Диспетчерский пункт района распределительных сетей — Устройства телемеханики на диспетчерском пункте
Для сбора и передачи информации о состоянии объектов электрической сети и передачи команд диспетчерского управления оборудованием этих объектов служит телемеханика. Устройства телемеханики в комплексе с каналами связи образуют систему телемеханики (рис. 7), позволяющую выполнять указанные функции на расстоянии. Передача команд от оперативного персонала или автоматических управляющих устройств на управление оборудованием объектов электрической сети и передача информации о состоянии оборудования объектов в обратном направлении осуществляются автоматически через канал связи.
Системы ТМ, как правило, включают в себя устройства циклического опроса объектов, сравнения измеряемых величии с заданными, контроля за режимом работы оборудования и исправностью собственно системы телемеханики, а также передачи команд управления оборудованием и проверки их выполнения и т. д., что позволяет диспетчеру иметь оперативную информацию о режиме сети и при необходимости активно вмешиваться в его изменение.
Рис 7. Схема системы управления с помощью средств телемеханики с двусторонней передачей сообщений
Принято говорить о телеуправлении (ТУ), если из пункта управления (ПУ) или диспетчерского пункта на удаленные объекты с помощью устройства телемеханики передаются команды на изменение оперативного состояния оборудования. Если информация об оперативном состоянии оборудования контролируемого объекта (КП) передается в обратном направлении, то говорят о телесигнализации и телеизмерении (ТС и ТИ). В зависимости от выполняемых функций устройства соответственно называются устройствами ТУ, ТС и ТИ. Для сокращения числа каналов связи широко используются комплексные системы телемеханики, в которых устройства ТУ—ТС объединяются с устройствами ТИ. Это достигается уплотнением каналов связи, организуемых в электрических сетях по воздушным и кабельным линиям электропередачи и кабельным линиям связи, а также применением радиоканалов.
Частными случаями системы телемеханики являются системы телеконтроля, предусматривающие ТС и ТИ или только ТС с контролируемых объектов, т. е. выполняющие функции телемеханики не в полном объеме.
При условии автоматизации объекта телемеханика позволяет осуществлять управление объектом без постоянного дежурного персонала.
Передача сообщений или команд в ТУ, ТС и ТИ имеет структуру, схожую со структурой передачи сообщений в связи (телефон, телеграф, телевидение и т. п.). На рис. 8 приведена структурная схема простейшей одноканальной системы ТУ, ТС и ТИ.
Рис. 8. Схема передачи сообщений
Она включает в себя последовательно включенные источник сообщений, передающее устройство, которое состоит из преобразователей и кодирующего устройства, канал связи, приемное устройство, состоящее из обратных преобразователей и декодирующего устройства, приемник сообщений. Поскольку системы телемеханики в электрических сетях применяются для обмена сообщениями между оперативным персоналом (или ЭВМ) и объектами (подстанциями), то на входе устройств ТИ и ТС включаются датчики (первичные преобразователи), дающие информацию без участия человека, а на выходе — устройства, преобразующие сообщения в форму, которую человек может воспринимать (записывающие или указывающие приборы, устройства световой или звуковой сигнализации) или которая удобна для ввода в ЭВМ. На входе устройств ТУ устанавливаются ключи, кнопки, реле или другие устройства, а на выходе — исполнительные органы (приводы выключателей, регуляторов).
Системы связи отличаются рядом особенностей, заключающихся, например, в характере и содержании входных и выходных устройств. В телефонной связи, в частности, входными и выходными устройствами служат микрофон и телефон, а источником и приемником информации является человек.
Классификация систем телемеханики проводится но многим признакам. Применяются системы с амплитудной, частотной и фазовой модуляцией, а также с время- импульсной и широтно-импульсной модуляцией импульсного тока. Различительными параметрами в них служат соответственно амплитуда, частота и фаза переменного тока или интервал времени между импульсами или длительностью импульсов передаваемых и принимаемых сигналов по каналу связи.
По характеру передаваемых сообщений системы телемеханики разделяются на системы для передачи непрерывных и дискретных сообщений. Последние, в частности, перелают дискретные команды ТУ (включить, отключить) или сообщения о состоянии оборудования (включено, отключено), а также дискретные значения измеряемых величин.
По характеру расположения контролируемых объектов системы телемеханики разделяются на системы для сосредоточенных и рассредоточенных объектов, при этом рассредоточение объектов может быть вдоль общей линии связи или по площади. Применительно к электрическим сетям в основном используются рассредоточенные системы телемеханики, которые предусматривают подключение к общему каналу связи нескольких КП.
Вопросы теории систем телемеханики и принципы их построения, а также основные сведения о каналах телемеханики достаточно полно изложены в [6].
Практическое использование телемеханики в электрических сетях связано с применением комплекса средств диспетчерского и технологического управления: связи, сигнализации и измерений, устройств отображения информации и устройств энергопитания этого комплекса и диспетчерского пункта в целом.
В соответствии с [7] на ДПР предусматриваются средства телемеханики для оперативно-диспетчерского контроля и управления подстанциями 35—110 кВ и объектами распределительных сетей, находящимися в зоне обслуживания РРС.
Объем передаваемой с подстанции 35—110 кВ на ДПР информации определяется перспективой развития электрических сетей и формой оперативно-эксплуатационного обслуживания объектов.
При централизованном оперативном обслуживании подстанций персоналом ОВБ и полном объеме телемеханизации, включающем телеуправление, телесигнализацию и телеизмерения, на подстанции могут предусматриваться:
а) телеуправление коммутационным оборудованием, имеющим существенное значение для работы подстанции и электрической сети;
б) телесигнализация положения масляных выключателей 110, 35, 10 (6) кВ;
в) аварийно-предупредительная сигнализация (АПТС):
работа защиты — один общий сигнал; работа АПВ, АВР, АЧР — один общий сигнал; авария трансформатора (работа газовой и дифференциальной защит на отключение)—один общ.ий сигнал для всех трансформаторов;
неисправности трансформатора (перегрузка, работа первой ступени газовой защиты, перегрев, понижение уровня масла)—один сигнал с трансформатора; «земля» на секции 35 кВ — один сигнал с секции; «земля» на секции 10 кВ — то же; неисправность на подстанции (во вторичных цепях, исчезновение напряжения на подстанции, выход из строя источника электропитания)—один общий сигнал;
г) телеизмерения по вызову:
ток на трех сторонах обмотки трехобмоточного трансформатора и на одной стороне двухобмоточного трансформатора;
ток отходящих линий 110, 35 и 10 кВ; напряжение на шинах 110, 35 и 10 кВ. При ограничениях в выборе объема телемеханизации, обусловленной недостаточной информационной емкостью устройства телемеханики или отсутствием вообще возможности ТУ или ТИ, могут предусматриваться:
при прибытии на подстанцию ОВБ в течение 1ч — два общих сигнала АПТС и до шести ГС положения коммутационного оборудования;
при прибытии ОВБ в срок более 1 ч — дополнительно телеуправление коммутационным оборудованием;
для подстанций с дежурством оперативного персонала на дому — два общих сигнала АПТС и ТС положения коммутационного оборудования, передаваемых на соответствующий ДПР.
Как отмечалось, объектами телемеханизации в распределительных сетях 6—20 кВ являются РП, отдельные
ТП и РТП, секционирующие пункты и пункты АВР. Для оперативного контроля и управления этими установками предусматриваются [7]:
телесигнализация с каждого объекта в объеме трёх сигналов: положение коммутационного аппарата, «земля» в сети, контроль канала связи;
телеуправление выключателями секционирующих пунктов и пунктов АВР.
Для ТП и РП допускается не предусматривать средства телемеханики, ограничиваясь применением вызывной местной сигнализации или сообщением от потребителя о нарушении электроснабжения.
Следует отметить, что если в сетях 35 кВ и выше вывод информации на ДПР с помощью устройств ТМ практически осуществляется, то в распределительных сетях 6— 10 кВ решение этой проблемы находится в начальной стадии. Хотя и имеется эффективное направление ее решения — использование для передачи телеинформации и управления радиостанций типа ФМ с телеприставками [8], реализация этого направления сдерживается недостаточным выделением ПЭС радиостанций такого типа.
Вместе с тем уровень и объем телемеханизации подстанций 35—110 кВ, в большей мере сельскохозяйственного назначения, даже в пределах одной энергосистемы далеко неодинаковы. Причиной этого является все та же нехватка аппаратуры телемеханики. Существующее положение, когда аппаратурой ТМ комплектуется только новое строительство, а нужды и потребности эксплуатации не учитываются, ненормально. Поэтому на практике положения, предусмотренные в [7], не всегда могут быть выполнены ПЭС. Разрабатываемые и изготовляемые в энергосистемах своими силами устройства ТМ, как правило, имеют только телесигнализацию, при этом информационная емкость их невелика.
Телемеханизация распределительных электрических сетей вызывает необходимость ретрансляции получаемой информации с опорной подстанции 35—110 кВ на ДПР. Это требует принятия дополнительных мер по расширению емкости устройств ТМ на этих подстанциях. Поэтому наиболее перспективным является использование устройств ТМ нового поколения на базе микропроцессорной техники, информационные возможности которой несоизмеримы с ныне используемыми устройствами ТМ.
Вопросы организации оперативно-диспетчерской связи рассмотрены в § 5.
Страница 7: Ценник на пусконаладочные работы 2 автоматизированные системы управления (31176)
Общая стоимость пусконаладочных работ определяется как сумма цен соответствующих позиций групп 1, 2 и 3.
Наименование и техническая характеристика оборудования
Автономная наладка аппаратуры контролируемого пункта
Устройство телемеханики на стороне контролируемого пункта, категория сложности:
телеуправления, телерегулирования, вызова телеизмерения
Блок аппаратуры сопряжения канала передачи данных, категория сложности:
Схема управления, категория сложности:
Схема аварийной сигнализации с количеством датчиков до:
Блок питания аварийной сигнализации в системе ТМ
То же, стабилизированный, категория сложности:
Автономная наладка аппаратуры пункта управления
Устройство телемеханики на стороне пункта управления, категория сложности:
Наладка цепей телесигнализации, телеуправления, телерегулирования, вызова телеизмерения
Блок аппаратуры сопряжения канала передачи данных, категория сложности:
Схема управления, категория сложности:
Схема аварийной сигнализации с количеством датчиков до:
Цепь блока режима-приема и формирования команд с пульта диспетчера
Датчик вызванного телеизмерения в схеме телеизмерения по вызову
Устройство телеизмерения частотной или частотно-импульсной системы (на КП и ПУ)
Канал устройства статистической информации
Блок питания устройства статической информации
То же, стабилизированный, категория сложности:
Комплексная наладка системы телемеханики
Аппаратура сопряжения без выхода на ЭВМ, категория сложности:
Система АПД КП — АДП ПУ аппаратуры сопряжения с ЭВМ
Схема приема-передачи устройства статистической информации
Система диспетчерского управления с количеством участков до:
Проверка всего технологического комплекса в режимах работы и контроля, сдача в эксплуатацию
ТЕРМИНЫ И ИХ ОПРЕДЕЛЕНИЯ,
ИСПОЛЬЗУЕМЫЕ В ЦЕННИКЕ*
* Термины приводятся в соответствии с ГОСТ 17194-76; ГОСТ 16263-70; ГОСТ 15971-74; ГОСТ 17657-79; Стандарт МЭК. Публикация 255-3, 1971. Реле электрическое. ГОСТ 22286-76, ГОСТ 1981-83.
Технологический объект — совокупность основного технологического оборудования и реализованного на нем по соответствующим технологическим инструкциям или регламентам технологического процесса производства
Автоматизированная система управления технологическим процессом (АСУТП) — система, предназначенная для выработки и реализации управляющих воздействий на технологический объект в соответствии с принятым критерием
Комплекс технических средств автоматизированной системы управления технологическим процессом (КТС АСУТП) — совокупность вычислительных и управляющих устройств, средств преобразования, отображения и регистрации сигналов, устройств передачи и обработки сигналов и данных, исполнительных устройств, достаточная для выполнения всех функций АСУТП
Программное обеспечение АСУТП — совокупность программ, обеспечивающая функционирование АСУТП и предполагаемое развитие системы
Преобразователь измерительный — устройство, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем
Первичный измерительный преобразователь — первый в измерительной цепи преобразователь
Промежуточный измерительный преобразователь — преобразователь, следующий в измерительной цепи после первичного
Передающий измерительный преобразователь — преобразователь, предназначенный для дистанционной передачи сигнала информации
Масштабный измерительный преобразователь — преобразователь, предназначенный для изменения величины в заданное число раз
Измерительный прибор — прибор, предназначенный для выработки сигнала информации в форме, доступной для непосредственного восприятия наблюдателем
Измерительная установка — совокупность функционально объединенных средств измерений (измерительных приборов, измерительных преобразователей) и вспомогательных устройств, предназначенная для выработки сигналов информации в форме, удобной для непосредственного восприятия наблюдателем
Измерительная система — совокупность средств измерений (измерительных приборов, измерительных преобразователей) и вспомогательных устройств, соединенных между собой каналами связи, предназначенная для выработки сигналов информации в форме, удобной для автоматической обработки, передачи и (или) использования в автоматических системах управления
Сигнал измерительной информации — сигнал, функционально связанный с измеряемой физической величиной
Процессор — основная часть вычислительной машины, включающая арифметическое устройство, устройство управления и оперативную память
Оперативная память — память, предназначенная для хранения данных, непосредственно участвующих в выполнении операций, осуществляемых преимущественно арифметическим устройством и устройством управления
Запоминающее устройство — технические средства, реализующие функцию памяти
Устройство ввода-вывода — устройство, обеспечивающее в вычислительной машине ввод и вывод данных
Внешняя память — память, предназначенная для длительного хранения массивов данных и обмена данными с оперативной и буферной памятью
Канал передачи данных — канал электросвязи для передачи сигналов данных
Сигнал данных — форма представления сообщения данных, выраженных физической величиной, изменения одного или нескольких параметров которой отображает его изменение
Блок бесконтактных элементов — неразборный блок, содержащий элементы бесконтактные дискретные для управления электрическими установками общего назначения, в системах электропривода, промышленной автоматики, устройств сигнализации, измерения и защиты
Блок контактных элементов — неразборный блок, содержащий устройства с контактными элементами для управления электрическими установками общего назначения в системах электропривода, промышленной автоматики, устройств сигнализации, измерения и защиты
Контактный элемент — проводящая часть контакта электрического реле, изолированная от другой части (или других частей), когда цепь контакта разомкнута
Система сигнализации — совокупность устройств и (или) их частей, соединенных между собой каналами связи, предназначенная для выработки светового и (или) звуковых сигналов о состоянии технологического оборудования или о достижении параметра технологического процесса установленного значения
Автоматическая система регулирования (система регулирования) — автоматическая система с замкнутой цепью воздействия, в которой управляющие воздействия вырабатываются в результате сравнения значения регулируемой величины с заданным значением
Команда машинная — элементарное предписание цифровой вычислительной машине, предусматривающее выполнение некоторых операций. В команде содержится информация, определяющая действие машины в течение некоторого отрезка времени. Команда несет следующую информацию: код операции; имена объектов, участвующих в операциях; адрес результата; адрес следующей команды
Оператор языка — базовая единица действия в языках программирования
Канал — отдельное устройство (шкаф, стойка) для подключения к процессору периферийных устройств, имеющих низкую скорость передачи данных — мультиплексный канал, а также высокую скорость передачи данных — селекторный канал
Адаптер канал-канал — устройство обмена данными через каналы ввода-вывода
Функционально законченное устройство (ФЗУ) — конструктивно законченное изделие или комплект изделий, предназначенный для выполнения определенных функциональных задач в технических средствах вычислительной техники, управления, контроля, передачи информации и электросвязи различного назначения
Контролируемый пункт в телемеханике (КП) — место размещения объектов контроля, принимающих управляющее воздействие и передающих информацию на пункт управления
Пункт управления в телемеханике (ПУ) — место размещения диспетчерского оборудования
Канал связи для устройств телемеханики — совокупность технических средств, обеспечивающих прохождение сигналов между устройствами телемеханики пункта управления и контролируемых пунктов
Функциональный блок устройства телемеханики — изделие, выполняющее законченную функцию в составе устройств телемеханики и обменивающееся информационными и управляющими сигналами с другими изделиями по нормализованному сопряжению
Входной элемент телесигнализации — элемент, автоматически отражающий положение (состояние) контролируемого объекта и непосредственно воздействующий на устройство телемеханики для телесигнализации
Входной элемент телеизменения — элемент, автоматически отражающий величину измеряемого параметра
Входной элемент телерегулирования — элемент, автоматически отражающий положение регулирующего органа
Выходной элемент телесигнализации — элемент, непосредственно воспринимающий управляющий импульс из устройства телемеханики
Устройство контролируемого пункта ТК216


Комплекс телемеханики ТК216 устанавливается на телемеханическом контролируемом пункте (КП) энергообъекта и предназначен для выполнения функций по сбору информации о состоянии коммутирующей аппаратуры, значений контролируемых параметров с выдачей телеинформации на телемеханический пункт управления (ПУ), а также для телеуправления (ТУ) коммутирующими аппаратами.
Технические характеристики
Диапазон рабочих температур – от 0 до 50 ºС
Устройство смонтировано в напольном шкафу размером: 2100 (высота) х 600 (ширина) х 1000 (глубина) мм. Степень защиты шкафа от проникновения пыли и влаги – IP40
Масса устройства – не более 200 кг
Информационная ёмкость шкафов телемеханики:
- число портов RS-485 для подключения периферийного оборудования (измерительных преобразователей, счетчиков) — до 20
- число каналов ввода дискретных сигналов телесигнализации (ТС) — от 96 до 160
- число каналов двухпозиционного телеуправления коммутирующей аппаратурой (ТУ) — 16
- число каналов телесигнализации (ТС) через подключаемые контроллеры ввода-вывода — не менее 1000
- число каналов телеизмерения текущих значений параметров (ТИТ) — через подключаемые измерительные преобразователи (электросчетчики) — не менее 1000
- число каналов двухпозиционного телеуправления коммутирующей аппаратурой (ТУ) через подключаемые контроллеры ввода-вывода — не менее 100
Телемеханизация электрических установок

Назначение телемеханических устройств — осуществление контроля и управления режимом работы рассредоточенных электрических установок с центрального пункта, который называется диспетчерским пунктом (ДП), где находится дежурный — диспетчер, в функции которого входит оперативное воздействие на энергетические установки. Телемеханические устройства подразделяются на системы телесигнализации (ТС), телеизмерения (ТИ), телеуправления (ТУ) и телелегулирования (ТР).
Система ТС передает с контролируемого пункта (КП) на ДП сигналы о положении объектов, а также аварийные и предупредительные сигналы.
Система ТИ передает на ДП количественные данные о состоянии контролируемого объекта.
Система телеуправления ТУ передает с ДП на КП команды управления. Система ТР передает с ДП на КП команды регулирования.
Сигналы с ДП на КП передаются по каналам связи (КС). В качестве линий используются проводные линии (контрольные кабели, телефонные кабели и т.д.), линии передачи энергии (воздушные линии В.П., распределительная сеть Н.Н. и т.д.) и специальные линии связи (радио-релейные и т.д.).
Процесс передачи сигналов изображен на рис. 1, где ИС — источник сигнала, П -передающее устройство, ЛС — линия связи, ПР — приемное устройство, ПС — приемник сигнала (объект).
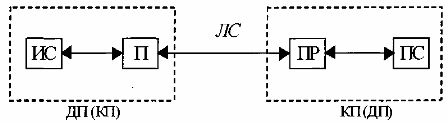
Рис.1. Схема передачи сигналов по линии связи с диспетчерского пункта на контролируемый пункт.
При ТС, ТИ на КП находятся ИС, П, на ДП — ПР, ПС. По ЛС передаются известительная (осведомительная) информация, дискретные сигналы, отражающие конечное число состояний объекта (ТС), и аналоговые или дискретные сигналы, отображающие множество состояний (ТИ).
При ТУ, ТР на ДП имеем ИС, П, на КП — ПР, ПС. По ЛС передаются распорядительная (управляющая) информация, дискретные сигналы для управления конечным числом состояний объекта (ТУ) и аналоговые или дискретные сигналы для множества состояний объекта (ТР).
Таким образом направление сигналов для ТС, ТИ — одностороннее, а для ТУ, ТР -двустороннее, поскольку для состояния ТУ необходимо отразить состояние объекта средствами ТС, а при ТР — средствами ТИ. Известительная и распредительная может иметь качественный (двоичный) характер и количественный (множественный) -аналоговый либо дискретный.
Поэтому системы телемеханики часто выполняют двойные функции: ТУ — ТС и ТР -ТИ. Так как сигналы подвергаются действию помех, то для повышения помехоустойчивости и избирательности приемного устройства, аналоговые сигналы кодируются, то есть подвергаются дискретизации и представлению информации в виде дискретных сигналов — сигналам по алгоритмам кодирования, когда каждому сигналу соответствует своя комбинация дискретных сигналов.
Преимуществом устройств телемеханики в сравнении с устройствами дистанционного контроля и управления является уменьшение числа каналов связи. В дистанционных устройствах каналы связи разделены пространственно — каждому каналу соответствует своя ЛС. В устройствах телемеханики линия связи одна, а каналы связи образуются благодаря временному, частотному, фазовому, кодовому и др. способами разделения каналов, причем по одному каналу передается значительно большее количество известительной и распорядительной информации.
Сигнал дискретной информации — это некоторое количество импульсов, отличающихся друг от друга качественными признаками (полярность, фаза, длительность, амплитуда и т.д.).
Одноэлементное кодирование сигнала позволяет передать ограниченный объем информации даже при использовании нескольких признаков. Многоэлементным кодированием можно передать значительно больший объем информации даже при использовании только двух признаков.
Одноэлементное кодирование широко применяется в устройствах телемеханники в связи с тем, что многие управляемые и контролируемые объекты являются двухпозиционными и требуют передачи лишь двух сигналов — команд. Многоэлементное кодирование применяется в тех случаях, когда число управляемых и контролируемых объектов велико, либо когда объекты многопозиционными и, соответственно, требуют передачи многих команд.
В ТУ — ТС коды используются для передачи независимых команд. В ТУ — ТС обычно используются в качестве избирающих признаков длительность импульсов либо частота. В системах ТИ — ТР коды используются для передачи числовых величин и называются арифметическими кодами. Основой этих кодов являются системы представления чисел кодовыми последовательностями.
Система телеуправление — телесигнализация (ТУ — ТС)
В системах ТУ — ТС передачу команды управления можно разделить на две позиции:
1) выбор данного объекта (избирание),
2) передача команды.
Разделение передаваемых по ЛС сигналов выполняется различными способами: по отдельным цепям, по времени передачи, по избирающим признакам при кодировании.
Широко распространены системы ТУ — ТС с коммутационным (по отдельным цепям), временным и частотным разделением сигналов.
Система с коммутационным разделением показана на рис. 2.
Объектом управления является выключатель с блок-контактами Bl, B2. В системе использованы четыре избирающих признака сигналов — положительная и отрицательная полярность и два уровня амплитуды, благодаря чему по одной двухпроводной линии можно передать четыре сигнала: 2 сигнала распорядительные (вкл.-откл.) и 2 сигнала известительные (откл., вкл.).
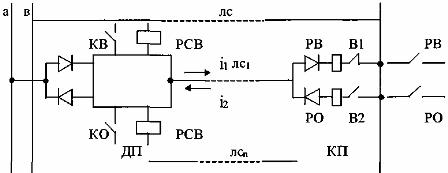
Рис. 2. Принципиальная схема системы ТУ- ТС с коммутационным разделением сигналов.
Общее число сигналов, представляемых в системе с коммутационным разделением каналов равно: N=(k-l)m
При наличии в ЛC1 минимального уровня известительного сигнала (однополупериодного распорядительного выпрямленного тока i1) срабатывает РСО. При включении KB — подаче распределительного сигнала «включить» включения выключателя, при этом замыкается В2 и в ЛС1 поступает минимальный уровень известительного сигнала (однополупериодного выпрямленного тока i2), срабатывает реле РСВ. При включении КО происходит процесс, аналогичный включению КВ.
Такие системы ТУ-ТС с коммутационным разделением сигналов используются при управлении ограниченным числом объектов при расстоянии до 1км.
Система ТУ-ТС с временным разделением сигналов передает сигналы в ЛС последовательно, могут работать циклически, постоянно контролируя объект, или спорадически — по мере надобности. Схема системы приведена на рис. 3.
Линия связи ЛС с помощью синхронно переключающихся распределителей Р1, PГ2 поочередно подключается на шагах n, n-1 к соответствующим цепям управления, а на шагах 1, 2. к цепям сигнализации.
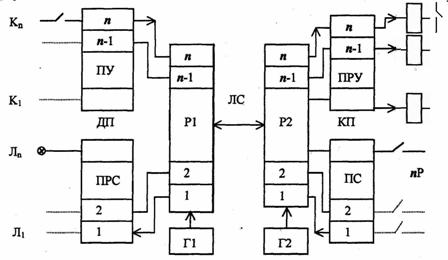
Рис. 3. Принципиальная система ТУ-ТС с временным разделением сигналов.
Избирание сигналов в этой системе может быть прямым — по одному избирающему признаку (как показано на схеме), либо комбинированным — по сочетанию избирающих признаков. При прямом избирании число сигналов, передаваемых по ЛС равно числу шагов распределителя: Nn=n При комбинированном избирании число сигналов увеличивается: Nk=kn где k — число комбинаций признаков.
В этом случае система усложняется за счет появления шифраторов и дешифраторов на стороне ДП и КП.
Система ТУ-ТС с частичным разделением сигналов передает сигналы в ЛС непрерывно, так как начало связи распределены по частоте. Таким образом по ЛС можно передавать сразу несколько сигналов. Схема системы приведена на рис. 4.
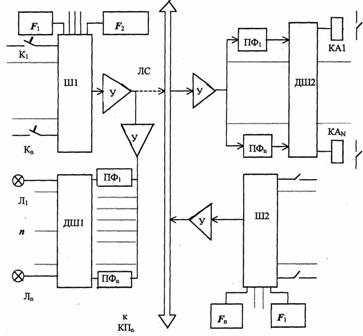
Рис. 4. Принципиальная схема системы ТУ-ТС с частотным разделением каналов
На ДП и КП имеются генераторы стабильных частот f1…fn, которые подключаются к шифраторам НИ (ДП), Ш2 (КП). Кнопками управления K1…Кn и контактами реле объекта P1. Pn.
Если кодирование одноэлементное, то каждому сигналу распределенному и известительному сигналу соответствует своя несущая частота.
Разделение сигналов производится полосовыми фильтрами ПФ на ДП и КП, благодаря чему в принципе возможна передача всех сигналов в один и тот же момент времени. Многоэлементное кодирование позволяет сократить количество генераторов и полосовых фильтров, а также сузить полосу частот сигналов. Для этого используются шифраторы и дешифраторы на стороне ДП и КП, осуществляющие кодирование и декодирование сигналов.
Систему ТУ-ТС с временным и частотным разделением каналов в настоящее время строятся на логических элементах с использованием микросхемотехники.
Системы телеизмерения (ТИ)
В системе ТИ передача продляемого параметра представляет собой три операции:
1) выбор объекта продления (измеряемого параметра)
2) преобразование величины
На КП измеряемый параметр преобразуется в величину, удобную для передачи на расстояние, на ДП эта величина преобразуется в показание измерительного, либо регистрирующего прибора.
Разделение передаваемых по ЛС сигналов также выполняется коммутационным, временным, частотным способом, используется и кодовое разделение сигналов. Системы ТИ разнообразны по виду сигнала. Различают системы аналоговые, импульсные и частотные.
В аналоговых системах в ЛС передается непрерывная величина (ток, напряжение). В импульсных — последовательность импульсов или кодовая комбинация. В частотных -переменный ток звуковых частот.
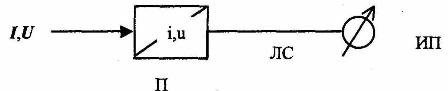
Рис. 5. Структурная схема аналоговой системы телеизмерений.
Аналоговая система ТИ показана на рис. 5. Передатчик, в качестве которого используется преобразователь П соответствующего параметра в ток (напряжение) подключается к проводной линии ЛС.
Передатчиком обычно являются преобразователи выпрямленного типа (ток, напряжение), либо индукционного (мощность, cos ). Типовые выпрямленные преобразователи тока (ВПТ-2) и напряжения (ВПН-2) показано на рис. 6 и 7.
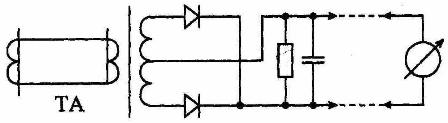
Рис. 6. Схема выпрямительного преобразователя тока (ВПТ-2)
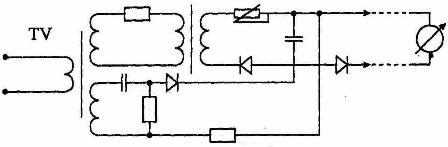
Рис. 7. Схема выпрямительного преобразователя напряжения (ВПН-2)
Импульсные системы ТИ имеют несколько разновидностей, отличающихся способами представления аналогового параметра импульсными сигналами. Существуют число-импульсные, кодо-импульсные и частотно-импульсные системы ТИ, использующие соответствующие преобразователи, показанные на рис. 8.
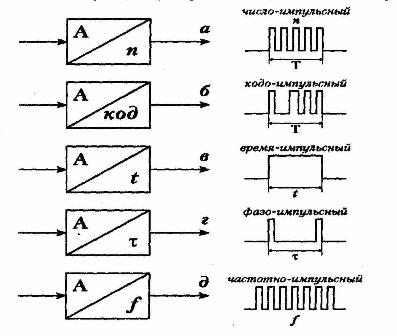
Рис. 8. Преобразователи аналогового параметра в импульсный сигнал.
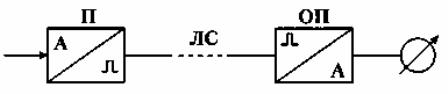
Рис. 9. Блок-схема импульсной системы ТИ
Импульсная система ТИ показана на рис. 9. Передатчиком является соответствующий преобразователь П, посылающий в ЛС импульсы, представляющие своими характерными параметрами аналоговую величину. Обратное преобразование осуществляется преобразователем ОП. Передатчики импульсных систем ТИ являются импульсными генераторами на микросхемах.
Частотные системы ТИ используют синусоидальные сигналы, своей частотой представляющие аналоговый параметр. Частотные системы используют преобразователи — генераторы синусоидальных колебаний, управляемые током, либо напряжением.
Частотная система ТИ показана блок-схемой рис. 11.
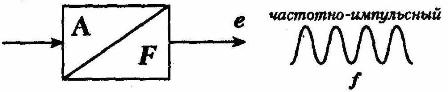
Рис. 10. Преобразователь частотной системы ТИ.

Рис. 11. Блок-схема частотной системы ТИ.
Обратное преобразование, осуществляемое ОП, может производиться как в аналоговую величину, так и в десятичный код, для индикации цифровыми приборами с АЦПУ.
Импульсные и частотные системы ТИ обладают большой дистационностью измерений, в качестве линий связи могут использовать кабельные линии и воздушные линии, имеют высокую помехоустойчивость, а так же могут легко вводиться в ЭВМ при использовании соответствующих преобразователей частота — код, код — код.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети: