Как называется система работающая без участия человека
Вводная часть. Термины, понятия
Автомат – от греческого „Automatos“ – самодействующий.
Автоматика – раздел науки и техники занимающийся изучением , исследованием, разработкой и использованием автоматически действующих устройств и систем.
Автоматическое устройство – совокупность механических, электрических, пневматических, гидравлических или комбинированных ( электромеханических, пневмоэлектрических и др) устройств, которые функционируют самостоятельно без постоянного участия человека.
Система автоматики – совокупность автоматических устройств и управляемых механизмов или объектов действующих автоматически
Управление – совокупность действий направленных на осуществление одного или нескольких процессов. Если управление осуществляется без непосредственного участия человека, то такое управление называется автоматическим управлением.
Система автоматического управления (САУ) – совокупность устройств автоматики и объектов управления осуществляющая автоматическое управление объектом или процессом для достижения поставленных целей. Такая система функционирует без непосредственного участия человека. За человеком остаются функции наблюдения, контроля, обслуживания.
Объект управления – механизм, агрегат, или технологический процесс, целенаправленное функционирование которого должно быть обеспечено. Объектом управления могут быть предприятия, с / х фермы, коллективы людей и т.д.
Процесс – последовательная смена состояний какого-либо объекта или системы, в ходе которой происходит изменение перемещение или запас материалов, энергии и информации.
Автоматизация – замена участия человека в управлении объектом или процессом автоматическими устройствами.
Автоматизированная система управления – совокупность технических и информационных средств, обеспечивающих управление объектом или процессом для достижения поставленных целей. Часть функций может быть возложена на человека.
Автоматическое регулирование – поддерживание на постоянном уровне или изменение по заданному закону отдельных регулируемых параметров (температура, давление, расход и т.д.) в объекте управления. Система автоматического регулирования (САР) является подсистемой систем автоматического управления.
Подразделения систем автоматики:
1.Промышленная автоматика – занимается автоматизацией различных производственных и технологических процессов в таких областях как:
- Электро-,тепло- и газоэнергетика
- Производство аппаратуры и оборудования
- Химия и нефтехимия
- Автомобилестроение
- Производство продуктов питания
- Деревообработка, мебельная промышленность
- Производство военной техники
- Производство строительных материалов, строительство
- Сельскохозяйственное производство
- Складское хозяйство и т. д.
2.Автоматика зданий – занимается автоматизацией систем обеспечения условий труда и жизнеобеспечения человека в промышленных и жилых зданиях, которые обеспечивают оптимальные условия для работы и жизни человека. Это системы тепло-водо-электро-газоснабжения, климатические системы, системы освещения, охраны, сигнализации, пожаробезопасности, инфосети и др.
3.Специализированная автоматика – занимается автоматизаций специализированных систем работающих в атомной и радиационной промышленности, космосе, медицине, биологии, диагностике и др.
Некоторые функции систем автоматики:
- Автоматический контроль . Сюда относят системы автоматических измерений, сортировки, сигнализации, сбора и сохранения информации.
- Автоматическия защита . Системы обеспечивают защиту оборудования от неправильного функционирования, обеспечивая безопасные условия труда и жизнеобеспечения человека.
- Автоматическое управление . Сюда относят системы автоматического запуска, остановки, реверсирования устройств, управления различными параметрами (температура, уровень, давление и т.д.) по заданной программе, оптимизации работы оборудования и протекания процесса и др.
- Дистанционное управление . Системы для управления распределёнными в пространстве объектами и при необходимости согласование и оптимизация их работы.
- Информационные системы . Системы для сбора, обработки, хранения и передачи информации о протекании процессов и выводы рекомендаций и советов по результатам анализа информации.
Гибкие и роботизированные системы . Состоят из быстро изменяемых, перемещаемых, переналаживаемых, перепрограммируемых модулей, обеспечивающих быстрое изменение операций технологического процесса и выпуска новой продукции. Такие модули содержат роботы, автоматические станки с перепрограммируемым управлением, автоматические линии, универсальные управляющие устройства (компьютеры, контроллеры), сетевые инфоустройства, позволяющие обеспечить согласованное взаимодействие автоматически действующих устройств.
В системах автоматики для питания устройств используется электро -, пневмо -, гидроэнергия и соответственно используются электрические, пневматические, гидравлические и комбинированные автоматические устройства. Для управления ими широко используются микропроцессорная и вычислительная техника.
Мехатроника — раздел автоматики, занимающийся вопросами управления электро-, пневмо-, гидромеханическими устройствами (станки, роботы, автоматические линии и т.д.) с помощью микропроцессорной и вычислительной техники.
Технотроника – раздел автоматики, занимающийся вопросами управления техническими, технологическими процессами с помощью микропроцессорной и вычислительной техники.
Energy
education

Система управления — строго определённый набор средств сбора сведений о подконтрольном объекте и средств воздействия на его поведение, предназначенный для достижения определённых целей. Объектом системы управления могут быть как технические объекты, так и люди.
1. Структурная схема системы управления
В задачах управления всегда есть два объекта – управляемый и управляющий. Управляемый объект обычно называют объектом управления или просто объектом, а управляющий объект – регулятором. Например, при управлении частотой вращения объект управления – это двигатель (электромотор, турбина); в задаче стабилизации курса корабля – корабль, погруженный в воду; в задаче поддержания уровня громкости – динамик.
Регуляторы могут быть построены на разных принципах. Самый знаменитый из первых механических регуляторов – центробежный регулятор Уатта для стабилизации частоты вращения паровой турбины (на рисунке). Когда частота вращения увеличивается, шарики расходятся из-за увеличения центробежной силы. При этом через систему рычагов немного закрывается заслонка, уменьшая поток пара на турбину.

Регулятор температуры в холодильнике или термостате – это электронная схема, которая включает режим охлаждения (или нагрева), если температура становится выше (или ниже) заданной.
Во многих современных системах регуляторы – это микропроцессорные устройства, компьютеры. Они успешно управляют самолетами и космическими кораблями без участия человека. Современный автомобиль буквально «напичкан» управляющей электроникой, вплоть до бортовых компьютеров.
Обычно регулятор действует на объект управления не прямо, а через исполнительные механизмы (приводы), которые могут усиливать и преобразовывать сигнал управления, например, электрический сигнал может «превращаться» в перемещение клапана, регулирующего расход топлива, или в поворот руля на некоторый угол.
Чтобы регулятор мог «видеть», что фактически происходит с объектом, нужны датчики.
С помощью датчиков чаще всего измеряются те характеристики объекта, которыми нужно управлять. Кроме того, качество управления можно улучшить, если получать дополнительную информацию – измерять внутренние свойства объекта.
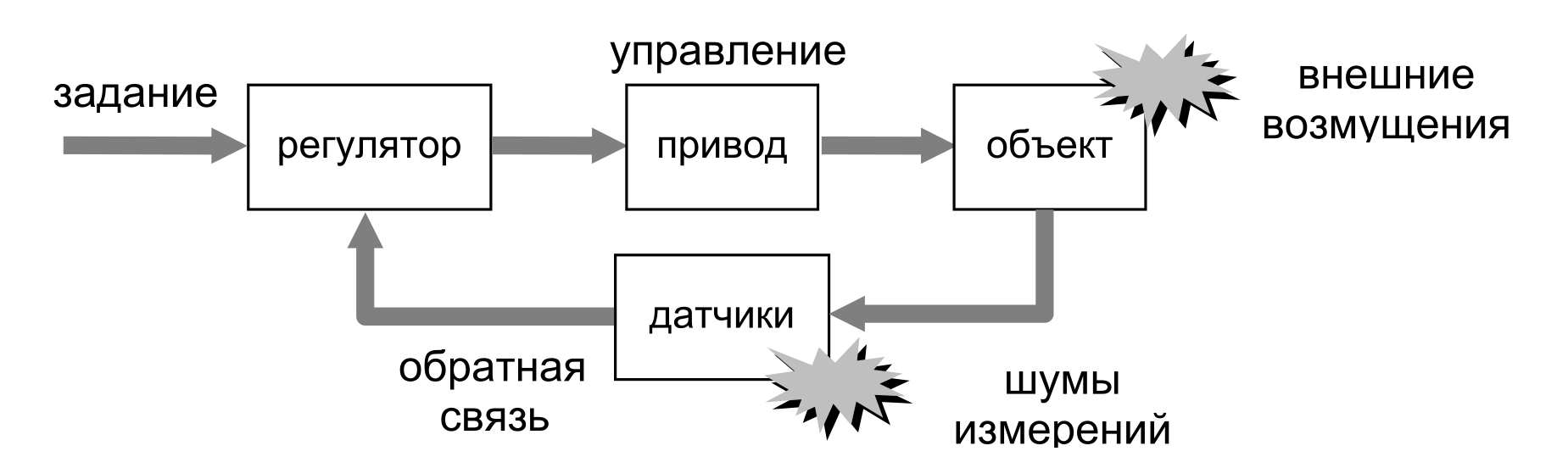
Итак, в типичную систему управления входят объект, регулятор, привод и датчики. Однако, набор этих элементов – еще не система. Для превращения в систему нужны каналы связи, через них идет обмен информацией между элементами. Для передачи информации могут использоваться электрический ток, воздух (пневматические системы), жидкость (гидравлические системы), компьютерные сети.
Взаимосвязанные элементы – это уже система, которая обладает особыми свойствами, которых нет у отдельных элементов и любой их комбинации.
Основная интрига управления связана с тем, что на объект действует окружающая среда – внешние возмущения, которые «мешают» регулятору выполнять поставленную задачу. Большинство возмущений заранее непредсказуемы, то есть носят случайный характер.
Кроме того, датчики измеряют параметры не точно, а с некоторой ошибкой, пусть и малой. В этом случае говорят о «шумах измерений» по аналогии с шумами в радиотехнике, которые искажают сигналы. Подводя итого, можно нарисовать структурную схему системы управления так:
Например, в системе управления курсом корабля
- объект управления – это сам корабль, находящийся в воде; для управления его курсом используется руль, изменяющий направление потока воды;
- регулятор – цифровая вычислительная машина;
- привод – рулевое устройство, которое усиливает управляющий электрический сигнал и преобразует его в поворот руля;
- датчики – измерительная система, определяющая фактический курс;
- внешние возмущения – это морское волнение и ветер, отклоняющие корабль от заданного курса;
- шумы измерений – это ошибки датчиков.
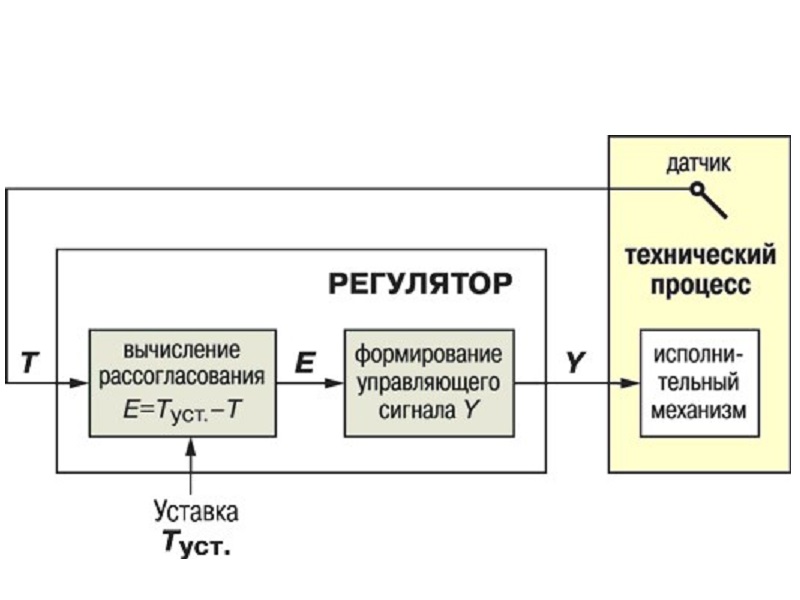
Информация в системе управления как бы «ходит по кругу»: регулятор выдает сигнал управления на привод, который воздействует непосредственно на объект; затем информация об объекте через датчики возвращается обратно к регулятору и все начинается заново. Говорят, что в системе есть обратная связь, то есть регулятор использует информацию о состоянии объекта для выработки управления. Системы с обратной связью называют замкнутыми, поскольку информация передается по замкнутому контуру.
Регулятор сравнивает задающий сигнал («задание», «уставку», «желаемое значение») с сигналами обратной связи от датчиков и определяет рассогласование (ошибку управления) – разницу между заданным и фактическим состоянием. Если оно равно нулю, никакого управления не требуется. Если разница есть, регулятор выдает управляющий сигнал, который стремится свести рассогласование к нулю. Поэтому схему регулятора во многих случаях можно нарисовать так:
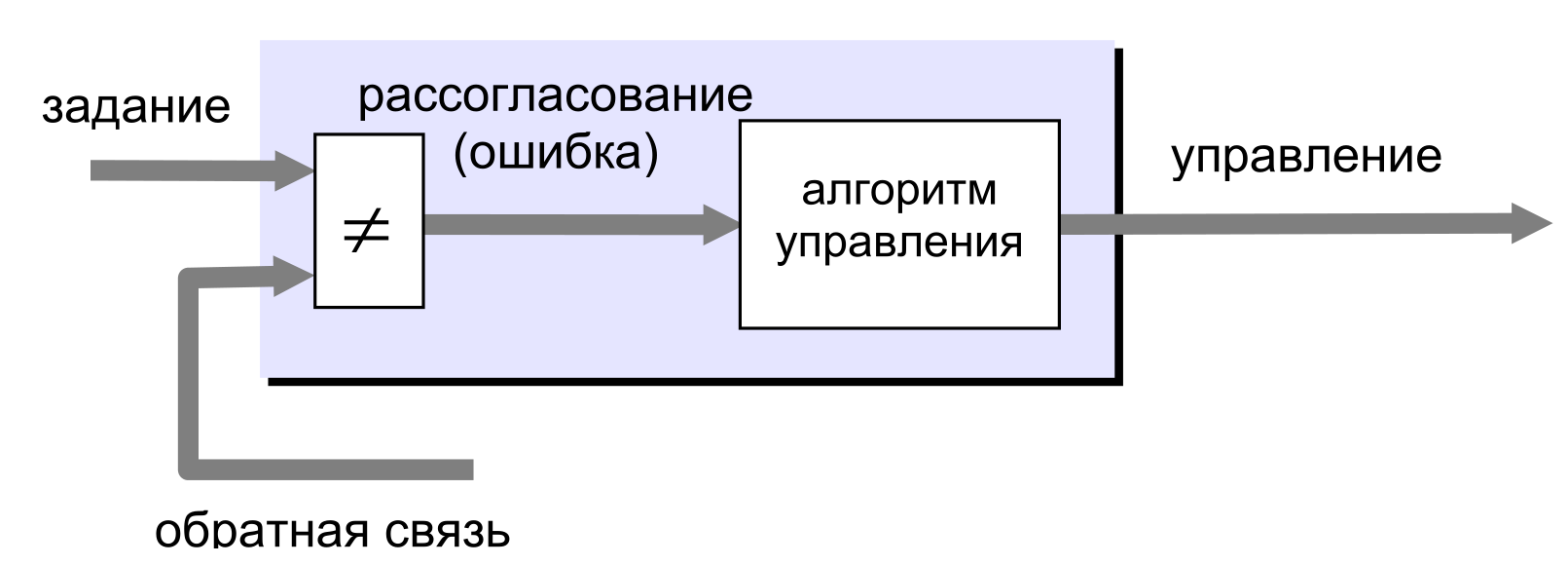
Такая схема показывает управление по ошибке (или по отклонению). Это значит, что для того, чтобы регулятор начал действовать, нужно, чтобы управляемая величина отклонилась от заданного значения. Блок, обозначенный знаком ≠ , находит рассогласование. В простейшем случае в нем из заданного значения вычитается сигнал обратной связи (измеренное значение).
Можно ли управлять объектом так, чтобы не было ошибки? В реальных системах – нет.
Прежде всего, из-за внешних воздействий и шумов, которые заранее неизвестны. Кроме того, объекты управления обладают инерционностью, то есть, не могут мгновенно перейти из одного состояния в другое. Возможности регулятора и приводов (то есть мощность сигнала управления) всегда ограничены, поэтому быстродействие системы управления (скорость перехода на новый режим) также ограничена. Например, при управлении кораблем угол перекладки руля обычно не превышает 30 −35°, это ограничивает скорость изменения курса.
Мы рассмотрели вариант, когда обратная связь используется для того, чтобы уменьшить разницу между заданным и фактическим состоянием объекта управления. Такая обратная связь называется отрицательной, потому что сигнал обратной связи вычитается из задающего сигнала. Может ли быть наоборот? Оказывается, да. В этом случае обратная связь называется положительной, она увеличивает рассогласование, то есть, стремится «раскачать» систему. На практике положительная обратная связь применяется, например, в генераторах для поддержания незатухающих электрических колебаний.
Можно ли управлять, не используя обратную связь? В принципе, можно. В этом случае регулятор не получает никакой информации о реальном состоянии объекта, поэтому должно быть точно известно, как этот объект себя ведет. Только тогда можно заранее рассчитать, как им нужно управлять (построить нужную программу управления). Однако при этом нельзя гарантировать, что задание будет выполнено. Такие системы называют системами программного управления или разомкнутыми системами, поскольку информация передается не по замкнутому контуру, а только в одном направлении.

Слепой и глухой водитель тоже может вести машину. Некоторое время. Пока он помнит дорогу и сможет правильно рассчитать свое место. Пока на пути не встретятся пешеходы или другие машины, о которых он заранее не может знать. Из этого простого примера ясно, что без обратной связи (информации с датчиков) невозможно учесть влияние неизвестных факторов, неполноту наших знаний.
Несмотря на эти недостатки, разомкнутые системы часто применяются на практике, например в стиральных машинах. Однако с точки зрения теории управления разомкнутые системы малоинтересны.
Автоматическая система – это система, работающая без участия человека. Есть еще автоматизированные системы, в которых рутинные процессы (сбор и анализ информации) выполняет компьютер, но управляет всей системой человек-оператор, который и принимает решения. Мы будем далее изучать только автоматические системы.
Задачи систем управления. Автоматические системы управления применяются для решения трех типов задач:
- стабилизация, то есть поддержание заданного режима работы, который не меняется длительное время (задающий сигнал – постоянная, часто нуль);
- программное управление – управление по заранее известной программе (задающий сигнал меняется, но заранее известен);
- слежение за неизвестным задающим сигналом.
К системам стабилизации относятся, например, авторулевые на кораблях (поддержание заданного курса), системы регулирования частоты вращения турбин. Системы программного управления широко используются в бытовой технике. Следящие системы служат для усиления и преобразования сигналов, они применяются в приводах и при передаче команд через линии связи, например, через Интернет.
Одномерные и многомерные системы. По количеству входов и выходов бывают
- одномерные системы, у которых один вход и один выход (они рассматриваются в так называемой классической теории управления);
- многомерные системы, имеющие несколько входов и/или выходов (главный предмет изучения современной теории управления).
Мы будем изучать только одномерные системы, где и объект, и регулятор имеют один входной и один выходной сигнал. Например, при управлении кораблем по курсу можно считать, что есть одно управляющее воздействие (поворот руля) и одна регулируемая величина (курс).
Однако, в самом деле это не совсем верно. Дело в том, что при изменении курса меняется также крен и дифферент корабля. В одномерной модели мы пренебрегаем этими изменениями, хотя они могут быть очень существенными. Например, при резком повороте крен может достигнуть недопустимого значения. С другой стороны, для управления можно использовать не только руль, но и различные подруливающие устройства, стабилизаторы качки и т.п., то есть объект имеет несколько входов. Таким образом, реальная система управления курсом – многомерная.
Исследование многомерных систем – достаточно сложная задача. Поэтому в инженерных расчетах стараются иногда упрощенно представить многомерную систему как несколько одномерных, и довольно часто такой метод приводит к успеху.
Непрерывные и дискретные системы. По характеру сигналов системы могут быть
- непрерывными, в которых все сигналы – функции непрерывного времени, определенные на некотором интервале;
- дискретными, в которых используются дискретные сигналы (последовательности чисел), определенные только в отдельные моменты времени.
Непрерывные (или аналоговые) системы обычно описываются дифференциальными уравнениями. Это все системы управления движением, в которых нет компьютеров и других элементов дискретного действия (микропроцессоров, логических интегральных схем).
Микропроцессоры и компьютеры – это дискретные системы, поскольку в них вся информация хранится и обрабатывается в дискретной форме. Компьютер не может обрабатывать непрерывные сигналы, поскольку работает только с последовательностями чисел. Для их описания применяют разностные уравнения.
Существуют также и гибридные непрерывно-дискретные системы, например, компьютерные системы управления движущимися объектами (кораблями, самолетами, автомобилями и др.). В них часть элементов описывается дифференциальными уравнениями, а часть – разностными. С точки зрения математики это создает большие сложности для их исследования, поэтому во многих случаях непрерывно-дискретные системы сводят к упрощенным чисто непрерывным или чисто дискретным моделям.
Стационарные и нестационарные системы. Для управления очень важен вопрос о том, изменяются ли характеристики объекта со временем. Системы, в которых все параметры остаются постоянными, называются стационарными, что значит «не изменяющиеся во времени».
В практических задачах часто дело обстоит не так радужно. Например, летящая ракета расходует топливо и за счет этого ее масса изменяется. Таким образом, ракета – нестационарный объект. Системы, в которых параметры объекта или регулятора изменяются со временем, называются нестационарными. Хотя теория нестационарных систем существует (формулы написаны), применить ее на практике не так просто.
Определенность и случайность. Самый простой вариант – считать, что все параметры объекта определены (заданы) точно, так же, как и внешние воздействия. В этом случае мы говорим о детерминированных системах, которые рассматривались в классической теории управления.
Тем не менее, в реальных задачах точных данных у нас нет. Прежде всего, это относится к внешним воздействиям. Например, для исследования качки корабля на первом этапе можно считать, что волна имеет форму синуса известной амплитуды и частоты. Это детерминированная модель. Так ли это на практике? Естественно нет. С помощью такого подхода можно получить только приближенные, грубые результаты.
По современным представлениям форма волны приближенно описывается как сумма синусоид, которые имеют случайные, то есть неизвестные заранее, частоты, амплитуды и фазы.
Помехи, шум измерений – это тоже случайные сигналы.
Системы, в которых действуют случайные возмущения или параметры объекта могут изменяться случайным образом, называются стохастическими (вероятностными). Теория стохастических систем позволяет получать только вероятностные результаты. Например, нельзя гарантировать, что отклонение корабля от курса всегда будет составлять не более 2°, но можно попытаться обеспечить такое отклонение с некоторой вероятностью (вероятность 99% означает, что требование будет выполнено в 99 случаях из 100).
Оптимальные системы. Часто требования к системе можно сформулировать в виде задачи оптимизации. В оптимальных системах регулятор строится так, чтобы обеспечить минимум или максимум какого-то критерия качества. Нужно помнить, что выражение «оптимальная система» не означает, что она действительно идеальная. Все определяется принятым критерием – если он выбран удачно, система получится хорошая, если нет – то наоборот.
Особые классы систем. Если параметры объекта или возмущений известны неточно или могут изменяться со временем (в нестационарных системах), применяют адаптивные или самонастраивающиеся регуляторы, в которых закон управления меняется при изменении условий. В простейшем случае (когда есть несколько заранее известных режимов работы) происходит простое переключение между несколькими законами управления. Часто в адаптивных системах регулятор оценивает параметры объекта в реальном времени и соответственно изменяет закон управления по заданному правилу.
Самонастраивающаяся система, которая пытается настроить регулятор так, чтобы «найти» максимум или минимум какого-то критерия качества, называется экстремальной.
Администратор сайта: Колосов Михаил
email:
Copyright © 2011-2024. All rights reserved.
АСУ ТП — Автоматизированная система управления
Разработаем и внедрим автоматизированную систему управления технологическими процессами любой сложности. Позвоните нам +38 (044) 568 52 37 или пришлите запрос на почту.
Под АСУ ТП обычно понимают комплексное решение, позволяющее автоматизировать основные технологические операции на производстве в целом или в его части, дающей относительно готовый продукт. Термин «автоматизированный», в отличие от термина «автоматический», подчеркивает необходимость вмешательства человека в определенные операции — для поддержания контроля над процессом и решения проблем.
АСУ ТП (Автоматизированная система управления технологическим процессом) — комплекс программно-аппаратных средств, предназначенный для автоматизации управления технологическим оборудованием промышленных предприятий.
Компонентами АСУ ТП могут быть отдельные системы (АСУ) и автоматизированное оборудование, объединенные в единый комплекс. Зачастую, АСУ ТП, это единый центр управления технологическим процессом в виде одной или нескольких панелей, средства обработки и архивирования информации о процессе, типовые элементы автоматизации: датчики, устройства, приводы. Промышленные сети используются для обмена информацией между всеми подсистемами.
Автоматизация технологического процесса — это набор методов и инструментов, для реализации системы либо систем, позволяющих управлять технологическим процессом без непосредственного участия человека и без предоставления ему права принятия решений.
Классификация АСУ ТП
Как правило, все АСУ ТП делятся на три глобальных класса:
SCADA (диспетчерский контроль и сбор данных). Этот термин можно перевести как «система телемеханики» / «телеметрии» / «управления трансмиссией». Последнее определение наиболее точно отражает сущность и цель системы — контроль и мониторинг объектов диспетчером.
Термин SCADA часто используется в более узком смысле: многие называют его программным пакетом для визуализации процессов. Однако в данном разделе слово SCADA означает целый класс систем.
ПЛК — «программируемый логический контроллер»
ПЛК часто называют аппаратным модулем для реализации алгоритмов автоматического управления. Однако у термина ПЛК есть более общее значение и часто оно используется для обозначения всего класса системы.
DCS (распределенная система).
Данную классификацию некоторые эксперты считают весьма условной, т.к. в последние годы были внедрены гибридные системы. По ряду характеристик их можно отнести к нескольким классам.
Автоматизация — задачи
Основными целями являются:
- сокращение количества обслуживающего персонала;
- увеличение объема выпускаемой продукции;
- повышение эффективности производственного процесса;
- повышение качества продукции;
- снижение затрат на сырье;
- увеличение производственного ритма;
- повышение безопасности;
- повышение экологичности;
- повышение эффективности бизнеса.
Поставленные цели достигаются посредством выполнения следующих задач:
- повышение качества регулирования;
- повышение коэффициента готовности оборудования;
- повышение эргономики операторов;
- обеспечение достоверности информации о материальных компонентах, используемых в производстве;
- ведение информации о ходе техпроцесса и аварийных ситуациях.
Задачи решаются следующим образом:
- внедрение современных средств автоматизации.
Автоматизация в рамках единого производственного процесса позволяет заложить основу для внедрения систем управления производством и предприятием.
Автоматизация производственных процессов — основные виды
«Автоматизация процесса» означает набор методов и инструментов, предназначенных для реализации системы или систем, управляющих технологическим процессом самостоятельно, без прямого участия людей или путем предоставления человеку возможности принимать наиболее из ответственных решений. АСУ ТП создается в результате автоматизации техпроцессов. Автоматизация основана на перераспределении материальных, энергетических и информационных потоков по принятому критерию (оптимальность).
- Частичная автоматизация — автоматизация отдельных устройств, станков, операций. Делается тогда, когда управление процессами практически недоступно человеку в силу их сложности или быстротечности. Зачастую, рабочее оборудование частично автоматизировано. Локальная автоматизация широко применяется в пищевой промышленности.
- Комплексная автоматизация — обеспечивает автоматизацию технологического участка, цеха или предприятия в единый автоматизированный комплекс. Например, электростанции.
- Полная автоматизация — высшая ступень. Все функции при управлении производством (на уровне компании) передаются техническим средствам. Атомные энергетические компании можно назвать полностью автоматизированными.
Выделяют автоматизацию следующих технологических процессов:
- Автоматизация непрерывных процессов (автоматизация процессов);
- Автоматизация дискретных процессов (автоматизация производства);
- Гибридная автоматизация (Hybrid Automation).
Уровни автоматизации
Нулевой
Имеется в виду автоматизация определенных рабочих точек. Например, вращение шпинделя. В остальном ожидается участие людей. В этом случае, автоматизация называется механизацией.
Первый
На данном уровне автоматизация предполагает «автоматизацию рабочего процесса в непрерывном и серийном производстве». Здесь нет автоматической связи между сотрудником и оборудованием — рабочий следит за транспортировкой машин и контролирует производственный процесс. Этап характерен для автоматов и полуавтоматов. Автоматические операции предотвращают человеческий фактор. С другой стороны, полуавтоматика требует вмешательства человека в рабочий цикл.
Второй
Предполагает реализацию ряда пунктов рабочего процесса. Это контроль оборудования, транспорта, утилизация отходов и пр.
FPS (гибкая производственная система) и автоматизированные линии разработаны и используются в виде производственного оборудования.
Третий
Охватывает все производственные этапы, от разработки до тестирования и отгрузки готовой продукции. На данном этапе ожидается комплексная автоматизация.
Чтобы достичь третьего уровня, необходимо пройти все предыдущие. Производство должно быть оснащено высокотехнологичным оборудованием.
Комплексная автоматизация обеспечивает желаемый эффект с помощью устройства константы большого объема и узкого списка (отдельные элементы для определенного устройства и т. д.). Этот вид выводит предприятие на совершенно новый виток развития и оправдывает себя с точки зрения рентабельности.
Уровень решает следующие проблемы: транспортировка готовой продукции между цехами с использованием автоматически настраиваемого адреса, хранение, утилизация производственных отходов, упр. технологическим процессом с использованием широкого спектра компьютерного оборудования. Здесь требуется минимальное вмешательство людей в производственные операции. В обязанности сотрудника входит только обслуживание оборудования и контроль за состоянием оборудования.
Системы АСУ ТП
Все задачи, стоящие перед автоматизацией производственного процесса, необходимо решать с использованием новейших средств и методов. После внедрения формируется АСУ ТП. Автоматизация процессов управления производством помогает создать основу для дальнейшего внедрения четкой корпоративной и организационной системы.
Автоматизация комплекса управления производственными процессами создает условия для передачи функций контроля и управления определенным автоматически работающим устройствам. Они помогают выполнять все этапы работы информационного потока (сбор, обработка и т. д.). Подобный подход к автоматическому управлению можно отнести к оборудованию (например, станку), комплексу и линии, которая через определенное соединение связана с приборами, которые управляют/измеряют. Быстро и в логической последовательности собирается информация об отклонениях от действующих стандартов в процессе производства, а затем анализируются полученные данные.
Система автоматизации, отвечающая за реализацию той или иной функции, может быстро найти способ регулировать работу всех механизмов, одновременно устраняя существующие отклонения.
Линия связи действует в качестве передатчика команд, содержащих определенные изменения и контролирует все полученные сигналы (команды).
АСУ ТП вместе с новейшими комплексами всего основного и вспомогательного оборудования и инструментов образуют автоматизированные комплексы.
Такие системы требуют контроля. Функции АСУ технологическими процессами могут включать в себя управление конкретным оборудованием, установкой, конвейером или частью предприятия.
Этапы разработки и внедрения
Создание АСУ ТП состоит из нескольких этапов:
- Техническое задание;
- Концепция разработки автоматизированной системы управления процессами;
- Производственный проект системы управления производством;
- Внедрение автоматизированных систем в технологические процессы и анализ их работы.
Разработка технического задания на внедрение означает перечень необходимых исследований перед использованием.
В проектировании задействован ряд специалистов:
- Сотрудники с экономическим образованием;
- Электромеханики;
- Программисты;
- Технологи;
- Персонал, специализирующийся на электромонтаже.
На основе показателей, полученных в ходе предварительных исследований, создается эскизная схема АСУ ТП будущего проекта:
- Разрабатывается функциональная база и алгоритм построения автоматизированной системы.
- Объясняется выбор основных технических компонентов АСУ ТП, предлагается количество и номенклатура.
- Ставится задача по обновлению оборудования.
После проведения всех необходимых исследований, перед внедрением, техническое задание должно включать:
- Список всего функционала в рамках проекта;
- Технико-экономическое обоснование установки системы;
- Виды и объем работ, необходимых для внедрения и проектирования;
- Составление плана работ по ремонту, пуско-наладке, установке и полного перечня испытаний автоматизированных систем.
Как безболезненно автоматизировать предприятие
Во-первых, ищите тех, для кого автоматизация процессов производства — «дело жизни». Того, кто имеет успешный опыт и профессиональную команду. Это залог успешного проекта.
Во-вторых, создайте группу сотрудников, ответственных за автоматизацию на предприятии либо определите ответственное лицо по проекту.
В-третьих, заручитесь поддержкой руководителей отделов. Заинтересуйте их идеями, продемонстрируйте преимущества этого процесса.
В-четвертых, детально проработайте техническое задание и бюджет.
В-пятых, заключите договор с компанией-исполнителем и пропишите в нем этапы реализации проекта.

Мотивация сотрудников предприятия
Работа многих рабочих будет заменена автоматикой, т.к. автоматизация технологических процессов и производств потеряет смысл, если не сократить штат.
- Перераспределите обязанности среди сотрудников. HR-департамент вашего предприятия должен провести грамотную работу, установив определенные требования к подбору персонала, который и дальше будут работать, но уже на новом оборудовании. Объясните, как автоматизация влияет на производственные процессы и заработную плату. Чтобы продемонстрировать интерес работников, необходимо озвучить основные аргументы:
— автоматизация облегчает прогнозирование и различные этапы управления, сводя к минимуму влияние человеческого фактора. Практика обычно показывает значительное улучшение качества продукции и производительности. Это влияет на рост заработной платы;
— для рабочих, работающих с новой автоматикой, откроются возможности для карьерного роста, а также повысится заработная плата;
— сотрудникам, эксплуатирующим автоматические линии, платят больше, потому что их работа более ценная и требует определенной квалификации. - Обучите персонал работе с новым оборудованием. Обучение персонала должно проходить в два этапа. На первом этапе нужно обучить технических специалистов, так как они занимаются стажировкой персонала. Эти сотрудники проходят обучение у компании-исполнителя.
- Заранее позаботьтесь о технической грамотности ваших сотрудников. Низкоквалифицированные рабочие обычно более склонны противостоять новаторским идеям. При отборе соискателей учитывайте техническую компетентность будущего сотрудника.
Этот алгоритм помогает компании подготовить квалифицированный персонал, который сможет эффективно работать, а также привести устройство в рабочее состояние в случае выхода из строя.
Значение автоматизации и автоматизированных систем управления
Под автоматизацией понимается использование специализированных технических средств при управлении различными устройствами и технологическими процессами для освобождения человека от участия в технологических процессах, либо уменьшения степени этого участия или трудоёмкости выполняемых операций.
В чем заключается цель автоматизации? Автоматизированные устройства и системы управления предназначены для замены человека в процессе выполнения определенной деятельности. Обычно это повторяющиеся задачи, в которых человеческий фактор можно заменить умным алгоритмом.
Автоматизированная система управления технологическим процессом (АСУ ТП) — это комплекс методов и средств, который позволяет управлять технологическими операциями на производстве с минимальным вмешательством персонала.
Важность и польза автоматизации заключается в основном в экономии ресурсов, избавлении от рутинных задач и обеспечении безопасности технологических процессов.
Разделяют полностью автоматические (работающие без участия человека) и автоматизированные установки (с участием человека).

Основные преимущества автоматизации
Необходимость автоматизации различных технологических процессов обусловлена увеличением производительности, быстроты движений, размеров и мощности машин, увеличением точности обработки и усложнением самого характера технологического процесса.
Развитие машин неминуемо приводит к тому пределу, когда для человека становится затруднительным или даже невозможным достаточно быстро и точно управлять движением машины.
Современный блюминг прокатывает в год миллион тонн стали. Если всеми его огромными механизмами управлять вручную, то неизбежны простои, пока человек будет обдумывать, какое действие предпринять. Опыт показывает, что на эти простои может уходить до 20% рабочего времени, а это означает потерю 200 000 тонн проката в год.
Современная техника требует и чрезвычайно точного управления, отсутствия субъективных ошибок. Существуют шлифовальные станки, производящие обработку деталей за несколько секунд, причем точность обработки достигает микрона (0,001 мм). При ручном управлении подачей шлифовального круга был бы неизбежен большой процент брака.
Между тем дополнительный аппарат — устройство для управления станком — обеспечивает надлежащую быстроту и точность управления и почти полное отсутствие брака.
При аварии в электрической сети необходимо быстро отключить участок, на котором произошло повреждение, от всей системы, промедление в какую-нибудь секунду, а иногда и в долю секунды может вызвать серьезную аварию.
Человек не успевает реагировать на опасное явление с нужной быстротой. Следовательно, необходимо автоматизированное устройство для управления, которое достаточно быстро осуществило бы в случае надобности соответствующее отключение.
При управлении современной крупной электростанцией требуется временно поддерживать заданные значения напряжения на шинах генераторов, значение частоты, т. е. скорость вращения валов турбин, давление пара, его температуру, уровень воды в котлах к т. д.
Если учесть, что часть этих величин зависит друг от друга и от различных внешних факторов (например, нагрузки электростанции), могущих быстро изменяться, то станет ясным, насколько сложна задача управления.
Электростанция может успешно осуществляться лишь при наличии автоматических устройств для управления, работающих без непосредственного участия человека.
Увеличение высоты и скорости полета современных самолетов, снабжение их броней требует усовершенствования противовоздушной обороны. Необходимо повышение скорострельности зенитных орудий, увеличение скоростей вылета снарядов, увеличение их веса и т. д., что вызывает увеличение размеров и веса подвижной части орудия.
Необходимо также обеспечить большую точность и быстроту наводки ствола орудия. Требуемая точность достигает 0,05 градуса, а скорость движения ствола — 30 — 40 градусов в секунду.
Кроме того, нужно с чрезвычайно большой быстротой и точностью измерять координаты цели и решать задачу встречи, направляя ось ствола в так называемую «упрежденную» точку, чтобы осуществить попадание в движущуюся цель.
Человек не может ни вращать ствол тяжелого орудия с требуемой быстротой и точностью, ни засекать координаты цели и производить необходимые вычисления в течение малых промежутков времени.
Поэтому в настоящее время зенитные установки снабжаются сложнейшими устройствами для управления, осуществляющими требуемые операции без непосредственного участия человека.
Зенитные батареи включают в себя радиолокационные установки, электромеханические и электронные вычислительные приборы и следящие системы.

Из изложенного следует, что современная техника требует создания устройств для управления без непосредственного участия человека. Эти устройства и системы называются автоматическими.
Мощным стимулом автоматизации ряда технологических операций является значительная экономия, получаемая от высвобождения человека и замены его автоматом.
Особенно большое развитие автоматические устройства и системы получили тогда, когда появилась электрическая аппаратура, электронные приборы, а в последние 50 лет аппаратура нового типа — электронно-вычислительные машины.
Автоматизированные и автоматические системы позволили освободить человека от управления рядом процессов, в которых он ранее считался незаменимым.
Роль человека в автоматизированном процессе
В настоящее время автоматические устройства проникли во все отрасли производства, в транспорт и сложные боевые машины. В ряде мест производственный процесс становится полностью автоматизированным. Но значит ли это, что такой процесс протекает гам по себе, совершенно не нуждаясь в участии человека?
Конечно, человеку теперь не нужно вмешиваться в каждое отдельное движение машины и самому переводить любой рычаг. Однако роль человека не только не сводится к нулю в автоматизированном процессе, но, наоборот, значительно повышается и становится более ответственной.
Человек управляет теперь не одной отдельной машиной, а сложнейшей системой машин-автоматов. Обеспечивать нормальную работу сложной автоматизированной системы дело гораздо более трудное и квалифицированное, чем управление каждой отдельной машиной.
Но зато и производительность автоматизированной сис темы несравненно выше, чем производительность простой машины, поэтому и роль автоматики особенно возрастает.

Задачи автоматической системы
Основная задача автоматической системы заключается в том, чтобы поддерживать требуемые значения показателей какого-либо процесса без непосредственного участия человека.
Напряжение на шинах генератора должно поддерживаться равным некоторой требуемой постоянной величине независимо от изменения различных факторов, например, тока нагрузки генератора.
Угловое положение оси ствола зенитного орудия, например, азимут этой оси, должно совпадать с угловым положением задающей оси, устанавливаемым устройством управления, независимо от любых факторов (например, от импульсов реакции, производимых вылетающими из ствола снарядами).
Температура закалочной печи должна в течение процесса закалки изменяться по некоторой определенной установленной программе независимо от любых факторов, например, от температуры помещения.
В каждом из этих примеров имеется величина, значение которой требуется поддерживать постоянным или изменять надлежащим образом. Эта величина называется регулируемой величиной.
В случае генератора регулируемой величиной является напряжение, в случае зенитного орудия — угловое положение ствола, в случае печи — ее температура.
В любой автоматической системе требуется поддерживать значение регулируемой величины равным какому-либо требуемому, иногда называемому установленным, значению.
В случае регулирования напряжения генератора установленное значение есть некоторая постоянная величина. В случае управления зенитным орудием установленным значением является угловое положение задающей оси, которое, вообще говоря, может изменяться по любому закону, в зависимости от произвольного движения цели.
В случае закалочной печи установленное значение, не являясь постоянным, изменяется по некоторой определенной заданной программе.
Однако задача автоматической системы — осуществить равенство регулируемых величин установленным значениям — остается одной и той же для любой из этих систем.
Автоматизация на практике:
Присоединяйтесь к нашему каналу в Telegram «Автоматика и робототехника»! Узнавайте первыми о захватывающих новостях и увлекательных фактах из мира автоматизации: Автоматика и робототехника в Telegram
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети: