10.4. Измерение неэлектрических величин электрическими методами
Электрические измерительные приборы, применяемые для измерения неэлектрических величин, имеют большие преимущества по сравнению с неэлектрическими приборами, так как они позволяют как осуществлять дистанционные измерения, так и обеспечивать широкий диапазон чувствительности, а также позволяют измерять параметры различных быстропротекающих процессов.
Для измерения любой неэлектрической величины электрическим методом необходимо иметь преобразователь (датчик), преобразующий неэлектрическую величину в электрическую, измерительный прибор и промежуточную цепь, связывающую датчик с измерительным прибором. Датчики подразделяют на две основные группы: параметрические и генераторные. Параметрические датчики преобразуют неэлектрические величины в электрические параметры r, L, С, М, μ Генераторные датчики преобразуют неэлектрические величины в Е, U, I, Р.
Электрические измерительные приборы, применяемые для измерения неэлектрических величин, градуируют непосредственно в единицах этих величин.
Датчики обычно характеризуют чувствительностью и разрешающей способностью. Под чувствительностью датчика понимают отношение

(10.19)
где ∆aвых — изменение значения электрической величины на выходе датчика; ∆aвх — изменение значения неэлектрической величины на его входе.
Под разрешающей способностью датчика понимают предел изменения измеряемой неэлектрической величины, в котором погрешность преобразования не превышает допустимого значения.
Из параметрических датчиков наиболее распространенными являются реостатные (датчики сопротивления), емкостные, индуктивные датчики, датчики с терморезисторами, фотоэлектрические датчики, тензорезисторы, а из генераторных датчиков — термоэлектрические (термопары) и индукционные, в которых неэлектрическая величина преобразуется в э. д. с.
Реостатные датчики обычно используют в сочетании с магнитоэлектрическими логометрами. В этих датчиках измеряемая неэлектрическая величина воздействует на движок реостата, изменяя его положение и соответственно сопротивление реостата. Этот прибор может быть применен, например, для измерения уровня жидкости (рис. 10.14), причем шкалу логометра в этом случае можно отградуировать непосредственно в единицах измеряемого уровня.
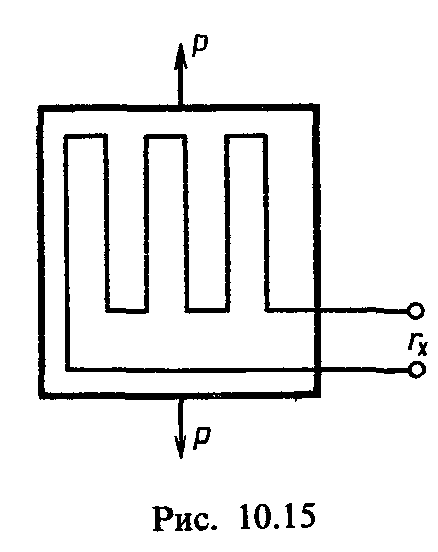
Для измерения деформаций различных конструкций используют тензорезисторы — датчики, сопротивление которых меняется вследствие изменения их геометрических размеров (рис. 10.15). Такие датчики изготовляют из константановой проволоки диаметром 20 — 30 мкм, обладающей большим удельным сопротивлением, и наклеивают непосредственно на ту деталь, деформацию которой необходимо измерить.
Для измерения температур используют различные параметрические и генераторные преобразователи, наибольшее распространение из которых получили термоэлектрические датчики (термопары) и терморезисторы (термисторы). Работа датчиков с термисторами основана на зависимости сопротивления проводников и полупроводников от температуры. Следует отметить, что при измерениях с использованием параметрических дат-



чиков всегда требуется вспомогательный источник электрической энергии.
Индуктивные и емкостные датчики применяют, как правило, в сочетании с электромагнитными и электродинамическими логометрами при питании измерительного устройства переменным током.
В качестве примера рассмотрим измерение уровня жидкости индуктивным датчиком (рис. 10.16). Принцип работы прибора основан на изменении индуктивности катушки при перемещении ее сердечника (или изменений воздушного зазора) под действием измеряемой механической величины. Железный сердечник 2 связан с поплавком 3, перемещение которого влияет на индуктивность катушки 1. При изменении индуктивности катушки происходит изменение ее индуктивного сопротивления и тока в ее цепи.
Индуктивные датчики могут быть использованы для измерения как для сравнительно больших, так и достаточно малых перемещений, например для контроля небольших изменений толщины листа при прокатке.
Емкостные датчики применяют для измерения перемещений, толщины диэлектриков, механической силы и т. д. Например, в емкостном датчике при измерении толщины ленты 2 (рис. 10.17) происходит изменение емкости за счет изменения размеров воздушного промежутка между пластинами 1 воздушного конденсатора, вследствие чего изменяется емкостное сопротивление конденсатора и ток в измерительной цепи.
В заключение отметим, что с помощью одного и того же типа датчика можно измерять и контролировать различные неэлектрические величины. Если при измерениях и контроле изменения электрической величины на выходе датчика малы, то необходимо использовать промежуточные усилители.
8. Электрические измерения неэлектрических величин
В окружающем нас мире существует великое множество неэлектрических величин. И для оценки их значений в настоящее время широко используются электрические методы и средства измерений. Для того, чтобы использовать все достоинства электрических форм преобразования информации, необходимо предварительно преобразовать неэлектрическую физическую величину в электрическую (электрическое напряжение, ток, электрическое сопротивление или емкость, частоту следования импульсов, индуктивность, заряд или др.).
Рассмотрим применение этих подходов на примере измерения некоторых неэлектрических величин, наиболее часто встречающихся в практических задачах.
Температура – одна из важнейших физических величин, оцениваемых в задачах различных научных, технических, промышленных исследований. В настоящее время используются как электрические, так и неэлектрические методы и средства измерения температуры. Неэлектрические методы представлены, например, обычными жидкостными термометрами. Электрические методы (основа современных измерений) реализованы, например, в термометрах и регистраторах на основе термоэлектрических преобразователей.
Различают статические (в которых предполагается неизменность значения температуры в течение времени наблюдения) и динамические измерения (когда процесс достаточно быстро меняется и принципиально важно знать характер поведения величины и (или) важно оперативно отслеживать все изменения, как, например, в системе автоматизированного управления). Существует также деление средств измерения температуры на показывающие и регистрирующие. Первые реализуют статические модели и имеют только шкалу или цифровой индикатор для отсчета текущего значения. Вторые предназначены для динамических моделей и позволяют записывать изменения температуры (как функции времени) в течение некоторого, порой достаточно длительного, интервала времени.
По способам преобразования информации методы и средства измерения (регистрации) делят на аналоговые и цифровые. Цифровые термометры имеют ряд известных преимуществ перед аналоговыми – более высокие метрологические и эксплуатационные характеристики, быстродействие, надежность. Кроме того, цифровая форма представления информации обеспечивает простоту дальнейшей автоматизированной обработки, хранения, передачи и представления данных.
По принципу взаимодействия прибора с объектом методы и средства измерения температуры делятся на контактные и бесконтактные. Первые проще в применении и могут обеспечивать более высокую точность. Вторые удобнее в работе (а в некоторых задачах просто незаменимы), позволяют получить результат быстрее, хотя, может быть, и с большей погрешностью.
Многоканальные измерители (регистраторы) температуры предназначены для регистрации нескольких процессов и/или синхронных измерений температуры в нескольких точках.
В настоящее время в практике температурных измерений используются, как правило, цифровые средства измерения температуры, основанные на электрических методах преобразования. При этом применяются как статические, так и динамические модели объектов и процессов. Одинаково широко распространены и контактные, и бесконтактные методы и средства.
Одноканальные измерители применяются чаще многоканальных, хотя широко используются комбинированные цифровые приборы, которые могут измерять две или несколько различных физических величин, например, температуру и относительную влажность воздуха или температуру и скорость потока воздуха (термоанемометр). Среди регистраторов температуры многоканальность встречается чаше, чем в показывающих приборах.
Основными требованиями, предъявляемыми к средствам измерения и регистрации температуры (как и к другим средствам технических измерений), являются: необходимая достоверность результатов измерения, надежность и возможность работы в жестких условиях эксплуатации, малые габаритные размеры и масса, простота и удобство работы, отсутствие влияния (точнее – пренебрежимо малое влияние) на ход исследуемых процессов, наглядность представляемой информации, доступная цена.
8.1.1. Контактные методы и средства измерений
Если преобразовать неэлектрическую физическую величину – температуру θ – в какую-либо пропорциональную электрическую величину (ЭДС Е, напряжение U, ток I, сопротивление R, частоту сигнала f и т.п.) с помощью первичных измерительных преобразователей, то затем ее значение можно легко определить средствами электрических измерений.
При построении первичных измерительных преобразователей (датчиков) используются разнообразные физические эффекты. В основном применяются следующие разновидности термоэлектрических датчиков:
- металлические термометры сопротивления (ТС);
- термоэлектрические преобразователи (ТП) – термопары;
- полупроводниковые термометры сопротивления (термисторы);
- полупроводниковые интегральные сенсоры (датчики);
• пьезоэлектрические (кварцевые) преобразователи с частотным выходным сигналом. Основные англоязычные термины этого класса преобразователей таковы: Resistance Temperature Detector (RTD) – термометр сопротивления; Thermo-Couple (ТС) – термопара; Thermistor – термистор; Monolithic Linear Temperature Sensor – монолитным полупроводниковый датчик (с линейной характеристикой преобразования); Quartz Sensor – кварцевый датчик. Рис. 8.1 качественно иллюстрирует различия в характеристиках преобразования наиболее распространенных типов датчиков. а б в г д Рис. 8.1. Различия характеристик датчиков температуры: а – термометр сопротивления; б – термопара; в – термистор; г – интегральные полупроводниковые датчики; д – кварцевый резонатор Можно кратко охарактеризовать основные особенности этих первичных измерительных преобразователей следующим образом. Металлические ТС обеспечивают высокую точность, хорошие линейность, стабильность и повторяемость характеристик. Основные недостатки — возможное значительное влияние (на результат измерения) сопротивления проводников линии связи, необходимость дополнительного источника питания (напряжения или тока). Кроме того, возможен саморазогрев ТС от протекающего по нему тока, что может привести к дополнительным погрешностям. Термопары не требуют вспомогательного источника питания, имеют широкий диапазон измеряемых температур. Однако им присуща заметная нелинейность характеристики преобразования. Некоторые проблемы создает необходимость учета (или компенсации) влияния температуры свободных концов ТП на результат измерения. Кроме того, малое выходное напряжение (и сравнительно невысокая чувствительность) требует довольно чувствительных вторичных преобразователей (усилителей) и/или выходных приборов. Термометры сопротивления и термопары отличаются достаточно высокими точностью, стабильностью и повторяемостью своих характеристик преобразования. Термисторы (полупроводниковые сопротивления), в свою очередь, имеют высокую чувствительность, простую двухпроводную схему включения (не требующую компенсации температуры свободных концов, как у ТП), сравнительно высокое быстродействие. Но при этом у них есть серьезные недостатки: резко нелинейная характеристика преобразования и плохая повторяемость характеристики. Кроме того, они имеют сравнительно узкий диапазон измеряемых температур. Полупроводниковые интегральные датчики характеризуются высокой линейностью характеристики преобразования, однако имеют ограниченный диапазон измеряемых температур (до 150. 200°С) и, кроме того, требуют наличия внешнего источника питания. У датчиков на основе кварцевых резонаторов выходной величиной является изменение резонансной частоты колебаний при изменении температуры. Такие датчики обеспечивают наиболее высокую точность, правда, в узком диапазоне температур. Кроме того, часто основные параметры характеристики преобразования таких датчиков и их температурные коэффициенты не стандартизованы и подразумевают индивидуальную градуировку. Все упомянутые датчики выпускаются в различном конструктивном исполнении, что позволяет решать самые разнообразные задачи (работать с жидкостями, газами, сыпучими средами, с поверхностями различных профилей, в различных температурных диапазонах и др.). Есть датчики для поверхностных измерений, погружные, воздушные, магнитные датчики (которые легко крепятся на ферромагнитных, например, стальных поверхностях), датчики, закрепленные на «липучей» ленте, датчики на подшипниках и др. Контактные электрические методы, реализованные в различных средствах измерения/регистрации на основе таких преобразователей, позволяют работать в достаточно широком диапазоне температур (–200. +2000 °С). Погрешность таких контактных измерителей температуры зависит не только от качества первичных измерительных преобразователей (датчиков), но и от организации линии связи датчик – измеритель, а также от характеристик вторичных преобразователей. Типичные значения погрешностей таких термометров ±(0,2. 1)%, хотя в некоторых моделях достигаются значения погрешностей ±(0,01 . 0,1) %. Типичная чувствительность результатов измерения – доли градуса Цельсия. Рассмотрим подробнее особенности применения наиболее распространенных типов датчиков. Термометры сопротивления. Приборы и преобразователи на основе металлических ТС используют зависимость электрического сопротивления металлов Rт от температуры θ. У чистых металлов эта зависимость практически линейна и количественно выражается следующим образом: Rт = R0 (1 +αθ), где R0 – сопротивление при температуре 0 °С; α – температурный коэффициент сопротивления. Температурный коэффициент сопротивления α, 1/°С, определяется по формуле α =(R/ R) / θ, где R/ R – относительное изменение сопротивления датчика при изменении температуры θ. Этот коэффициент можно задать иначе, % / °С: α =(R100 / R) / θ. Значения температурного коэффициента сопротивления α у современных ТС лежат в диапазоне 0,003. 0,006 1/°С, что соответствует приращению сопротивления примерно на 0,3. 0,6 % от исходного (номинального) значения (при 0 °С) при увеличении температуры на 1 °С. Наиболее часто используемые материалы: медь (для диапазона температур – 50. + 200°С) и платина (для диапазона – 250. + 1000 °С) – рис. 8.2. Номинальные значения сопротивления ТС определяются конструкцией и материалом датчика, конкретной градуировкой и лежат в диапазоне 10. 1000 Ом (при 0°С или при комнатной температуре). Медные ТС выпускаются с различными номинальными значениями сопротивления: 25. 1000 Ом. Например, на рис. 8.2, а показана характеристика медного ТС с номинальным (при 0 °С) сопротивлением R0 – 53 Ом. Платиновые ТС довольно широко распространены в различных технических измерениях. Они изготовляются из чистой платины (99,99 %). Чаше всего используются ТС с номинальным сопротивлением 100 Ом (Рt 100) при 0 °С, хотя существуют ТС и с другими значениями номинального сопротивления: 25, 500, 1000 Ом. Номинальные значения токов, протекающих по ТС, обычно таковы: 1 мА (для Р1 100) и 0,1 мА (для Рt 1000). Температурный коэффициент сопротивления а платиновых (Рt 100) ТС имеет два значения: по европейской версии αе = 0,00385 Ом/Ом/°С и по американской версии αа = 0,00392 Ом/Ом/°С (рис. 8.2, б). Конструктивно ТС состоят из собственно чувствительного элемента, защитного кожуха (чехла) и элементов крепления. Чувствительный элемент представляет собой намотку из тонкой изолированной проволоки (диаметром доли миллиметра) на диэлектрическом каркасе (стержне), выполненном из слюды, керамики или стекла. Существуют также ТС фольгового (тонкопленочного) исполнения, обеспечивающего минимальную тепловую инерционность датчика. Фольговые (пленочные) ТС имеют в 5. 10 раз меньшее значение времени реакции (отклика), а б Рис. 8.2. Характеристики медных (а) и платиновых (б) ТС чем у проволочных ТС, что чрезвычайно важно при работе с миниатюрными объектами в динамических измерениях при быстроменяющихся температурах. Как правило, ТС включаются в мостовые схемы. Различают уравновешенные и неуравновешенные мостовые схемы. Уравновешенный мост имеет один или несколько резисторов, сопротивление которых может целенаправленно изменяться (вручную или автоматически) с тем, чтобы добиться равновесия. Равновесие моста характеризуется отсутствием разности потенциалов (и, следовательно, тока) в измерительной диагонали моста (в цепи чувствительного нулевого индикатора И), что означает равенство произведений сопротивлений R1, R2, R3, Rx резисторов R1, R2, R3, Rx противоположных плеч моста (рис. 8.3, а): RxR2 = R1R3 Рис. 8.3. Включение ТС в мостовую схему Зная значения сопротивлений R1, R2, R3, можно определить значение неизвестного сопротивления: Rx = R1R3 / R2. Если в роли Rx выступает ТС с сопротивлением Rт (рис. 8.3, б), то можно, зная характеристику ТС, оценить значение температуры θ, которая действует на датчик. В случае неуравновешенного моста значение Rт сопротивления ТС (и, следовательно, температуры θ) определяется по значению разности потенциалов измерительной диагонали моста. Уравновешенные мосты обладают более высокой точностью в сравнении с неуравновешенными. Главная проблема при работе с датчиками – ТС – влияние на результат измерения сопротивления проводников линии связи rл.с. Не всегда мостовая схема может быть расположена в непосредственной близости от объекта, на котором установлен датчик, поэтому в общем случае может потребоваться многометровая линия связи. В зависимости от специфики конкретных задач измерений применяются двухпроводное, трехпроводное или четырехпро-водное подключение ТС к измерителю. Преимущество двухпроводной схемы в том, что для подключения ТС требуются всего два проводника линии связи (что особенно важно в случаях, когда линия связи большой длины). Однако при двухпроводной линии связи (см. рис. 8.3, б) сопротивление rл.с соединительных проводников (и его изменения при естественных колебаниях температуры окружающей среды) прямо входит в результат измерения. Поскольку длина линии связи может быть значительной (десятки метров), то и погрешность может оказаться большой. Существуют различные способы компенсации этой погрешности. Один из них – использование трехпроводной схемы подключения ТС (рис. 8.4, а). В этом случае при равновесии мостовой схемы выполняется соотношение (Rт + rл.с) R2 = R1(R3 + rл.с) а б Рис. 8.4. Трехпроводное (а) и четырехпроводное (б) включение ТС Если в схеме моста R1 = R2 и сопротивления rл.с соединительных проводников одинаковы (это естественное предположение), то результат измерения будет определяться только температурой ТС и не будет зависеть от значения сопротивлений rл.с. Отметим, что сопротивление проводника rл.с в цепи индикатора И не имеет значения, так как в случае равновесия моста в этой цепи тока нет. Применяются также и четырехпроводное включение (рис. 8.4, б). Правда, это уже не мостовая схема. В основе такого измерителя источник известного постоянного тока I0, который протекает через сопротивление ТС Rт. При этом сопротивления соединительных проводников rл.с и их изменения практически не влияют на значение тока I0 и, следовательно, на результат измерения. Вольтметром V (с большим входным сопротивлением) измеряется падение напряжения собственно на сопротивлении ТС Rт. Одним из проявлений методической погрешности является возможное искажение результата вследствие нагрева ТС протекающим по нему током. Уменьшение напряжения питания моста Е0 позволяет уменьшать этот ток, но в то же время приводит к снижению чувствительности. Поэтому иногда для достижения высокой чувствительности и одновременно сохранения допустимого среднего значения тока в резисторах применяют для питания моста не постоянное напряжение, а импульсное достаточно большой амплитуды. Термопары. Приборы и преобразователи на основе термопар широко распространены. Компактные цифровые термометры на основе термопар являются в настоящее время основным и самым массовым инструментом в температурных измерениях. Выходной сигнал термопары – постоянное напряжение – довольно легко может быть преобразован в цифровой код или измерен простыми средствами (например, малогабаритным цифровым мультиметром). Термопары могут быть подключены для дальнейшего преобразования к различным вторичным измерительным преобразователям (приборам) как аналоговым, так и цифровым, для статических и динамических измерений. Диапазон температур, измеряемых с помощью ТП, довольно широк: от – 200 до +2000 °С. Измерители на основе ТП отличаются высокой точностью и чувствительностью, хорошей повторяемостью характеристики преобразования. Обычный диапазон выходных напряжений составляет 0. 50 мВ (в зависимости от используемых в ТП материалов), типичный температурный коэффициент преобразования (чувствительность ТП) лежит в диапазоне 10. 50мкВ/°С. В основе ТП лежит термоэлектрический эффект, суть которого заключается в следующем. Если два проводника из различных металлов (сплавов) соединены в замкнутую цепь, причем температура одного соединения (спая) заметно отличается от температуры другого, то возникает термоЭДС Ет (и в замкнутой цепи будет протекать ток), значение которой зависит от разности температур спаев и характеристик материалов проводников. Если в разрыв свободных концов включен измеритель ЭДС или вольтметр V, то его показания будут определяться разницей температур (θ1 – θ2) (рис. 8.5, а). а б в Рис. 8.5. Термоэлектрические преобразователи (термопары): а – возникновение термоЭДС; б – термобатарея; в – дифференциальная термопара; θ1 – температура рабочего спая; θ2 – температура свободных концов; V – измеритель ЭДС или напряжения Зависимость термоЭДС от разности температур спаев нелинейна, но для небольших диапазонов температур, при невысоких точностных требованиях (или упрощая взгляд на характеристику ТП) ее можно считать линейной. И тогда значение термоЭДС термопары Ет определяется (в первом приближении) следующим образом: Ет = Sт (θ1 – θ2), где Sт – чувствительность ТП (коэффициент преобразования); θ1 – температура рабочего (так называемого «горячего») спая; θ2 – температура свободных (так называемых «холодных») концов. Для обеспечения однозначной зависимости термоЭДС от температуры θ1 необходимо поддерживать постоянной и известной температуру θ2. Обычно это 0 или +20 °С. Таким образом, зная значение Sт и измерив значение термоЭДС термопары, можно определить температуру θ1. Конечно, для работы в широких температурных диапазонах необходимо пользоваться более точными выражениями – полиномиальными аппроксимациями нелинейной зависимости Ет от разности температур. В современных цифровых термометрах применяется автоматическая линеаризация храктери-стик приеобразования ТП. В настоящее время, как правило, вместо методов и средств поддержания постоянства значения θ2 применяются способы и устройства автоматической компенсации влияния температуры окружающей среды на свободные концы ТП. Для повышения чувствительности таких термометров иногда объединяют последовательно несколько термопар в термобатарею (рис. 8.5, б). При этом рабочие концы всех термопар находятся при температуре исследуемого объекта θ1, а свободные – при постоянной (или известной) температуре θ2. Суммарная выходная термоЭДС, естественно, будет равна сумме термоЭДС отдельных ТП. Для нахождения разности температур двух объектов применяются так называемые дифференциальные термопары, которые состоят из двух встречно включенных ТП (рис. 8.5, в). Рабочие концы ТП имеют разную температуру (θА и θБ), а свободные – одинаковую θ2. В результате выходное напряжение пропорционально разности температур. В соответствии с общепринятой международной классификацией термоэлектрические преобразователи (термопары) разделяются на несколько типов в зависимости от применяемых материалов и характеристик. Характеристики некоторых основных типов ТП приведены в табл. 8.1. Таблица 8.1 Основные характеристики некоторых типов ТП
| ТипТП | Материал ТП | Диапазон измерения (кратковременно), °С | Коэффициент преобразования, мкВ/’Спри 20 °С |
| Е | Хромель — константан | -270. + 1000 | 62 |
| У | Железо — константан | -210. + 1000 (1200) | 51 |
| К(ТХА) | Хромель — алюмель | -200. + 1000 (1372) | 40 |
| Л(ТПП) | Платина — платинородий (13% родия) | -50. +1500 (1700) | 7 |
| 5(ТПП) | Платина — платинородий (10% родия) | -50. +1600 (1768) | 7 |
| Г(ТМК) | Медь — константан | -270. +400 | 40 |
В практике типовых температурных измерений чаще всего используются ТП трех типов: J, К, Т. Термопары типаJ имеют минимальную стоимость, высокую чувствительность, умеренную точность, но не могут (не должны) использоваться длительное время при экстремальных температурах (выше 1000 °С), так как нарушается их градуировочная характеристика. Термопары типа К характеризуются средней стоимостью, средней точностью, хорошей чувствительностью и широким диапазоном температур (до 1300 °С). Именно этот тип ТП является наиболее распространенным. Термопары шипа Т имеют среднюю стоимость, среднюю чувствительность, высокую точность. Они удобны для работы с невысокими температурами. Для работы при высоких температурах и/или в условиях действия агрессивных сред применяются ТП типовR и S. Термисторы. Существует особый класс датчиков – полупроводниковые термометры сопротивления, имеющие значительно больший, чем обычные ТС, температурный коэффициент сопротивления, равный 1. 20 1/°С, причем знак этого коэффициента может быть как положительным (у позисторов), так и отрицательным (у термисторов). Это обеспечивает значительно более высокую чувствительность термометров на их основе. Основные преимущества: малые габариты и масса (и, следовательно, малая теплоемкость и тепловая инерционность), простота конструкции и, следовательно, хорошие надежность и механическая прочность, а также — низкая цена. Основные недостатки этих преобразователей: сравнительно узкий диапазон измеряемых температур (типично – 50. + 150°С), значительная нелинейность преобразования (сопротивление термисторов с ростом температуры уменьшается примерно по экспоненциальному закону), плохая повторяемость характеристики преобразования от экземпляра к экземпляру (что означает необходимость индивидуальной градуировки и затрудняет замену датчиков даже одного типа), значительная временная нестабильность характеристики, особенно при длительной работе на высоких температурах. Интегральные полупроводниковые датчики. Интегральные датчики появились сравнительно недавно благодаря успехам микроэлектроники. Эти датчики обеспечивают выходной сигнал (напряжение или ток), практически линейно зависящий от температуры θ. Схемы подключения этих датчиков к собственно измерителю показаны на рис. 8.7. а б Рис. 8.7. Подключение интегральных полупроводниковых датчиков: a – напряжения; б – тока На рис. 8.7, а приведена схема подключения интегрального датчика напряжения. Выходное напряжение U = f(θ) датчика через усилитель-повторитель подается на вход цифрового вольтметра ЦВ или аналого-цифрового преобразователя АЦП, преобразующего это напряжение, пропорциональное температуре, в цифровой код. Чувствительность таких датчиков обычно 10 мВ/°С. Рис. 8.7, б иллюстрирует подключение интегрального датчика тока. Выходной ток I = f(θ) датчика преобразуется посредством резистора Я в пропорциональное напряжение и также подается на вход ЦВ или на вход АЦП, преобразующего далее это напряжение в цифровой код. Типичная чувствительность таких датчиков обычно составляет 1 мкА/°С. Сравнение возможностей различных датчиков. Сравнить возможности различных датчиков температуры позволяет диаграмма на рис. 8.8, где показаны ориентировочные диапазоны применения наиболее распространенных первичных измерительных преобразователей температуры: термометров сопротивления – платиновых (ТСП) и медных (ТСМ); термоэлектрических преобразователей – термопар различных типов; термисторов; интегральных полупроводниковых датчиков и кварцевых резонаторов. Рис. 8.8. Типичные диапазоны применения датчиков различных типов Для динамических измерений температуры и регистрации быстроменяющихся тепловых процессов важным параметром является тепловая инерционность термоэлектрических преобразователей, которая в основном определяется конструкцией датчика и особенно – устройством его защитной арматуры. В экспериментах с быстроменяющейся температурой, если не учитывать это обстоятельство, возможны значительные динамические погрешности. Это особенно важно для регистраторов и измерителей температуры, работающих в составе систем управления, где, как правило, необходимо обеспечение режима так называемого реального времени. Значение времени реакции датчиков на скачкообразное изменение температуры (времени достижения уровня 99 % асимптотического значения) лежит в диапазоне от единиц секунд до десятков минут. В отдельных специальных разработках конструкций термометров сопротивления (пленочных) и термисторов могут быть достигнуты времена реакции термисторов в десятые доли секунды. Устройство и характеристики цифрового термометра. Рассмотрим один из наиболее распространенных вариантов устройства цифрового термометра (ЦТ), входным датчиком которого является ТП. На рис. 8.9 приведена упрощенная структура контактного ЦТ, которая, естественно, напоминает структуру любого цифрового измерительного прибора. Рис. 8.9. Структура контактного цифрового термометра Термопара подключается ко входу усилителя, назначение которого поднять уровень входного сигнала с единиц-десятков милливольт до единиц вольт. Аналого-цифровой преобразователь АЦП преобразует усиленный сигнал ТП в цифровой код, пропорциональный уровню термоЭДС и, следовательно, значению измеряемой температуры. В автономных ЦТ, как правило, применяются АЦП, использующие интегрирующие методы преобразования, обеспечивающие высокие точность, чувствительность, разрешающую способность, высокое подавление периодических помех общего и нормального вида, уровень которых может быть значительным. Выходной код АЦП запоминается (и затем некоторое время хранится) в регистре и выводится на цифровой индикатор (цифровое отсчетное устройство). Микропроцессорный контроллер управляет работой всех узлов прибора. Он же выполняет функцию линеаризации характеристики ТО. С помощью клавиатуры оператор задает режимы работы. В структуре прибора может присутствовать интерфейс для обмена информацией с внешними цифровыми устройствами (например, для передачи результатов регистрации в персональный компьютер и/или в систему автоматизированного управления). Известны модели многоканальных ЦТ (чаше двухканальных). Отличие этих приборов — наличие коммутатора входных ТП, который позволяет поочередно подключать датчики ко входу усилителя. Двухканальные ЦТ обычно имеют режим измерения разности температур. Такие приборы называются дифференциальными термометрами. Современные ЦТ отличаются малыми габаритами (Hand-held – «удерживаемые в ладони») и массой (100. 500 г), сравнительно низкой стоимостью, достаточно высокими метрологическими и эксплуатационными характеристиками. Возможна работа прибора с термопарами различных типов (например, К,J, T). Прибор имеет цифровой жидкокристаллический индикатор, простую понятную клавиатуру, размещен в пыле-влагозашищенном противоударном корпусе. Укомплектован несколькими термопарами различного конструктивного исполнения (для поверхностного измерения, воздушные, погружные, магнитные и др.). Специфика контактных измерений температуры. Даже при очень точном измерителе (регистраторе) температуры можно получить большую погрешность результата из-за неправильной организации эксперимента, неудачной (неграмотной) установки датчиков на объекте. При контактных измерениях температуры поверхности необходимо учитывать следующие важные обстоятельства.
- Если контакт датчика с объектом недостаточно хорош, мала площадь соприкосновения, то может иметь место слабая теплопередача от объекта к датчику. При этом в общем случае могут также возникать нежелательные тепловые потоки вдоль корпуса зонда (защитного чехла), которые также искажают результат измерения.
- Датчик, установленный на поверхности объекта, в общем случае испытывает не только влияние интересующей экспериментатора температуры, но и температуры окружающей среды. Чем больше разница этих температур, тем сильнее может отличаться результат измерения от ожидаемого (от истинного) значения. Кроме того, может сказываться естественная конвекция воздуха вокруг датчика.
- Если теплоемкость объекта мала (масса и габариты невелики как, например, в случае исследования температуры поверхности контактной клеммы низковольтного маломощного электропривода), то возможно сильное влияние датчика (особенно массивного) на температуру исследуемого объекта (искажение режима объекта). Это приводит к появлению значительной погрешности взаимодействия в статических измерениях и к заметной динамической погрешности при изменениях температуры объекта.
- Если интересует температура горячей воды, текущей внутри трубопровода, и есть результат измерения температуры внешней поверхности этого трубопровода, то необходимо отдавать себе отчет в том, что это не одно и то же. Разность результата измерения и фактической температуры воды может быть весьма значительной (несколько градусов).
Конечно, температуру внешней (доступной) поверхности трубопровода можно измерить с высокой точностью, но установить связь ее с температурой содержимого гораздо важнее (и одновременно сложнее). Следует попытаться определить эту связь теоретически (с помощью хотя бы грубой модели) или экспериментально, например, используя (там, где это возможно) стационарные термометры, погруженные в поток.
Измерение неэлектрических величин электрическими методами.
Измерение неэлектрических величин электрическими методами — обширная область измерительной техники.
Быстрое развитие этой области объясняется возможностью непрерывного измерения, измерения на расстоянии, высокой точностью и чувствительностью.
Соблюдение любого технологического процесса можно обеспечить только применением измерительной техники и автоматики.
В большинстве случаев измерение неэлектрических величин сводится к тому, что неэлектрическая величина преобразуется в зависимую от нее электрическую, измерение которой позволяет определить и неэлектрическую величину. Элемент измерительного устройства, преобразующий неэлектрическую величину в электрическую, называется измерительным преобразователем.
Если неэлектрическая величина преобразуется в один из электрических параметров r, L или C, то преобразователь — параметрический, если неэлектрическая величина преобразуется в э.д.с., то преобразователь — генераторный.
Параметрические преобразователи делятся по принципу действия на следующие группы:
1. Реостатные преобразователи. Зависимость сопротивления реостата от измеряемой неэлектрической величины, которая воздействует на его движок, используется для измерения объема и уровня жидкостей, для измерения перемещения деталей и т.д.
2. Преобразователи контактного сопротивления. В основе их работы лежит зависимость контактного сопротивления от измеряемой величины, например давления, деформации и т.д.
3. Проволочные преобразователи. Их работа основана на изменении сопротивления проволоки при ее деформации.
4. Преобразователи-термосопротивления. Зависимость температуры и сопротивления провода при тепловом равновесии как от тока, так и от ряда физических величин, определяющих окружающую среду, используется для измерения температур, скорости движения газов, для определения составов газа и др.
5. Электролитические преобразователи. Зависимость электрического сопротивления раствора электролита от его концентрации используется для измерения концентрации растворов электролитов и для количественного анализа жидкостей и газов, растворенных в жидкости.
6. Индуктивные преобразователи. Зависимость индуктивности преобразователя от изменения положения одной из его частей под действием измеряемой величины используется для измерения силы, давления, линейного перемещения.
7. Магнитоупругие преобразователи. Зависимость магнитной проницаемости ферромагнитного сердечника преобразователя, а следовательно и индуктивного сопротивления преобразователя от механических напряжений, действующих на сердечник, используется для измерения механических величин.
8. Емкостные преобразователи. Изменение емкости преобразователя под действием силы, давления, линейного перемещения, угла поворота, количества вещества, содержания влаги, используется для измерения этих величин.
9. Фотоэлектрические преобразователи. Получение фототока, определяемого световым потоком, который зависит от измеряемой неэлектрической величины, или получение импульса фототока, частота которых зависит от измеряемой величины, используется для измерения линейных размеров, температуры, прозрачности и мутности жидкостей и газовой среды.
10. Ионизационные преобразователи. Зависимость ионизационного тока от ряда факторов используется для анализа газа и определения его плотно- сти, определения геометрических размеров изделий и т.д.
Генераторные преобразователи делятся по принципу действия на следующие группы:
1. Индукционные преобразователи. Преобразование измеряемой неэлектрической величины в индуцированную э.д.с. используется для измерения скорости, линейных или угловых перемещений.
2. Термоэлектрические преобразователи. Возникновение термо-э.д.с. в цепи преобразователя и зависимость ее от температуры используется для измерения.
3. Пьезоэлектрические преобразователи. Пьезоэлектрический эффект, т.е. возникновение э.д.с. в некоторых кристаллах под действием механических сил, используется для измерения этих сил, давлений и геометрических размеров изделий.
Устройство для измерения неэлектрических величин электрическим путем в простейшем случае состоит из преобразователя, соединительных проводов и измерительного механизма, на шкале которого обычно наносятся значения измеряемой неэлектрической величины. В большинстве же случаев измерительные устройства усложняются применением: а) специальных схем; б) источников питания; в) стабилизаторов; г) выпрямителей; д) усилителей и т.д.
Принцип работы и упрощенные схемы некоторых наиболее распространенных измерительных преобразователей рассмотрены далее.
1. Реостатные преобразователи
Реостатный преобразователь — это реостат (рис. 57), движок которого перемещается под действием измеряемой неэлектрической величины х так, что величина сопротивления реостата r зависит от величины х. Измерив r, можно найти х.
В схемах на рис. 58а и 58б с реостатным преобразователем использованы однорамочные магнитоэлектрические измерительные механизмы, а в схеме на рис. 58в применен двухрамочный механизм логометра.
Пример применения реостатного преобразователя для измерения уровня или объема жидкости показан на рис. 59.
Изменение положения поплавка, определяемого уровнем или объемом жидкости, вызывает изменение сопротивлений r1 и r2 , включенных последовательно с катушками логометра. В результате изменяются отношения токов в катушках и показания прибора. Шкала прибора градуируется в значениях измеряемой величины объема или уровня жидкости.
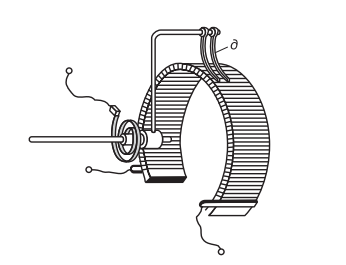
Рис. 57. Реостатный преобразователь
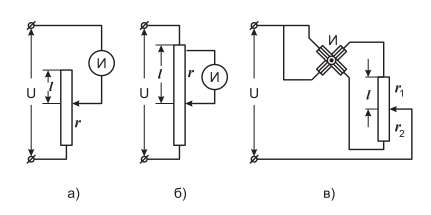
Рис. 58. Схемы с реостатным преобразователем
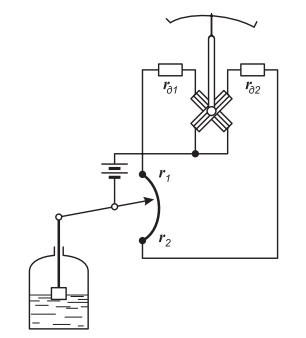
Рис. 59. Схема уровнемера
2. Преобразователи контактного сопротивления
Столбик из 10—15 угольных шайб (d=0,5—1 см), на концах которого расположены латунные диски с выводами для включения в измерительную цепь, зажат между двумя винтами а и б (рис. 60), изолированными от столбика слюдяными прокладками. Электрическое сопротивление столбика зависит от его сжатия, так как при этом изменяется переходное сопротивление между шайбами. Таким образом, по изменению электрического сопротивления столбика можно определить механическую силу Р, действующую на винт б.
Применение двух столбиков (рис. 61) — при действии на которые измеряемой силы Р увеличивается сжатие одного и уменьшается сжатие другого столбика — дает увеличение точности измерения.
Включение двух столбиков в два смежных плеча измерительного моста устраняет влияние температуры на результат измерения, так как изменение температуры вызовет одинаковое изменение сопротивлений обеих столбиков и равновесие моста сохранится.
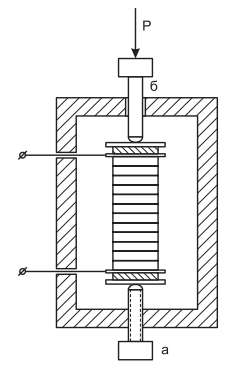
Рис. 60. Преобразователь с угольными шайбами
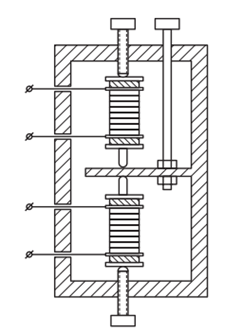
Рис. 61. Дифференциальный преобразователь с угольными шайбами
3. Проволочные преобразователи
Эти преобразователи изготавливаются из тонкой проволоки (d=0,02—0,04 мм), концы которой привариваются к медным выводам (рис. 62). Проволока закрепляется специальным клеем между двумя листочками тонкой бумаги площадью 0,1—10 см2.
Преобразователь приклеивается на поверхность испытываемой детали или конструкции и воспринимает ее деформацию, при этом изменяются размеры, удельное сопротивление материала и сопротивление преобразователя. По относительному изменению сопротивления можно определить механические напряжения, возникающие в детали или конструкции.
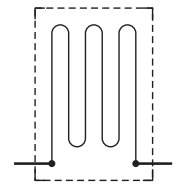
Рис. 62. Схема проволочного преобразователя
Для преобразователей применяется проволока из константана, нихрома или железо-хромоалюминиевого сплава — материалов, обладающих большой относительной чувствительностью, малым температурным коэффициентом и большим удельным сопротивлением.
Сопротивление преобразователя — несколько сотен ом, а относительное изменение сопротивления — десятые доли процента.
Для устранения влияния температуры применяют два одинаковых преобразователя: один — «рабочий», другой — «нерабочий», которые включаются в два смежных плеча измерительного моста. Рабочий преобразователь наклеивается на поверхность испытываемой детали, а нерабочий — на поверхность из такого же металла, что и испытываемая деталь.
Проволочные преобразователи являются разовыми, т.е. наклеиваются 1 раз.
Партия преобразователей, изготовленных из одной и той же проволоки, при одинаковом сопротивлении и одинаковой технологии обладает характеристиками совпадающими с точностью до 1%. Получив указанную характеристику для одного из преобразователей данной партии, можно применять ее для остальных преобразователей этой партии.
4. Термосопротивления
Прохождение электрического тока по проводу сопровождается выделением тепла, которое частично идет на нагревание провода, частично отдается в окружающую среду конвекцией, теплопроводностью и излучением.
При установившемся тепловом равновесии температура провода и его сопротивление зависят от тока в проводе и от причин, влияющих на отдачу тепла в окружающую среду. К ним относятся: размеры провода, его конфигурация и арматура, температура провода и среды, скорость движения среды, ее состав, плотность и др.
Указанные зависимости используются для измерения температуры, скорости, плотности и состава газовой среды по сопротивлению провода. Провод, предназначенный для указанной цели, является измерительным преобразователем и носит название термосопротивления.
При применении термосопротивления необходимо создать условия, в которых измеряемая неэлектрическая величина оказывает наибольшее влияние на величину термосопротивления, а остальные величины, наоборот, по возможности не влияют на его величину. Следует стремиться к уменьшению теплоотдачи, возникающей благодаря теплопроводности выводных зажимов провода и лучеиспусканию. При длине провода, превосходящей в 500 или большее число раз его диаметр, отдачей через теплопроводность выводных зажимов провода можно пренебречь, если разность температур провода и среды не превышает 100 °C.
Рассмотрим газоанализаторы, в которых термосопротивление применяется для определения содержания газа в газовой смеси.
Смесь из двух газов, не вступающих друг с другом в химическую реакцию, имеет теплопроводность, равную среднему арифметическому теплопроводностей составляющих,
где l12, l1, l2 — теплопроводности смеси и ее составляющих; a и b — процентное содержание составляющих газовой смеси.
Приняв во внимание, что (b = 100 – a), можем написать:
Измерив теплопроводность смеси l12 и зная теплопроводности l1 и l2, можно определить процентное содержание одной из составляющих газовой смеси. При этом необходимо, чтобы температура термосопротивления, а следовательно, и его сопротивление при прохождении по нему тока I = const зависели только от теплопроводности смеси.
Газоанализатор углекислого газа (рис. 63) имеет два одинаковых термосопротивления r1 и r2, включенных в два смежных плеча моста. Первое — рабочее — находится в камере, в которой проходит газовая смесь, второе — нерабочее, расположенное в камере с воздухом. На шкале измерителя нанесены деления, дающие значения содержания СО2.
В термометрах сопротивления термосопротивления применяются для измерения температур. Обычно они изготавливаются из проволоки, материал которой должен обладать большим температурным коэффициентом сопротивления: платина до 500 °C, никель до 300 °C, медь до 150 °C. Проволоку наматывают на каркас из пластмассы или слюды и помещают в защитную оболочку, размеры и форма которой определяются назначением термометра.
Сопротивление термометра обычно составляет 50 или 100 Ом.
По величине сопротивления преобразователя определяют его температуру, а следовательно и температуру окружающей его среды.
Для измерения часто применяют схему неуравновешенного моста с магнитоэлектрическим логометром (рис. 64). Три плеча моста r1, r2, r3 выполнены из манганина, четвертое rT — термосопротивление. Две рамки (rЛ1 и rЛ2) логометра включены в диагональ моста, общая точка их через сопротивление r5 соединена с вершиной моста г.
При равновесии моста (r2=r3, r1=rТ, rЛ1=rЛ2), когда потенциалы точек б и в одинаковые, в рамках логометра идут одинаковые токи встречного направления. При нарушении равновесия токи в рамках логометра изменяются. Их приращения не равны и имеют противоположные знаки, что влечет за собой поворот стрелки логометра.
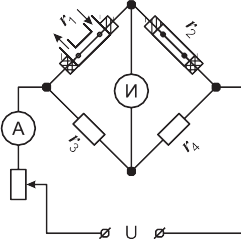
Рис. 63. Схема газоанализатора СО2
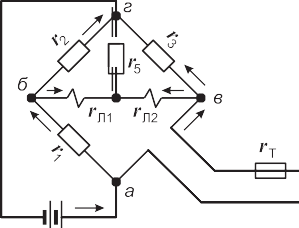
Рис. 64. Схема моста с логометром термометра сопротивления
5. Электролитические преобразователи
Удельная электропроводность электролита зависит от его концентрации, поэтому концентрацию можно определить по величине его сопротивления.
Измерительный электролитический преобразователь представляет собой сосуд с испытуемым электролитом и двумя электродами (рис. 65).
Во избежание электролиза измерение сопротивления электролита производится на переменном токе. Для устранения влияния температуры применяется температурная компенсация. Один из термокомпенсаторов показан на рис. 65. Он представляет собой медно-никелевое сопротивление rк, расположенное в растворе и соединенное с разветвлением из искомого сопротивления rх и шунтирующего манганинового сопротивления r1. Сопротивления r1 и rк подобраны так, что изменение сопротивления электролита, вызванное изменением его температуры, с точностью до 1—2% компенсируется изменением сопротивления rк.
Рис. 65. Схема электролитического преобразователя
Измеряемое сопротивление rх находится по сопротивлению rа,б между точками а, б схемы, которое определяется обычно при помощи неуравновешенного измерительного моста, в одно из плеч которого включаются зажимы а, б электролитического преобразователя. Мост питается через стабилизатор от сети переменного тока. На выходе моста включается выпрямительный миллиамперметр, шкала которого проградуирована в значениях концентрации раствора электролита.
6. Индуктивные преобразователи
Индуктивный преобразователь (рис. 66) — это электромагнит, якорь которого перемещается под действием измеряемой механической величины Р: силы, давления, линейного перемещения. Изменение положения якоря изменяет воздушный зазор d, а следовательно и индуктивность катушки электромагнита и ее полное сопротивление.
В дифференциальном преобразователе (рис. 67) перемещение якоря вызывает увеличение индуктивности одной катушки и уменьшение индуктивности другой, что повышает чувствительность преобразователя. Включение двух катушек в смежные плечи измерительного моста дает температурную компенсацию. В индуктивном преобразователе трансформаторного типа (рис. 68) первичная обмотка питается переменным током с постоянным действующим значением. Под действием измеряемой механической величины Р изменяется воздушный зазор d, магнитное сопротивление цепи, а следовательно и магнитный поток, пронизывающий вторичную обмотку, к зажимам которой присоединен вольтметр. Таким образом, вторичная индуктированная э.д.с. и показания вольтметра зависят от измеряемой величины.
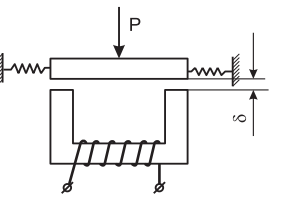
Рис. 66. Схема индуктивного преобразователя
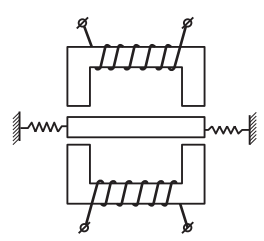
Рис. 67. Схема индуктивного дифференциального преобразователя
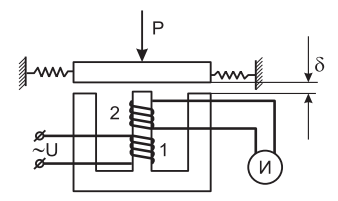
Рис. 68. Схема индуктивного преобразователя-трансформатора
7. Емкостные преобразователи
Емкостный преобразователь представляет собой конденсатор, емкость которого изменяется под действием измеряемой неэлектрической величины.
Так как емкость конденсатора зависит от площади электродов, их формы, расстояния между ними и его диэлектрической проницаемости, то эти преобразователи можно применять для измерения тех неэлектрических величин, значения которых влияют на один из перечисленных выше параметров емкостного преобразователя.
В емкостных манометрах и динамометрах под действием измеряемого давления P или силы F изменяется воздушный зазор d (рис. 69) между двумя пластинами конденсатора.
Работа емкостного преобразователя для измерения толщины резиновой ленты 1, которая протягивается между двумя неподвижными электродами 3 (рис. 70), основана на влиянии толщины ленты на изменение воздушного зазора и емкости преобразователя.
Емкостный преобразователь для измерения влажности зерна, порошка, волокна, пряжи, представляет собой цилиндрический конденсатор (рис. 71). Внутренний электрод имеет форму цилиндрического стержня, наружный электрод — форму стакана, внутреннее пространство до определенного уровня заполняется
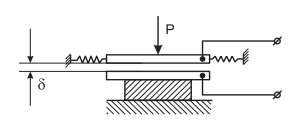
Рис. 69. Принцип работы емкостного манометра и динамометра
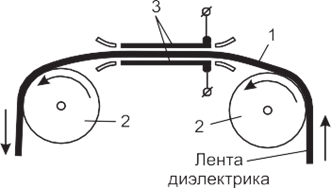
Рис. 70. Схема устройства емкостного преобразователя для измерения толщины ленты
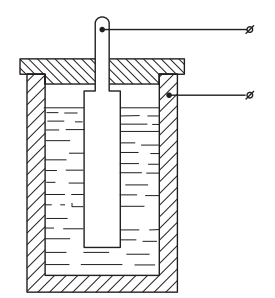
Рис. 71. Принцип устройства емкостного преобразователя влагомера
испытываемым материалом. Содержание влаги в испытываемом материале резко увеличивает емкость вследствие большой диэлектрической проницаемости воды.
Емкостные преобразователи имеют малую емкость, поэтому измерение их емкости производится при повышенной или высокой частоте с помощью электронных усилителей.
8. Ионизационные преобразователи
Структурная схема одного из ионизационных преобразователей с радиоактивным изотопом для непрерывного измерения толщины движущейся ленты или стального проката показана на рис. 72.
Радиоактивное излучение изотопа 1 частично поглощается изделием 2. Количество энергии, полученной датчиком 3, зависит от толщины изделия и материала. Датчик 3 через усилитель 4 соединен с измерительным механизмом 5, дающим значение измеряемой величины.
В измерителе давления газа под действием излучения изотопа 1 (рис. 73) в сосуде 2 происходит ионизация газа. Интенсивность ионизации и ионизационный ток, проходящий по цепи под действием напряжения U, зависят от давления газа. Измерительный механизм 5 включен через усилитель 4 на сопротивление 3, на котором создается падение напряжения, пропорциональное ионизационному току.
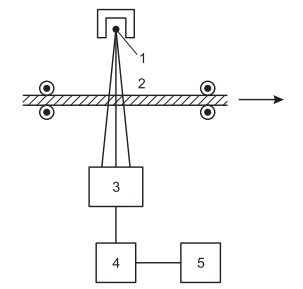
Рис. 72. Схема ионизационного преобразователя для измерения толщины ленты
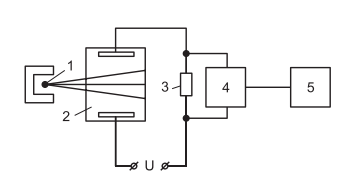
Рис. 73. Схема прибора для измерения давления газа
9. Индуктивные преобразователи
В индукционном преобразователе — приборе для измерения скорости вращения — измеряемая величина преобразуется в пропорциональную ей э.д.с. Тахометр (рис. 74) представляет собой маленькую магнитоэлектрическую машинку, якорь которой вращается между полюсами постоянного магнита, а напряжение на зажимах будет пропорционально скорости вращения якоря. Якорь механически связан с валом машины, скорость которой измеряется, поэтому показание вольтметра, присоединенного к зажимам якоря, пропорционально измеряемой скорости вращения.
Индукционный тахометр с вращающимся магнитом (рис. 75) состоит из алюминиевого диска 1, укрепленного на одной оси со стрелкой 2, и постоянного магнита, механически связанного с валом машины, скорость которой измеряется. При вращении постоянного магнита в диске индуцируется э.д.с. и вихревые токи. В результате взаимодействия вихревых токов с полем постоянного магнита создается вращающий момент, вызывающий поворот диска на угол, при котором этот момент уравновешивается моментом пружины 3. Каждой скорости вращения
соответствует определенный угол поворота подвижной части.
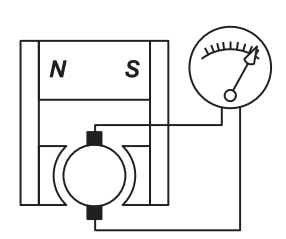
Рис. 74. Схема индукционного тахометра
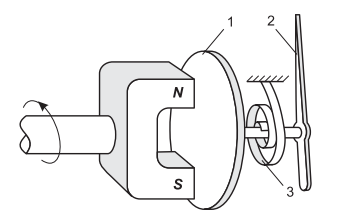
Рис. 75. Устройство тахометра с вращающимся магнитным полем
10. Пьезоэлектрические преобразователи
Пьезоэлектрический эффект, используемый в преобразователях, заключается в появлении электрических зарядов на поверхности некоторых кристаллических диэлектриков (кварц) под действием механических напряжений или деформаций.
Измеряемое давление Р действует на дно корпуса преобразователя (рис. 76), являющееся мембраной. Две пластинки кварца зажаты между тремя металлическими прокладками. Между верхней прокладкой и крышкой корпуса расположен шарик, обеспечивающий равномерность распределения измеряемого давления. К средней прокладке — отрицательному электроду — присоединен провод, изолированный от корпуса втулкой.
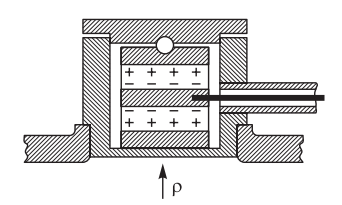
Рис. 76. Пьезоэлектрический кварцевый преобразователь для измерения давления
Разность потенциалов между отрицательным электродом и корпусом пропорциональна давлению Р, которое и определяют по разности потенциалов.
Заряды при снятии давления исчезают, поэтому необходима хорошая изоляция отрицательного электрода.
Отрицательный электрод соединяется с сеткой первой лампы усилителя, на выходе которого включается измерительный механизм.
11. Термоэлектрические преобразователи
Сочетание магнитоэлектрического измерительного механизма с термоэлектрическим преобразователем — термопарой (рис. 77), предназначенное для измерения температур, называется термоэлектрическим пирометром.
Нагревание рабочего конца термопары вызывает термо-э.д.с. и ток в цепи измерительного механизма, по отклонению подвижной части которого и определяется температура. Провода термопары должны быть достаточно длинными, чтобы их свободные концы находились в среде с температурой, при которой градуировался пирометр. При измерении невысоких температур влияние температуры свободных концов термопары может быть очень большим. Для устранения этого влияния свободные концы помешают в термостат с постоянной температурой.
Для термопар применяют: медь — константан (до 300 °C), медь — никель (до 600 °C), железо — копель (до 800 °C), хромель — копель (до 800 °C), хромель — алюмель (до 1300 °C), платину — платинородий (до 1600 °C).
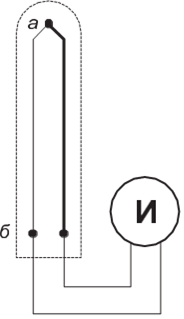
Рис. 77. Схема термоэлектрического пирометра
Для защиты от механических повреждений и действия газов термопары помещают в защитные трубки из латуни, стали, фарфора или других материалов.
Электрические измерения неэлектрических величин

Измерение различных неэлектрических величин (перемещений, усилий, температур и т. п.) электрическими методами выполняют с помощью устройств и приборов, преобразующих неэлектрические величины в зависимые от них электрические, которые измеряют электроизмерительными приборами со шкалами, градуированными в единицах измеряемых неэлектрических величин.
Преобразователи неэлектрических величин в электрические, или датчики , разделяют на параметрические , основанные на изменении какого-либо электрического или магнитного параметра (сопротивления, индуктивности, емкости, магнитной проницаемости и т. п.) под действием измеряемой величины, и генераторные , в которых измеряемая неэлектрическая величина преобразуется в зависимую от нее э. д. с. (индукционные, термоэлектрические, фотоэлектрические, пьезоэлектрические и другие). Параметрическим преобразователям необходим посторонний источник электрической энергии, а генераторные сами являются источниками энергии.
Один и тот же преобразователь можно использовать для измерения различных неэлектрических величин и, наоборот, измерение какой-либо неэлектрической величины можно выполнить с помощью преобразователей различных типов.
Кроме преобразователей и электроизмерительных приборов, установки для измерения неэлектрических величин имеют промежуточные звенья — стабилизаторы, выпрямители, усилители, измерительные мосты и т. п.
Для измерения линейных перемещений применяют индуктивные преобразователи — электромагнитные устройства, у которых параметры электрических и магнитных цепей изменяются при перемещении ферромагнитного магнитопровода или якоря, соединенного с перемещающейся деталью.
Для преобразования значительных перемещений в электрическую величину используют преобразователь с подвижным ферромагнитным поступательно движущимся магиитопроводом (рис. 1, а). Поскольку положение магнитопровода определяет индуктивность преобразователя (рис. 1, б), а следовательно, и его полное сопротивление, то при стабилизированном напряжении источника электрической энергии переменного напряжения неизменной частоты, питающего цепь преобразователя, можно по току судить о перемещении детали, механически связанной с магнитопроводом. Шкалу прибора градуируют в соответствующих единицах измерения, например в миллиметрах (мм).
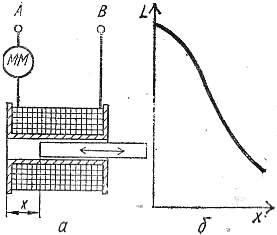
Рис. 1. Индуктивный преобразователь с подвижным ферромагнитным магнитопроводом: а — схема устройства, б — график зависимости индуктивности преобразователя от положения его магнитопровода.
Для преобразования малых перемещений в удобную для электрического измерения величину применяют преобразователи с изменяющимся воздушным зазором в виде подковы с обмоткой и якорем (рис. 2, а), который жестко связан с перемещаемой деталью. Всякое перемещение якоря приводит к изменению тока / в обмотке (рис. 2, б), что позволяет при неизменном переменном напряжении стабильней частоты градуировать шкалу электроизмерительного прибора в единицах измерения, например в микрометрах (мкм).
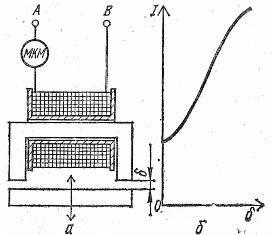
Рис. 2. Индуктивный преобразователь с изменяющимся воздушным зазором: а — схема устройства, б — график зависимости тока обмотки преобразователя от воздушного зазора в магнитной системе.
Большей чувствительностью обладают дифференциальные индуктивные преобразователи с двумя одинаковыми магнитными системами и одним общим якорем, расположенным симметрично относительно обоих магнитопроводов с воздушным зазором одинаковой длины (рис. 3), у которых линейное перемещение якоря из его среднего положения одинаково изменяет оба воздушных зазора, но с разными знаками, что нарушает равновесие предварительно уравновешенного моста переменного тока из четырех обмоток. Это дает возможность судить о перемещении якоря по току измерительной диагонали моста, если он получает питание при стабилизированном переменном напряжении неизменной частоты.
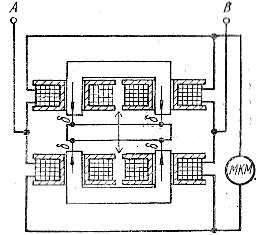
Рис. 3. Схема устройства дифференциального индуктивного преобразователя.
Для измерения механических усилий, напряжений и упругих деформаций, возникающих в деталях и узлах различных конструкций, применяют проволочные преобразователи — тензорезисторы , которые деформируясь, вместе с исследуемыми деталями, наменяют свое электрическое сопротивление. Обычно сопротивление тензорезистора составляет несколько сотен ом, а относительное изменение его сопротивления — десятые доли процента и зависит от деформации, которая в пределах упругости прямо пропорциональна приложенным усилиям и возникающим механическим напряжениям.
Тензорезисторы изготовляют в виде зигзагообразно расположенной проволоки большого удельного сопротивления (константан, нихром, манганин) диаметром 0,02 — 0,04 мм либо из медной специально обработанной фольги толщиной 0,1 — 0,15 мм, которые заклеивают бакелитовым лаком между двумя слоями тонкой бумаги и подвергают термической обработке (рис. 4, а).
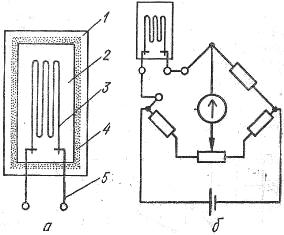
Рис. 4. Тензорезистор: а — схема устройства: 1 — деформируемая деталь, 2 — тонкая бумага, 3 — проволока, 4 — клей, 5 — выводы, б — схема включения в плечо неуравновешенного моста резисторов.
Изготовленный тензорезистор приклеивают к тщательно очищенной деформируемой детали очень тонким слоем изоляционного клея так, чтобы направление ожидаемой деформации детали совпало с направлением длинных сторон петель проволоки. При деформации тела приклеенный тензорезистор воспринимает эту же деформацию, что изменяет его электрическое сопротивление вследствие изменения размеров проволоки датчика, а также структуры ее материала, которая сказывается на удельном сопротивлении проволоки.
Поскольку относительное изменение сопротивления тензорезистора прямо пропорционально линейной деформации исследуемого тела, а следовательно, и механическим напряжениям внутренних сил упругости, то, пользуясь показаниями гальванометра измерительной диагонали предварительно уравновешенного моста резисторов, одним из плеч которого является тензорезистор, можно судить о значениях измеряемых механических величин (рис. 4, б).
Применение неуравновешенного моста резисторов требует стабилизации напряжения источника питания или применения в качестве электроизмерительного прибора магнитоэлектрического логометра, на показания которого изменение напряжения в пределах ±20 % номинального, указанного на шкале прибора, существенного влияния не оказывает.
Для измерения температуры различных сред применяют термочувствительные и термоэлектрические преобразователи . К термочувствительным преобразователям относятся металлические и полупроводниковые терморезисторы, сопротивление которых в значительной степени зависит от температуры (рис. 5, а).
Наибольшее распространение получили платиновые терморезисторы для измерения температуры в диапазоне от -260 до +1100 °С и медные терморезисторы — для интервала температур от -200 до +200 °С, а также полупроводниковые терморезисторы с отрицательным коэффициентом электрического сопротивления — термисторы, отличающиеся высокой чувствительностью и малыми размерами по сравнению с металлическими терморезисторами, для измерения температур от -60 до +120 °С.
Для защиты термочувствительных преобразователей от повреждений их помещают в тонкостенную стальную трубу с запаянным дном и устройством для присоединения выводов к проводам неуравновешенного моста резисторов (рис. 5, б), что позволяет по току измерительной диагонали судить об измеряемой температуре. Шкалу магнитоэлектрического логометра, используемого в качестве измерителя, градуируют в градусах Цельсия (°С).
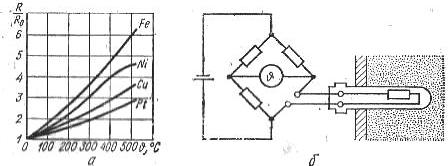
Рис. 5. Терморезисторы: а — графики зависимости изменения относительного сопротивления металлов от температуры, б — схема включения терморезисторов в плечо неуравновешенного моста резисторов.
Термоэлектрические преобразователи температуры — термопары , генерирующие небольшую э. д. с. под влиянием нагрева места соединения двух разнородных металлов, помещают в защитную пластмассовую, металлическую или фарфоровую оболочку в зоне измеряемых температур (рис. 6, а, б).
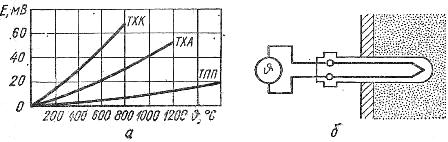
Рис. 6. Термопары: а — графики зависимости э. д. с. от температуры термопар: ТПП — платинородий-платиновой, ТХА — хромель-алюмелевой, ТХК-хромель-копелевой, б — схема установки для измерения температуры с помощью термопары.
Свободные концы термопары соединяют однородными проводниками с магнитоэлектрическим милливольтметром, шкала которого проградуирована в градусах Цельсия. Наибольшее распространение получили следующие термопары: платинородий — платиновая для измерения температур до 1300 °С и кратковременно до 1600 °С, хромель-алюмелевая для температур соответственно указанным режимам — 1000 °С и 1300 °С и хромель-копелевая, предназначенная для длительного измерения температур до 600 °С и кратковременного — до 800 °С.
Электрические методы измерения различных неэлектрических величин широко применяют в практике, поскольку они обеспечивают высокую точность измерений, отличаются широким диапазоном измеряемых величин, позволяют выполнять измерения и регистрацию их на значительном расстоянии от места расположения контролируемого объекта, а также дают возможность проводить измерения в труднодоступных местах.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети: