Что такое асинхронный двигатель, устройство и принцип действия асинхронного двигателя
Электрическими двигателями называют механизмы, предназначенные для преобразования электрической энергии в механическое движение. Электромоторы сопровождают человека практически во всех сферах его деятельности. Без них невозможно представить современную жизнь. Несмотря на надежность и долговечность, все же случаются поломки и сбои в работе таких устройств. Знание характеристик, особенностей поможет правильно выбирать, обслуживать и при необходимости ремонтировать асинхронные двигатели.
В асинхронных двигателях переменного тока (АД) частота вращения ротора не синхронизирована с частотой магнитного поля, индуцируемого током обмотки статора. От этого принципа произошло определение этой группы электромашин. В синхронных электрических машинах частоты совпадают.
Виды асинхронных двигателей
В настоящее время разработано и применяется множество различных разновидностей АД, которые различаются конструктивно и по характеристикам. Бывают однофазные, двухфазные, трехфазные, многофазные конструкции, которые работают от сети переменного тока. Различается количество полюсов. Применяются модификации с постоянной и переменной частотой тока, последние называются инверторными. По типу ротора различают 2 вида: фазные электродвигатели и с короткозамкнутым ротором. Асинхронные электрические моторы выгодно отличаются от других преобразователей энергии компактностью, долговечностью высоким КПД.
Область применения асинхронных двигателей
АД распространены очень широко, и являются самым популярным типом электромашин. Асинхронные электродвигатели используют в компрессорах, системах водоснабжения, отопления, кондиционирования, автомобилестроении. Особенно востребованы такие устройства в областях, где требуется точно выдерживать скорость вращения вала, например при производстве полимеров, стеклотканей, проволоки.
Относительно маломощные однофазные агрегаты работают в вентиляторах, маломощной бытовой технике. Более производительные двухфазные агрегаты популярнее, их применяют в приводах стиральных машин, холодильников, иных приборов.
Значительно шире используются трехфазные асинхронные электромашины, в первую очередь в промышленности. Ими оснащают электроприводы станков, подъемных кранов, лифтов, многого другого. Этому способствуют надежность и экономичность электродвигателей.

Как устроен АД
Асинхронный электродвигатель состоит из двух основных узлов: неподвижного статора и вращающегося вокруг своей оси ротора. Статор представляет собой стандартную конструкцию, где сердечник выполнен как полый цилиндр, изготовленный из стальных пластин, изолированных друг от друга. В расположенных на внутренней окружности открытых пазах уложена первичная обмотка, на которую подается напряжение электрической сети.
Внутри статора расположен ротор, опирающийся на вал через подшипники. Сами подшипники с обеих сторон закрыты фиксирующими их крышками. Весь агрегат помещается в металлический корпус. У асинхронных двигателей средней и высокой мощности для более эффективного охлаждения в корпусе предусмотрены ребра, а также вентилятор на валу. Предусмотрена клеммная коробка, куда выводятся концы обмоток.
Ротор может быть двух типов: короткозамкнутым и фазным. Конструктивно они различаются, соответственно асинхронные двигатели принадлежат к одной из двух групп по типу ротора.
Асинхронный двигатель с короткозамкнутым ротором
Конструкция такого ротора предельно проста. Сердечник выполнен из штампованных листов, а роль вторичной обмотки играет набор параллельных друг другу металлических стержней, торцы которых замкнуты между собой стальными кольцами. Механизм напоминает беличье колесо.
Обмотки статора расположены под углом 120°. Если подать на них переменное напряжение со сдвигом 120°, внутри возникает вращающееся магнитное поле. Если поместить эту самую беличью клетку внутрь вращающегося поля, его силовые линии будут пересекать проводники ротора, и наводить в них электродвижущую силу, а соответственно появятся токи. В результате там создается собственное магнитное поле, которое будет взаимодействовать с вращающимся полем, входить с ним в «зацепление». Это означает, что ротор начинает вращаться в ту же сторону, что и магнитное поле статора.
Частота вращения ротора всегда меньше, чем частота поля статора. Если он «догонит» частоту статора, ЭДС наводиться не будет, вращающий момент станет равным нулю, и электродвигатель перестанет работать. В этом эффекте и кроется смысл асинхронности. Относительная величина отставания, выраженная в условных единицах, называется скольжением. Этот параметр зависит от характеристик ротора, в том числе его сопротивления.
Асинхронные двигатели с короткозамкнутым ротором не имеют подвижных контактов, их узлы проще, благодаря чему надежны и долговечны. Применяются в системах, не требующих регулировки скорости вращения, поскольку она затруднена, конструкция усложняется.
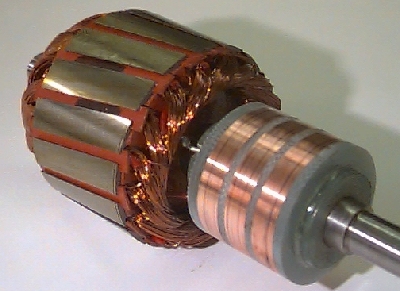
Асинхронный двигатель с фазным ротором
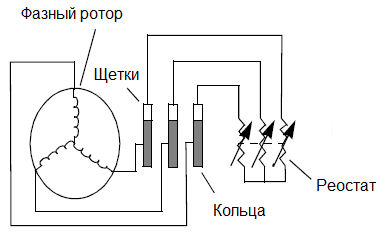
Фазный ротор по конструкции незначительно отличается от статора. Сердечник состоит из набора изолированных пластин, изготовленных из электростатической стали и закрепленных на вале. Между пластинами предусмотрены пазы, ориентированные вдоль продольной оси. В них укладываются витки вторичной обмотки, ее называют фазной. Число фаз обмоток статора и ротора должно быть одинаковым. Электрические цепи ротора подключается тремя контактными кольцами, на которых закреплены концы обмотки. Фазы соединяются звездочкой или треугольником. В двухполюсном асинхронном двигателе оси обмоток смещены друг относительно друга на 120°.
Предусмотрена возможность подключения дополнительного внешнего сопротивления для улучшения пусковых характеристик. Обычно используется реостат со ступенчатой регулировкой. Двигатель в такой конфигурации набирает обороты тоже ступенчато. При достижении оптимальных оборотов реостат отключается путем закорачивания токосъемных колец.
Особенности разных типов роторов
Электродвигатели с короткозамкнутыми роторами характеризуются следующими достоинствами:
- постоянная скорость, которая не зависит от изменения нагрузки;
- устойчивость к кратковременным механическим перегрузкам;
- простой пуск и подключение.
Отмечают более высокий КПД и легкую автоматизацию. В то же время данный тип электрических моторов имеет и недостатки, основной из которых — сложная регулировка скорости. Поэтому такая конструкция применяется в системах с постоянной скоростью вращения электродвигателя. Помимо этого, недостатками считают большой ток и недостаточное усилие при пуске.
Электромоторы с фазным ротором уступают короткозамкнутым по потерям мощности из-за более сложной конструкции. Их применяют при необходимости регулировки скорости, уменьшении пускового тока и увеличении крутящего момента в момент старта.
Способы подключения
Запуск электромотора должен происходить с минимальным скачком тока в обмотках. Для этого применяется 5 основных способов подключения:
- непосредственный — питание подается прямо на контакты электродвигателя через контактор или пускатель, когда падение напряжения не критично;
- снижение напряжения в течение времени старта;
- схема соединения обмоток статора переключается на треугольник со звезды;
- плавный запуск;
- изменение частоты напряжения сети.
Для однофазных версий используют расщепление полюсов, конденсаторный или резисторный пуск. Трехфазные электродвигатели запускаются или напрямую, переключением на треугольник, или посредством преобразователя напряжения, будь то реостат, трансформатор. Применяют изменение числа пар полюсов.
Как обеспечивается регулировка скорости
Регулировать частоту вращения асинхронного двигателя не так просто. Существуют 3 возможности. Можно изменить:
- частоту питающей сети;
- число пар полюсов;
- величину скольжения.
Чтобы изменить число пар полюсов нужно специальным образом заложить обмотку статора. Дальнейшие действия заключаются в возможности переключаться на одну, две или три пары полюсов. Такое переключение будет ступенчатым. Соответственно, дискретно будет меняться и частота вращения ротора асинхронного двигателя. В многополюсных обмотках статора частота выше.
Второй способ — изменить скольжение. Его величина зависит, в том числе, и от сопротивления. Для этого ротор оснащают обмотками и делают выводы через кольца. Появляется скользящий контакт, надежность уменьшается. Но помощью реостата или ступенчатого переключения можно вводить дополнительное сопротивление в ротор и плавно, либо дискретно, изменять величину скольжения. Посредством этого действия появляется возможность регулировать частоту вращения асинхронных двигателей.
Однако эти способы не очень экономичны или неудобны. С развитием силовой электроники появился третий, самый действенный способ — изменять частоту питающей сети, для чего служат частотные преобразователи. При плавном изменении частоты питающего тока можно получить непрерывный ряд частот магнитного поля статора асинхронного двигателя в определенном диапазоне, а значит так же плавно изменять скорость вращения вала. Силовая электроника дала АД новый толчок в развитии, их доля превышает 80% всех электродвигателей в мире.
Как обеспечивается высокий пусковой момент
Одним из достоинств асинхронного двигателя с фазным ротором является высокий пусковой момент, тогда как короткозамкнутые роторы такого преимущества не обеспечивают. Об этом говорит его механическая характеристика. В момент пуска токи достигают 5 –7 значений номинальной величины, а произведение силы тока на магнитный поток и дает момент вращения.
Если представить, что ротор конструктивно устроен в виде двух беличьих колес разного диаметра, вставленных друг в друга, то в момент пуска первоначальный момент будет приложен к внешнему колесу большего диаметра. Происходит это из-за явления вытеснения тока на высокой частоте, он называется скин-эффект. При двыхполюсной катушке, частоте сети 50 Гц, магнитное поле ротора развивает угловую скорость 3 тыс. об/мин. Скин-слой при этом составляет 9 мм. В многополюсных машинах этот слой больше. Поэтому, при пуске ток вытесняется наружу, и за счет более длинного рычага возрастает момент. Когда электрическая машина набирает номинальные обороты и переходит в двигательный режим, скин-эффект нивелируется. С ростом частоты вращения ротора падает частота индукции в обмотке. Тогда ток идет уже по внутренней части. По этому принципу и обеспечивается высокая тяга на пуске.
В реальной практике в асинхронных двигателях с повышенным пусковым моментом скин-эффект обеспечивается за счет формирования глубокого паза в фазном роторе. Ток распределяется в разные моменты времени по глубине паза в разных областях. При пуске ток концентрируются во внешней части, потом когда двигатель раскручивается, скин-эффект исчезает. Ток перераспределяется в глубину паза, рабочий вращающий момент становится меньше. Это означает, что в устоявшемся двигательном режиме АД значительно экономичнее, частые старты повышают затраты.
Асинхронный преобразователь энергии как генератор
Генераторы предназначены для преобразования механической энергии вращения в электроэнергию. Если вращать ротор асинхронного двигателя и достигнуть частоты вращения поля статора, ток перестанет наводиться, и вращающий момент не будет создаваться. Если приложить внешнюю силу и продолжить вращать этот ротор по направлению поля с еще более высокой частотой вращения, в роторе начнет вновь начнет наводиться ЭДС, но противоположного направления. Электрический ток будет идти в другую сторону, не как в двигательном режиме. Эти токи будут наводить противоЭДС в обмотке статора. В ней будет создаваться ток. Такая конструкция является асинхронным генератором.
Если асинхронный двигатель включить в сеть, а потом начать вращать его ротор быстрее, чем частота поля статора в том же направлении, то возникнет генерация в сеть. При этом асинхронный двигатель будет потреблять из сети реактивную энергию для создания магнитного поля, а выдавать активную энергию. Пример — знаменитые электромобили «Tesla» первого поколения. Их оснащали современным инновационным асинхронным преобразователем энергии. Он работал как в режиме двигателя на разгоне, так и в режиме генератора при рекуперативном торможении, когда электроэнергия через инвертор поступает на зарядку батареи.
Асинхронные генераторы принадлежат к группе приборов, вырабатывающих переменный ток разной частоты. В схему включают инвертор, где ток преобразуется в постоянный. Затем снова в переменный, но уже с точно заданной частотой сети — 50 герц.
Преимущества и недостатки асинхронных двигателей
АД, благодаря своим качествам, снискали высокую популярность. К несомненным преимуществам таких устройств относят:
- простую и отработанную конструкцию;
- низкие затраты в эксплуатации: себестоимость единицы мощности в асинхронных двигателях самая низкая;
- надежность, простоту обслуживания, чему способствует отсутствие щеток
- невысокую стоимость.
Благодаря сдвигу фаз не требуются дополнительные устройства и преобразователи для формирования крутящего момента. Не последнюю роль играют малые потери. КПД при работе с максимальной нагрузкой может достигать 97 % благодаря минимальному количеству узлов.
Как и всем устройствам, асинхронным преобразователям присущи недостатки. Среди них:
- затрудненное регулирование скорости вращения вала, узкий диапазон изменения.
- высокие токи при пуске, что может привести к скачкам напряжения в сети.
- инерционность ротора в момент старта: асинхронный двигатель может не запуститься, если приводит массивный агрегат.
- зависимость от параметров сети.
Современные механические и электротехнические конструктивные решения почти полностью нивелируют эти недостатки.
И все же, несмотря на все достоинства, ресурс асинхронных электрических моторов не вечен. Бывают проскальзывания ротора относительно вала, замыкания обмоток, обрывы, повреждения корпуса, износ подшипников, другие неисправности. Все это проявляет себя падением мощности, посторонними звуками и запахами, а то и полным отказом. Приобретать новый агрегат бывает накладно, да и не всегда имеет смысл. В подавляющем большинстве случаев рациональнее устранить неисправность и продолжить эксплуатацию электрического двигателя.
Ремонтом электромоторов любого типа и мощности в Санкт- Петербурге занимается компания «Хельд Вэй». Оперативно и качественно выполняются все работы по восстановлению работоспособности электромоторов независимо от сложности. Каждая отремонтированная электрическая машина проходит испытания, чтобы убедиться в соответствии параметров требованиям к новому агрегату.
На работу предоставляются скидки, гарантии. Текущий ремонт возможен по месту эксплуатации, с выездом мастеров. Капитальный и ремонт средней степени производятся на территории предприятия. Имеются запчасти и комплектующие.
§76. Асинхронный двигатель с короткозамкнутым ротором

Асинхронный двигатель с короткозамкнутым ротором (рис. 249 и 250) состоит из следующих основных частей: статор с трехфазной обмоткой, ротор с короткозамкнутой обмоткой и остов. Обмотка ротора выполнена бесконтактной (она не соединена ни с какой внешней цепью), что определяет высокую надежность такого двигателя.
Магнитная система. Асинхронная машина в отличие от машины постоянного тока не имеет явно выраженных полюсов. Такую магнитную систему называют неявнополюсной. Число полюсов в машине определяется числом катушек в обмотке статора и схемой их соединения. В четырехполюсной машине (рис. 251) магнитная система состоит из четырех одинаковых ветвей, по каждой из которых проходит половина магнитного потока Фп одного полюса, в двухполюсной машине таких ветвей две, в шестиполюсной — шесть и т. д. Так как через все элементы магнитной системы проходит переменный магнитный поток, то не только ротор 1, но

Рис. 249. Асинхронный двигатель с короткозамкнутым ротором: 1 — остов; 2 — статор; 3 — ротор; 4 — стержни обмотки ротора; 5 — подшипниковый щит; 6 — вентиляционные лопатки ротора; 7 — вентилятор; 8 — коробка выводов

Рис. 250. Электрическая схема асинхронного двигателя с короткозамкнутым ротором (а) и его условное графическое изображение (б): 1 — статор; 2 — ротор

Рис.251. Магнитное поле четырехполюсной асинхронной машины

Рис. 252. Листы ротора (а) и статора (б)

Рис. 253. Пакет собранного статора (а) и статор с обмоткой (б)
и статор 2 выполняют из листов электротехнической стали (рис. 252), изолированных один от другого изоляционной лаковой пленкой, окалиной и пр. В результате этого уменьшается вредное действие вихревых токов, возникающих в стали статора и ротора при вращении магнитного поля. Листы статора и ротора имеют пазы открытой, полузакрытой или закрытой формы, в которых располагаются проводники соответствующих обмоток. В статоре чаще всего применяют полузакрытые пазы прямоугольной или овальной формы, в машинах большой мощности — открытые пазы прямоугольной формы.
Сердечник статора 1 (рис. 253, а) запрессовывают в литой остов 3 и укрепляют стопорными винтами. Сердечник ротора напрессовывают на вал ротора, который вращается в шариковых подшипниках, установленных в двух подшипниковых щитах. Воздушный зазор между статором и ротором имеет минимальный размер, допускаемый с точки зрения точности сборки и механической жесткости конструкции. В двигателях малой и средней мощности воздушный зазор обычно составляет несколько десятых миллиметра. Такой зазор обеспечивает уменьшение магнитного сопротивления магнитной цепи машины, а следовательно, и уменьшение намагничивающего тока, требуемого для создания в двигателе магнитного потока. Снижение намагничивающего тока позволяет повысить коэффициент мощности двигателя.
Обмотка статора. Она выполнена в виде ряда катушек из проволоки круглого или прямоугольного сечения. Проводники, находящиеся в пазах, соединяются, образуя ряд катушек 2 (рис. 253,б). Катушки разбивают на одинаковые группы по числу фаз, которые располагают симметрично вдоль окружности статора (рис. 254, а) или ротора. В каждой такой группе все катушки электрически соединяются, образуя одну фазу обмотки, т. е. отдельную электрическую цепь. При больших значениях фазного тока или при необходимости переключения отдельных катушек фазы могут иметь несколько параллельных ветвей. Простейшим элементом обмотки является виток (рис. 254,б), состоящий из двух проводников 1 и 2, размещенных в пазах, находящихся друг от друга на неко-

Рис. 254. Расположение катушек трехфазной обмотки на статоре асинхронного двигателя (а) и виток из двух проводников (б)
тором расстоянии у. Это расстояние приблизительно равно одному полюсному делению т, под которым понимают длину дуги, соответствующую одному полюсу.
Обычно витки, образованные проводниками, лежащими в одних и тех же пазах, объединяют в одну или две катушки. Иногда их называют секциями. Их укладывают таким образом, что в каждом пазу размещается одна сторона катушки или две стороны — одна над другой. В соответствии с этим различают одно- и двухслойные обмотки. Основным параметром, определяющим распределение обмотки по пазам, является число пазов q на полюс и фазу.
В обмотке статора двухполюсного двигателя (см. рис. 254, а) каждая фаза (А-Х; B-Y; C-Z) состоит из трех катушек, стороны которых расположены в трех смежных пазах, т. е. q = 3. Обычно q > 1, такая обмотка называется распределенной.
Наибольшее распространение получили двухслойные распределенные обмотки. Их секции 1 (рис. 255, а) укладывают в пазы 2 статора в два слоя. Проводники обмотки статора укрепляют в пазах текстолитовыми клиньями 5 (рис. 255,б), которые закладывают у головок зубцов.
Стенки паза покрывают листовым изоляционным материалом 4 (электрокартоном, лакотканью и пр.). Проводники, лежащие в пазах, соединяют друг с другом соответствующим образом с торцовых сторон машины. Соединяющие их провода называют лобовыми частями. Так как лобовые части не принимают участия в индуцировании э. д. с, их выполняют как можно короче.
Отдельные катушки обмотки статора могут соединяться «звездой» или «треугольником». Начала и концы обмоток каждой фазы выводят к шести зажимам двигателя.
Обмотка ротора. Обмотка ротора выполнена в виде беличьей клетки (рис. 256,а). Она сделана из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами (рис. 256,б). Стержни этой обмотки вставляют в пазы ротора без какой-либо изоляции, так как напряжение в короткозамкну-

Рис. 255. Двухслойная обмотка статора асинхронного двигателя: 1 — секция; 2 — паз; 3 — проводник; 4 — изоляционный материал; 5 — клин; 6 — зубец

Рис. 256. Короткозамкнутый ротор: а — беличья клетка; б — ротор с беличьей клеткой из стержней; в — ротор с литой беличьей клеткой; 1 — короткозамыкающие кольца; 2— стержни; 3— вал; 4 — сердечник ротора; 5 — вентиляционные лопасти; 6 — стержни литой клетки
той обмотке ротора равно нулю. Пазы короткозамкнутого ротора обычно выполняют полузакрытыми, а в машинах малой мощности — закрытыми (паз имеет стальной ободок, отделяющий его от воздушного зазора). Такая форма паза позволяет хорошо укрепить проводники обмотки ротора, хотя и несколько увеличивает ее индуктивное сопротивление.
В двигателях мощностью до 100 кВт стержни беличьей клетки обычно получают путем заливки расплавленного алюминия в пазы сердечника ротора (рис. 256, в). Вместе со стержнями беличьей клетки отливают и соединяющие их торцовые короткозамыкающие кольца.
Для этой цели пригоден алюминий, так как он обладает малой плотностью, достаточно высокой электропроводностью и легко плавится.
Обычно двигатели имеют вентиляторы, насаженные на вал ротора. Они осуществляют принудительную вентиляцию нагретых частей машины (обмоток и стали статора и ротора), позволяя получить от двигателя большую мощность. В двигателях с короткозамкнутым ротором лопасти вентилятора часто отливают совместно с боковыми кольцами беличьей клетки (см. рис. 256, в).
Асинхронные двигатели с короткозамкнутым ротором просты по конструкции, надежны в эксплуатации. Их широко применяют для привода металлообрабатывающих станков и других устройств, которые начинают работать без нагрузки. Однако сравнительно малый пусковой момент у этих двигателей и большой пусковой ток не позволяют использовать их для привода таких машин и механизмов, которые должны пускаться в ход сразу под большой нагрузкой (с большим пусковым моментом). К таким машинам относятся грузоподъемные устройства, компрессоры и др.
Увеличить пусковой момент и уменьшить пусковой ток можно при выполнении беличьей клетки с повышенным активным сопротивлением. При этом двигатель будет иметь увеличенное скольжение и большие потери мощности в обмотке ротора. Такие двигатели называют двигателями с повышенным скольжением (обозначаются АС). Их можно использовать для привода машин, работающих сравнительно небольшое время. На э. п. с. переменного тока эти двигатели (со скольжением до 10%) применяют для привода компрессоров, которые работают периодически в течение коротких промежутков времени при уменьшении давления в воздушных резервуарах ниже определенного предела.
Двигатели с повышенным пусковым моментом. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом имеют специальную конструкцию ротора (обозначаются АП). К ним относятся двигатели с двойной беличьей клеткой и двигатели с глубокими пазами.
Ротор 3 (рис. 257,а) двигателя с двойной беличьей клеткой имеет две короткозамкнутые обмотки. Наружная клетка 1 является пусковой. Она обладает большим активным и малым реактивным сопротивлениями. Внутренняя клетка 2 является основной обмоткой ротора; она, наоборот, обладает незначительным активным и большим реактивным сопротивлениями. В начальный момент пуска ток проходит, главным образом, по наружной клетке, которая создает значительный вращающий момент. По мере увеличения частоты вращения ток переходит во внутреннюю клетку, и по окончании процесса пуска машина работает как обычный короткозамкнутый двигатель с одной (внутренней) клеткой. Вытеснение тока в наружную клетку в начальный момент пуска объясняется действием, э. д. с. самоиндукции, индуцируемой в проводниках ротора. Чем ниже расположен в пазу проводник, тем большим магнитным потоком рассеяния 6 он охватывается и тем большая э. д. с. самоиндукции в нем индуцируется (рис. 257, в), следовательно, тем большее он будет иметь индуктивное сопротивление.
Вытеснение тока в верхние проводники ротора сильно сказывается при неподвижном роторе, когда частота тока, индуцируемого в обеих клетках ротора, велика. При этом индуктивные

 Рис. 257. Конструкция роторов асинхронных двигателей с повышенным пусковым моментом: с двойной беличьей клеткой (а), с глубокими пазами (б) и разрезы их пазов (в и г)
Рис. 257. Конструкция роторов асинхронных двигателей с повышенным пусковым моментом: с двойной беличьей клеткой (а), с глубокими пазами (б) и разрезы их пазов (в и г)
сопротивления обеих клеток значительно больше активных и ток распределяется между ними обратно пропорционально их индуктивным сопротивлениям, т. е. проходит в основном по наружной клетке с большим активным сопротивлением. По мере возрастания частоты вращения ротора частота тока в нем будет уменьшаться (вращающееся магнитное поле будут пересекать проводники ротора с меньшей частотой), и ток начнет проходить по обеим клеткам в соответствии с их активными сопротивлениями, т. е., главным образом, через внутреннюю клетку.
Таким образом, процесс пуска двигателя с двойной беличьей клеткой имеет сходство с процессом пуска асинхронного двигателя с фазным ротором, когда в начале пуска в цепь обмотки ротора вводится добавочное активное сопротивление (пусковой реостат), а по мере разгона это сопротивление выводится. Точно так же и в рассматриваемом двигателе ток в начале пуска проходит по наружной клетке с большим активным сопротивлением, а затем по мере разгона постепенно переходит во внутреннюю клетку с малым активным сопротивлением.
Для повышения активного сопротивления пусковой клетки стержни ее изготовляют из маргацовистой латуни или бронзы. Стержни рабочей клетки выполняют из меди, обладающей малым удельным сопротивлением, причем площадь поперечного сечения их больше, чем у пусковой клетки. В результате этого активное сопротивление пусковой клетки увеличивается в 4—5 раз по сравнению с рабочей. Между стержнями обеих клеток имеется узкая щель 5, размеры которой определяют индуктивность рабочей клетки. Двухклеточный двигатель на 20—30% дороже коротко-замкнутого двигателя обычной конструкции. Для упрощения технологии изготовления ротора двухклеточные двигатели небольшой и средней мощности выполняют с литой алюминиевой клеткой.
Действие двигателей с глубокими пазами (рис. 257, б) также основано на использовании явления вытеснения тока. В этих двигателях стержни 4 беличьей клетки выполнены в виде узких медных шин, заложенных в глубокие пазы ротора 3 (высота паза в 10— 12 раз больше его ширины). Нижние слои стержней, расположенные дальше от поверхности ротора, охватываются значительно большим числом магнитных линий потока рассеяния 6, чем верхние (рис. 257,г), поэтому они имеют во много раз большую индуктивность. В начале пуска в результате увеличенного индуктивного сопротивления нижних частей стержней ток проходит, главным образом, по их верхним частям. При этом используется только небольшая часть поперечного сечения каждого стержня, что приводит к увеличению его активного сопротивления, а следовательно, и к возрастанию активного сопротивления всей обмотки ротора.
При увеличении частоты вращения ротора вытеснение тока в верхние части стержней уменьшается (по той же причине, что и в двигателе с двойной беличьей клеткой), и после окончания пуска ток равномерно распределяется по площади их поперечного сечения.
Асинхронный двигатель с короткозамкнутым ротором: классификация и сферы применения
Асинхронный электрический двигатель — это устройство с вращающимся ротором. Скорость вращения ротора всегда отличается от скорости вращения магнитного поля статора. В этом состоит особенность работы агрегата: при выравнивании скоростей магнитное поле перестанет создавать в роторе ток. Поэтому электродвигатель и называется асинхронным, или неодновременным. Синхронный агрегат имеет одинаковые показатели скоростного вращения.

Сферы применения асинхронных двигателей
Асинхронные двигатели короткозамкнутым ротором — самый распространенный вид привода промышленного и сельскохозяйственного оборудования.
![]()
Электрические двигатели с короткозамкнутым ротором приводят в действие металлообрабатывающие и деревообрабатывающие станки, вентиляторы, компрессоры, лифты, насосы, производственные линии и прочие бытовые устройства.
Конструкция и принцип действия

Основные элементы асинхронного электродвигателя — статор и ротор. Обе детали имеют цилиндрическую форму и изготовлены из листов электротехнической стали. Ротор помещен внутрь статора с небольшим технологическим зазором, а обмотки из медного провода укладываются в пазы, расположенные на внутренней стороне статора. Оси обмоток смещаются на 1200 относительно друг друга, концы скрепляются способом «звезда» или «треугольник» в зависимости от подаваемого напряжения.
Ротор асинхронного электроагрегата может быть короткозамкнутым или фазным.

В первом случае деталь представляет собой сердечник из листов электротехнической стали. В его пазах расположены стержни из алюминия, которые замкнуты торцевыми кольцами. Такая структура называется «беличьей клеткой». В более мощном оборудовании вместо алюминия чаще используется медь.
Классификация агрегатов
- трехфазные;
- однофазные.
Трехфазные
Самый распространенный вид двигателя, который применяется как в производственной сфере, так и в сельском хозяйстве. Три рабочие обмотки статора такого агрегата сдвинуты относительно друг друга. Поэтому при включении устройства в трехфазную сеть магнитные поля смещаются в пространстве на 1200. Результатом процесса становится появление магнитного поля, которое вращается и заставляет двигаться короткозамкнутый ротор.

Обмотки статора трехфазного двигателя собираются по принципу «звезда» или «треугольник». Для первого способа необходимо более высокое напряжение, чем для второго. Поэтому на оборудовании изготовители указывают два напряжения: 220/380 или 380/660. Трехфазные короткозамкнутые двигатели монтируются на различные станки, лебедки, циркулярные пилы, подъемные краны и т. д.
Однофазные
У этого устройства малой мощности много общего с трехфазным электрооборудованием, которое имеет короткозамкнутый ротор. Отличие заключается в конструкции статора. В пазах его магнитопровода размещена однофазная обмотка с рабочей фазой с фазной зоной 120 эл. град и выводами к зажимам С1 и С2 и пусковой фазой с фазной зоной 60 эл. град и выводами к зажимам В1 и В2.

Магнитные оси фаз смещены относительно друг друга на 90 электрических градусов. Одна основная фаза не способна вращать ротор. Ее ток создает переменное магнитное поле с неподвижной осью симметрии и гармонически изменяющейся во времени магнитной индукцией. Поэтому однофазные моторы работают вместе с конденсаторами.
Появление асинхронных электродвигателей стало новой ступенью развития промышленности и позволило ей шагнуть далеко вперед. Сегодня такие приводы установлены на оборудовании большинства заводов и фабрик. Количество этих простых в обслуживании и эксплуатации, недорогих и надежных устройств составляет 90% от числа всех электродвигателей в мире.
Короткозамкнутый и фазный ротор — в чем различие
Как вы знаете, асинхронные электродвигатели имеют трехфазную обмотку (три отдельные обмотки) статора, которая может формировать разное количество пар магнитных полюсов в зависимости от своей конструкции, что влияет в свою очередь на номинальные обороты двигателя при номинальной частоте питающего трехфазного напряжения. При этом роторы двигателей данного типа могут отличаться, и у асинхронных двигателей они бывают короткозамкнутыми или фазными. Чем отличается короткозамкнутый ротор от фазного ротора — об этом и пойдет речь в данной статье.

Короткозамкнутый ротор
Представления о явлении электромагнитной индукции подскажут нам, что произойдет с замкнутым витком проводника, помещенным во вращающееся магнитное поле, подобное магнитному полю статора асинхронного двигателя. Если поместить такой виток внутри статора, то когда ток на обмотку статора будет подан, в витке будет индуцироваться ЭДС, и появится ток, то есть картина примет вид: виток с током в магнитном поле. Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Так и работает асинхронный двигатель с короткозамкнутым ротором, только вместо витка на его роторе расположены медные или алюминиевые стержни, замкнутые накоротко между собой кольцами с торцов сердечника ротора. Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо.
Проходящий по обмоткам статора переменный ток, порождающий вращающееся магнитное поле, наводит ток в замкнутых контурах «беличьей клетки», и весь ротор приходит во вращение, поскольку в каждый момент времени разные пары стержней ротора будут иметь различные индуцируемые токи: какие-то стержни — большие токи, какие-то — меньшие, в зависимости от положения тех или иных стержней относительно поля. И моменты никогда не будут уравновешивать ротор, поэтому он и будет вращаться, пока по обмоткам статора течет переменный ток.
К тому же стержни «беличьей клетки» немного наклонены по отношению к оси вращения — они не параллельны валу. Наклон сделан для того, чтобы момент вращения сохранялся постоянным и не пульсировал, кроме того наклон стержней позволяет снизить действие высших гармоник индуцируемых в стержнях ЭДС. Будь стержни без наклона — магнитное поле в роторе пульсировало бы.

Скольжение s
Для асинхронных двигателей всегда характерно скольжение s, возникающее из-за того, что синхронная частота вращающегося магнитного поля n1 статора выше реальной частоты вращения ротора n2.
Скольжение возникает потому, что индуцируемая в стержнях ЭДС может иметь место только при движении стержней относительно магнитного поля, то есть ротор всегда вынужден хоть немного, но отставать по скорости от магнитного поля статора. Величина скольжения равна s = (n1-n2)/n1.
Если бы ротор вращался с синхронной частотой магнитного поля статора, то в стержнях ротора не индуцировался бы ток, и ротор бы просто не стал вращаться. Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть (даже если нагрузка на валу критически мала), но отстает по частоте вращения от частоты синхронной.
Скольжение s измеряется в процентах, и на холостом ходу практически приближается к 0, когда момент противодействия со стороны ротора почти отсутствует. При коротком замыкании (ротор застопорен) скольжение равно 1.
Вообще скольжение у асинхронных двигателей с короткозамкнутым ротором зависит от нагрузки и измеряется в процентах. Номинальное скольжение — это скольжение при номинальной механической нагрузке на валу в условиях, когда напряжение питания соответствует номиналу двигателя.
Другие статьи про асинхронные двигатели с короткозамкнутым ротором на Электрик Инфо:
Фазный ротор
Асинхронные двигатели с фазным ротором, в отличие от асинхронных двигателей с короткозамкнутым ротором, имеют на роторе полноценную трехфазную обмотку. Подобно тому, как на статоре уложена трехфазная обмотка, так же и в пазах фазного ротора уложена трехфазная обмотка.
Выводы обмотки фазного ротора присоединены к контактным кольцам, насаженным на вал, и изолированным друг от друга и от вала. Обмотка фазного ротора состоит из трех частей — каждая на свою фазу — которые чаще всего соединены по схеме «звезда».
К обмотке ротора через контактные кольца и щетки присоединяется регулировочный реостат. Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.
Обмотка статора асинхронного двигателя с фазным ротором выполняется аналогично тому, как и на статорах асинхронных двигателей с короткозамкнутым ротором, и аналогичным путем создает, в зависимости от количества катушек (три, шесть, девять или более катушек), два, четыре и т. д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
Регулируя ток в обмотках ротора, регулируют рабочий момент двигателя и величину скольжения. Когда регулировочный реостат полностью выведен, то для уменьшения износа щеток и колец их закорачивают при помощи специального приспособления для подъема щеток.
- Принципы работы электрического двигателя для начинающих
- Приборы учета электроэнергии — виды и типы, основные характеристики
- Основные виды конструкций трансформаторов
Надеюсь, что эта статья была для вас полезной. Смотрите также другие статьи в категории В помощь начинающим электрикам, Электродвигатели и их применение
Подписывайтесь на наш канал в Telegram: Домашняя электрика
Поделитесь этой статьей с друзьями: