АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ. С первых шагов цивилизации человек пытался механизировать труд. Он очень быстро нашел пути замены мускульной энергии механической; высшей точкой этого начального периода технического прогресса была промышленная революция 18 в. Новая эпоха началась, когда человек научился производить и распределять энергию. К 20 в. в передовых странах механическая энергия, получаемая от пара, текущей воды и электричества, в основном заменила энергию человека и животных. Когда стали доступны большие количества энергии, интерес общества сместился на управление такой энергией.
Также по теме:
АВТОМАТИЗАЦИЯ
Следующий важный этап в развитии техники, называемый иногда второй промышленной революцией, начался в 1930-х годах. Эта революция была связана не с изобретением принципиально новых механических устройств, а скорее с реализацией некоторой идеи, а именно идеи саморегулирования (рис. 1), которая является фундаментальной характеристикой неисчислимых естественных процессов. Хотя существование саморегулирующихся процессов в природе было замечено людьми давно, только в 20 в. были сформулированы и систематически разработаны принципы автоматического регулирования. Применение этих принципов открыло новую эру в технике и промышленности.
См. также АВТОМАТИЗАЦИЯ.
Понятие обратной связи.
Также по теме:
СЕРВОМЕХАНИЗМ
Важной особенностью большинства управляемых процессов является обратная связь. Понятие обратной связи можно легко проиллюстрировать с помощью простого примера моряка, управляющего кораблем с помощью рулевого колеса (рис. 2). Штурвальный выдерживает курс судна в соответствии с заданными командами. Этот метод управления, обозначаемый термином «управление с разомкнутым контуром», страдает несколькими серьезными недостатками. Так, при изменении характеристик привода – исполнительного механизма, изменяющего положение руля, – судно будет сбиваться с курса, если рулевой не имеет никакой информации о действительном направлении движения.
Также по теме:
СИСТЕМОТЕХНИКА
Если бы рулевой постоянно следил за курсом судна по компасу, сравнивал его с заданным и вращал штурвал так, чтобы уменьшить выявленную ошибку, судно приблизительно выдерживало бы нужный курс (рис. 3). Можно заметить, что в этом случае штурвальный выполняет три основные функции – обнаруживает отклонение действительного исполнения от заданного, принимает решение о коррекции действия и реализует его с помощью штурвала. Эти действия по обнаружению и коррекции ошибки, а также по управлению показаны на рис. 3 как обратная связь от управляемой величины к управляющей. В такой системе фигурирует не только направление движения корабля, задаваемое положением штурвала, но и само положение штурвала зависит от этого направления. Взаимозависимость двух величин – положения штурвала и курса судна – определяет концепцию, называемую в инженерной среде обратной связью, а термин «автоматические системы управления» обычно относится к автоматическим системам, построенным на этой концепции; часто такие системы называются также «системами управления с обратной связью» или «системами с замкнутым контуром».
Теперь можно дать формальное определение систем с замкнутым контуром: система с замкнутым контуром есть система, в которой истинное состояние управляемой переменной (называемое «выход») непрерывно сравнивается с желаемым состоянием (называемым «вход»), и сигнал, пропорциональный разнице между этими двумя состояниями, воздействует на управляющий элемент с целью уменьшить ошибку. В этом определении ничего не говорится об энергии, требуемой для изменения выхода, или об энергии, имеющейся на входе. Как правило, на вход системы управления подается небольшая энергия, а энергия для выхода черпается из внешнего источника. Таким образом, особенностью большинства систем автоматического управления является значительное усиление мощности.
Принцип действия и проектирование.
Автоматические системы управления могут быть разделены на две основные группы: стабилизирующие и следящие. В следящих системах (сервомеханизмах) входной сигнал меняется произвольно и зачастую непрерывно, тогда как в стабилизирующих ему задается фиксированное значение, а цель управления – сохранить выход постоянным, несмотря на флуктуации нагрузки. Термостат, у которого выходом является фиксированная температура, и стабилизатор напряжения, выходом которого служит нужное напряжение в сети, являются примерами стабилизирующих систем. В качестве примеров сервомеханизмов можно назвать радиолокационные и артиллерийские системы наведения и автопилоты, управляющие положением и направлением движения летательных аппаратов.
См. также СЕРВОМЕХАНИЗМ.
Автоматическая система управления не может функционировать без некоторой ошибки, потому что именно эта ошибка является источником управляющего сигнала. Задача проектировщика системы управления – сделать эту ошибку как можно меньше и тем самым увеличить чувствительность системы. Эта задача связана с определенными ограничениями, что становится ясно из следующего примера. Система управления с обратной связью, показанная на рис. 4, нужна для наведения тяжелого орудия с высокой точностью; она состоит из детектора ошибки, усилителя и серводвигателя. Ключевым элементом системы является прибор, который обнаруживает рассогласование угловых направлений цели и орудия, вырабатывая пропорциональный ему сигнал. Этот «сигнал ошибки», обычно очень малый, усиливается и прилагается в виде напряжения к одной из обмоток возбуждения электродвигателя, который развивает вращающий момент, пропорциональный указанному напряжению. Этот вращающий момент перемещает ствол орудия в направлении, приводящем к уменьшению ошибки.
Если направление на цель изменяется, то орудие следует за ним. Однако по инерции орудие будет проскакивать нужное положение, приводя к появлению ошибки с противоположным знаком. Это, в свою очередь, заставит серводвигатель повернуть орудие в обратном направлении. Следовательно, орудийный ствол может рыскать туда-сюда, проскакивая правильное положение. Такой режим работы системы управления называется «автоколебательным» и является принципиальным ограничением управления с обратной связью. (Например, при запаздывании сигнала обратной связи на 180 ° происходило бы усиление колебаний.) Поэтому главная проблема, которая встает перед проектировщиком систем управления, заключается в предотвращении неконтролируемых колебаний при одновременном сохранении высокой чувствительности системы к управляющему сигналу.
Первым очевидным решением является минимизация запаздывания сигнала обратной связи путем использования приборов с малым временем реакции. Это может улучшить устойчивость системы, но обычно не решает проблемы полностью. Кроме того, в большинстве практических ситуаций проектировщик вынужден использовать существующие элементы системы, что диктуется соображениями веса и стоимости.
Вторая и наиболее распространенная процедура – применение в контуре корректирующих звеньев (рис. 5), нейтрализующих эффект запаздывания. При отсутствии таких компенсаторов управляющий сигнал представляет собой усиленную ошибку и имеет тот же знак, что и ошибка. Если компенсатор вырабатывает составляющую сигнала, пропорциональную производной от ошибки по времени, то общий управляющий сигнал будет уменьшаться и станет отрицательным прежде, чем система «промахнется». Это воспрепятствует вхождению системы в режим автоколебаний. Такой способ компенсирующего управления называется «фазовым упреждением» или «управлением с дифференцирующей цепочкой».
Вернемся к нашему примеру об управлении курсом корабля. На любом достаточно большом корабле его реакция на поворот штурвала настолько замедленна, что, если рулевой перекладывает штурвал вправо только тогда, когда корабль явно отклоняется влево от правильного курса, это вызовет лишь увеличение амплитуды колебаний относительно курса. По этой причине рулевой должен предвидеть каждое отклонение и, чтобы уменьшить колебания, раньше перекладывать штурвал в противоположном направлении.
Другим видом компенсирующего элемента является прибор с интегрирующей цепочкой, который игнорирует малые быстро флуктуирующие сигналы ошибки и принимает во внимание только монотонную составляющую. Это уменьшает эффект обратной связи на высоких частотах, но сохраняет его силу на низких частотах. Поскольку большинство систем управления с обратной связью адекватно реагирует только на низкочастотные сигналы, такая компенсация повышает точность. В большинстве систем управления упомянутые компенсаторы могут быть механическими или электрическими, и проектировщик имеет полную свободу в их подборе для достижения наилучшей эффективности.
Еще один метод улучшения управления – введение дополнительных (вторичных) контуров обратной связи, в которых могут вырабатываться любые нужные составляющие сигнала. В конкретной ситуации проектировщику предоставляется выбор комбинации из самых последних методов, обеспечивающих правильное проектирование системы управления.
В рассмотренных выше случаях предполагается, что управляемый процесс или объект неизменны, а система управления и компенсирующие элементы подгоняются под процесс. С ростом потребности в управлении во многих отраслях промышленности и техники нет ничего необычного в том, что сами установки проектируются так, чтобы получить максимум преимуществ от использования последних достижений теории управления. В таких случаях сама установка становится частью системы управления. Действительно, по мере усложнения систем с обратной связью среди конструкторов и специалистов по управлению растет осознание того, что, хотя различные части системы, например ракеты, могут исследоваться и анализироваться независимо, сама система должна проектироваться как единое целое. Этот аспект проектирования сложных систем приобрел важное значение и получил название «системного анализа», или «системотехники».
См. также СИСТЕМОТЕХНИКА.
Сложные системы управления.
Любые самые сложные системы управления – будь то самолет, ядерный реактор или даже государство – включают функции оценки состояния, выработки сигнала обратной связи и управления. Главная задача любой системы управления – сделать выходные сигналы близкими к нужным значениям как можно быстрее и точнее. Другой важной характеристикой системы управления является ее устойчивость, т.е. ситуация, когда ее выходные сигналы не превышают заданных пределов. Следовательно, устойчивость, быстродействие и точность рассматриваются в качестве основных целей при проектировании эффективной системы управления. Однако в некоторых системах увеличение быстродействия сверх определенного предела может вызвать снижение точности и даже привести к неустойчивости. Поэтому достижение наилучшего соотношения между этими характеристиками является одной из важнейших задач проектирования системы управления.
В динамической системе, т.е. в такой системе, характеристики которой изменяются в зависимости от времени и места, три фактора осложняют задачу управления: 1) система имеет большое число входов и выходов; 2) имеется неточность в измерении характеристик или знании системы; 3) поскольку характеристики системы все время изменяются, может оказаться затруднительным расчет требуемых управляющих сигналов.
Чтобы количественно оценить влияние входов системы на ее выходы, нужна математическая модель этой системы. Для этого может быть применен компьютер. Вообще, компьютер используется во всех сложных системах, выполняя операции оценки состояния, выработки сигнала обратной связи и управления. В 1960-х годах были разработаны основы современной математической теории оптимального управления. Они позволяют генерировать управляющие сигналы, которые оптимизируют тот или иной показатель эффективности – например, время, энергию, расход топлива или стоимость – в больших системах, для которых могут быть разработаны точные математические модели.
Адаптация, обучение и искусственный интеллект.
В реальном мире большинство систем не только изменяются в зависимости от времени и места, но и не могут быть представлены точными математическими моделями. Необходимость управлять такими системами привела к созданию новых теорий адаптации, обучения и самоорганизации. Это, в свою очередь, привело к появлению сложных систем управления с обратной связью, в которых компьютер выполняет эксперименты над системой, исследует ее характеристики в процессе работы и меняет стратегию управления. Можно сказать, что такие системы управления имитируют адаптивные способности живых организмов в изменяющихся и неопределенных условиях среды. Таким образом, вообще говоря, адаптивная система управления требует двух различных операций: идентификации характеристик управляемой системы и настройки параметров управляющей системы с учетом динамики управляемой.
Другой областью исследований, оказывающей существенное влияние на проектирование сложных автоматических систем, является теория обучения. Идеи, развитые в математической психологии, могут быть применены к проектированию систем, использующих обратную связь по состоянию, что позволяет выбрать оптимальное действие из конечного набора действий. Распознавание образов – одна из форм обучения, нашедшая применение в некоторых современных системах с обратной связью. Если управляемая система имеет конечное число состояний, а параметры оптимального управления, соответствующие каждому состоянию, сохраняются в памяти компьютера, то скорость адаптации системы управления может быть существенно повышена с помощью устройства распознавания. Например, на космическом корабле распознавание состояния по измерениям температуры, влажности, давления, вибраций, радиации и т.п. является задачей распознавания образов.
Кроме исследований, упомянутых выше, многое делается в области разработки искусственного интеллекта, который включает более высокие уровни обратной связи, такие, как поиск информации, перевод с одного языка на другой, игры, доказательство теорем и решение комплексных проблем. Эти идеи начинают находить применение в различных областях современной науки и технологии. Электроника и компьютерные технологии, особенно разработка микропроцессоров, открыли новые пути применения теорий управления, основанных на сложных формах обратной связи. Человечество вступает в эру, где какие-либо применения будут ограничиваться только состоянием теории и воображением проектировщика.
См. также ИНТЕЛЛЕКТ ИСКУССТВЕННЫЙ; КОМПЬЮТЕР; ЭЛЕКТРОННАЯ ПРОМЫШЛЕННОСТЬ; ИНФОРМАЦИИ НАКОПЛЕНИЕ И ПОИСК; ИНФОРМАЦИИ ТЕОРИЯ.
Также по теме:
Литература:
Нетушил А.В. и др. Теория автоматического управления. М., 1983
Абдуллаев Н.Д., Петров Ю.П. Теория и методы проектирования оптимальных регуляторов. Л., 1985
Первозванский А.А. Курс теории автоматического управления. М., 1986
Зайцев Г.Ф. Основы автоматического управления и регулирования. Киев, 1988
Информатика. Нужно написать пример на каждую систему управления, подробности внутри
вообщем существует 2 системы управления: система управления без обратной связи и система управления с обратной связью и мне нужно написать по одному примеру на каждую систему.
на уроке я понял как это делать а сейчас спустя неделю уже забыл 😀
Дополнен 13 лет назад
нет 😀 мне нужны примеры этих систем
Голосование за лучший ответ
Без обратной связи: стандартный обогреватель в комнате — независимо от температуры в комнате, он греет ее непрерывно — то есть, вне зависимо от входных сигналов о состоянии (температуре) управляемого объекта
С обратной связью — климат-контроль в авто — в зависимости от температуре в автомобиле, система поддерживает требуемый ее уровень. Посредством контура обратной связи, климат-контроль получает входные сигналы о состоянии объекта и преобразует их в выходные действия — нагревание, охлаждение
Учись студент — [ссылка заблокирована по решению администрации проекта] — Прямая и обратная связь управления
Управление с обратной связью

первичное ознакомление, отработка и осознание теоретических моделей и понятий, выявление и анализ существенных и устойчивых связей и отношений между объектами и процессами, анализировать систему отношений в живой природе и технических системах с позиций управления, определять в простых ситуациях механизмы прямой и обратной связи.
Просмотр содержимого документа
«Управление с обратной связью»

Управление с обратной связью

Управление и кибернетика
Печатать книги
Выполнять чертежи
Использовать для управления
Производить расчёты
Управляющее воздействие производится в разных формах:
- нажимает клавишу поворачивает ручку управления телевизором
- нажимает клавишу
- поворачивает ручку управления телевизором
- управляет движением автомобилей управляет движением пешеходов на перекрестке
- управляет движением автомобилей
- управляет движением пешеходов на перекрестке
- голосом подает команду собаке
- голосом подает команду собаке
Световые сигналы светофора шофер воспринимает как команды:
Приготовиться
Обратная связь
- Строго в соответствии со схемой работает только система «светофор – автомобили». Светофор «не глядя» управляет движением машин, не обращая внимания на обстановку на перекрестке.
- Иначе протекает процесс управления телевизором или собакой. Прежде чем отдать очередную команду, человек смотрит на состояние объекта управления, на результат выполнения предыдущей команды. Если он не нашел нужную передачу на данном канале, то он переключит телевизор на следующий канал; если собака не выполнила команду «лежать!», хозяин повторит эту команду.
- Управление происходит эффективнее, если управляющий не только отдает команды, т.е. работает прямая связь , но и принимает информацию от объекта управления о его состоянии. Этот процесс называется обратной связью .
- Обратная связь— это процесс передачи информации о состоянии объекта управления управляющему объекту.
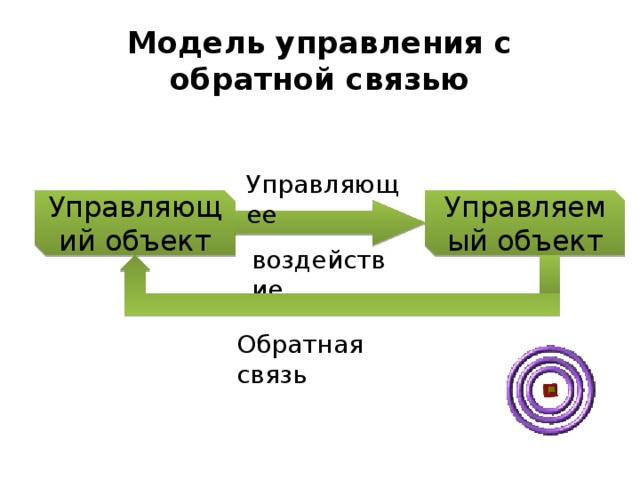
Модель управления с обратной связью

Линейный алгоритм
Светофор «не глядя» управляет движением машин, не обращая внимания на обстановку на перекрестке
Алгоритм с ветвлением
Если вместо светофора на перекрестке дорог работает полицейский-регулировщик, то управление движением станет более рациональным. Регулировщик следит за скоплением машин на пересекающихся дорогах и дает «зеленую улицу» в том направлении, в котором в данный момент это нужнее. Нередко из-за «безмозглого» управления светофора на дорогах возникают «пробки». И тут непременно приходит на помощь регулировщик.
Алгоритм с ветвлением
ЕСЛИ НА ДОРОГЕ-1 СКОПИЛОСЬ БОЛЬШЕ МАШИН
ТО ОТКРЫТЬ ДВИЖЕНИЕ ПО ДОРОГЕ-1
ИНАЧЕ ОТКРЫТЬ ДВИЖЕНИЕ ПО ДОРОГЕ-2
ВКЛЮЧИТЬ ТЕЛЕВИЗОР НА 1-М КАНАЛЕ
ПОКА НЕ БУДЕТ НАЙДЕНА ИСКОМАЯ ПЕРЕДАЧА,
ПЕРЕКЛЮЧИТЬ ТЕЛЕВИЗОР НА СЛЕДУЮЩИЙКАНАЛ
- В варианте управления без обратной связи алгоритм может представлять собой только однозначную (линейную) последовательность команд .
- При наличии обратной связи и «интеллектуального» управляющего объекта алгоритмы управления могут иметь сложную структуру, содержащую альтернативные команды (ветвления) и повторяющиеся команды (циклы)
- содержащие ветвь обратной связи
- содержащие ветвь обратной связи
- не содержащие ветвь обратной связи
- не содержащие ветвь обратной связи
- Обратная связь , обратное воздействие результатов процесса на его протекание или управляемого процесса на управляющий орган.
- Обратная связь характеризует системы регулирования и управления в живой природе, обществе и технике.
Обратная связь
- результаты процесса усиливают его действие
- результаты процесса усиливают его действие
Положительная
- результаты процесса ослабляют его действие
- результаты процесса ослабляют его действие
Отрицательная
- Отрицательная обратная связь стабилизирует протекание процессов.
- Положительная обратная связь , напротив, обычно приводит к ускоренному развитию процессов и к колебательным процессам.
- В сложных системах (например, в социальных, биологических) определение типов обратная связь затруднительно, а иногда и невозможно.
Обратную связь различают по виду преобразования воздействия в цепи
Дифференцирующую
Интегрирующую

Автоматические
Неавтоматические
Автоматизированные
В зависимости от степени участия человека в процессе управления системы управления деется на три класса
Автоматические системы управления
В системах автоматического управления все процессы, связанные с получением информации о состоянии управляемого объекта, обработкой этой информации, формированием управляющих сигналов и пр., осуществляются автоматически.
В подобных системах не требуется непосредственное участие человека. Системы автоматического управления используются на космических спутниках, на опасном для здоровья человека производстве, в ткацкой и литейной промышленности, в хлебопекарнях, при поточном производстве, при изготовлении микросхем, и пр.
Неавтоматические системы управления
В неавтоматических системах управления человек сам оценивает состояние объекта управления и на основе этой оценки воздействует на него.
Дирижер управляет оркестром, исполняющим музыкальное произведение. Учитель на уроке управляет классом в процессе обучения, водитель управляет автомобилем.
Автоматизированные системы управления
В автоматизированных системах управления сбор и обработка информации, необходимой для выработки управляющих воздействий, осуществляется автоматически, при помощи аппаратуры и компьютерной техники, а решение по управлению принимает человек.
Автоматизированная система продажи железнодорожных, автобусных или авиационных билетов, льготных проездных билетов работает под управлением человека, который запрашивает у компьютера необходимую информацию и на ее основе принимает решение о продаже.
Совокупность информационных потоков, средств обработки, передачи и хранения данных, а также сотрудников управленческого аппарата, выполняющих операции по переработке данных, составляет информационную систему управления объектом.
- между компьютером и объектом управления должна быть обеспечена прямая и обратная связь
- между компьютером и объектом управления должна быть обеспечена прямая и обратная связь
- в память компьютера должна быть заложена программа управления (алгоритм, записанный на языке программирования)
- в память компьютера должна быть заложена программа управления (алгоритм, записанный на языке программирования)
Для функционирования информационной системы :
Программное управление широко используется в технических системах:
автопилот в самолете
автоматическая линия на заводе
ускоритель элементарных частиц
атомный реактор на электростанции
Тематический диктант
- Кто, где и когда провозгласил рождение новой науки связанной с разработкой теории управления?
- Что такое управление?
- Изобразить схему процесса управления без обратной связи, привести примеры.
- Изобразить схему процесса управления с обратной связью, привести примеры.
- Что называется обратной связью?
- Виды обратной связи.
- Перечислить три класса процессов управления.

-75%
Автоматические устройства от древнего мира до начала промышленной революции

Данный материал открывает цикл статей, посвященных истории автоматического управления техническими системами. Представлены ранние автоматы для торговли, богослужения и более совершенные механизмы (андроиды) средневековья, а также устройства с обратной связью: часы Ктезибия, регуляторы температуры (Дреббеля) и давления (Папена), ветряк Эдмунда Ли. Анализируются основные особенности этапа.
АЛЕКСАНДР МИКЕРОВ, д. т. н., проф. каф. систем автоматического управления СПбГЭТУ «ЛЭТИ»
На самой заре своего развития человек пытался использовать различные приспособления, действующие без его участия, то есть самостоятельно. Древнегреческое слово «автоматика» и обозначает «самодействие». Такие самодействующие машины в виде ловушек и капканов широко использовались, к примеру, на охоте. Описание многих интересных автоматов оставил нам смотритель библиотеки знаменитого Александрийского маяка Герон Александрийский (Ἥρωνὁ Ἀλεξανδρεύς) в книге «Пневматика», написанной в I в. н. э. В ней показаны известные автоматы Древнего Египта, начиная со II в. до н. э., в том числе для продажи воды или вина, открывания дверей храма, зажигания священного огня и т. д. [1].

Рис. 1. Автомат для продажи святой воды
На рис. 1 показано устройство автомата для продажи святой воды. Вода из резервуара 1 отпускается при открытии клапана 2 рычагом 3, на который опускается монета 4. Более сложный механизм приводил в движение двери храма (рис. 2).
Двери 1 раздвигаются двумя воротами 2, поворот которых осуществляется грузом 3 и бадьей с водой 4.
Наполнение бадьи начинается при разжигании священного огня 5, металлическая чаша которого через стержень нагревает воду в баке 6. При этом образуется пар, вытесняющий воду из бака 6 в бадью 4. После того как огонь гаснет, вода из бадьи всасывается обратно в бак и двери закрываются.
С изобретением Христианом Гюйгенсом (Christiaan Huygens) в 1673 г. часового механизма с маятником большой популярностью стали пользоваться диковинные механические игрушки, имитирующие внешний облик и поведение животных и человека («автоматоны» или «андроиды»). Примером может послужить утка, принимающая пищу (рис. 3), созданная механиком Жаком де Вокансоном (Jacques de Vaucanson) в 1739 г. [2]. Сохранился также железный рыцарь Леонардо да Винчи (Leonardo di ser Piero da Vinci), двигающий головой и руками.
Особенность всех этих механических автоматов в том, что они работают по жесткому алгоритму или программе. Первым примером применения обратной связи в автоматических устройствах является поплавковый регулятор уровня, известный уже во II в. до н. э., который до сих пор исправно действует, например в нашем бытовом оборудовании [3].

Рис. 2. Автомат для открывания дверей храма
Поплавковый регулятор был применен в водяных часах александрийского ученого Ктезибия (Κτησίβιος), построенных в II веке до н. э. [4, 5]. Рис. 4а иллюстрирует их принцип действия, а рис. 4б — внешний вид. Вода из верхнего резервуара через сопло 1, прикрываемое поплавком 2, поступает в резервуар 3, откуда и вытекает через мерное отверстие 4 в накопитель (нижний бак) 5. По мере наполнения накопителя поплавок 6 поднимает указатель, отмечающий время, по циферблату 7.
В данном случае использовано два автоматических устройства:
- поплавковый регулятор уровня воды в баке;
- водяной интегратор, отмеряющий уровень воды в накопителе, пропорциональный времени.
Поплавковый регулятор уровня обеспечивает постоянный напор воды в баке 3, а следовательно, и стабильную скорость подъема воды в накопителе, реализуя важнейший принцип регулирования — обратную связь. В данном случае поплавок соединяет функции чувствительного (измерительного) элемента и исполнительного механизма.

Рис. 3. Автомат Вокансона
Фактически часы Ктезибия имели более сложное устройство. Дело в том, что в Древнем Риме сутки имели 12 дневных и 12 ночных часов, продолжительность которых была разная, так как определялась длиной светового дня, зависящей от времени года. Поэтому в этих часах циферблат был нанесен на вращающийся барабан 8 (рис. 4б), поворачивающийся на один оборот в год с помощью не показанного на рисунке дополнительного водяного механизма в основании. Часы Ктезибия были единственной альтернативой солнечным или песочным часам вплоть до XIV в., когда им на смену пришли механические часы без маятника, а затем, с XVII в., и с маятником.
После падения Западной Римской империи развитие науки и техники в Европе приостановилось, и только на Арабском Востоке известно применение поплавковых регуляторов и водяных часов в VIII—XII вв. [3, 6].
Начиная с XVII в., в связи с развитием техники, в Европе появляются новые регуляторы с обратной связью:
- регулятор температуры Дреббеля;
- регулятор давления Папена;
- регуляторы ветряных и водяных мельниц.

Рис. 4. Водяные часы Ктезибия: а) принцип действия; б) внешний вид
Знаменитый голландский ученый Корнелиус Дреббель (Cornelius Jacobszoon Drebbel) изобрел в начале XVII в. инкубатор для цыплят, который оснастил ртутным термостатом. Его чертежи не сохранились, однако по описаниям можно составить следующее представление об устройстве (рис. 5) [3, 4, 6].
Внутри камеры инкубатора 1, нагреваемой, например, спиртовкой 2, размещен чувствительный элемент — сосуд со спиртом 3, соединенный с U-образной трубкой 4, заполненной ртутью и закрытой поршнем 5, воздействующим на рычаг клапана 6 вентиляционного отверстия. Таким образом, перегрев камеры приводит к расширению спирта и открытию вентиляции. Регулятор был снабжен винтовым устройством выставки температуры. В данном случае чувствительный элемент и исполнительный механизм с U-образной трубкой и поршнем разделены, однако усилие на поршне создается, в конечном счете, чувствительным элементом.
Дреббель известен также как создатель одной из первых подводных лодок и изобретатель мощного микроскопа. Совершенствование термостатов инкубаторов продолжил французский ученый Рене-Антуан Реомюр (Ren? Antoine de R?aumur), предложивший также температурную «шкалу Реомюра» [7].

Рис. 5. Термостат Дреббеля
В 1707 г. французский физик и математик Дени Папен (Denis Papin), ассистент Гюйгенса, построил одну из первых паровых машин, паровой котел 1 которой, показанный на рис. 6, был оснащен предохранительным клапаном 2 с грузом 3 [3].
Регулируя положения груза, можно было задавать предельное давление сброса пара из котла. До сих пор все паровые котлы оснащаются подобными клапанами. Более совершенным автоматическим устройством был механизм разворота ветряной мельницы. В Средние века такие мельницы широко распространились по всей Европе. Башня ветряной мельницы сначала была неподвижной, затем ее стали разворачивать по ветру и, наконец, были созданы башни с ветровым колесом на поворотной крыше. Сейчас ветровые колеса ветрогенераторов поворачиваются вертикальными рулями на хвосте, но в Средние века несовершенство опор требовало настолько больших усилий, что плоскости на хвосте не могли с этим справиться, поэтому разворот крыши выполнялся обычно вручную.

Рис. 6. Паровой котел с клапаном Папена
В ветряке английского кузнеца Эдмунда Ли (Edmund Li), первый патент на который был получен в 1745 г., для разворота крыши использовано дополнительное ветровое колесо [3, 6, 8]. Принцип действия механизма показан на рис. 7а, где: 1— основное рабочее ветряное колесо мельницы; 2 — дополнительное ветряное колесо, ось вращения которого перпендикулярна оси рабочего колеса; 3 — неподвижная азимутальная шестерня, установленная на башне; 4 — червячный редуктор привода. Оба ветряных колеса установлены на вращающейся крыше. Когда направление ветра не совпадает с осью вращения рабочего колеса 1, дополнительное ветряное колесо 2 через редуктор 4 поворачивает всю крышу до такого положения, когда плоскость дополнительного колеса будет совпадать с направлением ветра, и поворот крыши прекратится.
На рис. 7б показан современный вид голландской мельницы с таким механизмом разворота [8]. Нетрудно заметить, что дополнительное ветряное колесо является одним из первых примеров сервомотора, скорость вращения которого увеличивается с увеличением угла рассогласования между направлением ветра и осью рабочего ветряного колеса. Дополнительное ветряное колесо играет также роль чувствительного элемента и источника энергии регулятора.

Рис. 7. Ветряк Эдмунда Ли
* * *
Таким образом, ранний этап развития автоматизации вплоть до широкого внедрения паровых машин отличается следующими особенностями:
- Первые самодействующие устройства (автоматы), появившиеся задолго до новой эры, как правило, работали по жесткому алгоритму и использовались не для утилитарных или производственных целей, а для богослужения или развлечений.
- Изобретение в конце XVII в. часового механизма привело к созданию весьма совершенных программируемых механических автоматов-игрушек (андроидов), имитирующих внешние черты и поведение животных или человека.
- Первым автоматическим устройством с обратной связью был поплавковый регулятор уровня, примененный в водяных часах Ктезибия (II в. до н. э.), в котором чувствительный элемент был совмещен с исполнительным механизмом в форме поплавка.
- Развитие промышленности привело к созданию более совершенных регуляторов с обратной связью: температуры (Дреббеля), давления (Папена), ветряной мельницы (Эдмунда Ли). Во всех случаях энергия, необходимая для работы регулятора, вырабатывалась самим чувствительным элементом, который в регуляторе Дреббеля был отделен от исполнительного механизма.
- Во всех регуляторах этого периода проблема устойчивости замкнутой системы, по существу, не возникала вследствие их низкой точности и малого быстродействия. Как следствие, не было ни специальной науки, ни отдельной отрасли производства автоматических устройств. Тем не менее для изготовления и подбора параметров таких регуляторов требовались весьма умелые механики.
Первые регуляторы не нашли широкого распространения, поскольку с задачами, которые они решали, легко справлялся и человек, труд которого был дешев, что делало применение сложных автоматических механизмов нерентабельным. Дальнейшее развитие регуляторы получили в XVIII в. в связи с началом широкого применения паровых машин, стабильная работа которых без регуляторов практически невозможна.