Чем робот отличается от автомата
Современные автомобили оборудуются разными типами коробок передач и потребителю особенно при покупке своей первой машины бывает тяжело сделать правильный выбор среди этого разнообразия трансмиссий.
Поэтому в этой статье попробуем понять, чем отличается коробка автомат от робота или вариаторной трансмиссии, именно этот вопрос волнует многих будущих автовладельцев.
Отличие робота от автомата
Коробка автомат. Как вы знаете, в состав автоматической коробки передач входят два основных узла — это гидротрансформатор и редуктор. Гидротрансформатор обеспечивает плавное и безрывковое переключение передач, по сути, он работает вместо сцепления, которое есть на машинах с механической коробкой передач.
Редуктор автомата состоит из определённого набора шестерёнок и пакетов фрикционных дисков, они находятся в зацеплении и образуют несколько ступеней: 4, 5, 6 и даже 8,9.
Из-за особенностей конструкции, автоматическая коробка передач исходя от оборотов мотора и нагнетания масляного давления сама переключает ступени (скорости), без вмешательства водителя. Благодаря такому переключению скоростей, электроника используется по минимуму — такая система использовалась ранее(в полностью гидравлических АКПП, автомобилях выпущенных перимущественно до 2000 года). В современных Автоматических коробках передач, самые передовые технологии работают для повышени эффективности и увеличения комфорта владельцев автомобилей(ЭБУ АКПП И Двигателя тесно связаны между собой. Работа Коробки Передач, теперь напрамую зависит не только от оборотов двигателя, но и от сигналов полученных от педали газа или тормоза, датчиков температуры масла АКПП или охлаждающей жидкости ДВС, сигналов системы ABS. Электронные компоненты играют всё более важную роль в работе Автоматический Коробки Передач. Это позволяет максимально снизить расход топлива и выполнять переключения передач менее заметными для водителя, а при необходимости ускорения — перейти на необходимую передачу намного быстрее, чем на полностью гидравлических коробках. Но и здесь есть свои минусы: увеличение электронных компонентов влечет и большие затраты при ремонте АКПП — к примеру на современных автомобилях некоторых производителей очень часто выходит из строя электронная плата управления АКПП, замена или ремонт которой естественно увеличивает затраты на ремонт АКПП.
КПП робот что это? Если сказать просто, то на механическую коробку передач поставили блок управления, который состоит из гидропривода и сервопривода (электронный узел). Вот этот блок, без вмешательства человека, заведуют сцеплением и переключением передач.
Принцип работы робота как у механики, только всё происходит автоматически — гидравлика с электронным управлением всё сделает сама. К роботам можно так-же отнести и современные коробки с сухим или мокрым сцеплением — (DSG у VAG группы, PowerShift у Ford, Speedshift DCT от Mercedes-Benz и многие другие)
Вариаторная коробка передач или Вариатор(CVT). Этот тип трансмисии стал широко популярен среди всех крупных автомобильных концернов как Азиатских так и Европейских. Работа Вариаторной(CVT) трансмиссии принципиально отличается от работы Автоматической или Роботизированной коробки переключения передач. В ней используется ременная(ремень состоит из секторов закрепленных специальной лентой, выполненный из металла) или цепная передача. Ремень или цепь работает между ведущим и ведомым шкивом, а изменение передаточного отношения происходит за счет увеличения или уменьшения радиуса по которому работает цепь или ремень — это можно сравнить с работой шестеренок на спортивном велосипеде: когда вы выбираете переднюю(которая непосредственно установлена на валу с педалями) шестеренку меньшего диаметра, а задняя шестерня(которая на заднем колесе велосипеда) выбрана большего диаметра, то для движения по дороге нужно большее количество оборотов передней шестеренки, но при этом усилие для вращения нужно совсем небольшое(это сравнимо с 1й передачаей на автоматической или механической коробке), и постепенно разгоняясь, можно изменять передаточное отношение меняя переднюю шестерню на больший диаметр, а заднюю на меньший — так увеличится скорость и при этом уменьшатся обороты для поддержания этой скорости.В вариаторах это произходит очень плавно, поэтому эту коробку называют безступенчатой. В вариаторных трансмиссиях присутвует и гидротрансформатор, который выполняет функцию как и в АКПП передачи крутящего момента от двигателя к трансмиссии. Но есть и исключения — в некоторых случаях вариатор устанавливается и без гидротрансформатора(в таких случаях передача крутящего момента происходит за счет шлицевого соединения — вал из вариатора вставляется в шлицы на маховике ДВС). По последним тенденциям производители Вариаторов вообще хотят отказаться от использования гидротрансформаторов, это позволит снизить потери мощьности и увеличить топливную экономичность!
Плюсы и минусы автомата, робота и вариатора
Чтобы лучше понять, чем отличается автоматическая коробка передач от роботизированной, давайте рассмотрим их эксплуатационные характеристики.
1. АКПП значительно снизила нагрузку на водителя при управлении автомобилем, особенно это заметно при движении в городских условиях. Современные автоматические коробки передач (адаптивные) способны даже подстраиваться под каждого водителя, под его стиль езды. Также, автомату свойственно мягкое и незаметное переключение скоростей.
Есть у автоматической коробки передач и минусы — это повышенный расход топлива, особенно в городе, увеличение времени разгона(отбор некоторого количества мощности ДВС для работы АКПП).
2. Робот относится к механике, значит обслуживание и ремонт будет дешевле, чем у автомата. Но это только на коробках с обычным приводом сцепления и переключением передач, а таких автомобилей всё меньше — их вытесняют с рынка современные и более эффективные двух дисковые роботы с сухим или мокрым сцеплением, а ремонт таких коробок на порядок дороже чем АКПП или Вариатора. Расход топлива у автомобиля с коробкой роботом(как классическим так и современным) приравнивается к МКПП, а в условиях города даже ниже, что не может не радовать.
Роботы передают крутящий момент от мотора к колёсам автомобиля без существенных потерь, чего не скажешь об автомате. Большой плюс роботизированной коробки в том, что она поддерживает ручное переключение скоростей, чего нет у многих автоматов.А современные роботизированные коробки имеют самые лучшие показатели по скорости переключения передач.
Роботы и автоматы. Сходства и различия.

В статье Роботы и их предшественники мы «побывали» в чудесном домике великого писателя Карела Чапека — создателя слова «робот», «послушали» пражскую легенду о таинственном Големе и даже «сыграли в шахматы» в Шёнбруннском дворце со знаменитым автоматом «Турок».
Но ведь цель наших изысканий — познакомиться с настоящими роботами, а до сих пор мы встречались лишь с их подобием — обыкновенными механическими игрушками, по-научному называемыми автоматами. Если все до этого встреченные нами создания человеческой мысли были всего лишь автоматами, то что это за существа такие — роботы и в чём их принципиальное отличие от всех остальных устройств? Попробуем разобраться с этой далеко не лёгкой проблемой. Ответы практически на все вопросы лежат в прошлом. И поэтому приоткроем дверь времени и перенесёмся в Париж 1738 года.
Прогуливаясь по одной из великих столиц мира, поражаясь роскошью дворцов вельмож и нищетой обычных горожан, мы наверняка наткнёмся на любопытный плакат, приглашающий всех, конечно не бесплатно, а за целых три ливра, посетить «Отель де Лонгвиль», чтобы познакомиться с удивительными механизмами Жака де Вокансона. Порывшись в карманах, мы находим как раз нужные нам три ливра и спешим в названное место. В роскошном зале отеля мы видим три величественных механизма. Первые два — «Игрок на тамбурине» и «Игрок на флейте» — наигрывают причудливые мелодии, по-настоящему двигая металлическими руками и извлекая звуки из своих музыкальных инструментов. Но ещё больше поражает нас именно третий автомат. Он стоит на высоком постаменте. Бронза, покрывающая его тело, причудливо переливается на солнце, а само волшебное создание непринуждённо машет крыльями и крякает.
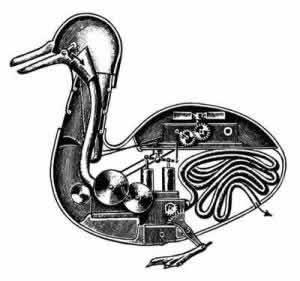
Возможно, внутреннее устройство утки. Иллюстрация Жака де Вокансона
Да, это была самая настоящая механическая утка. Великое изобретение не менее великого Жака де Вокансона — «Прометея нашего времени», как говорил о нём Вольтер. Утка была покрыта бронзой, умела махать крыльями, крякать и пить воду. Но самой удивительной способностью этой птицы было умение клевать зерно. Если вы брали в руки горстку, скажем, пшена, то утка склёвывала его с вашей руки, переваривала и выдавала наружу в виде экскрементов. К сожалению, никто и никогда не узнает, действительно ли автомат «переваривал» пищу, например в каком-нибудь чане с кислотой, или внутри было всего лишь два контейнера, в один из которых зерно складывалось, а из второго высыпалась заранее подготовленная «переваренная» пища. Механическая птица была утеряна навсегда.
И всё же, несмотря на всю гениальность механизма, эта утка не являлась роботом, а была самым обыкновенным автоматом.
Представим теперь точно такую же робоутку, которая могла бы клевать зерно, махать крыльями и крякать.
Прежде всего, определим, что же общего у робоптицы с механическим аналогом. Тут всё просто — обе клюют зерно, крякают и машут крыльями. А это значит, что главное отличие автоматов и роботов от всех других устройств заключается в том, что их целью является воздействие на окружающий мир. И те и другие воздействуют на окружающий мир напрямую: перемещаясь в нём, перенося предметы с места на место, да в конце концов просто поедая пшено. Другие устройства, например компьютер, радио и телевизор, могут влиять на окружающий мир только косвенно.
Теперь, когда мы нашли главное сходство роботов и автоматов, попробуем найти отличия между ними. Главных отличий у них два. Обратимся сначала к первому.
Предположим, что мы хотим научить нашу механическую утку не клевать зерно, а плеваться им. Чтобы это сделать, мы вооружаемся робототехническим скальпелем (обыкновенной отвёрткой), разделываем утку, полностью её перекраиваем: меняем местами шестерёнки, добавляем новые передачи, убираем старые. Через пару месяцев увлечённой работы мы имеем птицу, которая умеет плеваться.
А вот с робоуткой всё гораздо проще — достаточно её перепрограммировать. Если в первом случае нам потребуются месяцы, то во втором мы обойдёмся несколькими днями, а возможно, и часами. Следовательно, роботы отличаются от автоматов тем, что алгоритм их работы можно изменять. Алгоритм работы автомата неизменен. Фактически выпотрошив старую утку, добавив в неё новые передачи, мы создали совершенно другое устройство.
Теперь давайте уточним: механизм Жака де Вокансона совершал хватательные движения клювом всё время, не переставая, а пшено попадало в пищеварительный тракт, только если удавалось подсунуть его автомату буквально под нос. Робоутка же могла бы сама искать зерно. У нашей птицы были бы специальные «органы чувств» — датчики. Она бы определяла, ну скажем, с помощью обыкновенного датчика расстояния, что к её рту поднесли руку, и только тогда, предполагая, что ей принесли еду, начинала бы открывать свой клюв.
Получается, что ещё одним отличием роботов от автоматов является наличие у роботов «органов чувств» — датчиков. Роботы не только воздействуют на окружающий мир — они получают из него информацию и пользуются ей.
Подводя итог, повторим ещё раз главные отличия и сходства роботов и автоматов.
Сходства: роботы и автоматы напрямую воздействуют на окружающий мир.
- алгоритм работы робота гибок и легко изменяем. Алгоритм работы автомата жёстко задан — его изменить нельзя;
- робот в отличие от автомата получает данные из окружающего мира, обрабатывает их и, используя полученную информацию, принимает те или иные решения.
Наконец пришло время окунуться в мир настоящих роботов, а не каких-то абстрактных робоуток и понять на конкретном примере, чем же всё-таки они отличаются от своих механических товарищей. В 1938 году талантливый инженер Джозеф Барнет, работник компании «Вестингауз Электрик», представил великосветской публике своё изобретение. Перед сотнями восхищённых глаз предстал робот по имени Электро (Elektro). Он был настоящим исполином — ростом 210 см и весом 120 кг! Сделан робот был из алюминия на стальной раме.

Робот Электро дирижирует
Но что же этот искусственный человек умел делать? Электро мог ходить, двигать пальцами, головой и руками. Он умел даже разговаривать, открывая и закрывая рот, и в отличие от Эллочки-людоедки («Двенадцать стульев», И. Ильф и Е. Петров) знал не 30, а целых 70 слов! Целые фразы и выражения были записаны на нескольких пластинках, воспроизводимых в нужные моменты времени. Но одним из самых популярных трюков робота, вызывающих неописуемый восторг публики, была его способность. курить. Внутри корпуса были спрятаны меха, с помощью которых Электро мог выкурить не один десяток сигарет. О чём говорит всё вышесказанное? Только о том, что Электро, как истинный представитель роботов, воздействовал на окружающий мир!
У Электро были и «органы чувств» — датчики. Он мог слышать! В него был встроен микрофон, через который оператор давал команды роботу: что и когда ему делать. Команды подавались голосом. Причём важны были не сами слова, сказанные в микрофон, а только лишь количество этих слов и наличие пауз между ними. Робот умел видеть! У него было два глаза — фотоэлемента. Если в глаза светили лучом зелёного цвета, Электро говорил: «Вижу зелёный свет», если красным, то говорил: «Вижу красный свет». Другие цвета величественный исполин определять не мог, но ведь и это для 1938 года было великим достижением.
Было у Электро и одно сходство с автоматами — алгоритм его работы изменить было довольно сложно. Весь его мозг и все его внутренности состояли из реле (электронных переключателей), и, чтобы научить его чему-нибудь новому, необходимо было добавлять или убирать определённое количество реле. Конечно, перепрограммировать его было не так просто, как современных роботов, но и не так сложно, как если бы Электро был обыкновенным автоматом.
Нельзя обойти стороной судьбу этого гениального изобретения. Представленный в 1938 году он сразу же и надолго полюбился обычным людям. Электро ездил с гастролями по США, работал в луна-парке и даже снялся в одном весьма нецеломудренном фильме, где сыграл робота по имени Thinko. К сожалению, с наступлением века компьютеров интерес к этому чуду электромеханики начал таять, пока не растаял окончательно. Робот был разобран на запчасти и сложен в коробки. Но на этом история робота, к счастью, не заканчивается. В 2006 году инженер по имени Джек Уикс, выкупив часть запчастей, восстановил робота, и теперь его, правда безжизненного и не умеющего ничего делать, вы можете встретить в музее Генри Форда в штате Мичиган.
Теперь, узнав отличия роботов от автоматов, мы можем подробнее познакомиться с тем, какие роботы бывают и чем они отличаются друг от друга. Это мы обсудим в статье Роботы — они такие разные!
Аспирант физического факультета ЮФУ, инженер АСУ ТП
А. В. Донченко
- //roborobka.ru/elektro/
- //roborobka.ru/vaucanson/
Чем робот отличается от автомата
В этой небольшой статье поговорим об одном очень интересном вопросе: чем робот отличается от автомата? Многие люди думают, что это одно и то же, но на самом деле это не так. Давайте разберемся в разнице между этими понятиями.
Автомат (автоматическое устройство) — это машина, которая работает по заранее заданному алгоритму (программе) без непосредственного участия человека и выполняет определенную последовательность действий (функции получения, преобразования, передачи и использования материалов, энергии и информации). Примеры: станки-автоматы с числовым программным управлением, торговые автоматы, контролеры-автоматы в метрополитенах.
Автоматические устройства могут быть простыми или сложными, но в большинстве своем они не способны адаптироваться к изменяющимся условиям.
Робот — это особый вид автоматического устройства, которое имеет способность воспринимать свою среду с помощью датчиков, обрабатывать информацию с помощью компьютера и действовать в соответствии с программой или искусственным интеллектом. Роботы могут быть перепрограммированы для выполнения различных задач, а также обучаться и улучшаться на основе своего опыта.

Автоматы появились раньше, чем роботы. Первый известный пример искусственного автомата был создан в Древней Греции Архитой из Тарента в 4 веке до н.э. Это была деревянная голубка, которая могла летать с помощью парового двигателя. С тех пор концепция автоматов развивалась, и появились различные механические чудеса, имитирующие животных, людей и музыкантов.
Роботы начали создаваться в середине 20 века. В 1961 году был создан первый промышленный робот, который назывался Юнимейт. Это была машина, способная выполнять производственные задачи, которые позволяли упростить человеческий труд. С 2000-х годов были построены цифровые программные промышленные роботы с искусственным интеллектом, способные выполнять сложные задачи и взаимодействовать с людьми
В контексте управления автоматы работают по набору фиксированных инструкций и имеют ограниченную функциональность. Роботы спроектированы так, чтобы реагировать на окружающую их среду и принимать решения на основе программирования и входных данных с датчиков.
Сложность роботов может варьироваться от простых машин, способных выполнять повторяющиеся задачи, до сложных систем искусственного интеллекта, способных обучаться и адаптироваться. Автоматы меньше связаны с вычислениями, а больше с автоматизацией различных задач.
Автомат чаще всего работает по принципу «включил-выключил» и не может обучаться или модифицировать свою программу. Они используются для упрощения и автоматизации некоторых процессов, например, в бытовой технике, банкоматах, телефонных аппаратах и т.д.

Основное отличие между роботом и автоматическим устройством заключается в степени гибкости, интеллекта и самостоятельности. Автоматическое устройство может работать только в пределах своего заранее заданного алгоритма и не может реагировать на непредвиденные ситуации. Робот может анализировать данные с датчиков, применять логику и алгоритмы, а также модифицировать свое поведение в зависимости от цели и обстоятельств.
Например, автоматическая стиральная машина может запускать цикл стирки по нажатию кнопки, но не может определить, какой режим стирки лучше подходит для конкретной ткани или загрязнения. Робот-пылесос может самостоятельно перемещаться по комнате, избегая препятствий, определять уровень загрязнения пола и выбирать оптимальный режим уборки.

Примеры автоматических устройств в промышленности и сельском хозяйстве:
- Автоматическая линия по производству печенья, которая состоит из нескольких узлов: тестомесильной машины, формовочной машины, печи, охлаждающего конвейера и упаковочной машины. Каждый узел работает под управлением специальной программы, которая задает параметры процесса, такие как скорость, температура, время и т.д. Таким образом, линия может производить разные виды печенья с разными начинками, формами и рисунками.
- Автоматическая сварочная машина, которая используется для соединения металлических деталей разной формы и размера. Машина имеет роботизированную руку с электродом, которая может перемещаться в трех измерениях и вращаться вокруг своей оси. Машина получает данные о деталях из сканера или чертежа и самостоятельно выбирает оптимальный режим сварки, такой как ток, напряжение, скорость и т.д.
- Автоматическая система управления теплицей, которая обеспечивает оптимальные условия для роста и развития растений. Система состоит из датчиков, измеряющих температуру, влажность, освещение, уровень CO2 и другие параметры внутри теплицы, а также из исполнительных устройств, которые регулируют подачу воды, вентиляцию, отопление, освещение и другие факторы. Система работает под управлением компьютера, который анализирует данные от датчиков и выдает команды исполнительным устройствам в соответствии с заданными алгоритмами.
Итак, мы можем сделать вывод, что робот отличается от автомата тем, что он имеет большую степень самостоятельности, гибкости и интеллекта. Робот может реагировать на разные ситуации и самосовершенствоваться, в то время как автомат выполняет набор одних и тех же действий без изменений. Роботы и автоматы имеют свои преимущества и недостатки, и выбор между ними зависит от целей и задач, которые нужно решить.
На современных промышленных предприятиях роботы и автоматы совместно выполняют различные задачи, связанные с производством, обслуживанием, контролем и транспортировкой продукции. Взаимодействие может быть как прямым, когда роботы и автоматы физически контактируют друг с другом, так и косвенным, когда они обмениваются информацией и сигналами через сети связи.
Например, при производстве автомобилей роботы и автоматы работают в тесном взаимодействии. Роботы выполняют различные операции, такие как сварка, окраска, сборка, контроль качества и т.д. Автоматы обеспечивает подачу деталей, транспортировку изделий, синхронизацию работы роботов и мониторинг процесса. Такая интеграция позволяет повысить производительность, гибкость и надежность производства, а также сократить расходы на персонал и обслуживание.

Автоматизация — это процесс внедрения технологий, позволяющих осуществлять производственные процессы без участия человека. Робототехника — это наука и технология конструирования, проектирования и создания роботов — автоматизированных технических систем, способных выполнять различные функции, часто с помощью датчиков и искусственного интеллекта.
Робототехника является важной частью автоматизации, так как роботы могут заменить или дополнить человеческий труд, повысить эффективность и качество производства, снизить затраты и риски, расширить возможности производства и создать новые продукты и услуги.
Присоединяйтесь к нашему каналу в Telegram «Промышленные роботы» и будьте в центре инноваций и передовых технологий в мире автоматизации производства! Подписывайтесь сейчас, чтобы не пропустить эксклюзивный контент: Промышленные робототы в Telegram
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Чем отличается робот от автомата
В сегодняшних условиях автомобиль является таким же необходимым персональным устройством, как телефон, компьютер или фотоаппарат. Однако многие автолюбители при выборе нового железного коня путаются в терминологии и технических особенностях предлагаемых моделей. Например, в чем разница между «роботом» и «автоматом»?
Автоматическая коробка передач состоит из гидротрансформатора и редуктора. Первый заменяет собой сцепление, последний состоит из зацепленных пар шестерен. Данный принцип позволяет «автомату» переключать скорости самостоятельно, без участия водителя. В данном механизме электроника практически полностью отсутствует.
Роботизированная коробка передач близка к механической, с той лишь разницей, что здесь имеется электронный блок управления из гидро- или сервоприводов, работающий по определенным алгоритмам. Именно он управляет механизмом переключения скоростей и фрикционной системой сцепления. Водитель также может не смешиваться в процесс.

«Автомат» существенно упрощает процесс вождения. Особенно это актуально для начинающих водителей или тех, кому приходится долгое время проводить в дорожных пробках. Транспортные средства с автоматической коробкой передач отличаются плавным и мягким ходом с незаметным переключением скоростей. Ключевым недостатком «автомата» считается высокий расход топлива, в частности в городских условиях, и сравнительно дорогостоящий ремонт.
«Робот» может передать крутящий момент двигателя к приводам колес автомобиля без значительных потерь. Таким образом, его основным достоинством считается высокая эффективность. К тому же, ремонт и обслуживание роботизированной коробки передач мало чем отличается от МКПП. Многие владельцы справляются с небольшими поломками самостоятельно. В городских условиях расход топлива аналогичен показателям механики, а иногда даже ниже. Некоторые автовладельцы заявляют об экономии до 30%. Потребление масла также более экономичное, чем у «автомата» и МКПП.
«Автомат» полностью исключает ручное переключение скоростей, в «роботе» предусматривается такая возможность. Однако в работе последнего часто случаются рывки и толчки. Многие водители придерживаются мнения, что роботизированная коробка передачи – это очень нестабильная трансмиссия. Долгое время срабатывания негативно сказывается на динамике автомобиля.

Водители транспортных средств с «роботом» при одной включённой передаче могут выбрать другую и, если необходимо, включить её без каких-либо перерывов. Подобные системы называют переселективными коробками. На сегодняшний день «автоматы» на такое не способны.
Еще одним важным отличием «робота» является малый вес и компактный размер. Данные характеристики чрезвычайно важны при выпуске малолитражных автомобилей. Несмотря на небольшие размеры, «роботы» славятся надежностью конструкции. По этому параметру РКПП значительно превосходит и вариатор, и «автомат». Следует помнить, что знак P на селекторе автомобиля обозначает «автомат», N и R– «робот».
Выводы:
- «Автомат» не имеет общих черт с МКПП, в то время как устройство «робота» во многом напоминает механику.
- «Автомат» характеризуется мягким и плавным переключением скоростей. «Роботы» срабатывают медленнее, с рывками и толчками.
- «Робот» предусматривает возможность ручного переключения, «автомат» — нет.
- Расход топлива и масла в «автоматах» гораздо выше, чем в «роботах».
- Ремонт и обслуживание «робота» дешевле и проще, чем «автомата».
- «Роботы» компактнее и легче по весу.
- «Роботы» — наиболее надежный тип КПП.
- «Автомат» обозначается буквой Р, «робот» — N и R.
Комментарии
Uncle Bob 12.10.2018 14:25
В статье многое упрощено и упущено. Более того, выводы 3 и 7 в корне не верны. А если учитывать современные роботизированные коробки VW Group, известные под торговым названием DSG, то не верны почти все пункты. Коротко, коробки передач делятся на: 1. Ручные = сцепление шестеренчатый редуктор. Простые, легкие, но требуют ручного управления. Расход топлива, масла и долговечность зависят от водителя. 2. Полуавтоматические = сцепление шестеренчатый редуктор сервоприводы. Отсутствует педаль сцепления, но в остальном как ручная КПП. Мало применяются, пример: Maserati/Ferrari DuoSelect. 3. Роботы = сцепление шестеренчатый редуктор сервоприводы искусственный интеллект. В случае DSG сцепления 2, система сложная и тяжелая. С другой стороны, переключения очень быстрые (на порядок быстрее чем у других \»роботов\» и \»автоматов\»). Возможен как полуавтоматический так автоматический режим работы. Все \»роботы\» быстро умирают от езды в пробках. 4. Автоматы = гидротрансформатор шестеренчатый редуктор сервоприводы искусственный интеллект. Система сложная и тяжелая. С другой стороны, переключения плавные, в связи с чем и двигатель и КПП долговечны. Возможен как полуавтоматический так автоматический режим работы. На дорогих \»автоматах\» может быть большее количество передач (8-10), так что потребление топлива ниже чем у остальных видов КПП. 5. Вариаторы. Подвид \»автоматов\», но конструктивно сильно отличается. Гладко выставляет соотношение без видимого переключения. Возможен как полуавтоматический так автоматический режим работы. Легкие низкий расход топлива. Недолговечны.