Зависимость скорости вращения от частоты

Зарегистрируйте новую учётную запись в нашем сообществе. Это очень просто!
Войти
Уже есть аккаунт? Войти в систему.
Подписчики 0
Последние посетители 0 пользователей онлайн
Ни одного зарегистрированного пользователя не просматривает данную страницу
- IPS Theme by IPSFocus
- Политика конфиденциальности
- Обратная связь
- Уже зарегистрированы? Войти
- Регистрация
Главная
Активность
- Создать.
Важная информация
Мы разместили cookie-файлы на ваше устройство, чтобы помочь сделать этот сайт лучше. Вы можете изменить свои настройки cookie-файлов, или продолжить без изменения настроек.
Самый экономичный способ управления двигателями – преобразователь частоты

В промышленности свыше 60% электроэнергии потребляется асинхронными электроприводами – в насосных, компрессорных, вентиляционных и других установках. Это наиболее простой, а потому дешевый и надежный тип двигателя.
Технологический процесс различных производств в промышленности требует гибкого изменения частоты вращения каких-либо исполнительных механизмов. Благодаря бурному развитию электронной и вычислительной техники, а также стремлению снизить потери электроэнергии появились устройства для экономного управления электродвигателями различного типа. В этой статье как раз и поговорим о том, как обеспечить максимально эффективное управление электроприводом. Работая в компании «Первый инженер» (группа компаний ЛАНИТ), я вижу, что наши заказчики всё больше внимания уделяют энергоэффективности
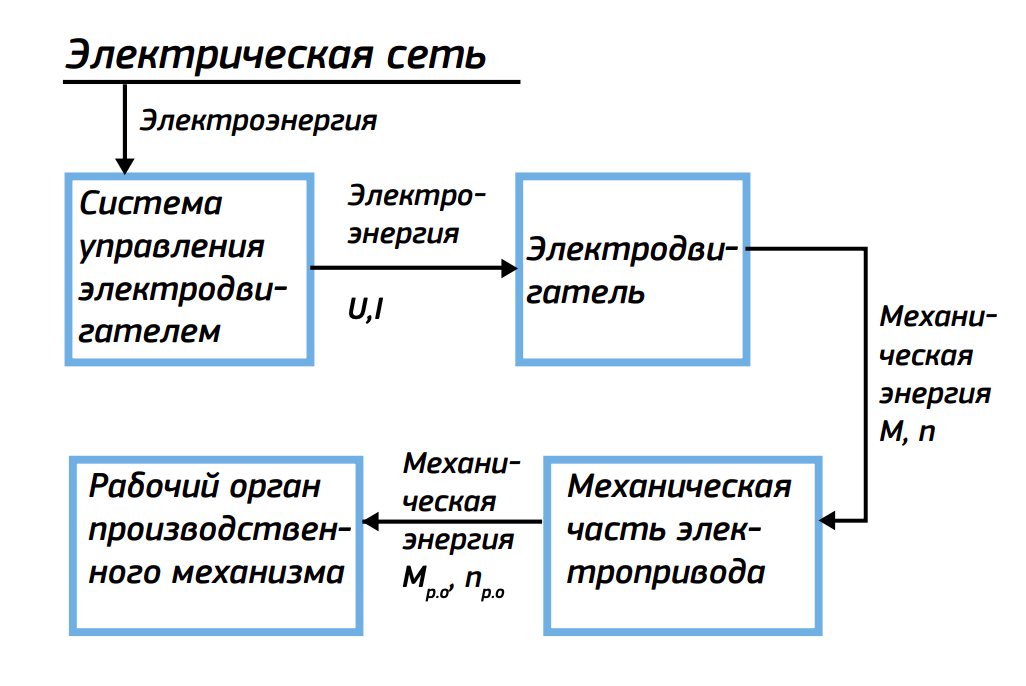
Большая часть электрической энергии, потребляемой производственными и технологическими установками, используется для выполнения какой-либо механической работы. Для приведения в движение рабочих органов различных производственных и технологических механизмов преимущественно используются асинхронные электрические двигатели с короткозамкнутым ротором (в дальнейшем именно о данном типе электродвигателя и будем вести повествование). Сам электродвигатель, его система управления и механическое устройство, передающее движение от вала двигателя к производственному механизму, образуют систему электрического привода.
Наличие минимальных потерь электроэнергии в обмотках за счет регулирования частоты вращения двигателя, возможность плавного пуска за счет равномерного увеличения частоты и напряжения — это основные постулаты эффективного управления электродвигателями.
Ведь ранее существовали и до сих пор существуют такие способы управления двигателем, как:
- реостатное регулирование частоты путем введения дополнительных активных сопротивлений в цепи обмоток двигателя, последовательно закорачиваемых контакторами;
- изменение напряжения на зажимах статора, при этом частота такого напряжения постоянна и равна частоте промышленной сети переменного тока;
- ступенчатое регулирование путем изменения числа пар полюсов статорной обмотки.
Потери неизбежны?
Остановимся более подробно на электрических потерях, возникающих в асинхронном электродвигателе.
Работа электрического привода характеризуется целым рядом электрических и механических величин.
К электрическим величинам относятся:
- напряжение сети,
- ток электродвигателя,
- магнитный поток,
- электродвижущая сила (ЭДС).
- частота вращения n (об/мин),
- вращающийся момент M (Н•м) двигателя,
- механическая мощность электродвигателя P (Вт), определяемая произведением момента на частоту вращения: P=(M•n)/(9,55).
при учете которой формула приобретает вид:
Зависимость вращающего момента двигателя M от частоты вращения его ротора n называется механической характеристикой электродвигателя. Отметим, что при работе асинхронной машины со статора на ротор передается через воздушный зазор с помощью электромагнитного поля так называемая электромагнитная мощность:
Часть этой мощности передается на вал ротора в виде механической мощности согласно выражению (2), а остальная часть выделяется в виде потерь в активных сопротивлениях всех трех фаз роторной цепи.
Эти потери, называемые электрическими, равны:
Таким образом, электрические потери определяются квадратом тока, проходящего по обмоткам.
Они в сильной степени определяются нагрузкой асинхронного двигателя. Все другие виды потерь, кроме электрических, изменяются с нагрузкой менее существенно.
Поэтому рассмотрим, как изменяются электрические потери асинхронного двигателя при регулировании частоты вращения.
Электрические потери непосредственно в обмотке ротора электродвигателя выделяются в виде тепла внутри машины и потому определяют ее нагрев. Очевидно, чем больше электрические потери в цепи ротора, тем меньше КПД двигателя, тем менее экономична его работа.
Учитывая, что потери в статоре примерно пропорциональны потерям в роторе, еще более понятно стремление уменьшить электрические потери в роторе. Тот способ регулирования частоты вращения двигателя является экономичным, при котором электрические потери в роторе относительно невелики.
Из анализа выражений следует, что самый экономичный способ управления двигателями заключается в частоте вращения ротора, близкой к синхронной.
Частотно-регулируемые приводы
В обиход различных сфер промышленности, которые используют насосное, вентиляционное оборудование, конвейерные установки, объекты генерации (ТЭЦ, ГРЭС и т.п.) и др. вошли такие установки, как частотно-регулируемые приводы (ЧРП), также называемые преобразователями частоты (ПЧ). Данные установки и позволяют изменять частоту и амплитуду трехфазного напряжения, поступающего на электродвигатель, за счет чего и достигается гибкое изменение режимов работы управляющих механизмов.

Высоковольтный частотно-регулируемый привод

Конструктив ЧРП
Приведем краткое описание существующих преобразователей частоты.
Конструктивно преобразователь состоит из функционально связанных блоков: блока входного трансформатора (шкаф трансформатора); многоуровневого инвертора (шкаф инвертора) и системы управления и защит с блоком ввода и отображения информации (шкаф управления и защит).
В шкафу входного трансформатора производится передача энергии от трехфазного источника питания входным многообмоточным трансформатором, который распределяет пониженное напряжение на многоуровневый инвертор.
Многоуровневый инвертор состоит из унифицированных ячеек – преобразователей. Количество ячеек определяется конкретным конструктивом и заводом-изготовителем. Каждая ячейка оснащена выпрямителем и фильтром звена постоянного тока с мостовым инвертором напряжения на современных IGBT транзисторах (биполярный транзистор с изолированным затвором). Первоначально выпрямляется входной переменный ток, а затем с помощью полупроводникового инвертора преобразуется в переменный ток с регулируемой частотой и напряжением.
Полученные источники управляемого переменного напряжения соединяются последовательно в звенья, формируя фазу напряжения. Построение выходной трехфазной системы питания асинхронного двигателя производится включением звеньев по схеме «ЗВЕЗДА».
Система управления защиты располагается в шкафу управления и защиты и представлена многофункциональным микропроцессорным блоком с системой питания от источника собственных нужд преобразователя, устройством ввода-вывода информации и первичными сенсорами электрических режимов работы преобразователя.
Потенциал экономии: считаем вместе
На основании данных, предоставленных компанией Mitsubishi Electric, оценим потенциал энергосбережения при внедрении преобразователей частоты.
Вначале посмотрим, как меняется мощность при различных режимах регулирования двигателя:
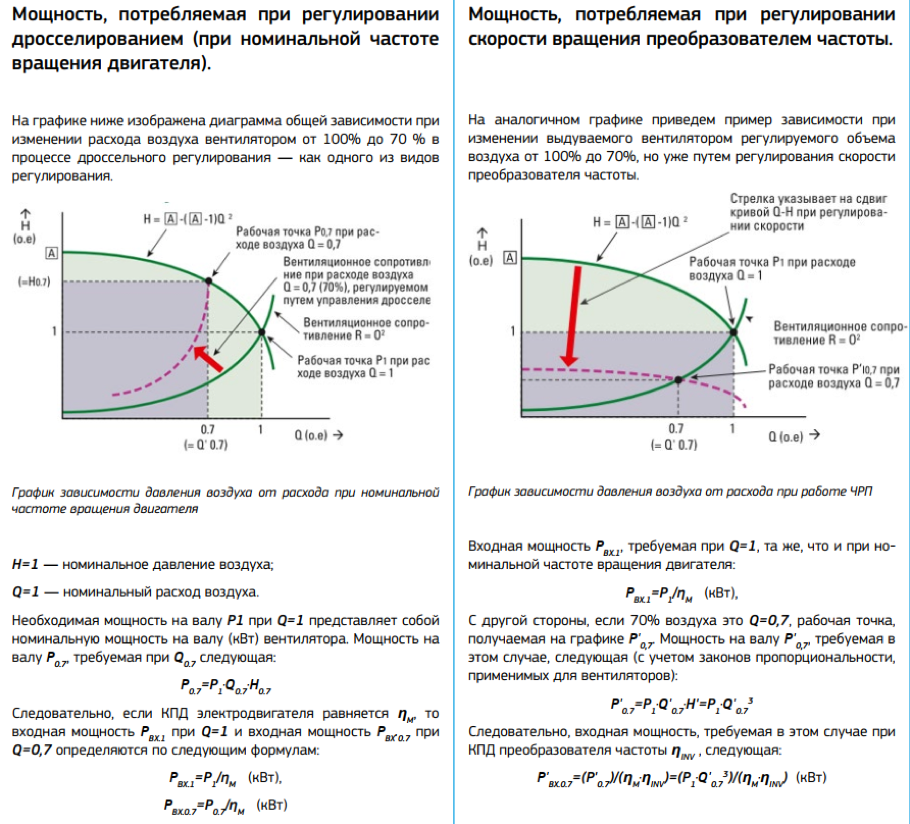
А теперь приведем пример расчета.
КПД электродвигателя: 96,5%;
КПД частотно-регулируемого привода: 97%;
Мощность на валу вентилятора при номинальном объеме: 1100 кВт;
Характеристика вентилятора: H=1,4 о.е. при Q=0;
Полное рабочее время за год: 8000 ч.
Режимы работы вентилятора согласно графику:

Из графика получаем следующие данные:
100% расхода воздуха – 20% времени работы за год;
70% расхода воздуха – 50% времени работы за год;
50% расхода воздуха – 30% времени работы за год.
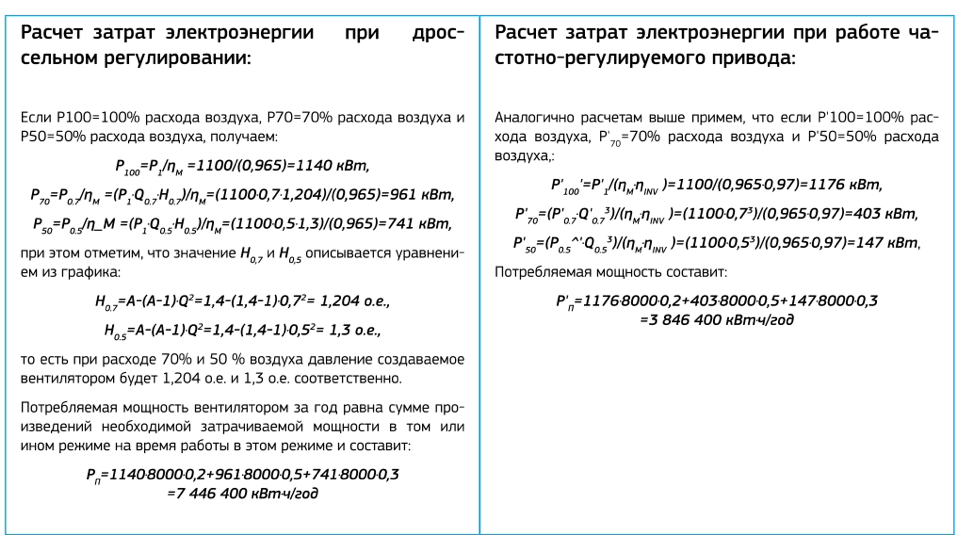
Экономия между работой под номинальной нагрузкой и работой с возможностью регулирования скорости вращения двигателя (работа совместно с ЧРП) равна:
7 446 400 кВт*ч/год — 3 846 400 кВт*ч/год= 3 600 000 кВт*ч/год
Учтем тариф на электроэнергию равным — 1 кВт*ч / 5,5 руб. Стоит отметить, что стоимость взята по первой ценовой категории и усредненному значению для одного из промышленных предприятий Приморского края за 2019 г.
Получим экономию в денежном выражении:
3 600 000 кВт*ч/год*5,5 руб/кВт*ч= 19 800 000 руб/год
Практика реализации подобных проектов позволяет с учетом затрат на эксплуатацию и ремонты, а также стоимости самих преобразователей частоты добиться срока окупаемости в 3 года.
Как показывают цифры, в экономической целесообразности внедрения ЧРП сомневаться не приходится. Однако одной экономикой эффект от их внедрения не ограничивается. ЧРП осуществляют плавный пуск двигателя, значительно уменьшая его износ, но об этом я расскажу в следующий раз.
У нас есть вакансии!
- Начальник ПТО (г. Химки)
- Заместитель технического директора по строительству (Руководитель по строительству) (г. Химки)
- Начальник участка (г. Уфа)
Механическая характеристика асинхронного двигателя
Прямая зависимость частоты, с которой вращается ротор асинхронного двигателя от полезного вращающего момента на валу является его механической характеристикой. Вращающий момент на валу двигателя определяется как сумма момента холостого хода и электромагнитного момента. Поскольку при нагрузке моментом холостого хода можно и вовсе пренебречь, включив его в момент тормозящий, то механическую характеристику можно представить как функцию зависимости частоты вращения от электромагнитного момента. Это должно пониматься следующим образом: чем больше нагрузка, тем меньше частота вращения асинхронного двигателя. Что можно изобразить графически приняв за оси координат соответственно частоту и электромагнитный момент двигателя.
Если параметры асинхронного электродвигателя находятся в норме, обусловленной паспортными характеристиками (сюда относится в первую очередь питающее напряжение), а схема включения также соответствует основной паспортной, то при нулевом внешнем сопротивлении в цепи ротора мы будем иметь дело с естественной механической характеристикой.
Можно получить искусственные механические характеристики. Для этого, например, можно дополнительно включить резистор в цепь статора или цепь ротора. При этом, чем больше подключаемое сопротивление, тем до меньшего значения сможет развиться критический момент двигателя. Если изменить питающее напряжение, то механические характеристики асинхронного электродвигателя также будут отличаться от естественных.
Знание и умение пользоваться механическими характеристиками является крайне важным и полезным инструментом при исследовании динамического и статического режима работы электропривода.
Зависимость скольжения, мощности и вращающего момента асинхронных машин от частоты сети при переходном режиме работы Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
Аннотация научной статьи по электротехнике, электронной технике, информационным технологиям, автор научной работы — Бекиров Э.А., Воскресенская С.Н., Абибуллаев А.Н.
Проведен анализ изменения скольжения и вращающего момента асинхронных двигателей при изменении частоты питающей сети. Для асинхронных машин приведены выражения для расчета активной и реактивной мощностей . Уменьшение частоты ведет к уменьшению рабочего скольжения и к росту суммарной реактивной мощности и вращающего электромагнитного момента. Показаны расчетные и экспериментальные данные колебания и биения напряжения в сети при изменении частоты . Также рассмотрено влияние величины скольжения на электромагнитный вращающий момент.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Похожие темы научных работ по электротехнике, электронной технике, информационным технологиям , автор научной работы — Бекиров Э.А., Воскресенская С.Н., Абибуллаев А.Н.
Исследование магнитной системы асинхронного двигателя при частотном управлении
Анализ влияния параметров напряжения сети на работу асинхронных машин
Оптимальное управление токами трехфазного асинхронного двигателя
Выбор способа регулирования тягового асинхронного электродвигателя трактора и построение механической характеристики
Исследование процессов динамического нагружения электрических машин при неисправностях в обмотке статора
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
i Надоели баннеры? Вы всегда можете отключить рекламу.
DEPENDENCE OF SLIDING, POWER, AND ROTATING MOMENT OF ASYNCHRONOUS MACHINES FROM THE NETWORK FREQUENCY IN TRANSITION MODE OF OPERATION
The analysis of the sliding and rotating moment changes of asynchronous motors at the change of the supply network frequency is carried out. For asynchronous machines, expressions for the calculation of active and reactive power are given. The decrease in frequency leads to a decrease in the working sliding and to an increase in the total reactive power and rotating moment . The calculated and experimental data of the voltage fluctuation and beating in the network at the frequency change are shown. The effect of the sliding magnitude on the electromagnetic rotating moment is also considered.
Текст научной работы на тему «Зависимость скольжения, мощности и вращающего момента асинхронных машин от частоты сети при переходном режиме работы»
УДК 621.313.333: 621.317.3
ЗАВИСИМОСТЬ СКОЛЬЖЕНИЯ, МОЩНОСТИ И ВРАЩАЮЩЕГО МОМЕНТА АСИНХРОННЫХ МАШИН ОТ ЧАСТОТЫ СЕТИ ПРИ ПЕРЕХОДНОМ РЕЖИМЕ РАБОТЫ
Бекиров Э.А., Воскресенская С.Н., Абибуллаев А.Н.
Физико-технический институт ФГАОУ ВО «КФУ им. В. И. Вернадского»
Симферополь, ул. Киевская, 181, е-mail: kaf_energo@cfuv.ru
Аннотация. Проведен анализ изменения скольжения и вращающего момента асинхронных двигателей при изменении частоты питающей сети. Для асинхронных машин приведены выражения для расчета активной и реактивной мощностей. Уменьшение частоты ведет к уменьшению рабочего скольжения и к росту суммарной реактивной мощности и вращающего электромагнитного момента. Показаны расчетные и экспериментальные данные колебания и биения напряжения в сети при изменении частоты. Также рассмотрено влияние величины скольжения на электромагнитный вращающий момент.
Ключевые слова: асинхронная машина, скольжение, вращающий момент, частота, мощность.
Одним из главных условий обеспечения нормальной работы электродвигателей является питание их электроэнергией, параметры которой соответствуют определенным требованиям к ее качеству.
Основные показатели качества электроэнергии (ПКЭ) связаны с такими параметрами, как отклонения частоты и напряжения, колебания напряжения, несинусоидальность и несимметрия напряжения [1]. Напряжение сети, в свою очередь, зависит от реактивной мощности [2, 3] и при ее нехватке возникает необходимость в дополнительном регулировании. Изменение ПКЭ сети приводит к протеканию переходных процессов в асинхронных машинах, которые используются как для генерации электроэнергии, так и в качестве потребителей [4 — 6].
Во избежание длительного нарушения нормальной работы электродвигателей основные ПКЭ не должны выходить за пределы своих нормальных значений, а в послеаварийных режимах — за пределы определенных максимальных значений.
При протекании переходных процессов в энергосети существенно могут меняться ПКЭ.
Жесткие требования стандарта к отклонениям частоты питающего напряжения обусловлены ее значительным влиянием на режимы работы электрооборудования, ход технологических процессов производства и, как следствие, технико-экономические показатели работы промышленных предприятий. То есть, предприятия терпят убытки, которые могут быть выражены в виде двух составляющих:
— Электромагнитная составляющая ущерба (уменьшение электромагнитной индукции и выработки двигателей) обусловлена увеличением потерь активной мощности в электрических сетях и ростом потребления активной и реактивной мощностей. Известно, что снижение частоты на 1% увеличивает потери в электрических сетях на 2% [7].
— Технологическая составляющая ущерба вызвана в основном недовыпуском промышленными предприятиями своей продукции и стоимостью дополнительного времени работы предприятия для выполнения задания.
Согласно экспертным оценкам значение технологического ущерба на порядок выше электромагнитного. Оборудование любого предприятия должно работать в режиме, способствующем энергосбережению [8 — 10].
Отклонения частоты отрицательно влияют на работу электронной техники: изменение на величину более +0,1 Гц приводит к яркостным геометрическим фоновым искажениям
телевизионного изображения; если ее значение лежит в диапазоне от 49,9 до 49,5 Гц, это влечет за собой почти четырехкратное увеличение допустимого размаха телевизионного сигнала по сравнению со значением новой помехи [11].
Пониженная частота электрической сети влияет на срок службы оборудования, содержащего элементы со сталью (электродвигатели, трансформаторы, реакторы со стальным магнитопроводом), за счет увеличения тока намагничивания в таких аппаратах и дополнительного нагрева стальных сердечников. Например, отклонение частоты влияет на надежность и долговечность работы электродвигателей, а также на их тепловой режим. Кроме того, для асинхронных и синхронных двигателей тепловой режим зависит не только от величины напряжения, но и от степени загрузки.
Анализ работы предприятий с непрерывным циклом производства показал, что большинство основных технологических линий оборудовано механизмами с постоянными и вентиляторными моментами сопротивлений, а их приводами служат асинхронные двигатели. Частота вращения роторов двигателей пропорциональна изменению частоты сети, а производительность технологических линий зависит от частоты вращения двигателя. В связи с этим целесообразно выявить ее влияние на момент и мощность.
Наиболее чувствительны к понижению частоты двигатели собственных нужд электростанций. Результатом такого изменения параметров сети является уменьшение их производительности, что сопровождается снижением располагаемой мощности генераторов и частоты (имеет место лавина частоты) из-за дальнейшего дефицита активной мощности.
Такие электропотребители, как лампы
накаливания, печи сопротивления, дуговые
электрические печи на колебание частоты практически не реагируют.
МАТЕРИАЛЫ И МЕТОДЫ ИССЛЕДОВАНИЙ
Целью исследования является анализ параметров асинхронных машин при отклонении частоты сети от номинального значения. Задачи
включают: получение зависимостей скорости изменения скольжения и вращающего момента двигателя от частоты; анализ изменения мощности; рассмотрение случаев возникновения колебаний и биений напряжения в энергосистемах при отклонении частоты.
Используемые методы исследований: математический анализ, составление
дифференциальных уравнений, экспериментальные измерения параметров и графические построения.
РЕЗУЛЬТАТЫ И ИХ АНАЛИЗ
Изменение частоты электроэнергии при неизменном напряжении U1 = иноы = const для питания асинхронного электродвигателя приводит к изменению потока Фт и соответствующему изменению тока ротора I2 и нагрузочной составляющей тока статора.
Если принять U1 « Е1, то э.д.с. обмотки статора определяется по формуле [11]
где /1 — частота питания электродвигателя;
w1 — число витков обмотки статора;
Коб1 — обмоточный коэффициент для обмотки статора;
Фт — магнитный поток.
Из выражения (1) получим
Из формулы электромагнитного момента двигателя очевидна связь между значением момента и физическими явлениями, происходящими в двигателе [11]:
М = См^Фт^12 •cosW2 ,
где — сдвиг по фазе между э.д.с. и током ротора;
См = —— магнитная постоянная;
р — число пар полюсов; т2 — число фаз в обмотке ротора; Коб2 — обмоточный коэффициент для обмотки ротора;
/2 — ток ротора. Из формулы (3) имеем
При уменьшении частоты магнитный поток и ток холостого хода 10 увеличиваются, причем ток 10 из-за насыщения стали магнитопровода возрастает быстрее, чем магнитный поток. Уменьшение частоты / на 10% вызывает увеличение тока 10 на 20-30%. Ток 10 является практически реактивным, это приводит к снижению коэффициента мощности двигателя. С увеличением частоты / пропорционально возрастает частота вращения. Магнитный поток Фм уменьшается обратно пропорционально частоте. Согласно формуле (4) это приводит к резкому увеличению тока 12. При неизменном нагрузочном моменте увеличение частоты повышает опасность нарушения устойчивости двигателя, так как снижается максимальный момент двигателя пропорционально квадрату частоты /2.
Характеристики асинхронного двигателя при частотах питающего напряжения, отличающихся от номинального значения, зависят от соотношения между напряжением сети и частотой /1.
Зависимость максимального момента от напряжения и частоты выражается формулой
где ш1 — число фаз в обмотке статора;
угловая частота вращения магнитного поля
С1 — коэффициент, равный У1/Е1;
71 — активное сопротивление обмотки статора;
— реактивное сопротивление обмотки
х2 — реактивное сопротивление обмотки ротора в схеме замещения асинхронного двигателя.
При Сх=1 (для упрощенной схемы замещения с вынесенным получаем
а пренебрегая величиной 71 ввиду его малого значения, имеем