Устройство 3-ф асинхронных и синхронных машин
В электрических машинах происходит преобразование механической энергии в электрическую (электрические генераторы) или электрической энергии в механическую (электрические двигатели) за счет энергии магнитного поля. Для усиления магнитного поля применяются ферромагнитные сердечники, в пазы которых закладываются обмотки, выполняемые, как правило, из меди (иногда — из алюминия). Сердечники и обмотки являются активными частями машины, так как они непосредственно участвуют в процессе преобразования энергии. Для крепления сердечников и обмоток, фиксации взаимного положения вращающейся (ротор) и неподвижной (статор) частей машины служат конструктивные части — станина, щиты, вал, подшипники и т. д.
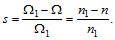
1 Устройство асинхронных машин (рис. 16-1, левая половина). Сердечники статора и ротора набираются из штампованных листов электротехнической стали толщиной 0,5 мм. Предварительно листы лакируются (листы ротора — не всегда). Сердечник статора фиксируется в металлической станине (серый чугун, силумин, сталь), которая неподвижно закрепляется на фундаментной плите. Сердечник ротора насаживается либо непосредственно на вал, либо на сварную (литую) втулку, которая укрепляется на валу. Концы вала опираются на два подшипника. Между сердечниками статора и ротора имеется небольшой воздушный зазор. В пазах сердечника статора размещается многофазная якорная обмотка (см. раздел), в пазах сердечника ротора — или многофазная, обычно трехфазная якорная обмотка, подобная обмотке статора (двигатель с контактными кольцами), или короткозамкнутая обмотка типа беличьей клетки (см. раздел). В двигателях с контактными кольцами выводные концы обмотки ротора, фазы которой сопрягаются обычно в звезду, присоединяются к трем контактным кольцам. С помощью щеток, соприкасающихся с кольцами, в цепь обмотки ротора можно вводить добавочное сопротивление или дополнительную э. д. с. для изменения пусковых или рабочих свойств машины; щетки позволяют также замкнуть обмотку накоротко.
Конкретное конструктивное оформление асинхронных машин очень разнообразно. Оно зависит от ряда факторов: от способа защиты от воздействия среды; от способа охлаждения; от габаритов машины и т. д.
2 Принцип действия асинхронного двигателя (рис. 16-2). Асинхронные машины используются главным образом в качестве электродвигателей. Асинхронный двигатель является наиболее распространенным типом двигателя не только переменного тока, но и вообще электрического двигателя.
Токи  частоты
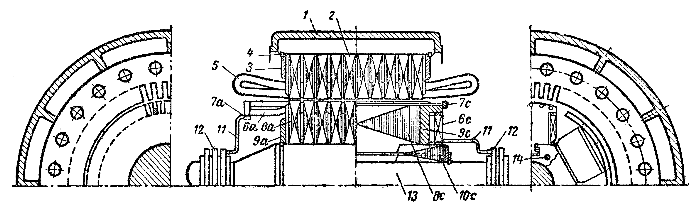
частоты  , потребляемые из сети и взаимно смещенные во времени на 120 эл. град, протекают по фазам обмотки статора, оси которых взаимно смещены в пространстве также на 120 эл. град, и образуют результирующую н. с.
, потребляемые из сети и взаимно смещенные во времени на 120 эл. град, протекают по фазам обмотки статора, оси которых взаимно смещены в пространстве также на 120 эл. град, и образуют результирующую н. с.  вращающуюся в пространстве со скоростью
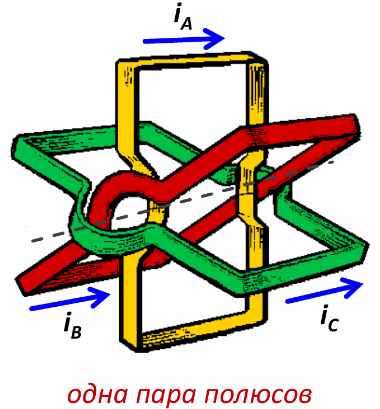
вращающуюся в пространстве со скоростью  , где с — число пар полюсов обмотки, равное числу периодов магнитного поля (на рис. 16-2 каждая фаза обмотки машины с 2р = 2 показана в виде трех катушек). Намагничивающая сила F1 создает вращающееся магнитное поле (см. п. 5), которое наводит в обмотке ротора э. д. с.
, где с — число пар полюсов обмотки, равное числу периодов магнитного поля (на рис. 16-2 каждая фаза обмотки машины с 2р = 2 показана в виде трех катушек). Намагничивающая сила F1 создает вращающееся магнитное поле (см. п. 5), которое наводит в обмотке ротора э. д. с.  . Угловую скорость W1 и частоту вращения n магнитного поля называют синхронными — скоростью и частотой. Под действием э. д. с.
. Угловую скорость W1 и частоту вращения n магнитного поля называют синхронными — скоростью и частотой. Под действием э. д. с.  в обмотке протекает ток
в обмотке протекает ток  .Ток
.Ток  несколько отстает по фазе от э. д. с.
несколько отстает по фазе от э. д. с.  так как обмотка ротора имеет некоторое индуктивное сопротивление. В результате взаимодействия тока ротора
так как обмотка ротора имеет некоторое индуктивное сопротивление. В результате взаимодействия тока ротора  вращающимся магнитным потоком Ф возникает вращающий электромагнитный момент
вращающимся магнитным потоком Ф возникает вращающий электромагнитный момент  , где j— угол сдвига по фазе между
, где j— угол сдвига по фазе между  и
и  . В режиме двигателя ротор под действием момента М приходит во вращение с некоторой скоростью W= 2pn в том же направлении, в каком вращается поле.
. В режиме двигателя ротор под действием момента М приходит во вращение с некоторой скоростью W= 2pn в том же направлении, в каком вращается поле.
Относительную разность угловых скоростей или частот вращения поля и ротора называют скольжением
При изменении нагрузки в широком диапазоне (например, от холостого хода до номинальной) скорость ротора изменяется лишь на 3—5%. При номинальной нагрузке s= 0,03. 0,05,
В асинхронном двигателе частота вращения ротора должна быть меньше частоты вращения поля, так как в случае равенства этих частот в обмотке ротора ие наводилась бы э. д. с, не было бы тока 1 и не возникал бы вращающий электромагнитный момент; под действием которого ротор приходит во вращение. Это различие частот вращения магнитного поля и ротора и послужило причиной наименования рассматриваемых машин асинхронными. Оно также свойственно машине и при работе в режиме генератора и тормоза.

Частота э. д. с. и тока в обмотке ротора
Вращающийся поток машины Ф пропорционален результирующей н. с. обеих обмоток  (н. с.
(н. с.  вращаются в пространстве с одинаковыми скоростями). Он зависит от напряжения U1 частоты f1 питающей сети. При неизменных U1 и f1 поток Ф изменяется очень незначительно (2—3%) при изменении нагрузки двигателя в широком диапазоне (от холостого хода до номинальной).
вращаются в пространстве с одинаковыми скоростями). Он зависит от напряжения U1 частоты f1 питающей сети. При неизменных U1 и f1 поток Ф изменяется очень незначительно (2—3%) при изменении нагрузки двигателя в широком диапазоне (от холостого хода до номинальной).

При работе асинхронной машины в режиме двигателя и электромагнитный момент является вращающим. Если ротор привести во вращение с помощью постороннего двигателя со скоростью W>W1 (статор включен в сеть), то асинхронная машина будет работать в режиме генератора, отдавая активную мощность в сеть; при этом электромагнитный момент направлен навстречу внешнему вращающему моменту. Если ротор под действием внешнего момента вращается навстречу полю, т. е. W
В разделе принята следующая система обозначения выводов трехфазных обмоток: начала фаз обозначаются буквами А, В, С, концы фаз — соответственно буквами X,Y,Z. На рис. 16-2, 16-4 буквами А и А’; В и В’; С и С’ обозначены группы проводников обмоток фаз, в которых попарно ток протекает в противоположных направлениях.
Рис. 16-1. Устройство машин переменного тока.
1 -станина (корпус статора); 2 — сердечник статора; 3 — нажимная гребенка; 4 — шпонка; 5 — обмотка статора; 6а — обмотка ротора; 6с — обмотка возбуждения; 7а — соединительный хомутик обмотки ротора; 7с — демпферная обмотка; 8а — сердечник ротора; 8с — сердечник полюса; 9а — нажимная гребенка; 9с — нажимная шека полюса; 10с — ярмо ротора; 11 — токоподвод к контактным кольцам; 12 — контактные кольца; 13 — вал; 14 — стяжная шпилька.
Рис. 16-2. К объяснению принципа действия трехфазного асинхронного двигателя (2р-2).
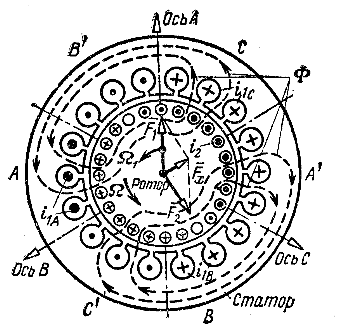
Рис. 16-3. Размеры и устройство неявнополюсного ротора.
1 — массивный сердечник ротора (стальная поковка); 2 — большой зуб ротора; 3 — малый зуб ротора; 4 — осевой канал ротора; 5 -катушка обмотки возбуждения; 6 — аксиальный канал в большом зубе; 7 — стальной клин канала; 8 — клин; 9 — бандажное кольцо; 10 — центрирующее кольцо; 11 — выводы обмотки возбуждения; 12 — контактные кольца.
Распределение токов по фазам обмотки статора показано для момента времени, когда ток в фазе А имеет максимальное значение:

3 Устройство синхронной машины (рис. 16-1, правая половина). Статор синхронной машины принципиально устроен так же, как и статор асинхронной машины (см. п. 1). На роторе, вал которого опирается на подшипники, располагается обмотка возбуждения, имеющая такое же число полюсов 2р, как и обмотка статора. Обмотка возбуждения питается постоянным током через два контактных кольца и щетки от постороннего иточника. Обмотка возбуждения создает магнитное поле возбуждения. Конструктивное оформление ротора существенно зависит от частоты вращения машины. При n 1500 об/мин (соответственно 2р
1500 об/мин (соответственно 2р 4 при f= 50 Гц) применяется явнополюсное исполнение (явно выраженные полюсы)— рис. 16-1. При n=3000 об/мин (иногда при n=1500 об/мин), т. е. при 2р = 2(4) и f=50 Гц применяется неявнополюсное исполнение (неявно выраженные полюсы) — рис. 16-3.
4 при f= 50 Гц) применяется явнополюсное исполнение (явно выраженные полюсы)— рис. 16-1. При n=3000 об/мин (иногда при n=1500 об/мин), т. е. при 2р = 2(4) и f=50 Гц применяется неявнополюсное исполнение (неявно выраженные полюсы) — рис. 16-3.
Сердечник явнополюсного ротора состоит из полюсов и ярма, к которому они прикрепляются. Полюсы обычно собираются из штампованных листов стали марки Ст. 3 толщиной 1—1,5 мм, которые стягиваются коваными или литыми нажимными щеками. В отдельных случаях применяются массивные литые полюсы. Полюсы крепятся к ярму ротора с помощью либо болтов (машины малой и средней мощности с массивным ярмом), либо полюсных хвостов Т-образной (рис. 16-1) или иной формы. На каждом полюсе устанавливается катушка обмотки возбуждения (см. раздел).
Ярмо ротора выполняют массивным (сварное, литое) или шихтованным из штампованных листов стали марки Ст. 3 толщиной 1,5 — 6 мм (если листы штампуются) и до 100 мм (если листы вырезаются пламенем газовой горелки). Листы стягиваются шпильками. При малом наружном диаметре (до 2-4 м) ярмо изготовляется из сплошных листов и насаживается непосредственно на вал. При большом диаметре ярмо собирается из отдельных сегментов, которые крепятся к сварному ободу, жестко связанному с валом с помощью спиц. Для улучшения вентиляции машин, имеющих значительную осевую длину, Обод выполняется подразделенным на несколько пакетов, между которыми имеются каналы для прохождения охлаждающего воздуха к периферийным зонам ротора.
Сердечник неявнополюсного ротора (рис. 16-3) изготовляется как единое целое с хвостовиками (концами вала) из одной поковки из углеродистой (диаметром до 800 мм) или легированной (диаметром свыше 800 мм) стали. Обмотка возбуждения распределяется по нескольким пазам ротора. Для защиты лобовых частей обмотки возбуждения от действия центробежных сил применяют стальные бандажные кольца (каппы), изготовляемые для крупных турбогенераторов из немагнитной стали с высокими механическими свойствами. Бандажное кольцо жестко сопрягается с сердечником или хвостовиком.
Рис. 16-4. К объяснению принципа действия трехфазной синхронной машины (2р-2).
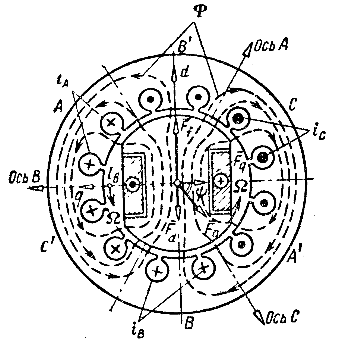
4 Принцип действия синхронной машины (рис. 16-4). Синхронные машины используются преимущественно как генераторы электрической энергии. Синхроный генератор является основным типом генератора переменного тока. Ограниченное, но все более расширяющееся применение находят и синхронные двигатели.
При работе синхронной машины в качестве генератора возбужденный ротор приводится во вращение со скоростью W внешним механическим вращающим моментом (например, моментом гидравлической или паровой турбины). Ток обмотки возбуждения  создает н. с.
создает н. с.  и магнитный поток, неподвижный относительно полюсов и замыкающийся через сердечник статора. Вращающимся потоком возбуждения в обмотке статора индуктируется э. д. с. частоты
и магнитный поток, неподвижный относительно полюсов и замыкающийся через сердечник статора. Вращающимся потоком возбуждения в обмотке статора индуктируется э. д. с. частоты  . Электродвижущие силы фаз трехфазной обмотки Взаимно смещены во времени на эл. град, так как оси обмоток фаз взаимно смещены в пространстве на 120 эл. град (см. п. 5). Если к обмотке статора присоединить симметричную нагрузку, то под действием э. д. с. в ней и во внешней цепи будет протекать симметричная система токов
. Электродвижущие силы фаз трехфазной обмотки Взаимно смещены во времени на эл. град, так как оси обмоток фаз взаимно смещены в пространстве на 120 эл. град (см. п. 5). Если к обмотке статора присоединить симметричную нагрузку, то под действием э. д. с. в ней и во внешней цепи будет протекать симметричная система токов  которые создают н. с. якоря
которые создают н. с. якоря  магнитное поле, вращаюшиеся со скоростью W, т. е. синхронно с ротором (см. п. 5). Результирующий вращающийся магнитный поток Ф образуется совместным действием взаимно неподвижных н. с.
магнитное поле, вращаюшиеся со скоростью W, т. е. синхронно с ротором (см. п. 5). Результирующий вращающийся магнитный поток Ф образуется совместным действием взаимно неподвижных н. с. 
В результате взаимодействия потока Ф с током обмотки якоря возникает электромагнитный момент М=ФIсоsj, где I=Iа=Iв=Iс, j— угол сдвига по фазе между напряжением  и током
и током  генератора. В генераторном режиме электромагнитный момент действует навстречу внешнему вращающемуся моменту, т, е. является тормозящим.
генератора. В генераторном режиме электромагнитный момент действует навстречу внешнему вращающемуся моменту, т, е. является тормозящим.
При работе синхронной машины в качестве двигателя обмотка статора подключается к трехфазной сети переменного тока, а обмотка ротора — к источнику постоянного тока. Обмотка статора создает вращающееся магнитное поле. В результате взаимодействия этого поля с полем обмотки возбуждения возникает электромагнитный вращающий момент, под действием которого ротор вращается с синхронной скоростью W. В установившемся режиме электромагнитный момент уравновешивается вешним тормозящим механическим моментом.
Равенство частот вращения магнитного поля и ротора принципиально характерно для рассматриваемых машин и послужило причиной наименования их синхронными.
Явнополюсная синхронная машина может работать как в режиме генератора, так и в режиме двигателя при отсутствии обмотки возбуждения, когда поток Ц создается только обмоткой статора. Такие машины называют синхронными реактивными машинами.
Примечания: 1. Обмотку переменного тока синхронной машины называют также обмоткой якоря, или якорной обмоткой, а часть машины, на которой уложена эта обмотка, — якорем. Магнитную систему, на которой располагается обмотка возбуждения, называют также индуктором.
Наиболее распространено такое исполнение синхронных машин, когда якорь является внешней частью машины и он неподвижен, а индуктор вращается. Однако машины малой мощности иногда выполняют с неподвижным внешним индуктором и вращающимся якорем.

5 Вращающееся магнитное поле. Работа многофазных () машин переменного тока основана на явлении вращающегося магнитного поля, которое заключается в том, что при протекании по сдвинутым в пространстве фазам многофазной обмотки токов, взаимно сдвинутых во времени, образуется вращающееся магнитное поле.

Одному периоду изменения магнитного поля в воздушном зазоре соответствует полный электрический угол, равный 360 эл. град, или два полюсных деления основной гармонической магнитного поля. Под основной гармонической магнитного поля обычно понимается гармоническая составляющая магнитной индукции в воздушном зазоре машины, имеющая наибольшую амплитуду по сравнению с другими гармоническими. Число полюсов обмотки 2р равно удвоенному числу периодов поля р. Следовательно, полюсное деление или t=180 эл. град. В машине с 2р полюсами полному геометрическому углу 360° соответствуют с полных электрических углов, или 360 эл. град. Таким образом, 1°=р эл. град.
На рис. 16-5 показана простейшая трехфазная (m=3) двухполюсная (2р=2) обмотка якоря, каждая фаза которой состоит из одного витка (об обмотках — см. раздел). Расстояние между проводниками, образующими один виток, равно полюсному делению. Нормально обмотки фаз в пространстве, а токи фаз во времени должны быть взаимно сдвинуты на угол 360/га. эл. град (условие образования кругового вращающегося поля). Взаимный сдвиг фаз обмотки на рис. 16-5 равен 360/m эл. град = 120 эл. град или, поскольку обмотка двухполюсная, 120 геом. град. На рис. 16-5, б показаны направления токов в проводниках обмотки в исходный момент времени (t=0), когда  (за положительное условно принято направление тока в начальных проводниках фаз А, В, С за плоскость рисунка). На рис. 16-5,6 показаны направления токов в проводниках через четверть периода
(за положительное условно принято направление тока в начальных проводниках фаз А, В, С за плоскость рисунка). На рис. 16-5,6 показаны направления токов в проводниках через четверть периода  ,когда
,когда  , а на рис. 16-5, в еще через четверть периода (t=1/2T), когда
, а на рис. 16-5, в еще через четверть периода (t=1/2T), когда  (мгновенные значения токов фаз определяются как проекции амплитудных векторов токов фаз на вертикальную ось).
(мгновенные значения токов фаз определяются как проекции амплитудных векторов токов фаз на вертикальную ось).
Из рис. 16-5 видно, что обмотка создает двухполюсный магнитный поток, вращающийся в пространстве в направлении чередования фаз (А—В—С). За один период Ф изменения тока частоты f поле поворачивается на 360 эл. град, или на 2t. Следовательно, n [об/с] =f [Гц].
2р-полюсная обмотка создает 2р-полюсный магнитный поток, вращающийся в пространстве с частотой, в p раз меньшей, чем поток двухполюсной обмотки, при одинаковой частоте тока.
В общем случае механическая угловая скорость вращения поля W=2pn, где n=f/p, об/с, или n=60f/p, об/мин.
Рис. 16-5. Образование вращающегося магнитного поля.
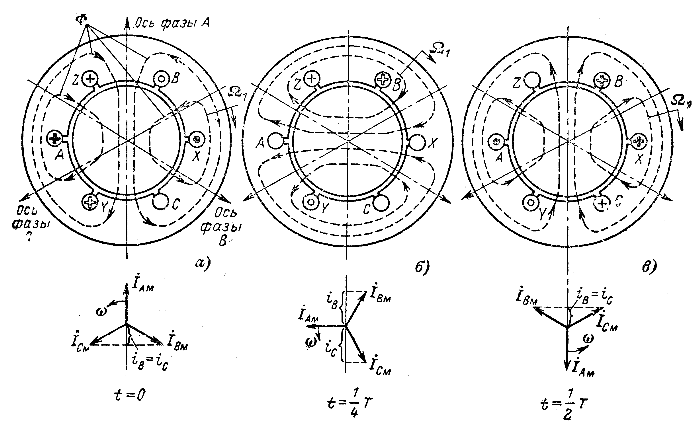
Таблица 16-1 Частоты вращения поля при f=50 Гц
Обмотки статора и ротора электрических машин переменного тока
Обмотка электротехнического изделия (устройства) — совокупность определенным образом расположенных и соединенных витков или катушек, предназначенная для создания или использования магнитного поля, или для получения заданного значения сопротивления электротехнического изделия (устройства). Катушка обмотки электротехнического изделия (устройства) — обмотка электротехнического изделия (устройства) или ее часть, выполненные в виде отдельной конструктивной единицы (ГОСТ 18311-80).
В статье рассказано про устройство обмоток статора и ротора электрических машин переменного тока.
Пространственное расположение обмоток статора:
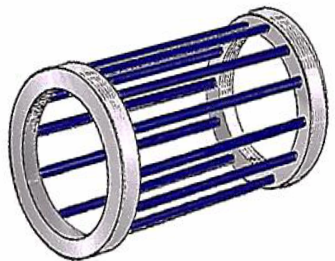
Ротор типа «беличья клетка»:
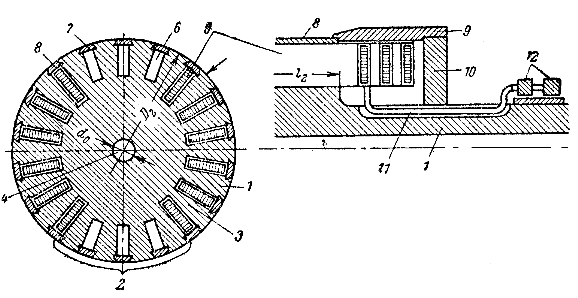
Статор с двенадцатью пазами, в каждый из которых уложено по одному проводнику, схематично показан на рис. 1, а. Соединения между проводниками, уложенными в пазах, указаны только для одной из трех фаз; начала фаз А, В, С обмотки обозначены С1, С2, С3; концы — С4, С5, С6. Части обмотки, уложенные в пазах (активная часть обмотки), условно показаны в виде стержней, а соединения между проводниками, находящимися в пазах (лобовые соединения),— сплошной линией.
Сердечник статора имеет вид полого цилиндра, представляющего собой пакет или ряд пакетов (разделенных вентиляционными каналами) из листов электротехнической стали. Для машин малой и средней мощности каждый лист штампуется в виде кольца с пазами вдоль внутренней окружности. На рис. 1,б дан лист статора с пазами одной из применяемых форм.
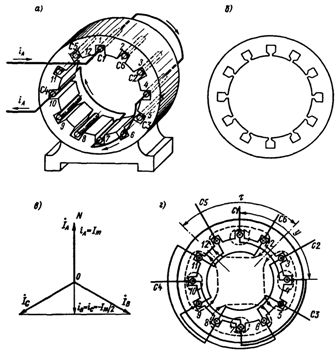
Рис. 1. Расположение обмотки в пазах статора и распределение токов в проводниках
Пусть мгновенное значение тока iA первой фазы в некоторый момент времени максимально и ток направлен от начала С1 фазы к ее концу С4. Будем считать такой ток положительным.
Определяя мгновенные токи в фазах как проекции вращающихся векторов на неподвижную ось ON (рис. 1, в), получим, что токи фаз В и С в данный момент времени отрицательны, т. е. направлены от концов фаз к началам.
Проследим по рис. 1, г образование вращающегося магнитного поля. В рассматриваемый момент времени ток фазы А направлен от ее начала к концу, т. е. если в проводниках 1 и 7 он идет от нас за плоскость чертежа, то в проводниках 4 и 10 он идет из-за плоскости чертежа к нам (см. рис. 1, а и г).
В фазе В ток в этот момент времени идет от конца фазы к ее началу. Соединив проводники второй фазы по образцу первой, можно получить, что ток фазы В проходит по проводникам 12, 9, 6, 3; при этом по проводникам 12 и 6 ток идет от нас за плоскость чертежа, а по проводникам 9 и 3 — к нам. Картину распределения токов в фазе С получим по образцу фазы В.
Направления токов даны на рис. 1,г; штриховыми линиями показаны магнитные линии поля, создаваемого токами статора; направления линий определены по правилу правого винта. Из рисунка видно, что проводники образуют четыре группы с одинаковыми направлениями тока и число полюсов 2р магнитной системы получается равным четырем. Участки статора, где магнитные линии выходят из него, представляют собой северные полюсы, а участки, где магнитные линии входят в статор, — южные полюсы. Дуга окружности статора, занятая одним полюсом, называется полюсным делением.
Магнитное поле в различных точках окружности статора различно. Картина распределения магнитного поля вдоль окружности статора повторяется периодически через каждое двойное полюсное деление. Угол дуги 2 принимается за 360 электрических градусов. Так как вдоль окружности статора размещается р двойных полюсных делений, то 360 геометрических градусов равны 360р электрическим градусам, а один геометрический градус равен р электрическим градусам.
На рис. 1, г показаны магнитные линии для некоторого фиксированного момента времени. Если же рассмотреть картину магнитного поля для ряда последовательных моментов времени, можно убедиться в том, что поле вращается с постоянной скоростью.
Найдем скорость вращения поля. По истечении времени, равного половине периода переменного тока, направления всех токов изменяются на обратные, поэтому магнитные полюсы меняются местами, т. е. за половину периода магнитное поле поворачивается на часть оборота. Скорость вращения магнитного поля статора, т. е. синхронная скорость, равна (в оборотах в минуту)

Число р пар полюсов может быть только целым, поэтому при частоте, например, 50 Гц синхронная скорость может равняться 3000; 1500; 1000 об/мин и т. д.
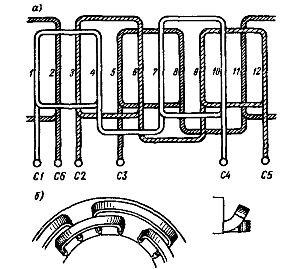
Рис. 2. Развернутая схема трехфазной однослойной обмотки
Обмотки машин переменного тока можно разделить на три группы:
К специальным обмоткам относятся:
а) короткозамкнутая обмотка в виде беличьей клетки;
б) обмотка асинхронного двигателя с переключением на разные числа полюсов;
в) обмотка асинхронного двигателя с противосоединеннями и т. д.
Кроме вышеуказанного деления, обмотки отличаются по ряду других признаков, а именно:
1) по характеру исполнения — ручные, шаблонные и полушаблонные;
2) по расположению в пазу — однослойные и двухслойные;
3) по числу пазов на полюс и фазу — обмотки с целым числом q пазов на полюс и фазу и обмотки с дробным числом q .
Витком называется контур, образованный двумя последовательно соединенными проводниками. Секция, или катушка, представляет собой ряд последовательно соединенных витков, лежащих в двух пазах и имеющих общую изоляцию от корпуса.
Секция имеет две активные стороны. Левую активную сторону называют началом секции (катушки), а правую — концом секции. Расстояние между активными сторонами секции называют шагом секции. Его можно измерять или числом зубцовых делений или в долях полюсного деления.
Шаг секции называют диаметральным, если он равен полюсному делению и сокращенным, если он меньше полюсного деления, так как шаг секции больше полюсного деления не делают.
Характерной величиной, определяющей выполнение обмотки, является число пазов на полюс и фазу, т. е. число пазов, занимаемых обмоткой каждой фазы в пределах одного полюсного деления:

где z— число пазов статора.
Обмотка, приведенная на рис. 1, а, имеет следующие данные:

Даже для этой простейшей обмотки пространственный чертеж проводников и их соединений получается сложным, поэтому он обычно заменяется развернутой схемой, где проводники обмотки изображаются расположенными не на цилиндрической поверхности, а на плоскости (цилиндрическая поверхность с пазами и обмоткой «развертывается» в плоскость). На рис. 2, а дана развернутая схема рассмотренной обмотки статора.
На предыдущем рисунке было для простоты показано, что часть фазы А обмотки, уложенная в пазах 1 и 4, состоит всего из двух проводников, т. е. из одного витка. В действительности же каждая такая часть обмотки, приходящаяся на один полюс, состоит из w витков, т. е. в каждой паре пазов помещается по w проводников, объединенных в одну катушку. Поэтому при обходе по развернутой схеме, например, фазы А от паза 1 нужно w раз обойти пазы 1 и 4, прежде чем перейти к пазу 7. Расстояние между сторонами витка одной катушки, или шаг обмотки, у показан на рис. 1, г; он обычно выражается в числах пазов.
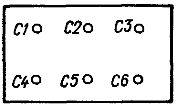
Рис. 3. Щиток асинхронной машины
Приведенная на рис. 1 и 2 обмотка статора называется однослойной, так как она укладывается в каждом пазу в один слой. Для того чтобы разместить лобовые части, пересекающиеся на плоскости, их изгибают по разным поверхностям (рис. 2, б). Однослойные обмотки выполняются с шагом, равным полюсному делению (рис. 2, а), или этот шаг равен в среднем полюсному делению для разных катушек одной фазы, если y > 1 , y < 1 . В настоящее время более распространены двухслойные обмотки.
Начало и конец каждой из трех фаз обмотки выводятся на щиток машины, где имеется шесть зажимов (рис. 3). К верхним зажимам C1, С2, СЗ (начала фаз) подводятся три линейных провода от трехфазной сети. Нижние зажимы С4, С5, С6 (концы фаз) либо соединяются в одну точку двумя горизонтальными перемычками, либо каждый из этих зажимов соединяется вертикальной перемычкой с лежащим над ним верхним зажимом.
В первом случае три фазы статора образуют соединение звездой, во втором — треугольником. Если, например, одна фаза статора рассчитана на напряжение 220 В, то линейное напряжение сети, в которую включается двигатель, должно быть 220 В в случае включения статора треугольником; при включении его звездой линейное напряжение сети должно быть
При соединении статора звездой нейтральный провод не подводится, так как двигатель является для сети симметричной нагрузкой.
Ротор асинхронной машины набирается из штампованных листов изолированной электротехнической стали на валу или на специальной несущей конструкции. Радиальный зазор между статором и ротором делается возможно меньшим для обеспечения малого магнитного сопротивления на пути магнитного потока, пронизывающего обе части машины.
Наименьший зазор, допустимый по технологическим требованиям, составляет от десятых долей миллиметра до нескольких миллиметров в зависимости от мощности и габаритов машины. Проводники обмотки ротора располагают в пазах вдоль образующих ротора непосредственно у его поверхности с тем, чтобы обеспечить наибольшую связь обмотки ротора с вращающимся полем.
Асинхронные машины выпускаются как с фазным, так и с короткозамкнутым ротором.

Рис. 4. Фазный ротор
Фазный ротор имеет, как правило, трехфазную обмотку, выполняемую, подобно статорной, с тем же числом полюсов. Обмотка соединяется звездой или треугольником; три конца обмотки выводятся на три изолированных контактных кольца, вращающихся вместе с валом машины. Через щетки, укрепленные на неподвижной части машины и скользящие по контактным кольцам, в ротор включается трехфазный пусковой или регулировочный реостат, т. е. в каждую фазу ротора вводится активное сопротивление. Внешний вид фазного ротора представлен на рис. 4, на левом конце вала видны три контактных кольца. Асинхронные двигатели с фазным ротором применяются там, где требуется плавное регулирование скорости приводимого в движение механизма, а также при частых пусках двигателя под нагрузкой.
Конструкция короткозамкнутого ротора значительно проще, чем фазного. Для одной из конструкций на рис. 5, а показана форма листов, из которых набирается сердечник ротора. При этом отверстия вблизи наружной окружности каждого листа составляют в сердечнике продольные пазы. В эти пазы заливается алюминий, после его затвердения в роторе образуются продольные токопроводящие стержни. По обоим торцам ротора заодно отливаются алюминиевые кольца, замыкающие накоротко алюминиевые стержни. Полученная при этом токопроводящая система обычно называется беличьей клеткой.
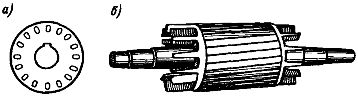
Рис. 5. Короткозамкнутый ротор
Короткозамкнутый ротор с беличьей клеткой представлен на рис. 5,б. На торцах ротора видны вентиляционные лопатки, отливаемые заодно с короткозамыкающими кольцами. В данном случае пазы скошены на одно пазовое деление вдоль ротора. Беличья клетка проста, не имеет скользящих контактов, поэтому трехфазные асинхронные двигатели с короткозамкнутым ротором наиболее дешевы, просты и надежны; они наиболее распространены.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя — зависимости потребляемого тока I1 и мощности Р1, КПД, cos φ и скольжения s от полезной механической мощности P2. Эти характеристики определяются при постоянном напряжении U1 и частоте f1 сети.
Рабочие характеристики асинхронного двигателя могут быть получены экспериментально (опытным путем) и рассчитаны с помощью схемы замещения.
Ниже приводится расчет рабочих характеристик асинхронного двигателя по схеме замещения.
По обмотке статора асинхронной машины протекает многофазная система токов, обычно трехфазная, которая создает в воздушном зазоре машины вращающееся магнитное поле (магнитный поток Ф).
Вращающееся магнитное поле в свою очередь индуктирует (наводит) в проводниках обмотки ротора ЭДС, под действием которой в замкнутой накоротко обмотке ротора протекает ток I2. Этот ток, взаимодействуя с магнитным потоком Ф, создает механическую силу, стремящуюся привести ротор во вращение в сторону вращения магнитного поля.
Определим, с какой частотой вращения магнитное поле машины пересекает проводники ротора. Эта частота равна, об/мин:
Определим частоту ЭДС f2, которая наводится магнитным полем асинхронной машины в проводниках ротора, Гц:
Если учесть, что n2=n1s [см. формулу (9)], то можно записать
Из формулы (11) видно, что если ротор машины неподвижен (n=0, s=l), то частота ЭДС, наводимой в роторе, равна частоте сети. По мере увеличения частоты вращения ротора ЭДС понижается и при синхронной частоте будет равна нулю. На рис. 13 показаны изменения скольжения, частоты и ЭДС в роторе в зависимости от частоты вращения ротора.
Рис. 13. Зависимость скольжения s, частоты f2 и ЭДС, наводимой в роторе, E2 от частоты вращения асинхронного двигателя n
Из закона электромагнитной индукции следует, что при гармоническом изменении магнитного поля наводимая в обмотке ЭДС равна:
где f — электрическая частота, Гц; w — число последовательно соединенных витков фазы; kоб — обмоточный коэффициент; Фmax — максимальное значение рабочего потока, сцепленного с обмоткой, Вб.
Знание частоты f2 в роторе дает возможность определить ЭДС ротора Е2 при произвольной частоте вращения (скольжении), В, в виде
где w2 — число последовательно соединенных витков обмотки ротора; kоб2 — обмоточный коэффициент ротора.
Подстановка f2 из формулы (11) дает, В,
где Е2 — ЭДС, наводимая в неподвижной обмотке ротора потоком Фmax, В.
Осветим теперь важный для анализа работы асинхронных двигателей вопрос о зависимости вращающегося магнитного потока двигателя от режима работы машины. Для этого, чтобы представить себе эту зависимость, определим вначале, какую ЭДС Е1 наводит этот поток в каждой фазе обмотки статора, В:
где w1 — число витков одной фазы статора; kоб1 —обмоточный коэффициент обмотки статора.
Напряжение U1, приложенное к статору, уравновешивается ЭДС E1 и падением напряжения I1z1 на внутреннем сопротивлении z1=r1+jx1 обмотки статора (х1— индуктивное сопротивление обмотки, определяемое потоком рассеяния) . При изменении нагрузки двигателя от нуля (холостой ход) до номинальной падение напряжения составляет 5—10 % приложенного. Таким образом, с достаточной для качественного анализа точностью можно полагать, что напряжение U1 полностью компенсируется ЭДС Е1 т. е. .
Учитывая формулу (15), нетрудно заключить, что ЭДС и вращающийся магнитный поток двигателя зависят от приложенного к двигателю напряжения. При постоянном напряжении поток Фmах остается приблизительно постоянным независимо от изменения нагрузки двигателя.
Рассмотрим вначале явления, происходящие в машине с заторможенным ротором и замкнутой накоротко обмоткой ротора. Асинхронный двигатель в этом режиме подобен трансформатору с короткозамкнутой вторичной обмоткой. Отличие состоит в том, что вторичная магнитная цепь отделена от первичной воздушным зазором, первичная обмотка (статора) и вторичная обмотка (ротора) равномерно распределены по окружности, а магнитное поле вращающееся.
Как видно из формулы (14) и рис. 13, ЭДС, наводимая в обмотке ротора, когда он неподвижен, является максимальной. В силу этого и ток, проходящий по обмоткам статора и ротора, также будет наибольшим. Этот режим называется режимом короткого замыкания (КЗ). Ток статора в этом режиме называется током короткого замыкания и превышает его номинальный ток в 4—7 раз. Асинхронный двигатель в таких условиях нельзя длительно оставлять под полным напряжением из-за перегрева обмоток, который может привести к аварии.
Для определения тока короткого замыкания двигателя делают опыт КЗ. Этот опыт заключается в том, что к двигателю с заторможенным (неподвижным) ротором подводят пониженное напряжение, регулируя которое, устанавливают номинальный ток. Напряжение, подводимое к двигателю в опыте КЗ, оказывается малым (15— 20%) по сравнению с номинальным. На базе этого опыта можно в безопасных для двигателя условиях определить величину тока короткого замыкания /к при номинальном напряжении, А:
где Uном — номинальное напряжение, В; Uк — напряжение в опыте КЗ при номинальном токе, В; Iном — номинальный ток, А.
Замеряя в этом опыте по ваттметру мощность короткого замыкания Рк, подводимую к одной фазе двигателя, находят также коэффициент мощности в режиме КЗ
и эквивалентное активное сопротивление статора и ротора двигателя гк в режиме КЗ на одну фазу, Ом,
Это эквивалентное активное сопротивление равно сумме активного сопротивления статора и приведенного активного сопротивления ротора. Понятие о приведенном активном и реактивном сопротивлении ротора будет дано ниже.
Определив угол φк по значению cosφк из формулы (18), легко найти и эквивалентное реактивное сопротивление двигателя в режиме короткого замыкания, Ом:
Индуктивное сопротивление хк равно сумме индуктивного сопротивления статора и приведенного индуктивного сопротивления ротора.
Поскольку частота вращения ротора двигателя в этом режиме равна нулю, его механическая мощность также равна нулю. Потери в стали во время опыта короткого замыкания очень малы, так как мал вращающийся магнитный поток. Поэтому мощность Рк, которая подводится к машине, почти вся идет на нагрев проводников обмоток статора и ротора. То же самое можно сказать о режиме КЗ при полном напряжении.
Теперь представим себе, что обмотка ротора разомкнута, а обмотка статора включена в сеть. Ток по роторной обмотке при этом не проходит и асинхронный двигатель подобен трансформатору, но уже в режиме холостого хода (XX). Так как ток в проводниках ротора отсутствует, то механическая сила не возникает и ротор остается неподвижным.
По обмотке статора при этом проходит ток холостого хода I0, который создает магнитодвижущую силу (МДС), необходимую для создания магнитного потока Фmax. Поскольку в магнитной цепи асинхронного двигателя имеется зазор, то для создания магнитного потока требуется относительно больший ток, чем в трансформаторе. В двигателях большой и средней мощности ток XX составляет 25—35, а в двигателях малой мощности — 35—60% номинального тока.
Наводимая в неподвижном роторе ЭДС может быть определена по формуле (14), если учесть, что скольжение в этом режиме равно 1. Отношение ЭДС в обмотке статора к ЭДС в обмотке ротора называется коэффициентом трансформации ЭДС и может быть определено по формуле
Мощность, потребляемая двигателем в режиме XX при неподвижном роторе, расходуется на потери в проводниках статора двигателя, потери на перемагничивание и вихревые токи в стали статора и в стали ротора.
Важно заметить, что режим XX при неподвижном роторе очень близок к режиму, который возникает, когда асинхронный двигатель не выполняет полезной работы и вращается на холостом ходу. В этом случае частота вращения ротора двигателя почти равна синхронной, а скольжение примерно равно нулю [см. формулы (4), (9) и рис. 13]. Электродвижущая сила в роторе будет близкой к нулю, и, следовательно, подобно режиму XX при неподвижном роторе практически равен нулю ток в роторе. При холостом ходе вращающегося двигателя ток в обмотке статора, как и в случае холостого хода неподвижного двигателя, определяется в основном МДС, необходимой для создания магнитного потока Фmax.
При вращении ротора в двигателе появляются потери, которых нет в случае неподвижного ротора; это механические потери на трение и вентиляционные. Однако когда частота вращения ротора примерно равна синхронной, исчезают потери в стали ротора двигателя, поскольку магнитное поле теперь очень медленно перемещается относительно ротора и его сталь почти не перемагничивается. Таким образом, потери и, следовательно, мощность в двух режимах холостого хода оказываются близкими.
Асинхронная машина в режиме холостого хода может быть представлена схемой замещения, показанной на рис. 14. Для определения параметров и характеристик двигателя помимо опыта КЗ выполняют опыт XX, во время которого замеряют ток обмотки статора I0 (А) и потребляемую мощность Р0 (Вт). Это позволяет определить сопротивления в схеме замещения двигателя на холостом ходу, а также коэффициент мощности XX:
Рис. 14. Схема замещения первичной цепи (статора) асинхронного двигателя, работающего в режиме холостого хода
Перейдем теперь к рассмотрению общего случая режима нагрузки, когда ротор вращается с частотой, меньшей частоты XX. Определим, какой ток будет проходить по обмотке ротора во всем диапазоне рабочих режимов. Наводимая вращающимся магнитным потоком ЭДС в обмотке ротора зависит при постоянном напряжении только от скольжения и может быть найдена по (14). Ток ротора будет, очевидно, зависеть от ЭДС, наводимой в роторе, и сопротивления обмотки ротора, при этом полное сопротивление цепи в случае переменного тока определяется не только активным сопротивлением проводников обмотки, но и ее индуктивным сопротивлением. Индуктивное сопротивление обмотки ротора изменяется так же, как и ЭДС ротора E2s, Ом:
где L2 — индуктивность обмотки ротора, Гн; х2— индуктивное сопротивление рассеяния обмотки неподвижного ротора при s=l, Ом.
Теперь, используя закон Ома для цепей переменного тока, найдем ток ротора, А:
Учитывая (14) и (23), формулу (24) можно записать иначе:
Таким образом, можно видеть, что при скольжении, равном нулю или близком к нему (это соответствует синхронной или близкой к синхронной частоте вращения ротора), ток ротора равен нулю или очень мал. Это совпадает с тем, что было сказано выше относительно режима XX при вращающемся роторе. По мере уменьшения частоты вращения двигателя, т. е. при увеличении скольжения, ток возрастает за счет увеличения ЭДС ротора, однако рост тока ограничивается увеличением индуктивного сопротивления ротора.
Если разделить числитель и знаменатель выражения (25) для тока ротора I2 на s, то получим следующую формулу:
Из этого следует, что если мы примем, что ротор неподвижен, а его активное сопротивление меняется обратно пропорционально скольжению, то по его обмотке будет проходить точно такой же ток, как и при вращающемся роторе. Удобство такого преобразования состоит в том, что оно позволяет вместо вращающегося ротора (вращающаяся вторичная электрическая цепь) рассматривать неподвижный ротор (неподвижная вторичная цепь).
Однако изучение процессов, происходящих в асинхронной машине, и расчет ее характеристик можно сделать более удобными, если заменить реальную обмотку ротора эквивалентной с числом витков в фазе и числом фаз, равным им у первичной обмотки (обмотки статора), т. е. вместо обмотки ротора с числом фаз m2, числом витков в фазе w2 и обмоточным коэффициентом kоб2 будем полагать, что обмотка ротора имеет число фаз ти число витков в фазе w1 и обмоточный коэффициент kоб1. Эта замена называется приведением обмотки ротора к обмотке статора. Нетрудно видеть, что магнитный поток Ф в этом случае будет наводить в эквивалентной (приведенной) обмотке ротора ЭДС, равную ЭДС обмотки статора E2‘=E1 (штрихом будем обозначать приведенные величины).
Замена обмотки ротора не должна привести к изменению потребляемой мощности, потерь, магнитодвижущей силы и фазы тока обмотки. Из этого условия определяются приведенные величины тока, активного и индуктивного сопротивлений обмотки ротора .
В соответствии с (13) имеем, В
Из формул (27) вытекает отношение между ЭДС приведенной и реальной обмоток заторможенного ротора, которое называется коэффициентом трансформации ЭДС или напряжений. Он равен:
Из условия неизменности магнитодвижущих сил F2‘ =F2 следует, что
откуда вытекает отношение между токами, которое называется коэффициентом трансформации токов. Он равен:
Из условия неизменности потерь в обмотке ротора при приведении следует, что
где kr=kIkU — коэффициент приведения сопротивлений.
Из условия неизменности фазы тока обмотки ротора следует
Процесс приведения цепи ротора показан на рис. 15. От схемы замещения обмотки вращающегося ротора (рис. 15,а) переходим к схеме замещения неподвижного ротора (рис. 15,б), а затем приводим обмотку ротора к обмотке статора (рис. 15, в).
Рис. 15. Схемы замещения: а — обмотки вращающегося ротора; б — неподвижного ротора; в — обмотки ротора, приведенной к обмотке статора
Поскольку теперь ЭДС Е1 первичной обмотки равна ЭДС Е2‘ вторичной обмотки, мы можем соединить электрически соответствующие точки схемы замещения обмотки статора и ротора. В результате получим схему замещения асинхронного двигателя, показанную на рис. 16. Здесь активное сопротивление rm отражает наличие потерь в стали двигателя. Для двигателей средней и большой мощности удобнее пользоваться упрощенной схемой замещения, приведенной на рис. 17.
Рис. 16. Т-образная схема замещения асинхронного двигателя
Рис. 17. Упрощенная Г-образная схема замещения асинхронного двигателя
Используя последнюю схему, легко найти токи и ЭДС в обмотках, подводимую и полезную мощность, а также мощность потерь при любой частоте вращения двигателя. Для этого следует лишь найти скольжение, соответствующее заданной частоте n, по формуле (4) и вычислить сопротивление r2‘/s в схеме по рис. 17. После этого нетрудно найти ток намагничивания I0 и приведенный ток I2‘ в роторной цепи, А:
Это дает возможность вычислить электрические потери в обмотке статора трехфазного двигателя (m1=3), Вт:
Электрические потери в обмотке ротора (Вт) можно найти, предварительно рассчитав по (30) приведенное сопротивление ротора r2‘ (Ом):
Суммарная активная мощность, передаваемая со статора на ротор, как видно из схемы (рис. 17), будет равна, Вт:
Эта мощность передается на ротор электромагнитным путем и поэтому называется электромагнитной мощностью.
Если из электромагнитной мощности вычесть мощность электрических потерь в обмотке ротора, то получим полную механическую мощность двигателя, Вт:
Полная механическая мощность расходуется на вращение приводного механизма (полезная механическая мощность) и на покрытие механических Рмх.п и добавочных Рд.п потерь самого двигателя. Поэтому полезная механическая мощность Р2 будет равна, Вт:
Коэффициент полезного действия двигателя по определению равен отношению отдаваемой (полезной механической) мощности к потребляемой (активной электрической) мощности. Разность между этими мощностями составляют потери в двигателе, равные, Вт:
где Pм.п=m1I02rm — магнитные потери или потери в стали. Таким образом, КПД двигателя равен:
Использование первого или второго выражения для КПД определяется тем, какая из мощностей — P1 или Р2— известна. На практике наиболее часто применяется первое выражение (38).
Используя схему замещения, можно определить также ток, потребляемый двигателем из сети, т. е. ток статора, который равен сумме двух токов. Первый из них — это ток XX, который протекает по цепи 1 (рис. 17) и не изменяется при изменении частоты вращения ротора, второй — ток ротора I2‘, который определяется по (32). Складывая геометрически эти два тока, можно получить ток статорной обмотки. Такое геометрическое сложение показано на рис. 18. Углы φ2‘, φ0, необходимые для построения, можно найти с помощью схемы замещения (см. рис. 17):
Таким образом, знание параметров схемы замещения (r1, x1, r2‘, х2‘, rm, хm) и приложенного напряжения U1 (напряжение сети) позволяет с помощью приведенных выше формул определить полезную мощность, токи, потери, КПД, коэффициент мощности двигателя при различных скольжениях (частоте вращения).
Рис. 18. Диаграмма токов асинхронного двигателя
Зависимости потребляемого тока I1 и мощности Р1, КПД, cosφ и скольжения s от полезной механической мощности P2 носят название рабочих характеристик двигателя. Эти характеристики определяются при постоянном напряжении U1 и частоте f1 сети. Пример рабочих характеристик приведен на рис. 19.
Рис. 19. Рабочие характеристики асинхронного двигателя
Рассмотрим рабочие характеристики асинхронного двигателя . При холостом ходе (полезная мощность Р2—0) скольжение s также равно нулю (частота вращения ротора n практически равна синхронной), сопротивление r2/’s равно бесконечности (см. рис. 17) и ток I2‘==0. По обмотке статора протекает ток холостого хода I0. Коэффициент полезного действия η равен нулю, так как равна нулю полезная мощность Р2, а коэффициент мощности равен коэффициенту мощности для тока холостого хода (cosφ1=cosφ0).
При увеличении нагрузки частота вращения ротора уменьшается и увеличивается скольжение s. За счет увеличения s уменьшается сопротивление цепи 2 (см. рис. 17) и увеличивается ток ротора, а следовательно, и ток статоpa. Поскольку увеличивается полезная мощность, растет, КПД двигателя, а также коэффициент мощности.
Обычно номинальная мощность на валу двигателя достигается уже при небольшом понижении частоты вращения ротора и вся область рабочих режимов находится в диапазоне скольжений от 0 до 2—5%.
Поэтому скоростная характеристика n=f(P2) у асинхронного двигателя имеет небольшой наклон к оси абсцисс. Характеристики такого вида принято называть жесткими. Соответственно характеристика s=f(P2) имеет слабый подъем при возрастании нагрузки. В асинхронном двигателе частота вращения ротора меньше частоты вращения поля, за счет чего обеспечивается наведение ЭДС, а также создание тока 1% в обмотке ротора и вращающего электромагнитного момента, под действием которого ротор приходит во вращение.
Характеристика cosφ=f(P2) лежит в области значений, меньших 1, так как асинхронный двигатель всегда потребляет ток I0, почти не зависящий от нагрузки в диапазоне мощностей от Р0 до Р2≈Рном. При XX обычно φ02≈Р2ном. При увеличении нагрузки выше номинальной cosφ несколько снижается.
Коэффициент полезного действия достигает своего максимального значения при Р2≈ (0,6÷0,8)Р2ном и снижается при дальнейшем росте нагрузки. Поскольку двигатель обычно работает при переменной нагрузке, изменяющейся в пределах (0,6—1)Р2ном, то КПД в этом диапазоне изменения нагрузки должен быть достаточно высок.
Обмотки машин переменного тока
Обмотка машины является очень существенной частью, так как в ней создаётся э. д. с. и происходит процесс преобразования энергии. В зависимости от назначения, мощности и условий работы машины обмотки имеют различное конструктивное устройство. В машинах переменного тока используются следующие основные типы обмоток: 1) катушечные, 2) стержневые, 3) специальные. Катушечные обмотки изготовляют из изолированного медного или алюминиевого провода круглого поперечного сечения, стержневые и специальные – из шин прямоугольного поперечного сечения. Специальные обмотки применяют для короткозамкнутых обмоток роторов асинхронных двигателей, для пусковых и успокоительных обмоток синхронных машин, для одноякорных преобразователей и т. д.
Конструктивно обмотки могут быть выполнены в зависимости от расположения их в пазах однослойными и двухслойными, в зависимости от их изготовления – ручными и шаблонными, в зависимости от числа пазов на полюс и фазу q – с целым и с дробным числом. В машинах переменного тока преимущественно применяют двухслойные обмотки. В машинах малой мощности используют однослойную обмотку , изготовление которой встречает затруднения. При однослойном расположении активных проводников в пазах лобовые соединения, находящиеся на торцовых сторонах статора или ротора, окажутся лежащими в одной плоскости, что делает невозможным выполнение шаблонной обмотки.
Катушки одной фазы однослойной обмотки состоят из активных проводников, отстоящих один от другого на расстоянии шага обмотки, примерно равного полюсному делению, т.е. расстоянию между центрами разноимённых полюсов. Также, в однослойной обмотке лобовые соединения могут находиться в различных плоскостях, если изменён порядок соединения активных проводников.
Однако при такой обмотке катушки имеют различную величину, а, следовательно, требуется несколько шаблонов для изготовления такой обмотки.
В двухслойных обмотках активный проводник, расположенный в верхнем слое паза, соединяется с проводником, расположенным в нижнем слое паза, который отстоит от начального на расстоянии y. При такой обмотке лобовые соединения не пересекаются и находятся в различных плоскостях, что даёт возможность выполнить шаблонную обмотку при одинаковых размерах и форме катушек. Обмотки могут быть однофазными и многофазными. Наиболее широкое применение нашли трёхфазные обмотки . Мощность трёхфазной машины в 1, 5 раза больше мощности однофазной при одинаковых габаритах и потери энергии.
Эта обмотка состоит из трёх одинаковых катушек, оси которых сдвинуты в пространстве на 120 градусов. При вращении магнита с полюсами N и S в этих катушках будут индуктированы э. д. с., равные по величине и сдвинутые по фазе на 1/3 периода. Обмотки, в которых фаза состоит из одной катушки, не находят применения. На практике получили распространение распределённые обмотки, в которых витки, принадлежащие одной фазе, равномерно распространены между несколькими парами пазов. При такой обмотке форма кривой магнитной индукции в пространстве ближе к синусоиде. Однако в распространённых обмотках происходит некоторое уменьшение э. д. с. Это объясняется тем, что оси катушек, последовательно включенных в одну фазу, не совпадают, а следовательно, не совпадают по фазе э. д. с., индуктированные в этих катушках. Э. д. с. фазы катушек, которая окажется меньше арифметической суммы этих э. д. с.
Для улучшения формы кривой э. д. с. обмотки машин переменного тока выполняет с шагом, меньшим полюсного деления ( с укороченным шагом). Однако укорочение шага обмотки также приводит к некоторому уменьшению э. д. с., так как в том случае катушки обмотки пронизываются не всем потоком полюса, а только частью его. Таким образом, действующее значение э. д. с. фазы машины переменного тока
Е=4,44К0wfФm,
Где К0 – обмоточный коэффициент (меньше единицы), учитывающий уменьшение э. д. с. машины за счёт распределения обмотки и укорочения шага её,
w — число витков одной фазы обмотки, равное произведению числа витков одной катушки на число последовательно соединённых катушек.
Устройство асинхронного двигателя
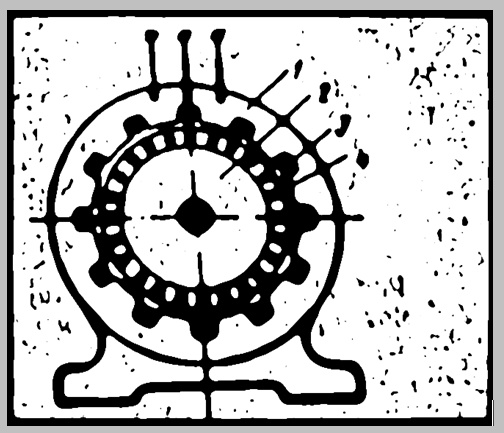
Схема устройства асинхронного двигателя:
1 – статор, 2 – ротор , 3 — обмотка статора, 4 – обмотка ротора
Сердечник статора набирается из стальных пластин толщиной 0,35 или 0,5 мм. Пластины штампуют со впадинами (пазами), изолируют лаком, окалиной или тонкой бумагой для уменьшения потерь на вихревые токи, собирают в отдельные пакеты и крепят в станине двигателя. К станине прикрепляют также боковые щиты с помещёнными на них подшипниками, на которые опирается вал ротора. Станину устанавливают на фундаменте.
В продольные пазы статора укладывают проводники его обмотки, которые соответствующим образом соединяют между собой, образуя трёхфазную систему. На щитке машины имеется шесть зажимов, к которым присоединяются начала и концы обмоток каждой фазы. Для подключения обмоток статора к трёхфазной сети они могут быть соединены звездой или треугольником, что даёт возможность включать двигатель в сеть с двумя различными линейными напряжениями. Например, двигатель может работать от сети с напряжением 220 и 127 в или 380 и 220 в. На щитке машины указаны оба напряжения сети, на которые рассчитан двигатель, т. е. 220/127 в или 380/220 в.
Для более низких напряжений, указанных на щитке, обмотки статора соединяются в треугольник, для более высоких – в звезду. Сердечник ротора также набирают из стальных пластин толщиной 0,5 мм, изолированных лаком или тонкой бумагой для уменьшения потерь на вихревые токи. Пластины штампуют с впадинами и собирают в пакеты, которые крепят на валу машины, образуя цилиндр с продольными пазами. В пазах укладывают проводники обмотки ротора. В зависимости от типа обмотки асинхронные машины могут быть с фазным и короткозамкнутым роторами. Фазная обмотка ротора выполнена подобно статорной, т. е. проводники соответствующим образом соединены между собой, образуя трёхфазную систему. Обмотки трёх фаз соединены звездой. Начала этих обмоток подключены к трём контактным медным кольцам, укреплённым на валу ротора. Кольца изолированы друг от друга и от вала и вращаются вместе с ротором. При вращении колец поверхности их скользят по угольным или медным щёткам, неподвижно укреплённым над кольцами. Обмотка ротора может быть замкнута на какое-либо сопротивление или накоротко при помощи указанных выше щёток. Короткозамкнутая обмотка ротора выполняется по типу беличьего колеса.
Короткозамкнутая обмотка ротора асинхронного двигателя
В пазах ротора укладывают массивные стержни, соединённые на торцовых сторонах медными кольцами. Часто короткозамкнутую обмотку ротора изготовляют из алюминия. Алюминий в горячем состоянии заливают в пазы ротора под давлением . Такая обмотка всегда замкнута накоротко и включение сопротивлений в неё невозможно.
Двигатели с короткозамкнутым ротором проще и надёжнее в эксплуатации, значительно дешевле, чем двигатели с фазным ротором. Однако двигатели с фазным ротором, как мы увидим ниже, обладают лучшими пусковыми и регулировочными свойствами. В настоящее время асинхронные двигатели выполняют преимущественно с короткозамкнутым ротором и лишь при больших мощностях и в специальных случаях используют фазную обмотку ротора.
В нашей стране производят асинхронные двигатели мощностью до десятков тысяч киловатт. Между статором и ротором имеется воздушный зазор, величина которого оказывает существенное влияние на рабочие свойства двигателя. Наряду с важными положительными качествами – простотой конструкции и обслуживания, малой стоимостью – асинхронный двигатель имеет и некоторые недостатки, из которых наиболее существенным является относительно низкий коэффициент мощности . У асинхронного двигателя этот коэффициент при полной нагрузке может достигать значений 0,85 – 0,9; при недогрузках двигателя его коэффициент резко уменьшается и при холостом ходе составляет 0,2 – 0,3.
Низкий коэффициент мощности асинхронного двигателя объясняется большим потреблением реактивной мощности, которая необходима для возбуждения магнитного поля. Магнитный поток в асинхронном двигателе встречает на своём пути воздушный зазор между статором и ротором, который в большой степени увеличивает магнитное сопротивление, а следовательно, и потребляемую двигателем реактивную мощность. В целях повышения коэффициента мощности асинхронных двигателей воздушный зазор стремятся делать возможно меньшим, доводя его у малых двигателей (порядка 2 – 5 квт) до 0,3 мм. В двигателях большой мощности воздушный зазор приходится увеличивать по конструктивным соображениям, но всё же он не превышает 2 – 2,5 мм.