в ПЗУ ПЛК, например, через порт Ethernet.
Сторожевой таймер (Watchdog Timer – WDT) представляет собой счетчик, который считает импульсы тактового генератора и в нормальном режиме периодически сбрасывается (перезапускается) работающим процессором. Если процессор «зависает», то сигналы сброса не поступают в счетчик, он продолжает считать и при достижении некоторого порога вырабатывает сигнал «Сброс» для перезапуска «зависшего» процессора.
Часы реального времени (РВ) представляют собой кварцевые часы, которые питаются от батарейки и поэтому продолжают идти при выключенном ПЛК. Часы РВ используются, например, для управления уличным освещением в зависимости от времени суток, в системах охраны объектов и других случаях, когда необходима привязка данных или событий к астрономическому времени.
Стандартными напряжениями питания ПЛК являются напряжения 12 В, 24 и 48 В. Источником электрической энергии обычно является промышленная сеть 220В, 50 Гц. В случае распределенных систем автоматизации источник питания может быть расположен вдали от ПЛК, поэтому напряжение на клеммах ПЛК или модулей ввода-вывода может сильно отличаться от напряжения источника питания вследствие падения напряжения на сопротивлении кабеля. Для решения этой проблемы каждый ПЛК или каждый модуль удаленного ввода снабжаются встроенным стабилизатором напряжения, который обеспечивает нормальное их функционирование в диапазоне напряжений от 10 до 30 В.
Низкое напряжение питания позволяет питать контроллеры от аккумуляторов бортовых сетей транспортных средств или переносных аккумуляторов.

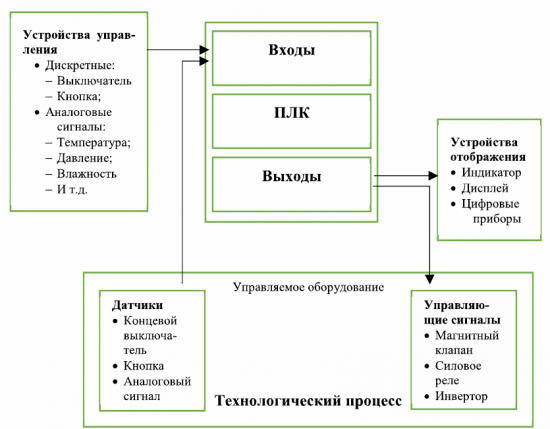
Входы – служат для подключения к прибору различных типов датчиков; блок обработки входного сигнала – включает коррекцию показаний датчиков, цифровые фильтры, вычислители дополнительных величин (разности, отношения и т. п.); логические устройства – формируют управляющие сигналы для выходных устройств; выходные устройства – служат для передачи регистрирующих или управляющих сигналов на исполнительные механизмы.
Администратор сайта: Колосов Михаил
email:
Copyright © 2011-2024. All rights reserved.
Программируемый логический контроллер
Контроллер является главной частью автоматизации в любом оборудовании. Программируемый логический контроллер – микропроцессорное устройство, предназначенное для сбора, обработки, преобразования, хранения информации, выработки команд управления и работы в режимах реального времени.
1. Деменков Н.П. Системы автоматического управления на основе программируемых логических контроллеров // Техническая коллекция Schneider Electric. – 2006. – Вып. 16.
2. Деменков Н.П. Языки программирования промышленных контроллеров: учеб. пособие / Под. ред. К.А. Пупкова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2004.
3. Елизаров И.А. Технические средства автоматизации. Программно-технические комплексы и контроллеры / Ю.Ф. Мартемьянов и др. – М.: Машиностроение, 2004.
5. http://electricalschool.info/spravochnik/ 1999-chto-takoe-programmiruemyy-logicheskiy-kontroller.html
На основе данного микропроцессора может осуществляться управление электронными или релейными схемами, а также системами, основанными на пневматике, гидравлике и механике. В зависимости от сложности программы и размера управляемого объекта зависит размер и тип контроллера.
Контроллер очень похож на обычный персональный компьютер, но гораздо меньший по размеру и с ограниченным набором функций. ПЛК состоит из процессора и оперативной памяти. Может присоединяться дополнительное оборудование в редких индивидуальных случаях. В задачи промышленных микропроцессоров входит сбор информации с датчиков, обработка сигналов по заданной программе, вывод командных сигналов на исполнительные устройства.
В зависимости от назначения ПЛК создают различные вариации:
1. Оперативная память, процессор, входы и выходы объединены в одном корпусе. Это самая распространенная модель ввиду своей простоты и малого размера. Однако такой процессор подойдет лишь для небольших систем.
2. Процессор и оперативная память находятся в одном корпусе, но вместо стандартных входов и выходов контроллер подключен к общей шине управления, к которой подключены все датчики и исполнительные устройства. Такая реализация используется в промышленности, когда нужно контролировать огромное количество систем.
Базовые компоненты ПЛК:
2. Процессорный модуль.
3. Модули ввода и вывода сигналов.
1. Регулирует питание микропроцессора по номинальным параметрам частоты напряжения и тока, осуществляет защиту от перегрузок, перегрева и коротких замыканий.
2. Имеет встроенную память для хранения исполняемой программы.
Может быть подключен к сети для удаленного управления.
3. Может работать с аналоговыми и дискретными сигналами.
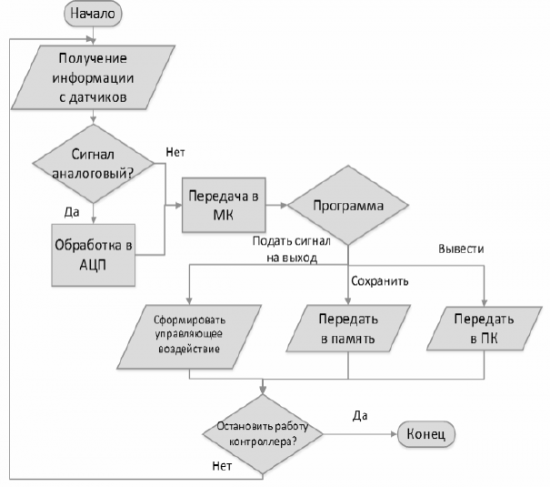
В самом начале необходимо загрузить в контроллер необходимую программу, если это не было сделано ранее или изменить ее из-за новых условий работы. Подключив все входы и выходы, включаем микропроцессор. Он начнет выполнение цикла программы:
Для Цитирования:
Чигин А. С., Программируемый логический контроллер. Электрооборудование: эксплуатация и ремонт. 2022;1.
Что такое программируемый логический контроллер (ПЛК)
Трудно представить любой современный промышленный автоматизированный технологический процесс без программируемых логических контроллеров (ПЛК, PLC, Programmable Logic Controllers). Сегодня они используются во всех отраслях, как в крупных, так и в малых системах автоматизации.
Что такое программируемый логический контроллер (ПЛК)
Контроллер (от англ. Control) — управление. Контроллером в автоматизированных системах называют техническое средство, выполняющее функции управления физическими процессами в соответствии с заложенным алгоритмом, с использованием информации, получаемой от датчиков и выводимой на окончательные устройства. Любое устройство, способное работать автоматически, имеет в своем составе управляющий контроллер — модуль, определяющий логику работы устройства.

Программируемые логические контроллеры (ПЛК) — технические средства, используемые для автоматизации технологических процессов. Это электронное специализированное устройство, работающее в реальном масштабе времени.
ПЛК можно запрограммировать в цифровом виде и, таким образом, очень легко адаптировать к требованиям конкретного технологического процесса. В связи с растущими требованиями к современным машинам и производственным процессам решения с использованием ПЛК в области автоматизации стали неотъемлемой частью повседневного промышленного производства.
Основным режимом работы ПЛК выступает его длительное автономное использование, зачастую в неблагоприятных условиях окружающей среды, без серьезного обслуживания и без вмешательства человека. ПЛК обычно применяются для управления последовательными процессами, используя входы и выходы для определения состояния объекта и выдачи управляющих воздействий.

Роль ПЛК в автоматизации производственных процессов
Программируемые логические контроллеры — идеальное решение для индивидуального управления различными приложениями, машинами, системами и процессами или управления мощностью с помощью цифровых технологий.
В автоматизации процессов, от движений роботов-манипуляторов в автомобильной промышленности до аспектов безопасности на химических предприятиях, ПЛК играют важную роль.
Со временем он становится все более и более популярным, поскольку в работу ПЛК включается все больше функций. В любой системе управления, основанной на автоматизации, основное внимание уделяется получению желаемого результата эффективным и надежным способом.
ПЛК обеспечивают простое и экономичное решение многих задач автоматизации, таких как логическое/последовательное управление, пропорционально-интегрально-дифференциальное (ПИД) управление и расчеты, координация и связь, управление оператором и мониторинг, безопасность оборудования и персонала, запуск и остановка оборудования, так далее.
Большинство производственных приложений включают управление повторяющимися и дискретными операциями; например, автоматическая сборка компонентов, прессование и экструзия, печать на текстильных предприятиях и т. д.

Как устроены и работают ПЛК
Программируемый логический контроллер, представляют собой микропроцессорное устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления, имеющий конечное количество входов и выходов, подключенных к ним датчиков, ключей, исполнительных механизмов к объекту управления, и предназначенный для работы в режимах реального времени.

Программируемый логический контроллер, это на сегодняшний день относительно небольшой компьютер (в зависимости от того, насколько большой объект с его помощью автоматизируется) в промышленном исполнении, управляемый микропроцессором с собственной операционной системой, адаптированный под нужды решения задач автоматизации в режиме реального времени, с максимально коротким откликом время.
Для связи с окружающей средой ПЛК оборудован входными периферийными устройствами (входами), на которые подаются сигналы от управляемого процесса, дискретные сигналы в виде состояния включения/выключения (например, определение положения конечным датчиком) или непрерывные аналоговые сигналы с датчиков (например, значения температуры, давления, уровеня. ).
На «противоположной» стороне ПЛК имеет выходные периферийные устройства (выходы), к которым подключены элементы управляющие автоматизируемым процессом, опять же в виде дискретного сигнала управления вкл/выкл (например, электромагнитное реле, контактор двигателя, катушка клапана, сигнальная лампа. ) или в виде непрерывного аналогового выходного управляющего сигнала (например, для управления скоростью двигателя, положением регулирующего клапана и т. д.).
Между входами и выходами «располагается» управляющая логика — ЦП, которая на основе состояния входов управляет выходами таким образом, чтобы добиться минимального отклонения от желаемого или заданного состояния всего устройства.
Программист определяет, как ПЛК будет реагировать на изменение состояния входных сигналов, создавая программный алгоритм решения заданной задачи (сокращенно программу) и сохраняя его в памяти ПЛК. Затем операционная система ПЛК обеспечивает повторное (циклическое) выполнение программы.
Помимо классической периферии (бинарной, аналоговой) ПЛК оснащается интерфейсом для связи с программатором, таким же или другим интерфейсом для связи с оператором (при необходимости).
Другим вариантом является подключение ПЛК к сети, когда он может обмениваться данными с другими ПЛК, периферийными устройствами, системами в целом в сетевой иерархии.
Итак, типичный ПЛК состоит из следующих частей:
- Через входы к блоку управления подключаются, например, кнопки, световые барьеры или датчики температуры. Благодаря этим компонентам система ПЛК может отслеживать текущее состояние машины.
- Выходы подключены к устройству, например, к электродвигателям, гидравлическим клапанам, которые ПЛК использует для управления конкретной машиной.
- Программа пользователя — программное обеспечение для ПЛК, обеспечивает переключение выходов в зависимости от активации входов.
- Коммуникационный интерфейс используется для подключения ПЛК к другим системам.
- ПЛК также включает в себя собственный источник питания, центральный процессор и внутреннюю шину.
Преимущества ПЛК по сравнению с релейными схемами
Для используемых в настоящее время релейно-контактных систем управления характерна невысокая надёжность, наличие открытых контактов и др. Применение программируемых логических контроллеров (ПЛК) для автоматизации локальных систем управления является наиболее эффективным.
Простота ПЛК заключается в их программировании с использованием релейной логики.
Со временем ПЛК продолжали развиваться и адаптироваться к конкретным потребностям в промышленной среде. Функции ПЛК обладают рядом преимуществ: благодаря своей гибкости они могут применяться в самых разных отраслях промышленности. В настройки можно вносить изменения в любое время без какого-либо вмешательства в работу самого оборудования.
Только индивидуально программируемые устройства для управления, контроля и регулирования производительности производственных машин могут удовлетворить высокие требования современной промышленности.
Еще одной важной особенностью ПЛК является его устойчивость к производственным опасностям, таким как вибрация, пыль, температура и т. д.
ПЛК обычно можно установить непосредственно на производственной машине. Это экономит необходимое пространство. Помимо возможности удаленного управления ПЛК, одним из его самых больших преимуществ является коммуникационная способность.
Программирование ПЛК
Существует два способа ввода программы в ПЛК:
- Прямой ввод программы в память программ (оперативное запоминающее устройство [ОЗУ]), подключенную к центральной системе управления. Для этого программатор подключается к процессору или к модулям интерфейса программатора.
- Программирование субмодулей стираемой и программируемой постоянной памяти (СППЗУ) в программаторе без подключения к компьютеру (офлайн). Затем субмодули памяти подключаются к центральному контроллеру.
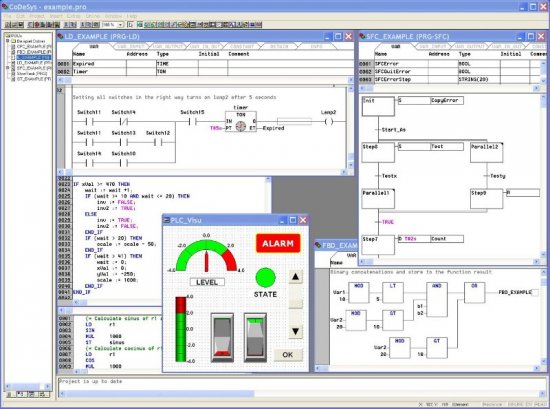
ПЛК программируются в соответствии со стандартом МЭК-61131-3 с помощью специализированных комплексов, один из наиболее популярных является CoDeSys. Он включает в себя следующие языки: графические (Ladder Diagram, Function Block Diagram, Sequential Function Chart, Continuous Function Chart), текстовые (Instruction List, Structured Text).

История ПЛК
Прежде чем ПЛК был разработан в его нынешнем виде, он прошел историческую эволюцию от простой релейной логики до систем с микропроцессорным управлением.
Первый в мире программируемый логический контроллер появился в середине XX века.
На рубеже 1960-х и 1970-х годов происходило быстрое развитие микропроцессорной техники, что напрямую повлияло на развитие систем промышленной автоматизации. Микропроцессоры и цифровые схемы начали массово применяться в системах управления на промышленных предприятиях.
Работа над первым ПЛК началась в 1968 году. В то время в компании General Motors группа инженеров начала разрабатывать промышленные контроллеры, которые можно было бы легко программировать. Они длжны были быть максимально просты в ремонте и обслуживании с возможностью замены установленных или добавления новых модулей.
Работа над первым программируемым контроллером велась в США параллельно пятью компаниями: Bedford Associates, General Motors, International Instruments, Digital Equipment Corporation и Struthers-Dunn Systems Division.
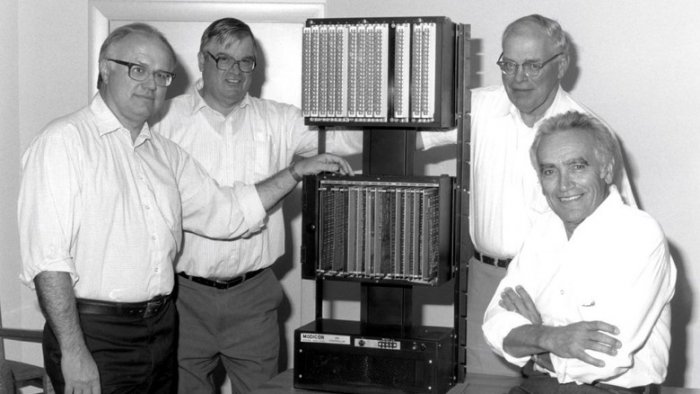
» Modicon 084″ — первый ПЛК в мире
Первый в мире программируемый логический контроллер называли «Modicon 084». Он был представлен в 1969 году и поддерживал до 128 входов и выходов. Аппарат весил 46 кг.
«Modicon 084» представлял собой шкаф с набором модулей, а его память составляла лишь 4 килобайта. Этот контроллер был был чрезвычайно прочным и надежным устройством.
В 1970 году на выставке станков в Чикаго была представлена первая в мире автоматизированная система управления на базе этого контроллера.
Термин «Программируемый логический контроллер, ПЛК» ввела компания «Allen-Bradley» в 1971 году. Американский инженер-механик Ричард Морли сичтается «отцом ПЛК».
Торговая марка «Modicon PLC» теперь принадлежит компании «Schneider Electric».
Первые из этих систем приписываются двум техническим специалистам — Ричарду Э. Морли и Одо Дж. Струджеру. В то время как Морли представил свою систему «Modicon 084» как «полупроводниковый компьютер с последовательной логикой» в 1969 году, Одо Дж. Струджер участвовал в разработке ПЛК для находящегося в Висконсине Allen-Bradley. Оба инженера считаются создателями первого программируемого логического контроллера (ПЛК). Со временем требования к производственной среде во всем мире выросли. Таким образом, ПЛК эволюционировал и был введен в эксплуатацию во многих версиях.
— Инженер-электрик Яков Кузнецов
С момента своего появления около 55 лет назад ПЛК продолжают играть важную роль в автоматизации технологических процессов.
Структура и алгоритм работы ПЛК
Структура работы программируемого логического контроллера:
Алгоритм работы ПЛК:
В качестве основного режима работы ПЛК выступает его длительное автономное использование, зачастую в неблагоприятных условиях окружающей среды, без серьезного обслуживания и практически без вмешательства человека.

Отличие ПЛК от других электронных приборов
ПЛК имеют ряд особенностей, отличающих их от прочих электронных приборов, применяемых в машиностроении:
- в отличие от микроконтроллера (однокристального компьютера) — микросхемы, предназначенной для управления электронными устройствами — областью применения ПЛК обычно являются автоматизированные процессы промышленного производства в контексте производственного предприятия;
- в отличие от компьютеров ПЛК ориентированы на работу с агрегатами машин через развитый ввод сигналов датчиков и вывод сигналов на исполнительные механизмы, ориентированных на принятие решений и управление оператором;
- в отличие от встраиваемых систем ПЛК изготавливаются как самостоятельные изделия, отдельные от управляемого при его помощи оборудования.
- наличие расширенного числа логических операций и возможность задания таймеров и счетчиков.
- все языки программирования ПЛК имеют легкий доступ к манипулированию битами в машинных словах, в отличие от большинства высокоуровневых языков программирования современных компьютеров.
Существуют ПЛК разного уровня сложности в зависимости от сложности решаемых задач автоматизации.
Основные операции ПЛК соответствуют комбинационному управлению логическими схемами специфических агрегатов — механических, электрических, гидравлических, пневматических и электронных.
В процессе управления контроллеры генерируют выходные сигналы (включить — выключить) для управления исполнительными механизмами (электродвигателями, клапанами, электромагнитами и вентилями) на основании результатов обработки сигналов, полученных от датчиков, либо устройств верхнего уровня.
Современные программируемые контроллеры выполняют также и другие операции, например, совмещают функции счетчика и интервального таймера, обрабатывают задержку сигналов.

Программируемые логические контроллеры среднего и высокого уровня, как правило, имеют встроенные аппаратно-программные средства управления движением, в частности, модули быстродействующих счетчиков, модули позиционирования и др., которые дают возможность сравнительно просто реализовать функции управления движением и обеспечить позиционирование с высокой точностью.
Конструктивно ПЛК приспособлены для работы в типовых промышленных условиях, с учетом загрязненной атмосферы, уровней сигналов, термо- и влагостойкости, ненадежности источников питания, а также механических ударов и вибраций. С этой целью аппаратная часть заключается в прочный корпус, минимизирующий негативное влияние ряда производственных факторов.

Главным отличием ПЛК от релейных схем управления является алгоритмы, которые реализованы с помощью программ. На одном контроллере можно реализовать схему, эквивалентную тысячам элементов жесткой логики. При этом надежность работы схемы не зависит от ее сложности.
Примениение ПЛК в составе АСУ
Программируемые логические контроллеры традиционно работают в нижнем звене автоматизированных систем управления предприятием (АСУ) — систем, непосредственно связанных с технологией производства.
ПЛК обычно являются первым шагом при построении систем АСУ. Это объясняется тем, что необходимость автоматизации отдельного механизма или установки всегда наиболее очевидна. Она дает быстрый экономический эффект, улучшает качество производства, позволяет избежать физически тяжелой и рутинной работы. ПЛК по определению созданы именно для такой работы.
Основное преимущество применения программируемых логических контроллеров в составе автоматизированных систем управления является в том, что один маленький механизм может заменить огромное количество электромеханических реле, а также быстрое время сканирования, компактные системы ввода/вывода, стандартизированные средства программирования и специальные интерфейсы, позволяющие подключать нетрадиционные устройства автоматики непосредственно к контроллеру или объединять разное оборудование в единую систему управления.
Как правильно выбрать ПЛК
Выбор программируемого контроллера является важной и сложной задачей при создании систем автоматического управления технологическими параметрами на любом промышленном предприятии.
При его выборе необходимо учесть и оценить большое количество факторов. Объединив технологические требования к конкретному объекту автоматического управления со сравнительным анализом современных программируемых логических контроллеров, можно принять правильное решение.

Выбор правильного ПЛК для конкретного промышленного применения очень важен. Это зависит от нескольких факторов, таких как:
- Системные требования: в основном определяет задачу, которую должен выполнять предполагаемый ПЛК, поэтому цель, которую необходимо достичь, должна быть четко определена. Поэтому необходимо разделить всю задачу на несколько простых и понятных шагов.
- Требования к применению: Характер устройств ввода и вывода, которые должны быть подключены к ПЛК, и список функций, необходимых для каждого из этих устройств. Помимо логических операций, требуются ли какие-либо другие специальные функции? Каково необходимое количество входов и выходов? Какой объем памяти требуется вместе с требованиями к скорости процессора?
- Электрические требования: Это означает требования к электрической мощности, т. е. номинальное напряжение и ток для отдельных входов и выходов, а также для самого ПЛК.
- Скорость работы: Скорость работы предполагаемого ПЛК необходимо определить в зависимости от характера динамики устройства. Это очень важно в случае «критичных ко времени» операций, а также для функций безопасности.
- Коммуникация: если приложению требуется обмен данными вне процесса, т. е. связь со станцией оператора.
- Условия окружающей среды: Суровые условия эксплуатации, в которых должен находиться ПЛК, определяют технические характеристики распределительного щита, а также доступность для обслуживания и устранения неполадок.
При покупке ПЛК в первую очередь необходимо тщательно продумать, какой тип подойдет для предполагаемого использования.
Классические ПЛК — это модули, которые обычно можно программировать с помощью компьютера. После этого, компьютер больше не нужен для работы самого ПЛК. В принципе, необходимо различать модульные, компактные и слотовые ПЛК.
Компактные ПЛК обычно дешевле и занимают меньше места. Затем он используется в основном для небольших процессов автоматизации.
Помимо приложений, основанных на платформе ПК, существуют также компактные ПЛК, которые можно программировать с панели управления без компьютера.
Модульные ПЛК предлагают возможность гибкой сборки блока управления из отдельных сменных модулей, чтобы можно было программировать более сложные автоматизированные задачи.
Существуют модули, которые могут быть реализованы в системе в виде подключаемых плат в свободный слот на материнской плате.
Также необходимо различать ПЛК по способу выполнения своей работы. В дополнение к моделям, которые управляют входами в заранее определенном цикле, и ПЛК с обработкой выходных данных на различных этапах, также доступны модели ПЛК, управляемые событиями.
Перед покупкой ПЛК следует обратить особое внимание на количество входов и выходов. Далее необходимо учесть другие параметры, которые не учитывались при первоначальном планировании. Также подумайте, нужен ли вам ПЛК со встроенным дисплеем и сенсорной панелью. В некоторых случаях может быть достаточно считывания значений и управления системой через существующую ИТ-инфраструктуру.
Что такое HMI
HMI (Human Machine Interface) — коммуникационный интерфейс между человеком и машиной. Эти интуитивно понятные и удобные для пользователя интерфейсы используются, чтобы позволить пользователям управлять машинами и управлять ими без глубоких знаний программирования ПЛК. Одним видом из устройств HMI являются SCADA-системы: Системы сбора данных и оперативного диспетчерского управления (SCADA-системы)
Применение ПЛК в системах автоматизации:
Что такое программируемые контроллеры (ПЛК): назначение, особенности и принцип их работы
В этой статье мы рассмотрим, что такое ПЛК, как они работают, какие преимущества они предоставляют и как их можно использовать в различных отраслях промышленности.
Программируемые логические контроллеры, или ПЛК, являются одним из наиболее важных инструментов в автоматизации технологических процессов в промышленности, энергетике, медицине и других отраслях. Они позволяют создавать и управлять сложными системами, которые могут обрабатывать большие объемы данных и принимать решения на основе этих данных. В этой статье мы рассмотрим, что такое ПЛК, как они работают, какие преимущества они предоставляют и как их можно использовать в различных отраслях промышленности.
Устройство и схема ПЛК
Устройство ПЛК можно разбить на 3 основные секции, независимо от их конструкции:
- входная;
- выходная;
- центральная.

Входная секция
Входная секция предназначена для подключения датчиков, переключателей, смарт-устройств и т.д. Например, если мы хотим контролировать температуру в помещении, то мы можем подключить к ПЛК датчик температуры, и он будет считывать эту информацию.

Однако, для того, чтобы ПЛК мог эффективно управлять процессом, необходимо правильно выбрать входные сигналы. Существует три основных вида входов в ПЛК: дискретные, аналоговые и специальные.
- Дискретные входы используются для получения информации о состоянии различных устройств или датчиков. Они могут принимать значения «0» или «1», что соответствует логическому состоянию «включено» или «выключено». Например, дискретный вход может использоваться для контроля включения/выключения освещения, открытия/закрытия двери или переключения режима работы оборудования.
- Аналоговые входы используются для получения информации о какой-либо непрерывно изменяющейся физической величине, например для получения информации об уровне жидкости, давления, температуры и других физических параметров. Они могут быть преобразованы в цифровой формат с помощью аналого-цифровых преобразователей (АЦП). Аналоговые входы позволяют получать более точную информацию о процессе, чем дискретные входы.
- Специальные входы используются для передачи информации о специальных событиях, таких как аварийные сигналы, сигналы от внешних устройств или сигналы от других ПЛК. Они могут иметь различные форматы данных и протоколы связи.
Выбор правильного типа входа зависит от конкретной задачи, которую необходимо решить с помощью ПЛК. Дискретные входы обычно используются для простых задач управления, тогда как аналоговые входы и специальные входы могут использоваться для более сложных задач.
Выходная секция
Выходная секция программируемого логического контроллера (ПЛК) предназначена для управления исполнительными механизмами и устройствами. Она состоит из выходных портов, которые могут быть дискретными или аналоговыми. Дискретные порты используются для управления дискретными устройствами. Аналоговые порты позволяют управлять аналоговыми устройствами. В качестве нагрузки выходов могут быть подключены пускатели моторов, освещение, клапаны, смарт-устройства и т.д.

Выходная секция свободно программируемого контроллера ПЛК может быть реализована на различных типах микросхем, включая микроконтроллеры, специализированные микросхемы для управления двигателями или клапанами, а также программируемые драйверы для управления силовыми ключами.
Для управления исполнительными механизмами используются специальные алгоритмы, которые определяют, какие выходы должны быть активированы для достижения желаемого результата. Эти алгоритмы могут быть написаны пользователем на языке программирования ПЛК или загружены из внешней памяти.
Центральная секция
В центральную секцию входит процессор, память и интерфейсы для связи с другими устройствами. Она отвечает за выполнение программы, которая была написана на языке программирования ПЛК.

В качестве центрального процессора в ПЛК выступают микропроцессоры. Они выполняют основную обработку данных и управление системой. Микропроцессоры имеют высокую скорость работы и способны обрабатывать большое количество информации. Могут работать в режиме реального времени или в фоновом режиме. В режиме реального времени микропроцессор обрабатывает данные, поступающие от датчиков и других устройств, и принимает решения на основе этих данных. В фоновом режиме микропроцессор может выполнять задачи, не связанные с управлением процессом, такие как обновление прошивки или диагностика системы.
В зависимости от конкретных задач необходимо подбирать ПЛК с соответствующими системными характеристиками микропроцессора (CPU, RAM, ROM, RTC и т.д.).
Принцип работы PLC (Programmable Logic Controller)
Принцип работы свободно программируемых контроллеров ПЛК заключается в обработке входных сигналов, выполнении заданной программы и управлении выходами. Рабочий цикл ПЛК состоит из четырех основных фаз:
- Опрос входов — на этой фазе ПЛК опрашивает все входные сигналы, которые были переданы на его входы. Это может быть информация от датчиков, кнопок, переключателей и других устройств.
- Выполнение пользовательской программы — на этой фазе программа, написанная пользователем, выполняется на ПЛК. Программа может быть написана на специальном языке программирования.
- Установка значений выходов — после выполнения программы ПЛК устанавливает значения на своих выходах. Выходы могут быть различными устройствами, такими как насосы, освещение, электродвигатели и т.д.
- Некоторые вспомогательные операции — на этой фазе могут выполняться дополнительные операции, такие как проверка состояния входов, обновление программного обеспечения, визуализация и т.д.
Таким образом, принцип работы ПЛК основан на обработке входных данных, выполнении пользовательской программы и управлении выходными сигналами. Рабочий цикл ПЛК состоит из 4 фаз, которые обеспечивают его эффективную работу в различных производственных процессах.
Типы PLC
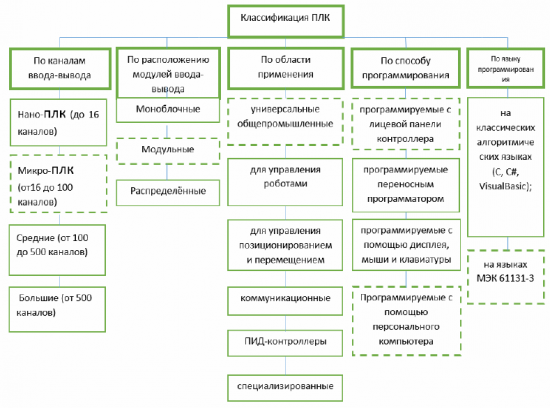
По конструктивному исполнению программируемые логические контроллеры могут быть разделены на:
- моноблочные;
- модульные.
Моноблочные
Моноблочные программируемые контроллеры представляют собой одно устройство, на котором расположены все необходимые компоненты для работы (входы, выходы и некоторые интерфейсы) . Такие контроллеры имеют компактный размер и просты в установке.

Их можно использовать без дополнительных модулей для автоматизации систем. Если входов/выходов не хватает можно использовать дополнительные модули ввода/вывода.
Модульные
Модульные программируемые контроллеры состоят из нескольких модулей, которые могут соединяться между собой через специальные разъемы. Это позволяет создавать более сложные системы, так как можно добавлять новые модули и расширять функциональность систем, также могут быть добавлены и заменены модули в любой момент времени.
Пример программируемого логического контроллера «PRE-PLC-10» и модуля ввода/вывода от российского производителя «Приборэнерго»:

Языки программирования ПЛК
Международной Электротехнической Комиссией разработан стандарт МЭК-61131-3, концентрирующий все передовое в области языков программирования для систем автоматизации технологических процессов. Этот стандарт требует от различных изготовителей ПЛК предлагать команды, являющиеся одинаковыми и по внешнему виду, и по действию.
- Sequential Function Chart (SFC) – «последовательность функциональных блоков». Можно последовательно управлять процессами на основе систем условий, передавая управление с одной операции на другую.;
- Function Block Diagram (FBD) – «функциональные блоковые диаграммы». Можно использовать наборы библиотечных или собственных блоков;
- Ladder Diagrams (LАD) – в основе лежат релейно-контактные системы.
- Statement List (STL) – сложный и продвинутый язык, который позволяет создавать более проработанные программы путем введения мнемонических обозначений команд.
- Instruction List (IL) – текстовый язык программирования, с помощью которого можно добиться оптимизированного кода для реализации критических секторов программ.
В каждом из перечисленных языков программирования есть свои преимущества и недостатки, поэтому при выборе языка специалисты опираются на свой опыт и предпочтения. Но всегда можно переконвертировать уже написанную программу из одного языку в другой без особых трудностей.
Для программирования ПЛК используются специальная среда разработки, например программные комплексы CoDeSys и Beremiz.
Как выбрать нужный ПЛК?
Какой именно ПЛК выбрать зависит от конкретного случая. Решающим могут стать разнообразные факторы — это бюджет, надежность, требования кибербезопасности, доступность поставок, доступность технической поддержки, функциональность, внутренние регламенты заказчика, назначение (например для диспетчеризации ЖКХ), личные предпочтения программиста, ведь на одном контроллере он развернет систему за неделю, а на другом за 3 и иногда это очень критично.
Рекомендуем выбирать программируемые логические контроллеры (ПЛК) не только исходя из бюджета, но и от того, где будет применяться устройство. В ответственных системах важно использовать только качественные и надежные PLC.
- Связанные товары