Вопросы для самопроверки
Тема 8. Контроллеры отечественных и зарубежных изготовителей
Литература: [11, 12] Программируемый логический контроллер (ПЛК) — законченное изделие, имеющее физические входы, выходы, интерфейсы и человеко-машинный интерфейс предназначенное для управления технологическими процессами. Различают контроллеры (адаптеры) для управления электронными узлами информационных сетей, различных вычислителей, радио- и теле аппаратуры, мультимедийных средств и т.д. Здесь речь идет лишь о ПЛК для создания систем автоматического управления технологическими процессами. Классификация современных контроллеров. Развитие электронной элементной базы, разработка новых средств информационного обмена, развитие алгоритмов управления способствует тому, что линейка ПЛК непрерывно расширяется. Многообразие ПЛК с различными функциональными и техническими, конструктивными характеристиками настолько велико, что разработчики систем автоматизации зачастую оказываются перед нелегким выбором: какой контроллер наилучшим образом подойдет для решения той или иной задачи. ПЛК классифицируются по ряду признаков, которые наиболее важны для потребителя. Определение для каждого контроллера его классификационных особенностей, его места среди прочих контроллеров позволит с большей точностью выбрать ПЛК для решения конкретной задачи. Классификация по стране-производителю. Ранее считалось, что контроллеры, произведённые в Европе, Америке и Японии, гораздо надежнее и функциональнее, чем их аналоги из Юго-Восточной Азии и России. В настоящее время этот классификационный признак, скорее всего, потерял актуальность. Российские предприятия набрались опыта и схемотехнические решения у нас подчас даже лучше, чем у западных аналогов. По характеристикам контроллеры-аналоги различных стран-производителей почти не отличаются. Системное и прикладное программное обеспечение либо очень похоже, либо вообще используются стандартизированные продукты (к примеру OS Linux широко используется как на отечественных контроллерах, так и на импортных). Элементная база и в импортных, и в российских контроллерах применяется одна и та же. Границы между производителями электроники постепенно исчезают вообще. Мощность. Под обобщённым термином «мощность» понимается разрядность и быстродействие центрального процессора, объём разных видов памяти, число портов и сетевых интерфейсов. Очень часто основным показателем, косвенно характеризующим мощность контроллера и, одновременно, являющимся важнейшей его характеристикой, является число входов и выходов (как аналоговых, так и дискретных), которые могут быть подсоединены к контроллеру. По этому показателю контроллеры подразделяются на следующие классы:
- наноконтроллеры (часто с встроенными функциями), имеющие до 15 входов/выходов;
- малые контроллеры, рассчитанные на 15-100 входов/выходов;
- средние контроллеры, рассчитанные примерно на 100-300 входов/выходов;
- большие контроллеры, рассчитанные примерно на 300-2000 входов/выходов;
- сверхбольшие контроллеры, имеющие примерно от 2000 и более входов/выходов.
Область применения. Область применения – один из наиболее важных признаков классификации. Область применения контроллера накладывает целый ряд требований к контроллерам и очень сильно сужает круг поиска при разработке систем управления. Специализированный контроллер со встроенными функциями. Обычно им является минимальный по мощности контроллер, программа действия которого заранее прошита в его памяти, а изменению при эксплуатации подлежат только параметры программы. Число и набор модулей ввода/вывода определяется реализуемыми в нем функциями. Часто такие контроллеры реализуют различные варианты функций регулирования. Основные области применения: локальное управление какой-либо малой технологической установкой или механизмом. Так, например, управление нагревом муфельной печи имеет смысл осуществить при помощи отдельного температурного контроллера. Во-первых, контроллер можно будет расположить возле самой печи, что избавит от необходимости далеко вести провода от датчиков, а во-вторых, температурные контроллеры, как правило, имеют органы индикации, которые позволят видеть текущее значение температуры. Контроллер для реализации логических зависимостей (коммандоаппарат). Главные сферы применения такого контроллера: станкостроение, машиностроение, замена релейно-контактных шкафов во всех отраслях промышленности. Он характеризуется прошитой в его памяти развитой библиотекой логических функций и функций блокировки типовых исполнительных механизмов. Для его программирования используются специализированные языки типа релейно-контактных схем. Набор модулей ввода/вывода у такого контроллера рассчитан, в основном, на разнообразные дискретные каналы. Наиболее простыми представителями данного класса контроллеров являются интеллектуальные реле. Контроллер, реализующий любые вычислительные и логические функции. Наиболее распространённый универсальный контроллер, не имеющий ограничений по области применения. Центральный процессор контроллера имеет достаточную мощность, разрядность, память, чтобы выполнять как логические, так и математические функции. Иногда, для усиления его вычислительной мощности, он снабжается ещё и математическим сопроцессором (во многих современных процессорах математический сопроцессор интегрирован в сам кристалл). Инструментальные средства для программирования таких контроллеров, как правило, поддерживают несколько языков программирования, таких как язык релейно-контактных схем, функционально-блоковых диаграмм, язык С, Basic, Pascal и тому подобные. Как правило, также предоставляется большая библиотека уже реализованных логических, математических и коммуникационных функций. В состав модулей ввода/вывода входят модули на всевозможные виды и характеристики каналов (аналоговых, дискретных, импульсных и т.д.). Контроллер противоаварийной защиты. Он должен отличаться от контроллеров других классов:
- особенно высокой надежностью, достигаемой различными вариантами диагностики и резервирования (например, диагностикой работы отдельных компонентов контроллера в режиме реального времени, наличием основного и резервного контроллеров с одинаковым аппаратным и программным обеспечениями и с модулем синхронизации работы контроллеров, резервированием блоков питания и коммуникационных шин);
- высокой готовностью, т. е. высокой вероятностью того, что объект находится в рабочем режиме (например, не только идентификацией, но и компенсацией неисправных элементов; не просто резервированием, но и восстановлением ошибок программы без прерывания работы контроллеров);
- отказоустойчивостью, когда при любом отказе автоматизируемый процесс переводится в безопасный режим функционирования.
- Контроллер цепи противоаварийной защиты должен иметь сертификат, подтверждающий безопасность его работы в цепях противоаварийной защиты.
Контроллер телемеханических систем автоматизации. Данный класс универсальных контроллеров удобен для создания систем диспетчерского контроля и управления распределёнными на местности объектами. В контроллерах данного класса повышенное внимание уделяется программным и техническим компонентам передачи информации на большие расстояния беспроводными линиями связи. В качестве таких линий часто используются УКВ-радиоканалы с обычными или транковыми радиостанциями. При этом возможна передача информации от каждого контроллера в диспетчерский центр, а также эстафетная передача информации по цепи от одного контроллера к другому до достижения диспетчерского центра. В настоящее время, в связи с большим скачком в развитии сотовой связи, всё большее распространение получает передача информации через сети GSM. По сравнению с транковыми сетями сети GSM имеют ряд достоинств и недостатков, обсуждение которых выходит за рамки данной статьи. Тем не менее отметим, что всё большее количество производителей контроллеров для телемеханических систем автоматизации предлагают коммуникационные модули со встроенными GSM-модемами. Открытость архитектуры. По структуре контроллеры подразделяются на два класса: контроллеры, имеющие фирменную закрытую структуру, и контроллеры открытой структуры, основанной на одном из магистрально-модульных стандартов. При закрытой фирменной структуре изменения (модификации) контроллера возможны, обычно, только компонентами производителя. Сами изменения достаточно ограничены и заранее оговорены производителем. При открытой магистрально-модульной структуре, имеющей стандартный интерфейс для связи центрального процессора с другими модулями контроллера, ситуация кардинально меняется:
- открытость и широкая доступность стандарта на шину, соединяющую модули разного назначения, даёт возможность выпускать в данном стандарте любые модули разным производителям, а разработчикам контроллеров даёт возможность компоновать свои средства из модулей разных фирм;
- возможность любой модификации и перекомпоновки средств путем замены в них отдельных модулей, а не замены самих средств, удешевляет эксплуатацию средств;
- сборка контроллеров из готовых модулей позволяет точнее учитывать конкретные технические требования и не иметь в них лишних блоков и элементов, не нужных для данного конкретного применения;
- широкая кооперация разных фирм, поддерживающих данный стандарт на шину и работающих в этом стандарте, позволяет пользователям модулей не быть привязанными к конкретному поставщику и иметь широкий выбор необходимой ему продукции.
В качестве примера распространённого стандартного интерфейса для обмена информацией внутри контроллера можно привести интерфейс VME. Эта шина была разработана фирмой Motorola и впоследствии была стандартизирована IEC как ANSI/IEEE 1014-1987 (отечественный аналог – ГОСТ Р МЭК 821-2000). PC-совместимость. По этому признаку все контроллеры можно разделить на два класса: PC-совместимые и PC-несовместимые. Каждый из этих классов имеет свои достоинства и недостатки. РС-совместимые контроллеры по сравнению с РС— несовместимыми контроллерами в целом обладают большей мощностью, легче стыкуются с различными SCADA, MES, ERP системами, системами управления базами данных, открыты для большинства стандартов в областях коммуникаций и программирования, они в среднем дешевле, проще обслуживаются и ремонтируются. В то же время РС-несовместимые контроллеры лучше учитывают требования промышленной автоматики; их операционные системы гарантируют отклик контроллера на внешнее событие через заданное время (операционные системы реального времени). Они в целом более надежны, так как больше используют наработанные в промышленности способы диагностики и горячего резервирования, обеспечивающие отказоустойчивость системы в целом. В них шире используются возможности связи с различными полевыми шинами. Конструктивное исполнение. По конструктивному исполнению контроллеры можно разделить на несколько групп, мы их условно назовем так:
- встраиваемые;
- размещаемые в общий конструктив;
- модульного типа;
Встраиваемые контроллеры. Как правило, не имеют корпуса, часто конструкция просто крепится на раме. Требований к защитным оболочкам таких контроллеров не предъявляются, поскольку контроллеры встраиваются в общий корпус оборудования и являются неотъемлемой частью этого оборудования. Контроллеры, размещаемые в общий конструктив. Такие контроллеры характеризуются тем, что все модули – процессорный, коммуникационные, модули ввода-вывода – размещаются в одном конструктиве. В таких контроллерах, как правило, предусматривается некая «материнская» плата с разъёмами, в которые вставляются все модули контроллера. Конструктивы таких контроллеров бывают как оригинальными, разрабатываемыми производителями, так и стандартизированными. Одним из примеров стандартизированных конструктивов является конструктив Евромеханика (DIN 41494/IEC 297-1). Стандарт Евромеханика регламентирует ширину, высоту и глубину рамы контроллера. Контроллеры модульного типа. Контроллеры модульного типа не используют общего конструктива. Каждый модуль таких контроллеров, будь то процессорный модуль или модуль ввода-вывода, имеет собственный корпус. Так как защитную оболочку для каждого модуля сделать проще, чем для всего контроллера, то именно этот тип контроллеров чаще всего выпускают для жёстких условий эксплуатации в исполнениях IP 67 и выше. Контроллеры модульного типа очень часто выпускают в корпусе для монтажа на рейку DIN NS 35/7,5. Можно выделить две разновидности контроллеров: с внутренней межмодульной шиной и с внешней шиной. Модули контроллеров с внутренней межмодульной шиной на боковых поверхностях имеют контакты для подключения соседних модулей. А модули контроллеров с внешней шиной, как правило, используют для связи между модулями какую-нибудь скоростную полевую шину, например CAN. Для правильного выбора контроллера применительно к той или иной задаче, конечно, не будет достаточно классифицировать его по тем или иным признакам. Разработчикам АСУ приходится изучать много литературы и технической документации. Но, тем не менее, классификация контроллеров позволяет лучше понять их рынок в целом и сократить время на поиск и выбор наиболее подходящей модели. Программируемые логические контроллеры (ПЛК) и среды их программирования. Программируемый логический контроллер (ПЛК) — законченное изделие, имеющее физические входы, выходы, интерфейсы и человеко-машинный интерфейс. Отличие ПЛК от контрольно-измерительных приборов заключается в отсутствии жестко прописанного алгоритма работы. За счет этого на ПЛК можно реализовывать практически любые алгоритмы управления, но сам алгоритм управления должен создать непосредственно пользователь контроллера. Для создания алгоритма, его тестирования и записи в контроллер используется среда программирования. Разработано большое количество сред программирования для самых разнообразных контроллеров. Контроллеры малоканальные многофункциональные регулирующие микропроцессорные типа РЕМИКОНТ Р-130, Р-130ISa, КРОСС. Контроллер РЕМИКОНТ Р-130 предназначен для автоматического регулирования и логического управления технологическими процессами в электротехнической, энергетической, химической, металлургической, пищевой, цементной, стекольной и других отраслях промышленности. Эффективно решает как сравнительно простые, так и сложные задачи управления. Благодаря малоканальности контроллер позволяет, с одной стороны, экономично управлять небольшим агрегатом и, с другой, обеспечить высокую живучесть крупных систем управления. В контроллеры встроены развитые средства самодиагностики, сигнализации и идентификации неисправностей, в том числе при отказе комплектующих изделий, выходе сигналов за допустимые границы, сбое в ОЗУ, нарушении обмена по кольцевой сети и т.п. Для дистанционной сигнализации об отказе предусмотрены специальные дискретные выходы. Контроллеры Р-130 по интерфейсному входу-выходу могут объединяться в локальную управляющую сеть “Транзит” кольцевой конфигурации, которая с помощью блока “Шлюз БШ-1” может взаимодействовать с любым внешним абонентом (например, ЭВМ). Ремиконт Р-130ISa построен на базе одноплатного РС-совместимого компьютера промышленного исполнения, имеет открытую программно-аппаратную архитектуру. Контроллеры содержат средства оперативного управления, расположенные на лицевой панели контроллера. Эти средства позволяют вручную изменять режимы работы, устанавливать задание, управлять ходом выполнения программы, вручную управлять исполнительными устройствами, контролировать сигналы и индицировать ошибки. Состав Ремиконта-130 представлен на рис. 8.1. Блок контроллера БК-1 ведет обработку информации в цифровой форме, организует программу всех алгоритмов управления, обеспечивает программу обслуживания пульта настройки ПН-1 и лицевой панели ПЛ, извлекает нужные алгоритмы, «зашитые» в памяти контроллера, эти алгоритмы объединяются в систему заданной конфигурации, в них устанавливается требуемые параметры настройки. С помощью лицевой панели ПЛ и пульта настройки ПН-1 обеспечивается оперативное управление до 4 контуров автоматического регулирования или логико-программное и шаговое дискретное управление. Средства связи с объектом организуют предварительное усиление сигналов термопар и термометров сопротивления, формирование дискретных выходных сигналов и импульсных цепей для управления различного рода исполнительными устройствами.  Рис. 8.1. Состав Ремиконта-130 Ремиконт серии Р-130 — проектно-компонуемое изделие, содержащее базовый комплект аппаратуры, поставляемый всегда независимо от объема решаемой задачи, и проектно-компонуемого комплекта, состав которого в основном зависит от номенклатуры и числа каналов ввода-вывода информации. В блок контроллера БК-1 (рис. 8.1) входят: а) в основную часть:
Рис. 8.1. Состав Ремиконта-130 Ремиконт серии Р-130 — проектно-компонуемое изделие, содержащее базовый комплект аппаратуры, поставляемый всегда независимо от объема решаемой задачи, и проектно-компонуемого комплекта, состав которого в основном зависит от номенклатуры и числа каналов ввода-вывода информации. В блок контроллера БК-1 (рис. 8.1) входят: а) в основную часть:
- модуль процессора ПРЦ-10М1, имеющего энергонезависимую память для хранения введенной в контроллер программы управления;
- модуль стабилизированного напряжения МСН10, обеспечивающий питанием весь контроллер БК-1 вместе с пультом настройки ПН-1;
б) в переменную часть:
- два посадочных места для устройств связи с УСО-А и УСО-Б, куда могут быть установлены один или два из 3 модификаций модулей УСО:
- модуль аналоговых сигналов MAC;
- модуль аналоговых и дискретных сигналов МДА;
- модуль дискретных сигналов МСД.
Контроллеры P-130 и Р-130ISa представляют собой комплекс технических средств. В состав контроллеров входят следующие блоки:
- блок контроллера Р-130 — БК-1(модели: регулирующая 01, логическая 02);
- блок контроллера Р-130ISa — БК-1М/01 (модель — регулирующая 01);
- пульт настройки ПН-1 (для Р-130);
- резисторы нормирующие РН-1;
- блоки питания БП-1, БП-4;
- блок усилителей сигналов низкого уровня БУТ-10;
- блок усилителей сигналов резистивных датчиков БУС-10;
- блок усилителя мощности БУМ-10;
- блок переключения БПР-10;
- блок шлюза БШ-1(для Р-130);
- блок стирания БСТ-1(для Р-130);
- межблочный соединитель для приборных цепей МБС;
- клеммно-блочный соединитель КБС-0 (для размножения общих точек);
- клеммно-блочный соединитель КБС-1 (для БП-1, БУТ-10, БУС-10, БУМ-10);
- клеммно-блочный соединитель КБС-2;
- клеммно-блочный соединитель КБС-3 (для дискретных цепей ввода-вывода БК-1, БК-1М/01 и БПР-10).
Блоки контроллера БК-1 и БК-1М/01 являются центральными, а остальные дополнительными. Центральный блок преобразует аналоговую и дискретную информацию в цифровую форму, ведет обработку цифровой информации и вырабатывает управляющие воздействия. Дополнительные блоки используются для предварительного усиления сигналов термопар и термометров сопротивления, формирования дискретных выходных сигналов на напряжение 220 В, организации внешних переключений и блокировок и т.п. Контроллеры P-130 и Р-130ISa имеют проектную компоновку, которая позволяет пользователю выбрать нужный набор модулей и блоков согласно числу и виду входных-выходных сигналов. Количество контуров регулирования:
- до 4 для Р-130;
- до 8 для Р-130ISa. Функциональные параметры каждого контура:
- вид регулятора — аналоговый, импульсный;
- режим работы — локальный, каскадный, дистанционный, ручной;
- вид задания — ручной, программный, внешний (супервизорный);
- закон регулирования — ПИД, ПИ, ПД, П;
- контролируемые параметры — задание, вход, рассогласование, выход, значение произвольного параметра, параметров программы, ошибки контура.
Архитектура контроллеров обеспечивает возможность вручную или автоматически включать, отключать, переключать и реконфигурировать контуры регулирования. Все эти операции выполняются безударно независимо от сложности структуры управления. В сочетании с обработкой аналоговых сигналов контроллер позволяет выполнять также логические преобразования сигналов и вырабатывать не только аналоговые или импульсные, но и дискретные команды управления. В контроллеры устанавливаются 2 любых сменных модуля входа-выхода УСО (устройства связи с объектом), выбираемых заказчиком из 7 типов модулей УСО (таблица). Применение различных комбинаций из 7 типов модулей УСО создает 35 модификаций контроллеров. Программное обеспечение. Технологическое программирование контроллеров выполняется специалистами, знакомыми с традиционными средствами контроля и управления в АСУ ТП, без привлечения программистов. Запрограммированная информация сохраняется при отключении питания с помощью энергонезависимого источника питания. Встроенное программное обеспечение позволяет выполнить проверку работоспособности и настройку контроллеров. Контроллер Р-130. Процесс программирования заключается в извлечении из библиотеки контроллера необходимых алгоритмов. Имеет 76 зашитых в ПЗУ алгоритмов дискретной и непрерывной обработки информации, до 99 алгоритмических блоков (алгобоков) со свободным их заполнением любыми алгоритмами из библиотеки и свободным конфигурированием между собой и с входами – выходами контроллера. Каналы интерфейсной связи — ИРПС или RS-232C. Скорость обмена – 1,2 ; 2,4; 4,8;9,6 кбит/с. Контроллер Р-130ISa. Имеет встроенную исполнительную систему ISaGRAFtargetkernel, позволяющую исполнять программы, написанные на технологических языках программирования, поддерживаемых системой ISaGRAF (стандарт МЭК публикация 61131-3), в основном на языке FBD. Система программирования ISaGRAF – общедоступная система компании Altersys, не требующая профессиональных знаний по программированию. Имеет операционную систему реального времени. Осуществляется поддержка сетей — Modbus по RS—232/485 и TCP/IP(Ethernet). Скорость обмена — до 115,2 кбит/с (по RS—232C), до 10 Mбит/с (по Ethernet). Среда программированияCoDeSys. Для программирования контроллеров широко используется среда программирования CoDeSys vразличных версий. Среда CoDeSys разработана немецкой компанией 3S—Software для программирования контроллеров различных производителей. Так, с помощью этой же среды программируются контроллеры Wago, Beckhoff, ABB. CoDeSys включает в себя следующие основные компоненты:
- система исполнения;
- среда программирования.
Графическая оболочка, устанавливается на ПК. Служит для создания проекта, его отладки, и перевода в машинный язык (компилирование). Среда программирования включает:
- редактор, компилятор и отладчик МЭК-проектов;
- поддержку всех 5 языков программирования МЭК;
- средства построения и конфигурирования периферийных модулей ввода/вывода ПЛК (PLCConfiguration);
- средства создания визуализации;
- средства коммуникаций (сетевые переменные, ОРС-сервер, DDE-сервер).
Среда программирования CoDeSys поставляется в комплекте с контроллером на CD. Target-файлы (набор файлов целевой платформы) необходимы для того, чтобы указать среде программирования, для какого типа контроллера пишется проект. Target-файлы содержат в себе системную информацию о подключаемом ПЛК:
- наличие и тип физических входов и выходов контроллера;
- описание ресурсов контроллера;
- расположение данных в МЭК-памяти.
Данная информация используется средой программирования CoDeSys при создании проекта и загрузке его в ПЛК. Перед созданием проекта необходимо установить Target-файл, соответствующий типу контроллера и прошивке. Target-файлы поставляются на CD в комплекте с ПЛК. Системное программное обеспечение (СПО) ПЛК управляет работой контроллера на аппаратном уровне (уровень драйверов для аппаратных устройств внутри контроллера — описывает их взаимодействие). СПО «прошивается» в системной памяти каждого контроллера. Новые версии прошивки создаются для внесения исправлений в работу контроллера либо для добавления новых функций. Цикл ПЛК. Выполнение программ, написанные для исполнения на ПК и ПЛК, различаются. Исполнение программы управления в ПЛК происходит циклически. Это означает, что в течение заданного интервала времени (времени цикла ПЛК) система:
- считывает значения из области входов;
- вызывает и один раз выполняет необходимую программу (PLC_PRG по умолчанию);
- пройдя алгоритм от начала и до конца, записывает результаты его работы в память выходов.
Затем эти операции повторяются вновь. Время цикла ПЛК зависит от объема и сложности программы ПЛК. Например, для простой программы время цикла ПЛК компании ОВЕН составляет 1 мс, для более сложных программ оно может увеличиться. Время опроса датчиков или подключенных сетевых устройств, а также время изменения состояния выходов не связаны напрямую со временем цикла ПЛК. Работа с интерфейсами, входами и выходами и исполнение цикла ПЛК производятся параллельно. ПроектCoDeSys включает в себя:
- написанные пользователем программы (POU), описывающие алгоритм работы ПЛК;
- конфигурирование периферийного оборудования и драйверов ввода/вы вода (PLCConfigurations);
- визуализации процесса управления (Visualizations) и т.д.
Языки МЭК (языки программирования контроллеров). Стандартом МЭК предусмотрено 5 языков программирования ПЛК: IL, LD, FBD, ST, SFC. При разработке проекта пользователь может выбрать любой из языков для написания конкретного программного модуля (POU). В рамках одного проекта могут присутствовать программные модули, написанные на разных языках. В CoDeSys поддержаны все 5 языков, а также один дополнительный:
- II (InstructionList) — Список инструкций — язык программирования, напоминающий ассемблер SiemensSTEP7. Все операции производятся через ячейку памяти, «аккумулятор», в который программа записывает результаты произведенных действий. Пример:

- LD (LadderDiagram) — Релейные диаграммы -графический язык программирования, использующий принципы построения электрических схем. С помощью элементов «контакт» и «катушка» пользователь собирает схему прохождения сигнала. Язык удобен для реализации логических алгоритмов работы с дискретными сигналами. Пример:

- FBD (FunctionalBlockDiagram) — Диаграмма функциональных блоков -графический язык программирования. Все действия и операторы, используемые в данном языке, представляются в виде функциональных блоков (ФБ). ФБ имеют входы и выходы определенных типов, которые могут быть связаны между собой. Помимо стандартных ФБ пользователь может вставлять в алгоритм собственные POU, созданные в рамках данного проекта или реализованные в подключенных к проекту библиотеках. В CoDeSys реализован улучшенный язык программирования с помощью функциональных блоков, получивший обозначение CFC. Пример:

- ST (StructuredText) — Структурный текст — текстовый язык программирования, схожий с языком высокого уровня (С, Pascal). Язык ST удобен для реализации сложных вычислений, циклов и условий, для работы с аналоговыми сигналами. Пример:

- SFC (SequentionalFunctionalChart) — Последовательные функциональные схемы — графический язык, приспособленный для создания последовательности этапов алгоритма работы. Каждый этап реализуется на любом удобном для пользователя языке. Язык удобен для создания алгоритмов управления сложными процессами, имеющими несколько ступеней, написания моделей автоматов. Пример:

Работа по обновленной программе по технологии в 5 классе. Простейшие механические роботы исполнители

В 2022-2023 учебном году для работы по ФГОСам третьего поколения (обновленным) Министерством образования для составления рабочей программы для обучения в 5 классе был в помощь предложен коструктор. В программе по технологии для изучения появились модули, которые раньше не изучались. Один из них «Простейшие механические роботы-исполнители». Для обучения по новой программе по технологии в 5 классе учебников нет. Учитель вынужден подбирать материал для изучения сам. Данная разработка подготовлена для выступления на заседании ГМО учителей технологии г. Скопина Рязанской области учителем технологии МБОУ «СОШ №4» Тарасовой Татьяной Алексеевной
Просмотр содержимого документа
«Работа по обновленной программе по технологии в 5 классе. Простейшие механические роботы исполнители»
Муниципальное бюджетное общеобразовательное учреждение
«Средняя общеобразовательная школа №4» муниципального образования –
городской округ город Скопин Рязанской области
391803, Рязанская область, г. Скопин, Автозаводской микрорайон, д.6 тел./факс: (49156) 5-12-31
Работа по обновленной программе по технологии в 5 классе.
Простейшие механические роботы исполнители

Учитель технологии МБОУ «СОШ №4» г. Скопин
Тарасова Татьяна Алексеевна
Заседание ГМО учителей технологии
2022- 2023 учебный год
Работа по обновленной программе по технологии в 5 классе.
Простейшие механические роботы исполнители
По обновленной программе по технологии в 5 классе, составленной с помощью конструктора, изучению подлежит модуль «Простейшие механические роботы исполнители». На изучение темы отводится 2 часа. Так как учебника под данную программу нет, материал для проведения урока учитель вынужден искать в Интернете. Моим источником информации стали 1. Учебник по технологии 5 класс авторского коллектива: Е. С. Глозман, Е. Н. Кулакова, Ю. Л. Хотунцев, О. А. Кожина, И. В. Воронин, В. В. Воронина, А. Е. Глозман § 43. Роботы. Понятие о принципах работы роботов
2. План-конспект занятия по теме: «Роботы и робототехника»
Ширяевой Марины Анатольевны учителя технологии Буканской СОШ Алтайского края
Тема: Простейшие механические роботы исполнители
Пр. раб. Сообщения о роботах исполнителях
Цель: Формирование интереса к робототехнике
- образовательные:
- воспитательные:
- развивающие:
Робот в кратере вулкана,
Как в кастрюльке великана:
«Если не расплавлюсь,
То с работой справлюсь!»
Робот рыбок наблюдает,
Дно морское изучает.
«Выручай меня, матрос!
Я ракушками оброс!»
На другой планете робот
Пробы взял, поставил опыт:
«Воздух есть, и есть вода.
Человек, лети сюда!»
Это маленькая Таня,
А у Тани робот — няня.
«Слушайся, Танюша, маму,
Как я слушаюсь программу!»
- Ещё в далёкой древности люди мечтали создать существо, с огромным количеством рук, чтобы оно выполняло сразу много дел
- Первые попытки создать робота были у Архимеда. Это его катапульта и баллиста, которые помогали в боях с врагами.
- Первый человекоподобный механизм изготовил в 1495 г. Леонардо да Винчи. Это был механизм, одетый в рыцарские доспехи, приводился он в движение с помощью тросов и роликов. Этот рыцарь так ни разу и не побывал в бою.
- Центральный процессор — это «мозг» компьютера, устройство для обработки информации.
- Постоянная память, или постоянное запоминающее устройство (ПЗУ), используется для хранения неизменяемых данных в компьютере. Она способна хранить данные даже тогда, когда нет энергопитания компьютера.
- Оперативная память, или оперативное запоминающее устройство (ОЗУ), — это та часть компьютерной памяти, в которой во время работы компьютера хранится выполняемая программа и все данные, обрабатываемые процессором.
- Объясните, чем робот отличается от неробота.
- Верно ли, что радиоуправляемые игрушки — это настоящие роботы?
- Какое устройство управляет всеми действиями робота?
- Для чего нужно большое количество разнообразных контроллеров?
- Аптечный робот — мини-складское оборудование, которое устанавливается в аптеке, аптечных складах и медицинских учреждениях для оптимизации хранения, поиска и выдачи медикаментов к рабочему месту фармацевта (первому столу) или для продажи непосредственно
- Андроид (человекообразный робот) от греч. слова «человек»
и суффикса -oid («подобие») — человекоподобный
Могут выполнять функции как бытовых,так и военных и промышленных роботов. А также могут летать в космос - Биоробот — человек или животное, у которого вместо мозга вставлен имплантат (процессор), всё остальное тело — органическое.
- Промышленный робот — автоматическое устройство, состоящее из манипулятора и перепрограммируемого устройства управления, которое формирует управляющие воздействия, задающие требуемые движения исполнительных органов манипулятора. Применяется для перемещения предметов производства и выполнения различных технологических операций
- Транспортный робот — автоматическая машина, представляющая собой совокупность манипулятора, перепрограммируемого устройства управления и ходового устройства.
- Подводный робот — применения роботов в подводной среде.
- Бытовой робот — робот, предназначенный для помощи человеку в повседневной жизни.
- Боевой робот (военный робот) — устройства автоматики, заменяющие человека в боевых ситуациях для сохранения человеческой жизни или для работы в условиях, несовместимых с возможностями человека, в военных целях: разведка, боевые действия, разминирование и тому подобное.
- Зооробот — эторобот, внешне напоминающий какое-либо животное.
- Медицинский робот широко используются в медицине для диагностики и хирургических вмешательств.
- Микроробот, Наноробот-это управляемые устройства, способные не только двигаться, но и выполнять определенные виды задач. Например, связывать токсические вещества или контролируемо доставлять лекарства или гены в определенную область тела.
- Робот-игрушка
- Робот-официант
- Робот-экскурсовод
- Сегодня я узнала …
- Я поняла, что …
- Меня удивило …
- Особенно мне понравилось …
- Мне захотелось …
Для чего нужно большое количество разнообразных контроллеров
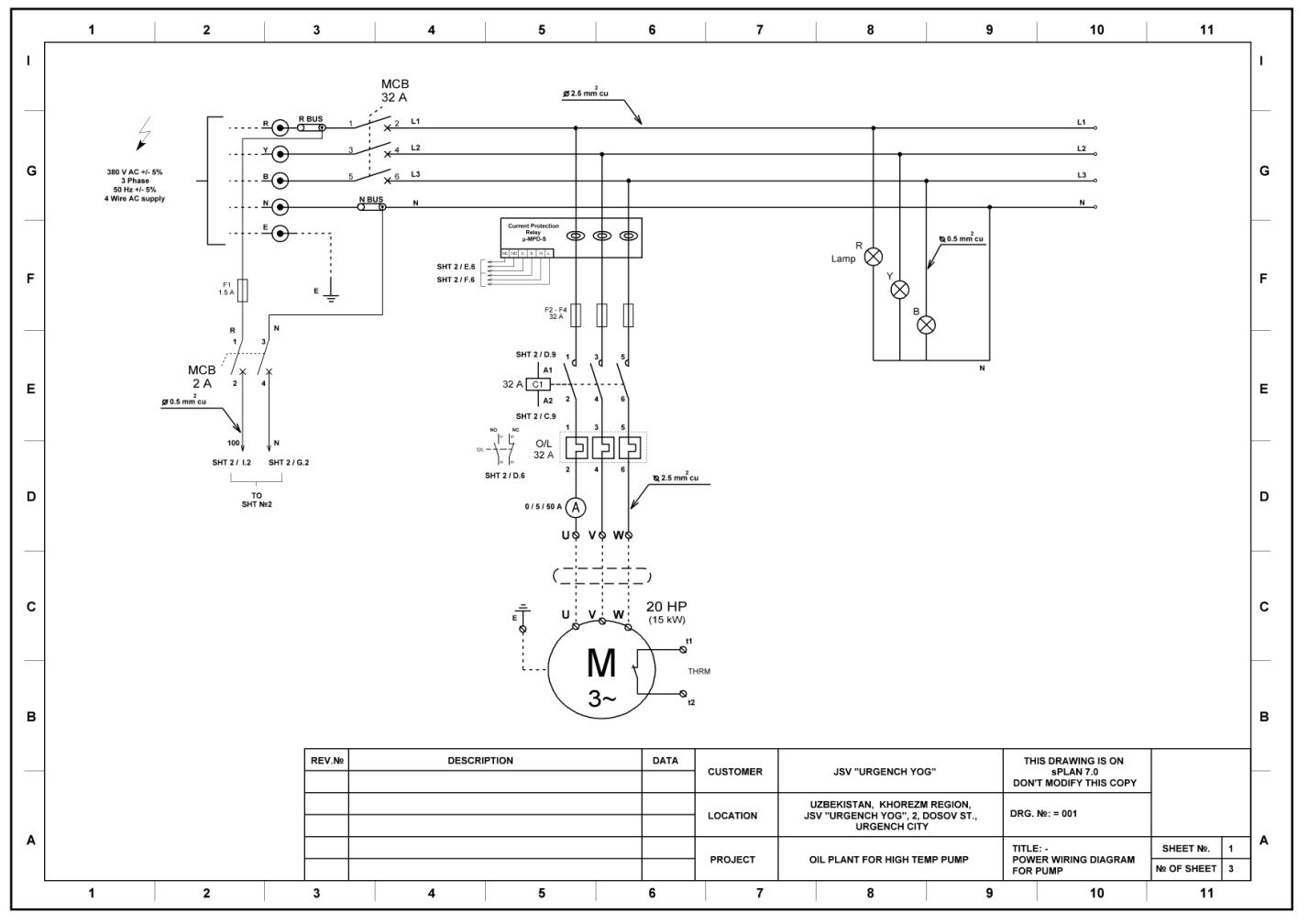
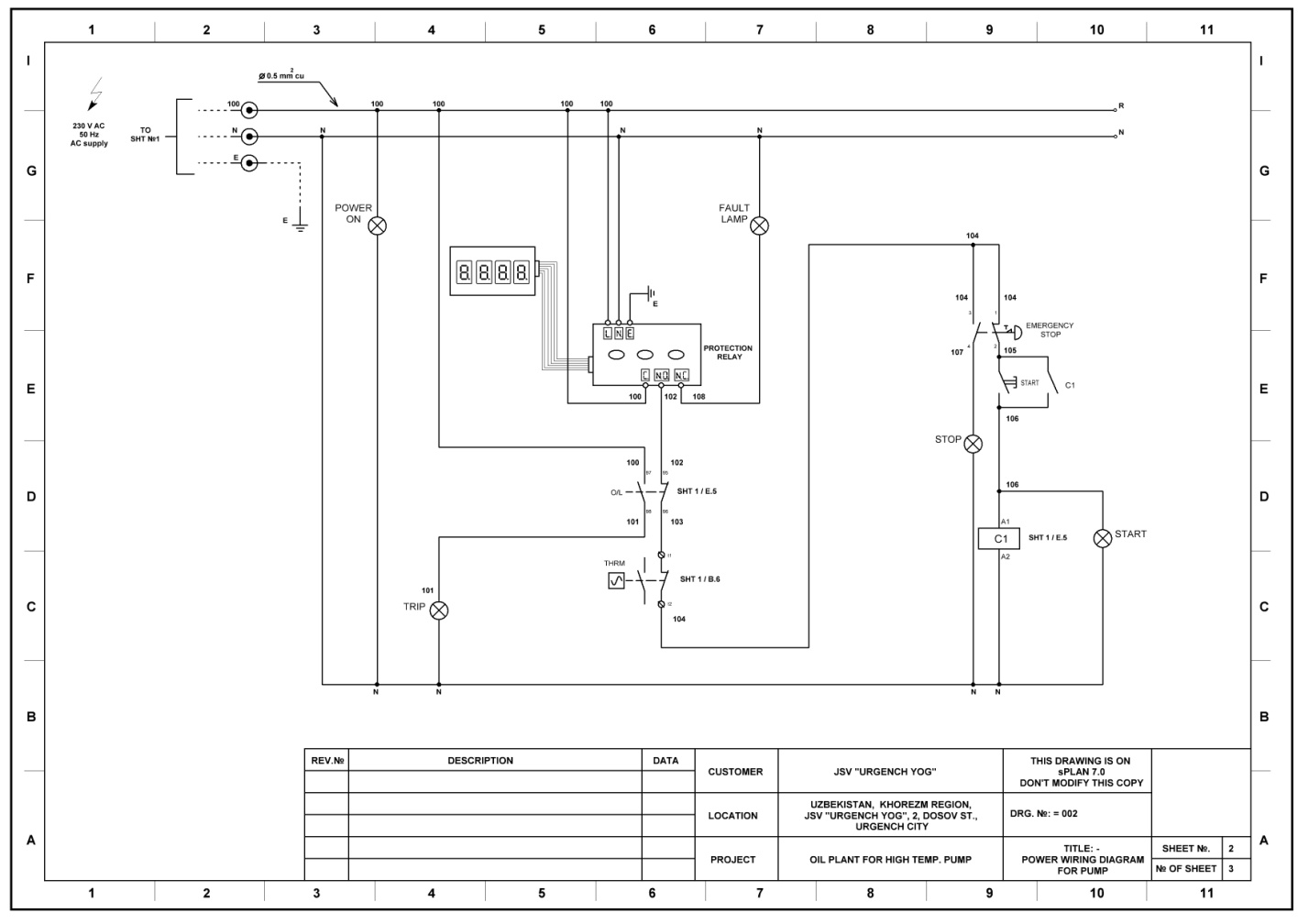
Данная схема разработана с применением защитного устройства называемым контроллер тока или напряжения с релейными выходами «С – NC – NO». Контроллер действительно необходимо устанавливать на каждый двигатель, но в силу ее дороговизны, на предприятиях обходятся примитивными защитными устройствами, таких как тепловое реле, контроллер напряжения и т.п. В качестве защитной блокировки от перегруза двигателя и его выхода из строя применяется контроллер тока от перегруза, причем на рынке, очень много разнообразных контроллеров тока, даже с применением систем подключения к ПЛК. Как говорится «Любой каприз за ваши деньги».
Почему необходимо устанавливать данный контроллер тока «Current controller»?
По статистике около 30 – 40% двигателей сгорают ежегодно. Причем сделать обмотку (восстановить) обходиться в пределах 30%, а то и больше от стоимости самого двигателя. Большинство людей предпочитают перематывать, а не заменять его новым, соответственно понятно почему. Что касается перемотанного двигателя, то процесс работы меняется кардинально, в силу его характеристик по качеству работы, режима экономии энергии, генерации тепла, что приводит к не лучшим показателям функциональности. К чему я это все пишу, конечно, вам покажется, что я рекламирую какую либо продукцию, но поверьте на слово, приобретя качественный контроллер тока, вы выиграете во многих показателях, прежде всего в качестве обслуживания оборудования, потому, что все в этом мире взаимосвязано. Многие люди, возможно квалифицированные электрики и даже энергетики считают, если находиться тепловое реле (также ее называют: реле перегрузки, теплушка и т.д.), то данное устройство защитит их оборудование. На моей практике, было много случаев, когда данное устройство не помогало, при этом за считанные секунды сгорали двигатели, не успев отключиться посредством теплового реле. Я также не отрицаю, что нужно их убирать, данное устройство хорошо использовать в последующем, а также при продолжительном режиме работы.
Положительные стороны данного контроллера:
— функция определение перефазирования;
— перегрузка, настраиваемая в зависимости от характеристик двигателя;
— определение сухого хода, настраиваемая на минимальные нагрузки;
— отключение при дисбалансе тока;
— определения потери одной и более фаз на линии;
Отрицательные стороны:
— дороговизна;
— в случае выхода из строя, приходиться менять контроллер;
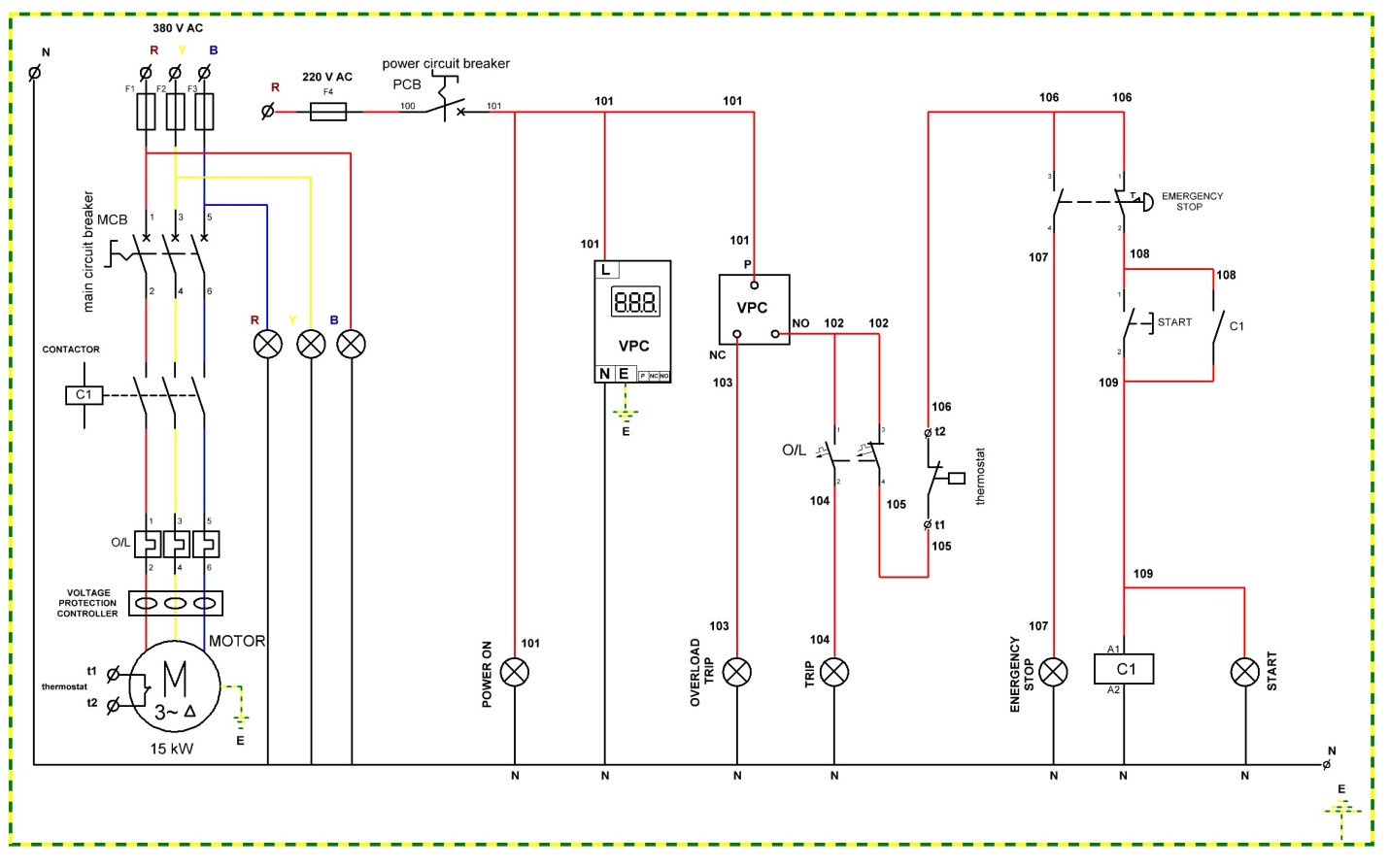
Далее представлена схема в развернутом виде, которую я составил для подробного изучения.

Если будут, какие-либо замечания по поводу представленной схемы, прошу писать мне на мейл или на форум. Я всегда рад ответить и поразмышлять над новыми идеями.
6. Контроллеры для систем автоматизации
Слово «контроллер» произошло от английского » control» (управление), а не от русского «контроль» (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще — с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины «контроллер» и «ПЛК» мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем — специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3 [Bertocco], который позже был переименован в МЭК 61131-3 [IEC]. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования (см. раздел «Программное обеспечение»), что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие «ПЛК» все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования.
С появлением мощных и дешевых микроконтроллеров в 1972 г. рынок ПЛК начал расти экспоненциально и за период с 1978 по 1990 год увеличился с 80 млн. долл. до 1 млрд. долл. и к 2002 г. составил 1,4 млрд. долл. [Webb]. В настоящее время мировой рынок ПЛК продолжает расти, хотя и гораздо меньшими темпами. Однако последнее замечание не относится к России, где события изменяются очень быстро в связи с возрождением экономики, появлением сильных отечественных производителей и системных интеграторов [Ицкович], а также огромными инвестициями международных корпораций в Российскую экономику.
ПЛК используются практически во всех сферах человеческой деятельности для автоматизации технологических процессов, в системах противоаварийной защиты и сигнализации, в станках с ЧПУ, для управления дорожным движением, в системах жизнеобеспечения зданий, для сбора и архивирования данных, в системах охраны, в медицинском оборудовании, для управления роботами, в системах связи, при постановке физического эксперимента, для управления космическими кораблями, для автоматизации испытаний продукции и т. д. Тем не менее, до сих пор остается много отраслей экономики, куда контроллерная автоматизация только начинает проникать.
Согласно последнему опросу по Интернет, проведенному журналом Control Engineering совместно с Reed Research, большая часть опрошенных использует ПЛК в задачах управления станками. На втором месте — задачи, связанные с управлением технологическими процессами, далее идет управление перемещениями и задачи диагностики. Чаще всего контроллеры используют для решения собственных задач (54%), реже для производства оборудования для продажи (25%), или для того и другого (17%).
Контроллеры используются не только как автономные средства локального управления технологическим установками, но и в составе широкомасштабных систем автоматизированного управления целыми предприятиями.
В настоящее время на Российском рынке преобладают контроллеры иностранных фирм: Siemens, Mitsubishi, ABB, Schneider Electric, GE Fanuc, однако с течением времени увеличивается доля рынка, занятая отечественной продукцией Российских фирм (НИЛ АП, Текон, Фаствел, ДЭП, Овен, Элемер, Эмикон и др.), что соответствует общемировой тенденции, когда в большинстве стран отечественные фирмы занимают большую долю рынка, чем иностранные. Это объясняется следующими факторами:
- благодаря использованию западных технологических линий и материалов качество изготовления Российских контроллеров часто превосходит зарубежное качество в связи с более высоким уровнем подготовки Российских специалистов;
- Российские фирмы обеспечивают более квалифицированную техническую поддержку и русскоязычную документацию;
- большую роль играет срок поставки и территориальная близость производителя к потребителю;
- соответствие отечественных разработок Российским стандартам, чего часто нельзя сказать об импортных контроллерах;
- лучшее знание Российского рынка отечественными производителями.
Широкому распространению ПЛК в большой степени способствует рост компьютерной грамотности населения, спецкурсы в ВУЗах, множество курсов повышения квалификации, проводимых ведущими системными интеграторами.