2.4. Характеристика системы двухпозиционного регулирования температуры
Объект регулирования и автоматический регулятор составляет вместе систему автоматического регулирования (рис. 4).
Объектом регулирования (ОР) в настоящей работе служит электрическая печь. Нагрев печи осуществляется при помощи нагревательных приборов (сопротивления), питаемых переменным током.

Рис. 4 . Структурная схема системы регулирования температуры
электрической печи : ОР – объект регулирования; ЧЭ – чувствительный
элемент (ТЭП); ИП – измерительный прибор; МП – магнитный пускатель
Регулируемым параметром в объекте является температура воздуха в рабочем пространстве печи.
Чувствительным элементом (ЧЭ) является термоэлектрический преобразователь (гр.ХА), горячий спай которого помещен в рабочем пространстве печи. Максимальная температура термоэлектрического преобразователя при длительном применении 900 0 С.
Измерительным прибором (ИП) служит автоматический потенциометр.
Для осуществления позиционного регулирования в одноточечные приборы встраиваются отдельные блоки с двумя микропереключателями В1 и В2, имеющими указатели задачи (уставки) их положения. Принципиальные электрические схемы устройства для осуществления позиционного регулирования представлены на рисунке 5. В зависимости от модификации прибора микропереключатели могут включаться по схеме с общим контактом (рис. 5а) и с раздельными цепями (рис.5б). Диаграмма работы микропереключателей показана на рисунке 5в.

Рис. 5. Принципиальные электрические схемы устройства позиционного
регулирования приборов серии КС
В зависимости от настройки приборы могут осуществлять двух или трехпозиционное регулирование. Для двухпозиционного регулирования оба указателя задачи устанавливают вместе против отметки шкалы прибора, соответствующей заданному значению параметра.
Микропереключатели переключаются кареткой указателя значения параметра, например температуры при перемешивании его реверсивным электродвигателем М1 при разбалансе измерительного моста прибора. Так как переключение двухпозиционного устройства механическое, то его зона неоднозначности практически равна нулю и статическая характеристика имеет вид, соответствующий на рисунке 6а.

Рис. 6. Статические характеристики позиционного регулятора:
а) статическая характеристика с зоной неоднозначности
двухпозиционного регулятора; б) статическая характеристика
трехпозиционного регулятора с зонами неоднозначности
Для осуществления трехпозиционного регулирования микропереключатель В1 с указателем «Мало» устанавливается на отметке шкалы, соответствующей нижней отметке диапазона шкалы «Норма». Микропереключатель В1 замкнут при показаниях прибора меньше уставки «Мало» и разомкнут при показаниях прибора больше уставки «Мало». Переключатель В2 разомкнут при показаниях прибора меньше уставки «Много» и замкнут при показаниях прибора больше уставки «Много».
Таким образом, в диапазоне «Норма» оба микропереключателя В1 и В2 разомкнуты. Такой порядок работы микропереключателей позволяет обеспечить трехпозиционное регулирование со статической характеристикой, соответствующей рисунку 6в.
2.5. Взаимодействие элементов системы прерывистого регулирования температуры
Рассмотрим схему электрических соединений стенда системы автоматического позиционного регулирования температуры (рис. 7).

Рис.7. Схема электрических соединений стенда системы автоматического
Допустим, что в данный момент времени температура в печи выше заданной. Контакт К1, находящийся в потенциометре КСП разомкнут. Магнитный пускатель КМ обесточен. Замыкающий контакт КМ2 обесточивает нагревательный элемент печи ЭП и сигнальную лампу EL2 (красный цвет). Размыкающий контакт КМ1 подключит к питанию лампу EL3 (зеленый цвет), которая сигнализирует об отключении нагревателя печи. Печь охлаждается.
При уменьшении температуры в печи и достижения ею заданной величины контакт К1 замыкается, подключая к сети обмотку магнитного пускателя КМ. Включаясь, магнитный пускатель своим замыкающим контактом КМ2 замыкает цепь нагревательного элемента печи и цепь сигнальной лампы EL2. Размыкающий контакт КМ1 магнитного пускателя КМ отключает сигнальную лампу EL3. Печь нагревается, о чем свидетельствует сигнальная лампа EL2. Некоторое время слой воздуха, находящийся между нагревательным элементом и спаем термоэлектрического преобразователя будет охлаждаться за счет кожуха термоэлектрического преобразователя. Несмотря на то, что нагреватель печи уже греет печь, реверсивный двигатель потенциометра будет еще некоторое время перемещать стрелку в сторону уменьшения температуры.
При достижении температурой значения больше заданного, контакт К1 размыкается, что приводит к отключению ЭП. Таким образом, осуществляется повторение цикла регулирования температуры в ЭП в заданном диапазоне.
Заданное значение температуры устанавливается при помощи ручки «Уставки значения». Конец указателя задания устанавливается по направлению к точке, в которой должно быть перо при достижении измеряемой температуры заданного значения.
2.6. Расчет амплитуды и частоты колебаний температуры в системе двухпозиционного регулирования температуры
Рассматриваемая система автоматического регулирования является автоколебательной. Это означает, что при работе системы в ней возникает устойчивый автоколебательный процесс изменения температуры объекта. Этот процесс представляет собой устойчивый режим работы данной системы.
Появление автоколебаний в системе вызвано наличием релейных элементов в регуляторе. Дополнительное отклонение регулируемого параметра от заданного значения обуславливается также наличием инерции объекта регулирования (печи).
Автоколебательный процесс характеризуется амплитудой и частотой колебаний. Последние подбираются так, чтобы они были практически приемлемы для данного технологического процесса, если автоколебания в последнем вообще допустимы.
Для определения амплитуды колебаний температуры в печи необходимо найти разность между ее максимальным и минимальным значением (рис. 8).

, (1)
где А – амплитуда колебаний.
Частота колебаний находится по их периоду

, (2)

где — частота колебаний (Гц);
Т – период колебаний (с).

Рис.8 . Автоколебательный процесс изменения температуры в печи :
Т – период колебания; А – амплитуда колебания; tзад – заданное значение
I.5. Пропорционально-интегрально-дифференциальные регуляторы
Пропорционально-интегрально-дифференциальные регуляторы могут быть сконструированы по структурной схеме идеального ПИД-регулятора. Так как фактическая реализация идеального дифференцирующего звена в общем случае представляет большие трудности, то в практических схемах используется реальное дифференцирующее звено Wд(р)=kД ТДр/( ТДр+1). Для уменьшения погрешности в реализации закона ПИД-регулирования исполнительный механизм, как и в случае реализации закона ПИ-регулирования по схеме рис. 3, а, охватывается отрицательной обратной связью с передаточной функцией Wo.c(p) =kо.с. С учетом этого структурная схема такого реального ПИД-регулятора имеет вид, представленный на рис. 4, a.
Передаточная функция регулятора


При соблюдении условия (1.11) приближенную передаточную функцию (2) можно
записать в виде
Wр(p) = kp + 1/(Ти р) + kдTд р/(Tдр + 1) (2.1)
Параметрами настройки ПИД-регулятора являются kp, Ти, kд и Тд..

Рис. 5. Характер реализации закона ПИД-регулирования регулятором со структурной схемой, приведенной на рис. 3,11.
Для практической реализации закона ПИД-регулирования применяются или ПИД-регуляторы (рис. 5, а и б) или ПИ-регуляторы (рис. 3,а и б) в комплекте с дифференциаторами Wд(р)=kД ТДр/( ТДр+1).
На рис.5,в представлена структурная схема, в которой закон ПИД-регулирования реализуется за счет динамических свойств канала обратной связи, охватывающего как усилительную, так и исполнительную часть регулятора.
Для реализации ПИД-регулятора со структурной схемой, приведенной на рис. 5, необходимо, чтобы канал обратной связи состоял из последовательно включенных апериодического и реального дифференцирующею звеньев.
Так как условие (1.11) в структурной схеме на рис. 5,в реализуется приближенно, то исполнительный механизм вносит искажения в закон ПИД-регулирования. Фактическая реакция регулятора на ступенчатое входное воздействие имеет вид кривой 1. на рис. 6 при идеальной реакции ПИД-регулятора, представленной прямыми 2.

Рис. 6. Характер реализации закона ПИД-регулирования
регулятором со структурной схемой, приведенной на рис. 3,а .
Таким образом, реальные ПИД-регуляторы со структурными схемами на рис. 5 реализуют законы ПИД-регулирования с погрешностью, зависящей от степени соблюдения условия (1.11) и параметров настройки дифференцирующей части в схемах на рис. 5,аиб.
Следует отметить, что промышленные ПИД-регуляторы со структурными схемами на рис. 5, а и б могут реализовать различные законы регулирования с любым сочетанием из П-, И- и Д-составляющих закона ПИД-регулирования.
I.6. Позиционные регуляторы.
Позиционные регуляторы работают по принципу «включено-выключено». Их реализация осуществляется, например, с помощью контактных и бесконтактных релейных элементов.
Позиционные регуляторы бывают двух-, трех- и многопозиционными.

На рис. 7 приведены структурная схема и статические характеристики двухпозиционных регуляторов. Двухпозиционные регуляторы настраиваются таким образом, чтобы значенияиотсчитывались в приращениях от условного равновесного состояния объекта регулирования, соответствующего расчетным значениям0и0, принятым за начало отсчета. При этом статическая характеристика двухпозиционного регулятора без зоны нечувствительности примет вид, представленный на рис. 7б,с зоной нечувствительности–на рис. 7в.
Рис.7. Структурная схема (а) и статические характеристики без зоны нечувствительности (б) и с зоной нечувствительности (в) двух позиционного регулятора; ДР — двухпозиционный регулятор.
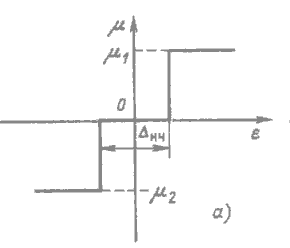
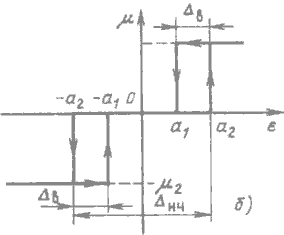
Рис. 8. Статические характеристики трехпозиционных регуляторов без зон нечувствительности (а) и с зонами нечувствительности (б).
Аналитическая статическая характеристика двухпозиционного регулятора без зоны нечувствительности запишется в виде:
а с зоной нечувствительности–в виде
Из (2.2) и (2.3), а также из рис. 7, б и в следует, что двухпозиционные регуляторы постоянно оказывают на объект регулирования воздействия, отличные от их значений, необходимых для равновесного состояния системы (при =0). В результате этого автоматическая система с двухпозиционным регулятором будет работать в автоколебательном режиме в окрестностях ее равновесного состояния.
На рис.9 дан пример структурной схемы многопозиционного регулятора и его статических характеристик без зон неоднозначности и с зонами неоднозначности.
Из структурной схемы на рис.9, а многопозиционного регулятора следует, что его можно представить как несколько двухпозиционных регуляторов с различными установками их срабатывания, соединенными последовательно.
Отклонение регулируемой величины от заданного значения ε поступает на входы всех двухпозиционных регуляторов. Основной двухпозиционный регулятор ДРо срабатывает при изменении знака ε. Например, при ε > 0 регулятор ДРо срабатывает и на его выходе появляется регулирующий сигнал μо. Если этого регулирующего воздействия оказывается недостаточно и отклонение продолжает возрастать, то при ε Δg1>0 срабатывает регулятор ДР1б и на выходе многопозиционного регулятора появляется дополнительное регулирующее воздействие μ1б. Результирующее воздействие на выходе будет равно μ=μо+μ1Б. В общем случае таких дополнительных регуляторов может быть несколько и при возрастании ε результирующее регулирующее воздействие может быть равно
где n – число двухпозиционных регуляторов ДРIБ, включившихся при возрастании ε.
Если при очередном включении i-го двухпозиционного регулятора отклонение ε начнет уменьшаться, то регуляторы поочередно в обратной последовательности начнут отключаться.
Аналогично работает многопозиционный регулятор при отклонении ε в обратную сторону, т.е. при ε
Результирующее воздействие многопозиционного регулятора при этом будет равно
где m – число двухпозиционных регуляторов ДРjM, включившихся при уменьшении ε в сторону ε
Статическая характеристика многопозиционного регулятора без зон нечувствительности составляющих двухпозиционных регуляторов представлена на рис.9,б, а при наличии зон неоднозначности – на рис.9,в.
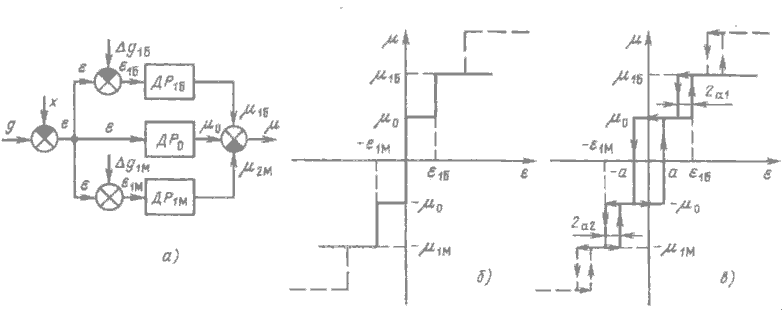
Рис. 9. Пример структурной схемы (а) и статических характеристик без зон неоднозначности (б) и с зонами неоднозначности (в) многопозиционного регулятора
I.7. Автоматические регуляторы прямого действия.
В регуляторах прямого действия воздействие регулируемой величины на первичный измерительный преобразователь регулятора служит источником энергии как для формирования закона регулирования, так и для перемещения регулирующего органа. К этим регуляторам энергия извне не подводится. Автоматические регуляторы получили широкое распространение в системах стабилизации давления, расхода, уровня, температуры и т. д.
В качестве примера на рис.10 представлен автоматический регулятор давления прямого действия, поддерживающий заданное значение давления среды в трубопроводе после регулирующего клапана, т. е. «после себя».
Регулятор выполнен в виде клапана с мембранным приводом. На мембрану 1 воздействуют давление измеряемой среды и противодействующая пружина 2.
При заданном значении давления условие равновесия сил, воздействующих на мембрану, запишется в виде

(2.4)
где р — заданное значение давления в трубопроводе; fм — эффективная площадь мембраны 1; с—жесткость пружины 2; l—перемещение клапана 5, жестко соединенного штоком 4 с мембраной 1.
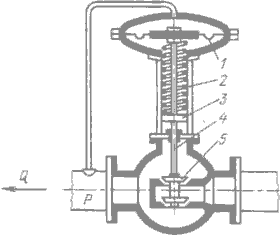
Рис. 10. Автоматический регулятор давления прямого действия.
Если давление р увеличится на значение Δр, например, в результате расхода среды Q потребителем, то мембрана 1 прогнется вниз, перемещая клапан на расстояние Δl, при котором сила сжатия пружины уравновесит возросшее давление среды на мембрану.
Новое условие равновесия сил на мембране запишется в виде (р+Δр)fм=с(l+ Δl) или Δрfм=с Δl, откуда Δl= Δрfм/с (2.6)
Таким образом, в приращениях от заданного равновесного состояния, регулятор прямого действия, приведенный на рис. 10, формирует пропорциональный закон регулирования
μ=kрε (2.7), где ε=Δр=рε–входная величина, равная отклонению давления от заданного значения; μ= Δl–выходная величина, равная равная приращению перемещения клапана; kр= fм/с–коэффициент передачи регулятора.
Заданное значение давления (регулируемой величины) устанавливается изменением натяжения пружины 2 (меняется жесткость с пружины) путем вращения натяжной гайки 3.
Регуляторы давления.
Автоматические регуляторы давления предназначаются для поддержания или изменения по определенному закону давления воздуха, газов, жидкостей в различных устройствах. В зависимости от конкретных эксплуатационных условий к таким регуляторам предъявляются различные требования, основными из которых являются точность, надежность, простота настройки и широкий диапазон регулирования. Кроме того, такие регуляторы не должны нарушать герметичность агрегатов, в которых они применяются, и должны обеспечивать пожаровзрывоопасность при работе в газовых и других агрессивных средах.
Функциональная схема одного из возможных регуляторов давления представлена на рис.11 и включает в себя задающую часть в виде в виде напряжения U0, элемент сравнения, усилительно-преобразовательное устройство, исполнительный двигатель Дв, регулирующий клапан РК, связанный с валом исполнительного двигателя через редуктор и шток с червячной передачей, объект регулирования ОР (например, котел или часть трубопровода), а также датчик давления ДД, являющийся датчиком обратной связи.
Исполнительный двигатель приоткрывает регулирующий клапан РК, если давление Ркв котле превышает требуемое значение, и, наоборот, закрывает клапан, когда давление в котле падает. Таким образом, автоматический регулятор поддерживает заданное значение Ркв объекте регулирования. При необходимости можно осуществить регулирование давления по заранее заданному закону.
Датчики давления в регуляторах, подобных приведенному на рис.11, используются для измерения действительного значения давления воздуха, газа или жидкости в объекте регулирования. Точность и надежность АР давления во многом определяются свойствами датчика давления.

Для измерения давления известны различные методы, однако наиболее широко применяется пружинный метод, основанный на зависимости деформации упругого чувствительного элемента от приложенного давления. Чувствительным элементом могут служить плоские или гофрированные мембраны, сильфоны и т.д.
В результате действия сил измеряемого давления Р происходит деформация и перемещение упругих чувствительных элементов, в данном случае жесткого центра 2 мембранной коробки 1, которое в свою очередь с помощью простейшего устройства 3 может быть преобразовано в угловое перемещение. Чаще всего для преобразования углового или линейного перемещения в электрический сигнал используются потенциометрические или индукционные преобразователи.
Устройства типа показанного на рис.12 , измеряющие положительные избыточные давления, называются манометрами.

Передаточная функция нескорректированного АР давления, представленного на рис11 , в упрощенном виде записывается как
где То–постоянная времени объекта регулирования;–временное запаздывание в объекте регулирования.
Позиционные регуляторы и двухпозицонное регулирование
В объектах регулирования, не обладающих самовыравниванием, любое возмущающее воздействие не может быть локализовано без помощи автоматического регулятора, и состояние равновесия не будет достигнуто.
Работа автоматического регулятора определяется видом зависимости между отклонениями регулируемого параметра и регулирующим воздействием регулирующего органа, происходящим в результате его перемещения. Эта зависимость называется динамической характеристикой регулятора или законом регулирования регулятора . По виду этой зависимости регуляторы делятся на позиционные, статические или пропорциональные, астатические и изодромные.

Регулирующий орган в позиционном регуляторе может иметь два или несколько фиксированных положений, каждое из которых соответствует определенным значениям регулируемого параметра.
По количеству позиций регуляторы могут быть двухпозиционные, трехпозиционные и многопозиционные.
В практике наибольшее применение находят двухпозиционные регуляторы . О них и следует говорить более подробно.
В двухпозиционном регуляторе при отклонении регулируемого параметра от заданного значения (на величину большую, чем нечувствительность регулятора) регулирующий орган занимает одно из крайних положений, соответствующих максимальному или минимальному возможному притоку регулирующего вещества. В частном случае минимальное значение может быть и нулем притока.
Передвижение регулирующего органа из одного крайнего положения в другое при двухпозиционном регулировании обычно совершается с большой скоростью — теоретически мгновенно за момент времени, равный нулю.
Равенство между притоком и стоком при заданном значении регулируемого параметра не наблюдается. Оно может наступить только лишь при максимальной или минимальной нагрузках. Поэтому при двухпозиционном регулировании система находится, как правило, в неравновесном состоянии. В силу этого регулируемый параметр непрерывно колеблется в обе стороны от заданного значения.
Амплитуда этих колебаний при отсутствии запаздываний, как нетрудно предположить, будет определяться нечувствительностью регулятора . Зона возможных колебаний регулируемого параметра зависит от зоны нечувствительности регулятора и ею определяется, если предположить, что запаздывания отсутствуют.
Зоной нечувствительности регулятора называется диапазон изменения регулируемого параметра, требуемый для начала трогания регулирующего органа в прямом и обратном, направлениях. Так, например, если регулятор температуры воздуха в помещении, настроенный на поддержание 20° С, начинает закрывать регулирующий орган на подводе горячей воды к нагревательному прибору при повышении температуры внутреннего воздуха до 21°, а открывать его при температуре 19°, то зона нечувствительности данного регулятора равна 2°.
Точность поддержания заданных параметров при двухпозиционном регулировании сравнительно высокая.
Если же точность регулирования достаточно высокая, то, казалось бы, двухпозиционные регуляторы можно применять на всех объектах. Однако применимость двухпозиционного регулирования в большинстве случаев определяется не достигаемой точностью регулирования, а допустимой частотой переключений. Нужно иметь в виду, что частые переключения приводят к быстрому износу деталей (очень часто контактов) регулятора, а следовательно, к уменьшению надежности его работы.
Наличие запаздывания ухудшает процесс регулирования, так как увеличивает амплитуду колебаний параметра, но с другой стороны, запаздывание уменьшает частоту переключений и этим как бы расширяет область применения двухпозиционного регулирования.
Принципиальная схема электрического двухпозиционного регулятора температуры в сушильном шкафу изображена на рис. 1.
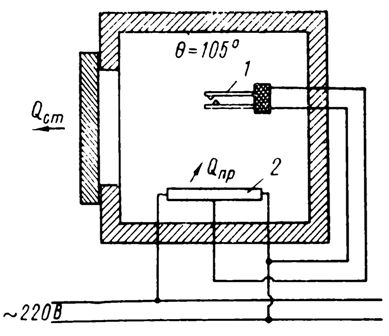
Рис. 1. Принципиальная схема электрического двухпозиционного регулятора температуры в сушильном шкафу: 1 — биметаллический датчик; 2 — нагревательный электрический элемент
Этот регулятор состоит из датчика 1 и нагревательного электрического элемента 2. Датчик состоит из двух биметаллических пластин с контактами, которые под действием температуры могут, приближаясь друг к другу, замыкать или, наоборот, размыкать электрическую цепь.
Обычно в сушильном шкафу поддерживается температура 105° С. Тогда при достижении указанной температуры контакты должны замкнуться и часть нагревательного элемента шунтируется. Необходимая величина Qпp после шунтирования нагревателя может быть подобрана с таким расчетом, чтобы полностью компенсировать потери тепла сушильным шкафом Qcт.
Но можно регулировать и таким образом, чтобы при достижении заданной температуры полностью выключать нагреватель. В первом варианте можно добиться того, что Qпp = Qcт, тогда регулятор не будет переключаться.
На рис. 2 изображена характеристика процесса двухпозиционного регулирования. На этом рисунке показаны изменения регулируемого параметра во времени после однократного скачкообразного изменения нагрузки на объект Qпp или Qст. Здесь же показаны перемещения регулирующего органа во времени.
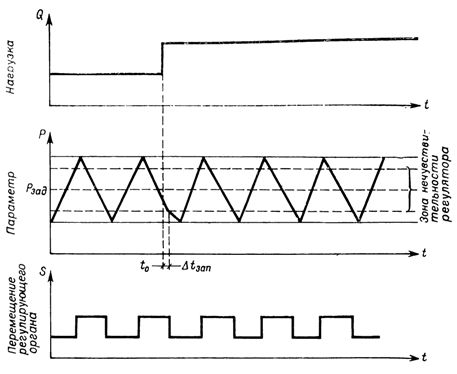
Рис. 2. Характеристика процесса двухпозиционного регулирования
Надо заметить, что при двухпозиционном регулировании изменение нагрузки вызывает смещение среднего значения регулируемой величины, т. е. оно характеризуется некоторой неравномерностью. Отклонение от среднего значения регулируемого параметра может быть подсчитано по формуле
dP см = (d t зап/ W)( Qпp /2 — Qcт ) ,
где d P см — максимальное смещение регулируемого параметра от среднего заданного значения; d t зап — время передаточного запаздывания; W — коэффициент емкости объекта.
В обычных случаях Qпp = Qcт и d t зап — величина незначительная. Поэтому смещение не может быть весьма существенным и не выходит за границу зоны нечувствительности регулятора.
Области применения двухпозиционных регуляторов
Двухпозиционный регулятор можно применять в том случае, когда степень самовыравнивания объекта регулирования близка к единице и чувствительность объекта к возмущениям не превышает 0,0005 1/с, если нет других причин, заставляющих отказаться от этого регулятора. К таким причинам следует отнести:
1. Частые, меньше чем через 4 — 5 мин, включения и выключения регулятора, которые обычно имеют место в объектах с небольшими коэффициентами емкости и при частых изменениях нагрузок на объект.
Нужно иметь в виду, что допустимая частота переключений определяется техническим совершенством регуляторов на данном уровне. Эти цифры устанавливаются из практики работы системы автоматического регулирвания. В дальнейшем, возможно, они могут быть уточнены, главным образом в меньшую сторону. Далее нужно иметь в виду, что можно допустимую частоту переключений определить, если установить необходимый срок службы регулятора, зная при этом минимальное нормируемое число срабатываний (циклов) одного из элементов регулятора.
2. Недопустимость прекращения подачи теплоносителя, например, в калориферы приточной вентиляционной установки или в калориферы первого подогрева установки кондиционирования воздуха. Нужно иметь в виду, что если в зимнее время года полностью или даже частично перекрыть подачу теплоносителя в калориферы, то при работающем вентиляторе, который просасывает холодный воздух с большой скоростью, он весьма быстро может замерзнуть.
3. Недопустимость большого отклонения нерегулируемых параметров среды. Здесь имеется в виду, что в целом ряде случаев регулируется один из параметров воздуха, а другой не регулируется, но должен быть в определенных пределах.
К примеру, можно назвать поддержание определенной температуры в цехах текстильного производства. Здесь ставится задача регулирования такой температуры, при которой будут выдержаны условия по поддержанию относительной влажности в определенных пределах. Однако, если температура выдерживается в заданных пределах, то колебания относительной влажности выходят из зоны допустимых.
Последнее обстоятельство можно объяснить тем, что коэффициенты емкости объекта регулирования по температуре сравнительно более высокие, чем те же коэффициенты по относительной влажности. Очень часто на практике приходится отказываться от двухпозиционного регулирования температуры в подобных цехах.
4. Недопустимость резкого и значительного отклонения параметров регулирующей среды при соблюдении требований к колебаниям регулируемых параметров.
Например, температура приточного воздуха при двухпозиционном регулировании теплопроизводительности калорифера приточной камеры может иметь столь существенные отклонения, что они вызовут неприятные ощущения дутья на рабочих местах. В целом же колебания внутренней температуры не превысят установленных пределов.
Это обстоятельство можно также объяснить различными величинами коэффициентов емкости калорифера как объекта регулирования температуры приточного воздуха и производственного помещения как объекта регулирования внутренней температуры.
Таким образом, если имеется подходящая характеристика объекта и нет причин для отказа от двухпозиционного регулятора, всегда нужно стремиться к установке последнего. Этот вид регулятора оказывается наиболее простым и дешевым, надежным в эксплуатации и не требующим квалифицированного ухода. Кроме того, такие регуляторы обеспечивают устойчивое качество регулирования.
Немаловажным обстоятельством является и то, что на привод двухпозиционного регулятора очень часто требуется минимум затрат энергии, так как она используется только в моменты закрытия или открытия.
Присоединяйтесь к нашему каналу в Telegram «Автоматика и робототехника»! Узнавайте первыми о захватывающих новостях и увлекательных фактах из мира автоматизации: Автоматика и робототехника в Telegram
Законы автоматического регулирования

Законом регулирования называют функциональную связь
между регулирующим воздействием и отклонением
регулируемого параметра от заданного значения:
u(τ) = f ∆y(τ) ,
где u(τ) — регулирующее воздействие ;
∆y(τ) – рассогласование.
Закон регулирования — это основная характеристика
регулятора,
определяющая
способ
формирования
регулирующего воздействия.
Выбор закона регулирования производится в
зависимости от свойств объекта, условий его работы и
требуемых показателей качества регулирования.
2. Законы автоматического регулирования
В практике автоматического регулирования
используются следующие законы
регулирования:
• Позиционные (2-х и 3-х)
(Поз)
• Пропорциональный
(П)
• Интегральный
(И)
• Пропорционально-интегральный (ПИ)
• Пропорционально-дифференциальный (ПД)
• Пропорционально-интегральнодифференциальный
(ПИД)
3. Законы автоматического регулирования
Позиционное регулирование
При позиционном регулировании регулятор
в зависимости от текущего значения
регулируемого параметра переключает
регулирующее воздействие с одного
фиксированного уровня на другой.
В практике используют двух- и
трехпозиционное регулирование, при которых
таких уровней, соответственно, два или три.
4. Законы автоматического регулирования
Двухпозиционное регулирование
Математическая формулировка идеального
(без зоны нечувствительности)
двухпозиционного закона регулирования
имеет вид:
u(τ) = U₁ при ∆y(τ) ≤ 0
u(τ) = U₂ при ∆y(τ) > 0
Например,
U₁ = 1
U₂ = 0
т.е. «Вкл / Выкл»
5. Законы автоматического регулирования
Двухпозиционное регулирование
При работе двухпозиционного регулятора
регулируемый параметр находится в состоянии
постоянных незатухающих колебаний.
6. Законы автоматического регулирования
Двухпозиционное регулирование
Параметры настройки двухпозиционного
регулятора:
• уставка y0 (заданное значение
регулируемого параметра)
• уровни регулирующего воздействия UМАКС
(вкл.; 1), UМИН (выкл.; 0)
• зона нечувствительности δ (зона
неоднозначности, дифференциал)
7. Законы автоматического регулирования
Двухпозиционное регулирование
Качество двухпозиционного
регулирования характеризуется
периодом колебаний τК
амплитудой А
А = (Δy1 + Δy2)/2
условной статической ошибкой
регулирования ΔyСТ ΔyСТ = yСР – y0
8. Трехпозиционное регулирование
При трехпозиционном регулировании
используют обычно два выходных реле
регулятора. Три уровня воздействия на
объект регулирования формируют путем
включения одного или другого реле и
выключением их обоих. Процесс
трехпозиционного регулирования проходит
таким образом, что одно из выходных реле
управляет «нагревателем», а второе «холодильником».
9. Трехпозиционное регулирование
10. Трехпозиционное регулирование
Параметрами настройки трехпозиционного
регулятора являются:
•уставка (на рисунке – Туст);
•уровни регулирующего воздействия
(UМАКС – включен нагреватель, UСР – все
выключено, UМИН – включен холодильник);
• зона нечувствительности δ;
•гистерезис γ.
11. Трехпозиционное регулирование
Качество позиционного регулирования характеризуется
периодом колебаний τК, амплитудой А, и условной
статической ошибкой регулирования ΔТСТ.
Амплитуду колебаний можно определить как среднее
арифметическое максимальных отклонений регулируемого
параметра от уставки в большую и меньшую стороны:
А = (ΔТ1 + ΔТ2)/2.
Условная статическая ошибка определяется как разность
между фактическим средним значением регулируемого
параметра и уставкой регулирования:
ΔТСТ = ТСР – ТУСТ.
12. Законы автоматического регулирования
Пропорциональный закон регулирования
При пропорциональном законе
регулирующее воздействие u (τ) прямо
пропорционально рассогласованию ∆y(τ):
u (τ) = Кр ∙ ∆y(τ)
где Кр – коэффициент передачи регулятора,
является параметром его настройки.
13. Законы автоматического регулирования
Пропорциональный закон регулирования
Примером реализации этого закона может служить
работа поплавкового регулятора уровня прямого
действия
u (τ) = Кр ∙ ∆y(τ)
14. Законы автоматического регулирования
Пропорциональный закон регулирования
Для работы пропорционального
регулятора характерно:
• Наличие статической ошибки
регулирования ( ∆yСТ ≠ 0 )
• Наиболее быстрая стабилизация
регулируемого параметра, время
регулирования меньше, чем у других
регуляторов (τР — минимальное)
15. Законы автоматического регулирования
Интегральный закон регулирования
При интегральном законе регулирующее
воздействие прямо пропорционально
интегралу рассогласования по времени
u (τ) = 1 / ТИ ∙ ∫ ∆y(τ)dτ
• где ТИ – постоянная времени
интегрирования (параметр настройки
регулятора); часто величину 1 / ТИ в
формуле заменяют на КР по аналогии с
формулой пропорционального закона.
16. Законы автоматического регулирования
Интегральный закон регулирования
Для работы И-регулятора характерно :
• Отсутствие статической ошибки регулирования
(∆yСТ = 0 )
• Время регулирования больше, чем у всех других
регуляторов (τР — максимальное)
• Максимальное динамическое отклонение Δy1
больше, чем у всех других регуляторов
17. Законы автоматического регулирования
Пропорционально-интегральный закон регулирования
Пропорционально-интегральный (ПИ) закон
регулирования является комбинацией П- и Изаконов:
u (τ) = Кр ∙[ ∆y(τ) + 1 / ТИ ∙ ∫ ∆y(τ)dτ ].
ПИ-регулятор имеет два параметра настройки:
КР — коэффициент передачи регулятора;
ТИ — время изодрома или время удвоения.
Обеспечивает более высокое качество регулирования,
чем П- и И-регуляторы.
18. Законы автоматического регулирования
Пропорционально-интегральный закон
регулирования
Для работы ПИ-регулятора характерно:
• Отсутствие статической ошибки регулирования
( ∆yСТ = 0 )
• Время регулирования τР меньше, чем у
интегрального
• Максимальное динамическое отклонение Δy1
меньше, чем у пропорционального и интегрального
19. Законы автоматического регулирования
Пропорционально-интегральнодифференциальный закон регулирования
Наиболее сложным законом регулирования
является пропорционально-интегральнодифференциальный (ПИД), который
описывается выражением
u (τ) = Кр ∙[ ∆y(τ) + 1 / ТИ ∙ ∫ ∆y(τ)dτ +
+ ТД∙ d(∆y(τ))/dτ ]
• где ТД – постоянная времени
дифференцирования или время предварения.
20. Законы автоматического регулирования
Пропорционально-интегральнодифференциальный закон регулирования
ПИД-регулятор имеет три параметра
настройки:
КР — коэффициент передачи регулятора;
ТИ — время изодрома или время удвоения;
ТД — постоянная времени дифференцирования.
Применяется на наиболее «трудных» объектах
и там, где требуется обеспечить высокое
качество регулирования.
21. Законы автоматического регулирования
Пропорционально-интегральнодифференциальный закон регулирования
Для работы ПИД-регулятора характерно:
• Отсутствие статической ошибки регулирования
( ∆yСТ = 0 );
• Время регулирования τР меньше, чем у
интегрального и ПИ;
• Максимальное динамическое отклонение Δy1
меньше, чем при других законах.