Как запустить бесколлекторный двигатель без контроллера
Имеется желание сконструировать самоделку аля судно на воздушной падушке.
У меня есть мотор
Модель BRUSHLESS MOTOR INNER ROTOR 5900
Бесколлекторный мотор для моделей самолётов и вертолётов.
Напряжение: 7,4-11,1В,
5900 оборотов на вольт,
Размеры двигателя: 28×39мм.
Диаметр вала: 2.3мм.
Я планирую его использовать как нагнетающий двигатель его не надо регулировать(выставил себе обороты и пусть крутится), а второй БК будет маршевым(толкающим) у него уже будет регулятор с этоим вопросов не возникает.
Питание будет осуществляться от липольки 11,1В примерно 2А может 2,6А как известно их (липольки) нельзя разряжать ниже 3В на банку отсюда следует что питание должно прекратить подаваться при достижении парога в 9В.
Вопрос номер раз. Как заставить работать нагнетающий БК двигатель на приемлемых оборотах чтобы он приподнял примерно 700г. без использования дистанционного регулятора хода.
Вопрос номер два. Как обеспечить автоматическое отключение нагнетающего БК двигателя при пароге в 9В.
Без регулятора двигатель не запустить. Стоимость готового регулятора — около 10 долларов.
Отсечка встроенная,внешних пищалок тоже вагон и маленькая тележка.
Также, рекомендую все же воспользоваться поиском. В частности, по ключевому слову “сервотестер”.
[QUOTE=leprud;2220294]Без регулятора двигатель не запустить. Стоимость готового регулятора — около 10 долларов.
Спасибо за ответ, а не подскажите где именно можноприобрести по указанной цене регулятор хода для БК? Название магазина или ссылку
Управление бесколлекторным двигателем по сигналам обратной ЭДС – понимание процесса
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями.
Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления.
Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина
Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1). Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.

Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.

Рисунок 2. Один электрический период трехфазного двигателя.
На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).

Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Чтобы получить результирующий вектор магнитного поля необходимо сложить данные вектора по закону сложения векторов.
Аналогично построение для второго и третьего моментов времени.

Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.

Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).

Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.
Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение
Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток.
Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.
Электрический период будем отсчитывать от первого вектора.

Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов.
Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
| Плюс питания | Минус питания | Обмотка не подключена |
| W | U | V |
| W | V | U |
| U | V | W |
| U | W | V |
| V | W | U |
| V | U | W |
Вид получившегося управляющего сигнала в соответствии с таблицей 1 изображен на рисунке 8. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.

Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).

Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
На осциллографе это выглядит так:

Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Конструктивные особенности
Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов.
Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.

а. б.
Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов. На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
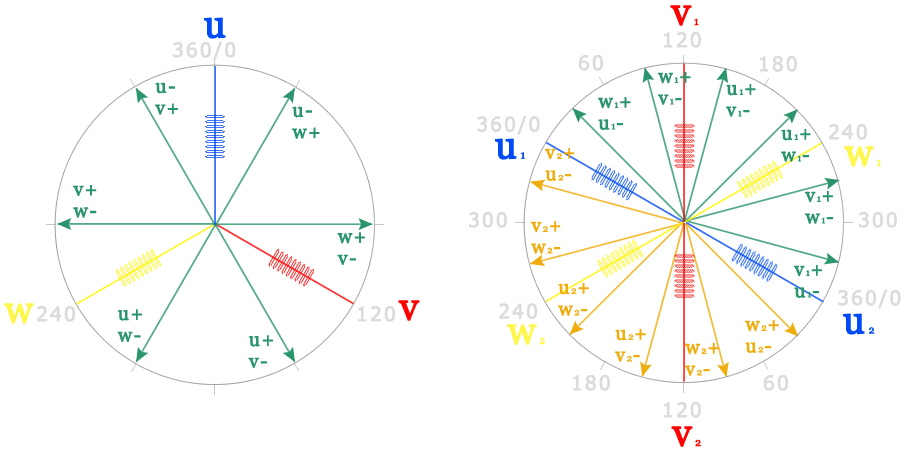
а. б.
Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов.
На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.

Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.
В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота.
Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
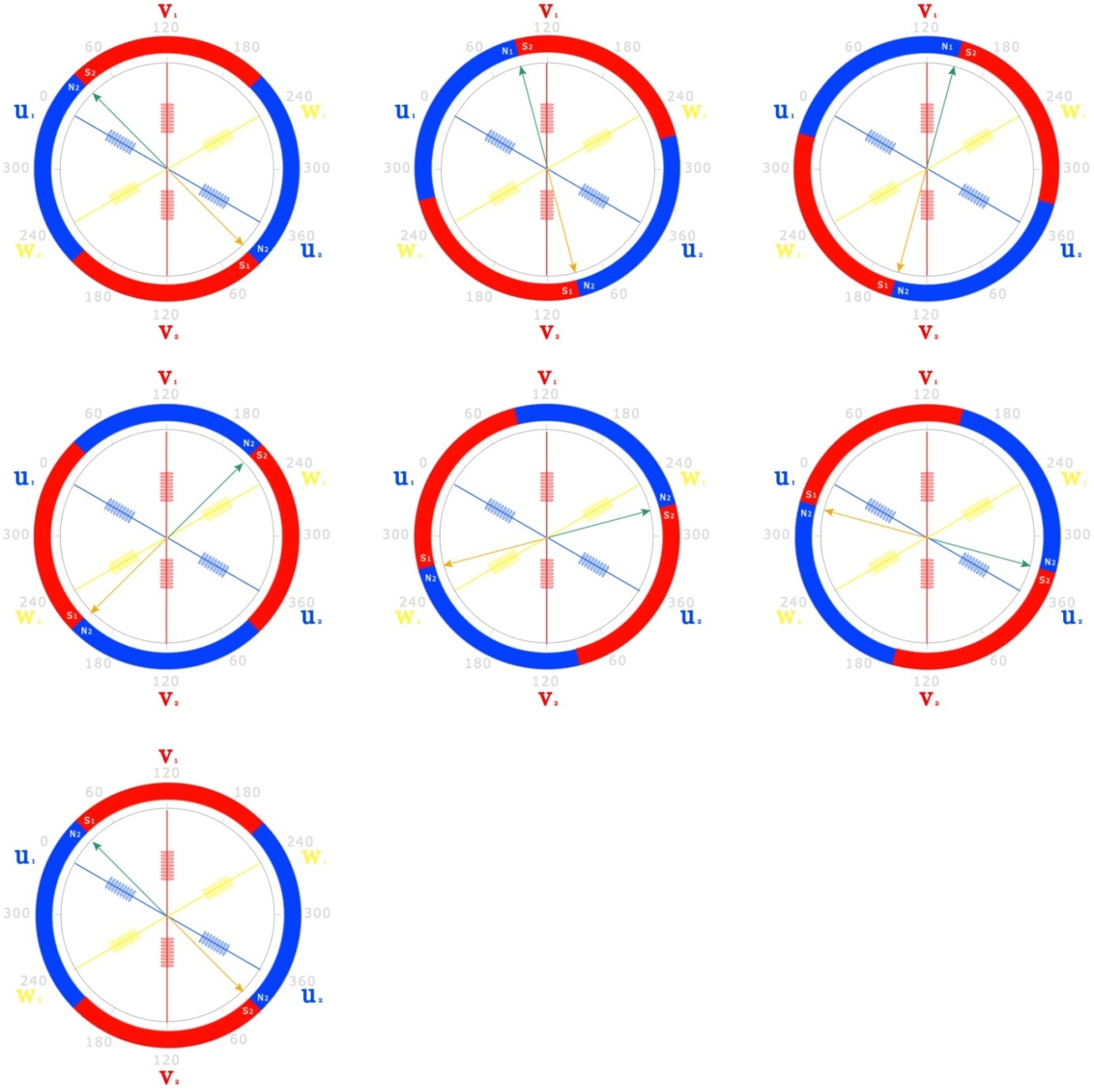
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Определение положения ротора бесколлекторного двигателя
Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Отслеживание положения ротора возможно несколькими способами:
1. По датчикам Холла
2. По обратной ЭДС
Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления.
Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла
Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла.
Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом. Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.

Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении.
Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | — | + |
| 1 | 0 | 1 | + | — | 0 | |
| 1 | 0 | 0 | + | 0 | — | |
| 1 | 1 | 0 | 0 | + | — | |
| 0 | 1 | 0 | — | + | 0 | |
| 360/N | 0 | 1 | 1 | — | 0 | + |
При равномерном вращении двигателя с датчиков поступает сигнал смещенный на 1/6 периода, 60 электрических градусов (рисунок 16).

Рисунок 16. Вид сигнала с датчиков Холла.
Управление с помощью сигнала обратной ЭДС
Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).

Рисунок 17. Изменение напряжения на фазе двигателя.
Сигнал с обмотки двигателя разбит на 4 момента:
1. Обмотка подключена к 0
2. Обмотка не подключена (свободная фаза)
3. Обмотка подключена к питающему напряжению
4. Обмотка не подключена (свободная фаза)
Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).

Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | — | Ожидание пересечения средней точки из + в — | + | 2 |
| 2 | Ожидание пересечения средней точки из — в + | — | + | 3 |
| 3 | + | — | Ожидание пересечения средней точки из + в — | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | — | 5 |
| 5 | Ожидание пересечения средней точки из + в — | + | — | 6 |
| 6 | — | + | Ожидание пересечения средней точки из — в + | 1 |
Пересечение средней точки проще всего детектировать компаратором, на один вход компаратора подается напряжение средней точки, а на второй текущее напряжение фазы.

Рисунок 19. Детектирование средней точки компаратором.
Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя
Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.

Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).

Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.

Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.
Схема со средней точкой

Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:

Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.

После прохождения сигнала через фильтр колебания сглаживается и получается ровное напряжение относительно которого можно детектировать пересечение обратной ЭДС.

Рисунок 26. Напряжение после делителя и фильтра низких частот.
Средняя точка будет менять свое значение в зависимости от напряжения (скважности ШИМ), так же как и огибающая сигнала.

Полученные сигналы с компараторов заводятся на микроконтроллер, который их обрабатывает по алгоритму выше.
Пока на этом все.
Подключение бесколлекторных двигателей. Проверка направления вращения.

Бесколлекторные двигатели постоянного тока называют так же вентильными, в зарубежной литературе BLDCM (BrushLes Direct Current Motor) или PMSM (Permanent Magnet Synchronous Motor). Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками, в отличие от коллекторного двигателя, где обмотки находятся на роторе. Из конструкции двигателя удаляется довольно сложный, требующий обслуживания тяжелый и искрящий узел – коллектор. Конструкция двигателя существенно упрощается. Двигатель получается легче и компактнее. Значительно уменьшаются потери на коммутацию, поскольку контакты коллектора и щетки заменяются электронными ключами. В итоге получаем электродвигатель с наилучшими показателями КПД и показателем мощности на килограмм собственного веса, с наиболее широким диапазоном изменения скорости вращения. На практике бесколлекторные двигатели греются меньше, чем их коллекторные братья. Переносят большую нагрузку по моменту. Применение мощных неодимовых магнитов сделали бесколлекторные двигатели еще более компактными. Конструкция бесколекторного двигателя позволяет эксплуатировать его в воде и агрессивных средах (разумеется, только двигатель, регулятор мочить будет очень дорого). Бесколлекторные двигатели практически не создают радиопомех. Единственным недостатком считают сложный дорогостоящий электронный блок управления (регулятор или ESC). Однако, если вы хотите управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники – просто железка. Нет возможности подать на него напряжение и добиться нормального вращения как у других двигателей.
Применение датчиков
Двигатели с датчиками положения более предпочтительны с технической точки зрения. Алгоритм управления такими двигателями значительно проще. Однако есть и свои минусы: требуется обеспечить питание датчиков и прокладку проводов от датчиков в двигателе к управляющей электронике; в случае выхода со строя одного из датчиков, двигатель прекращает работу, а замена датчиков, как правило, требует разборки двигателя. В тех случаях, когда конструктивно невозможно разместить датчики в корпусе двигателя, используют двигатели без датчиков. Конструктивно такие двигатели практически не отличаются от двигателей с датчиками. А вот электронный блок должен уметь управлять двигателем без датчиков. При этом блок управления должен соответствовать характеристикам конкретной модели двигателя. Если двигатель должен стартовать с существенной нагрузкой на валу двигателя (электротранспорт, подъёмные механизмы и т.п.) – применяют двигатели с датчиками. Если двигатель стартует без нагрузки на валу (вентиляция, воздушный винт, применяется центробежная муфта сцепления и т.п.), можно применять двигатели без датчиков. Запомните: двигатель без датчиков положения должен стартовать без нагрузки на валу. Если это условие не соблюдается, следует использовать двигатель с датчиками. Кроме того, в момент старта двигателя без датчиков возможны вращательные колебания оси двигателя в разные стороны. Если это критично для Вашей системы, применяйте двигатель с датчиками.
Три фазы
Трехфазные бесколлекторные двигатели приобрели наибольшее распространение. Но они могут быть и одно, двух, трех и более фазными. Чем больше фаз, тем более плавное вращение магнитного поля, но и сложнее система управления двигателем. 3-х фазная система наиболее оптимальна по соотношению эффективность/сложность, поэтому и получила столь широкое распространение. Далее будет рассматриваться только трехфазная схема, как наиболее распространенная. Фактически фазы – это обмотки двигателя. Поэтому если сказать “трехобмоточный”, думаю, это тоже будет правильно. Три обмотки соединяются по схеме “звезда” или “треугольник”. Трехфазный бесколлекторный двигатель имеет три провода – выводы обмоток. Двигатели с датчиками имеют дополнительных 5 проводов (2-питание датчиков положения, и 3 сигналы от датчиков). В трехфазной системе в каждый момент времени напряжение подается на две из трех обмоток. Таким образом, есть 6 вариантов подачи постоянного напряжения на обмотки двигателя, как показано на рисунке ниже. Это позволяет создать вращающееся магнитное поле, которое будет проворачиваться “шагами” на 60 градусов при каждом переключении.
Основные характеристики контроллеров
Для управления двигателем применяется электронный регулятор. В зарубежной литературе Speed Controller или ESC (Electronic speed control). Максимальный постоянный (сontinius) ток – указывает, какой ток контроллер способен держать продолжительное время. Как правило, этот параметр входит в обозначение контроллера (например Jes -18, Phoenix -10). Иногда указывают величину «кратковременного» тока, допустимого в течении нескольких секунд. «Кратковременный» ток способны держать выходные транзисторы контроллера, но рассеивать выделяемое при этом токе количество тепла контроллер не в состоянии. Максимальное рабочее напряжение — указывается, с каким количеством NiCd или литий-полимерных банок можно использовать контроллер. Для контроллеров с ВЕС-ом, эта величина может быть разная, в зависимости от количества сервомашинок. Это связано с рассеиванием тепла стабилизатором схемы ВЕС — при большем числе банок максимальный ток нагрузки BEC и, следовательно, количество сервомашинок меньше. Как правило, если используется ВЕС, количество банок не превышает 12. Если вы хотите работать с большим количеством банок, то придется ставить или отдельную батарею питания приемника, или использовать внешний ВЕС. Но в любом случае нельзя превышать максимальное напряжение, допустимое для контроллера. Максимальные обороты (maximum rpm) — программное ограничение максимальных оборотов. Всегда указывается для двухполюсного двигателя. Для многополюсных моторов это число надо разделить на количество пар полюсов. Например, если указано 63000 rpm, то для мотора с 12-ю магнитами максимальные обороты будут 63000/6=10500 rpm, а это уже не так много. Данная функция не дает мотору набрать большее, чем указано количество оборотов, некоторые контроллеры при превышении этого значения на холостом ходу начинают сбоить, вызывая значительные броски тока — мотор начинает резко дергаться. Этот эффект не является признаком неисправности мотора ли контроллера. Внутреннее сопротивление – полное сопротивление силовых ключей контроллера, без учета проводов. Чем мощнее контроллер, тем меньше его внутреннее сопротивление. Как правило, сопротивление проводов сравнимо с внутренним сопротивлением контроллера и вносит до 30% потерь. Для примера, внутреннее сопротивление контроллера Castle Creations Phoenix-25 13 mOhm, а сопротивление 30 см провода сечением 1кв.мм – 6 mOhm, то есть почти треть потерь приходится на провода. Частота импульсов контроллера (PWM Frequency) — как правило, составляет 7-8 Кгц. У «продвинутых» контроллеров частоту регулирования можно программировать на другие значения- 16 и 32 Кгц. Эти значения применяется в основном для высокооборотных 3-4-х витковых моторов с малой индуктивностью, при этом улучшается линейность регулирования частоты вращения.
Особенности подключения
Провода — не такое простое дело, как может показаться на первый взгляд. Есть несколько важных аспектов. Самое главное — нельзя делать провода от контроллера до аккумулятора большой длины! Дело в том, что стартовые токи беколлекторных моторов намного больше, чем аналогичных коллекторных, и при работе моторов возникают большие броски тока. Конденсаторы, всегда стоящие на входе контроллера, должны быть специального типа, но многие производители ставят обычные. При удлинении проводов от контроллера до батареи начинает сказываться их индуктивность, и может возникнуть ситуация, когда уровень помех по напряжению питания на входе контроллера станет настолько высок, что контроллер не сможет правильно определить положение ротора мотора (иногда при этом еще и «повисает» процессор контроллера). Известно несколько случаев полного «выгорания в дым» контроллеров, при удлинении проводов со стороны аккумулятора до 30см. Если необходимо увеличить длину проводов (например, двигатель стоит в хвосте модели), то надо увеличивать длину проводов от мотора до контроллера. Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см. Кроме того, длинные провода до батареи могут вызывать проблемы при резком старте мотора — контроллер может не перейти от режима старта к рабочему режиму при слишком резком прибавлении “газа”. Для предотвращения этого эффекта во многих контроллерах есть специальные настройки.
Настройки
Практически все современные контроллеры имеют множество программных настроек. От них зависит режим работы, надежность, а иногда и работоспособность контроллера в паре с тем или иным мотором. Здесь мы попробуем перечислить основные настройки, и объяснить, как и на что они влияют. Напряжение выключения мотора (cut-off voltage) – при каком минимальном напряжении на батарее мотор будет выключен. Эта функция предназначена для сохранения работоспособности аппаратуры при разряде батареи и для защиты самой батареи от переразряда (последнее особенно важно для литий- полимерных аккумуляторов). На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически. Тип выключения мотора (cut-off voltage) – как правило имеет 2 значения — плавный (soft cut-off) и жесткий (hard cut-off). При плавном выключении мотора контроллер сбрасывает обороты постепенно, не позволяя напряжению на батарее упасть ниже заданного, при этом контроль над моделью сохраняется до последнего. При жестком — мотор немедленно останавливается если зафиксированно падение напряжения ниже заданного. Жесткое отключение может доставить некоторые неудобства при разряженном аккумуляторе: манипулируя газом, вместо небольшой прибавки оборотов иногда получается полный останов мотора. Тормоз (brake) – торможение мотора после установки газа в «ноль». Может иметь значения включен/выключен, на некоторых контроллерах есть еще программируемая величина тормоза 50-100% и задержка включения тормоза после полного сброса газа. Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров. В некоторых контроллерах, например том же Jeti серии «Advanced» тормоз и плавное выключения мотора – установки взаимоисключающие – для включения плавного отключения мотора надо выключить тормоз и наоборот. Намудрили чехи, однако. Опережение (Timing) – параметр, от которого зависит мощность и КПД двигателя. Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток. Режим старта (start mode) — не имеет как правило каких-то числовых значений, описывается только как мягкий, (soft) жесткий (hard), быстрый (fast) и пр. Быстрый старт рекомендуется для моторов без редукторов и для использования в соревнованиях. При использовании быстрого старта в моторах с редукторами возможно повреждение шестерен. Плавный старт обеспечивает меньшие пусковые токи в момент старта и позволяет избежать возможных перегрузок по току контроллера, но время раскрутки мотора до полных оборотов увеличивается. Время акселерации или задержка акселерации (acseleleration time или acseleration delay) – устанавливает время набора оборотов после старта до максимума. Устанавливается меньше для моторов с легкими пропеллерами без редукторов и больше для моторов с редукторами и в случае срабатывания защиты по току при резком прибавлении газа. Ограничение тока (Curent limiting) – уровень срабатывания защиты по току. Устанавливается более чувствительным в случае применения моторов с большим стартовым током и батарей с высоким внутренним сопротивлением. При этом желательно установить плавное отключение мотора, в противном случае при резких манипуляциях газом мотор будет останавливаться. Не рекомендуется отключать защиту по току, если вы не уверены ,что ток мотора не может превысить максимально допустимое значение для контроллера. Это может привести к повреждению контроллера большими стартовыми токами. Режим газа (throttle type или throttle mode) – устанавливает зависимость оборотов мотора от ручки газа. Может иметь значения автокалибровки ( auto calibrating ) – при этом контроллер самостоятельно определяет положение малого и полного газа, а также фиксированный ( fixed ) — когда характеристика задана производителем. Также в некоторых контроллерах присутствует режим «гувернер» (governor), он предназначен для вертолетов, когда положению ручки газа соответствуют определенные обороты, а не мощность двигателя, контроллер в данном режиме работает как автоматическая система поддержания оборотов, прибавляя мощность при увеличении нагрузки на двигатель. Реверс (reverse) — смена направления вращения. Обычно для изменения направления вращения двигателя надо поменять местами любые два провода от мотора. Но в продвинутых контроллерах, возможно изменить направление вращения мотора программно.
Возможные проблемы
Как показывает практика — 70% проблем при использовании контроллеров связано со стартом двигателей. Если мотор у вас плохо стартует, то есть начинает вращаться, а потом останавливается — большинство причин кроется в больших бросках тока и как следствие, провалах питающего напряжения. В первую очередь проверьте провода до батареи. Пробную проверку лучше производить на той длине проводов, которые даны изготовителем, или короче. Далее — попробуйте снять нагрузку с мотора и проверить его на холостом ходу. Если на хостом ходу все в порядке, а при установке пропеллера мотор упорно не желает крутится, только дергается в одном направлении, попробуйте поставить мягкий старт или увеличить время акселерации. Также здесь поможет установка плавного выключения мотора. Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима — опять же читайте инструкцию, чтобы установить, произошло срабатывание токовой защиты или нет. Старые «золотые» Jeti серия Jes 18, отличаются, например одной особенностью — у них нет плавного выключения, и при попытке работы мотора с большими пусковыми токами от старых аккумуляторов, при резком движении ручкой газа мотор останавливается, если напряжение упало до 5.2 вольта. Это не неисправность контроллеров, это у них такой алгоритм выключения мотора: напряжение упало — мотор остановился. Иногда бывает, что мотор стартует в другую сторону, набирает примерно 20-30% оборотов, потом «одумывается», и резко начинает крутится в нужном направлении. Останов и реверс сопровождаются резким броском тока, иногда срабатывает токовая защита. Данная ситуация происходит только с 2-3х витковыми двухполюсными спортивными моторами при наличии резкого старта. Причем мотор ведет так себя не всегда, примерно в 10% случаев. Выход из этой ситуации — опять же использование плавного старта.
Контрольные вопросы
- Зачем нужны датчики в бесколлекторных электродвигателях?
- На что влияет количество фаз в бесколлекторном электродвигателе?
- Перечислите основные характеристики контроллеров.
- Какие ошибки при подключении контроллеров возможно допустить?
- К каким последствиям могут привести эти ошибки?
- Перечислите возможные настройки контроллера.
Ответы на вопросы прикрепляйте в комментарии к данной статье!
Управление бесколлекторным двигателем постоянного тока в комбинированном режиме
Авторы работы: И. Джанпан, Р. Чайсричароен, П. Буньянант, Тайланд. Перевод материала выполнен специалистами ИНЕЛСО.
Аннотация
Считается, что бесколлекторный двигатель постоянного тока (BLDC) отличается хорошими эксплуатационными характеристиками: не требует высоких затрат на техническое обслуживание, является достаточно универсальным, обладает приемлемым крутящим моментом и скоростью вращения, а также высокой надежностью. Как правило, самый простой BLDC-двигатель состоит из ротора с постоянными магнитами и трех обмоток статора. На каждом шаге управления две из трех обмоток участвуют в создании вращающего магнитного поля, в то время как в обесточенной обмотке наводится обратная электродвижущая сила (ЭДС) и возникает паразитный электрический ток, поступающий на вход контроллера. В данной работе предложена схема управления BLDC-двигателем в комбинированном режиме, в котором генерируемый ток запасается с помощью дополнительной коммутационной схемы для дальнейшего использования. Таким образом, BLDC-двигатель может приводить в движение нагрузку одновременно с выработкой электроэнергии. Предлагаемая коммутационная схема была разработана и смоделирована в ПО PSpice. Результаты моделирования показывают, что на накопительную емкость может быть подано до 75% от входного напряжения.
1. Введение
В нашем быстро меняющемся мире производство электроэнергии является крайне важным, ведь количество используемых нами электроприборов и потребляемого электричества сейчас выше, чем когда-либо. Для преобразования физической энергии в электрическую было изобретено несколько типов устройств. Основным устройством для преобразования механической энергии в электрическую, и последующего её накопления в аккумуляторных батареях, является генератор. Обратное преобразование электрической энергии в механическую осуществляется с помощью электродвигателя.
В данной статье предложен новый способ управления, позволяющий электродвигателю одновременно генерировать электрическую и механическую энергию. Здесь рассматривается бесколлекторный двигатель постоянного тока (BLDC). Поскольку BLDC-двигатель содержит вращающиеся постоянные магниты и неподвижный якорь, следовательно, подача тока на движущийся ротор больше не является проблемой. BLDC-двигатели обладают рядом преимуществ перед щеточными двигателями постоянного тока и асинхронными двигателями, включая больший крутящий момент на единицу веса и более высокий КПД, имеют пониженный уровень шума, обладают повышенной надежностью и более длительным сроком службы (отсутствует износ щеток и коллектора), а также лишены такого недостатка, как искрение коллектора.
BLDC-двигателями можно управлять в 3 режимах: в режиме двигателя, в режиме генератора, и гибридном. Для управления устройством в режиме двигателя было предложено несколько методов. В [1] Ситай и соавторы выбрали в качестве схемы управления трехфазное двухполупериодное мостовое подключение звездой и проанализировали три схемы замкнутых систем управления с DSP. Ясухиро и др. [2] рассматривали небольшую систему BLDC-двигателя. Они предложили конструкцию, основанную на однонаправленных потоках тока. В [3, 4] для управления двигателем на базе DSP, используется трехфазный ШИМ контроллер. В работе было предложено управление BLDC-двигателем с помощью регулятора на базе нечеткой логики без датчиков. В [5] вместо дорогих датчиков Холла для определения точки пересечения нуля сигнала обратной ЭДС на невозбужденной фазе, используются два сопротивления. Система управления с нечеткой логикой реализована на микроконтроллере.
В [6, 7] было предложено несколько методов с использованием синхронного выпрямителя и преобразователя для управления устройством в режиме генератора. В [8] постоянный магнит в роторе BLDC-генератора заменен вспомогательной катушкой возбуждения.
Управление устройством в гибридном режиме является главной проблемой в этой области. Гибридный режим – это способ управления, позволяющий устройству работать попеременно двигателем и генератором. В [9] Ким и др. рассмотрели методы управления, которые минимизируют пульсации крутящего момента и максимизируют удельную мощность BLDC-двигателя/генератора постоянного тока в электромобилях и гибридных автомобилях. Кроме того, в [10] была предложена конструкция гибридной системы 20-ти кВт BLDC-двигателя на постоянных магнитах (PM). В статье описана PM BLDC-двигатель, подключенная к дизельному двигателю автомобиля объемом 1,9 л, вырабатывающая электроэнергию для зарядки высоковольтной системы накопления энергии и для приведения в действие асинхронного двигателя, присоединенного к задним колесам. Устройство также может использовать накопленную энергию для запуска двигателя или содействия основному двигателю при разгоне автомобиля. В [11] Афджей и Торкаман сравнили два новых типа конфигурации двигатель/генератор, вентильный реактивный электродвигатель (ВРД) и BLDC-двигатель без постоянных магнитов.
Отметим, что в обычных гибридных системах устройство поочередно переключается между режимами двигателя и генератора. В данной статье предлагается новый метод управления, который позволяет накапливать энергию во время работы двигателя. Статья структурирована следующим образом: работа системы управления BLDC-двигателем в комбинированном режиме обсуждается в разделе 2; имитационная модель и результат моделирования приведены в разделах 3 и 4, соответственно. Выводы приведены в разделе 5.
2. Управление BLDC-двигателем в комбинированном режиме
В данном разделе описаны вопросы комбинированного режима управления BLDC-двигателем. В предлагаемом режиме генерация и накопление электроэнергии в батареях происходит одновременно с его работой.
Обычно трехфазный BLDC-двигатель имеет три обмотки статора, однако их количество может быть увеличено для уменьшения пульсации крутящего момента. На рисунке 1 приведена электрическая схема статора, состоящего из трех обмоток A, B и C. Ротор BLDC-двигателя содержит четное количество постоянных магнитов. Число магнитных полюсов в роторе также влияет на размер шага и пульсацию крутящего момента двигателя. Чем больше количество полюсов, тем меньше шаг двигателя и пульсация крутящего момента. BLDC-двигателя с одной парой полюсов показан на рис. 1.
Если на обмотки двигателя правильно подано питание, возникает магнитное поле, и ротор приводится в движение. Наиболее простым методом коммутационного управления, используемым для BLDC-двигателей, является схема включения-выключения: через обмотку либо проходит ток, либо нет. В 3-фазном BLDC-двигателе питание подается одновременно только на две обмотки, а третья обмотка остается обесточенной.
В предложенном комбинированном режиме управления устройством неактивная обмотка используется для генерации электроэнергии во время работы двигателя.
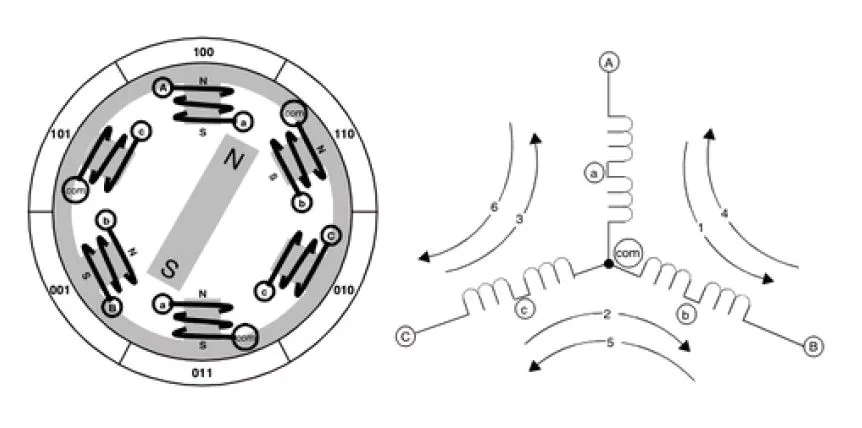
Рис. 1. Упрощенные схемы BLDC -двигателей [13]
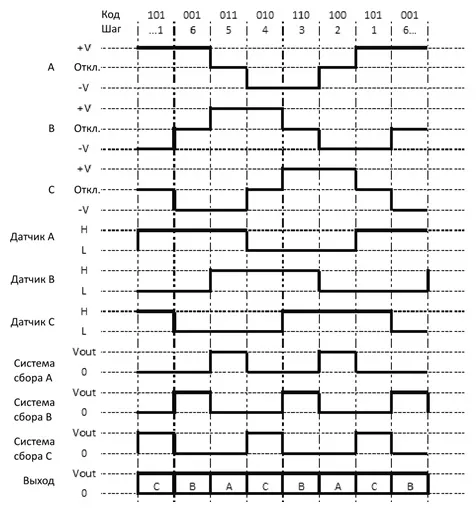
Рис. 2. Временная диаграмма работы BLDC-двигателя
Для создания вращающего магнитного поля, толкающего ротор, производится одновременная подача энергии на 2 фазы BLDC-двигателя. Статическое выравнивание, показанное на рис. 2, может быть задано за счет прохождения электрического тока от клеммы A к клемме B (путь тока отмечен на схеме рис.1 цифрой 1). Ротор можно заставить повернуться по часовой стрелке на 60 градусов от положения A-B, обеспечив протекание тока от клеммы C к B (этот путь тока отмечен на схеме цифрой 2). Если непрерывно приводить двигатель в действие таким образом, то он может совершить полный оборот на 360° при достижении конечного шага №6. Как видно из временной диаграммы, приведенной на рис. 2, электрическая энергия может быть получена на выходе, когда постоянное магнитное поле ротора движется сквозь обесточенную обмотку. При этом каждая обмотка может генерировать электроэнергию дважды за один оборот.
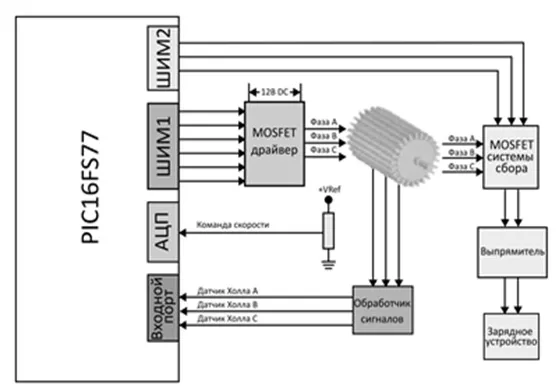
Рис. 3. Структурная схема аппаратной части системы
На рис. 3 показана структурная схема предлагаемой системы управления BLDC-двигателем в комбинированном режиме. Здесь в качестве входных данных для микроконтроллера PIC16F877 служат команда скорости и сигнал от датчиков Холла. Микроконтроллер осуществляет вычисление управляющей переменной с помощью определенного алгоритма, и преобразует её в PWM (ШИМ) сигнал. PWM1 – это сигнал управления драйвером MOSFET, используемым для вращения двигателя, в то время как PWM2 используется для управления транзисторами MOSFET системы сбора электрической энергии с обесточенной обмотки. На рис. 4 приведена подробная электрическая принципиальная схема ключей MOSFET, соответствующая блок-схеме, представленной на рис. 3. В процессе работы 8 MOSFET-транзисторов будут задействованы для управления двумя активными обмотками, создающими вращающее магнитное поле (режим двигателя), в то время как два других MOSFET-транзистора обеспечат возможность запасания энергии, полученной от неактивной обмотки, системой (режим генератора).
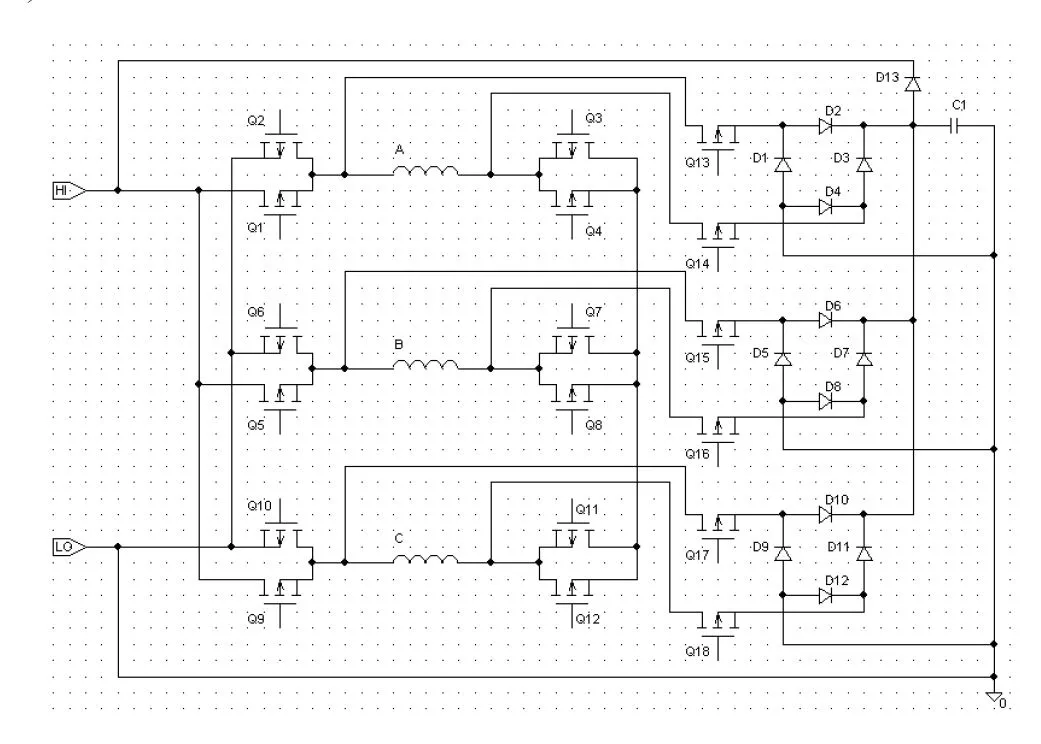
Рис. 4. Схема драйвера комбинированного режима
Для управления ключами MOSFET рассмотрена схема двигателя, приведенная на рис. 1 и временная диаграмма, показанная на рис. 2. В таблице 1 по шагам расписано управляющее воздействие, подаваемое на MOSFET-транзисторы в соответствии с сигналом, поступающим с датчиков Холла.
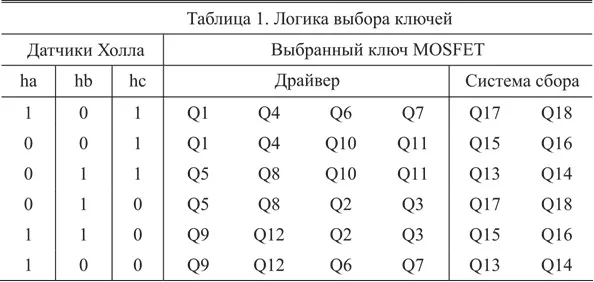
Таблица 1. Временная диаграмма для комбинированного режима управления, состоящая из 6 шагов
3. Моделирование системы
На рис. 5 приведена предлагаемая нами схема управления, смоделированная в ПО PSpice – программе, предназначенной для симуляции аналоговой и цифровой логики. В качестве модели обмотки статора трехфазного BLDC-двигателя на симуляции был использован трансформатор. Моделируемая схема управляется в соответствии с 6 ступенчатой временной диаграммой, приведенной на рис. 2.
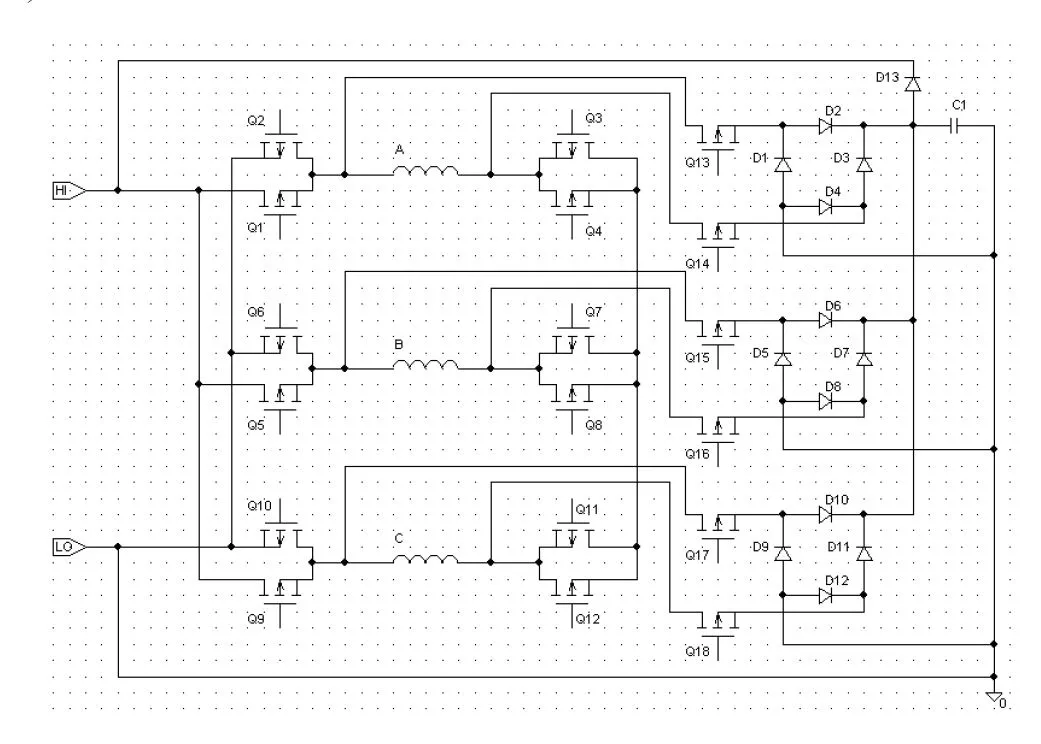
Рис. 5. Схема предлагаемой системы комбинированного режима управления BLDC-двигателем, смоделированная в PSpice.
4. Результат моделирования
В этом разделе представлены некоторые результаты моделирования схемы комбинированного режима управления BLDC-двигателем/генератором для случая, когда BLDC-двигатель работает от постоянного входного напряжения 12В при 150 об/мин.
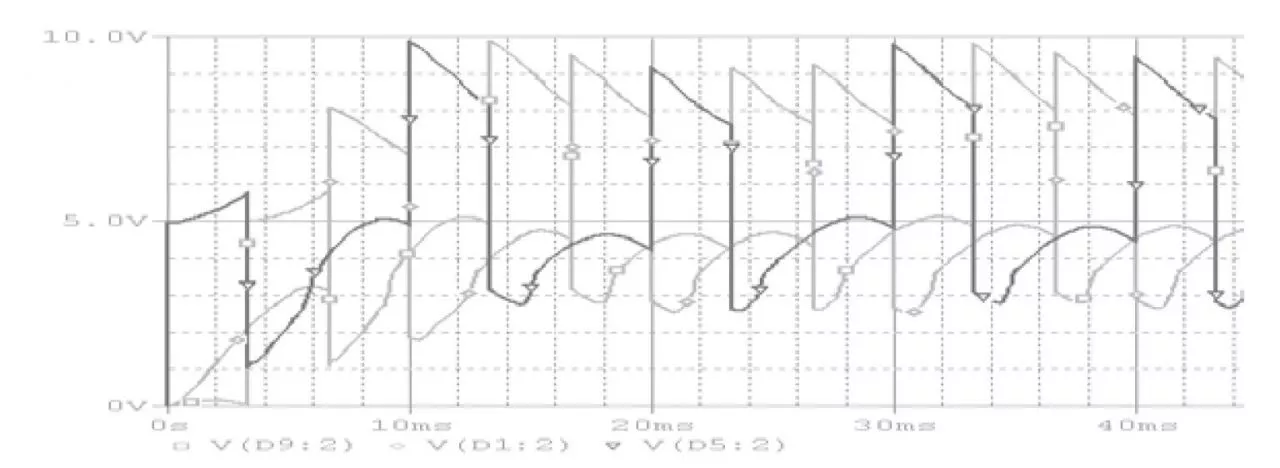
Рис. 6. 3-фазный выходной сигнал для комбинированного режима управления (моделирование)
На рисунке 6 приведены графики выходного напряжения, получаемого от каждой неактивной обмотки, во время работы BLDC-двигателя в комбинированном режиме. На рис. 7 и 8 приведены графики выходного напряжения, полученного на нагрузке 100 кОм и без нагрузки соответственно.
Здесь мы отметили, что выходные напряжения меняется в зависимости от величины нагрузки. Это должно наблюдаться и в реальном эксперименте с использованием зарядной цепи.
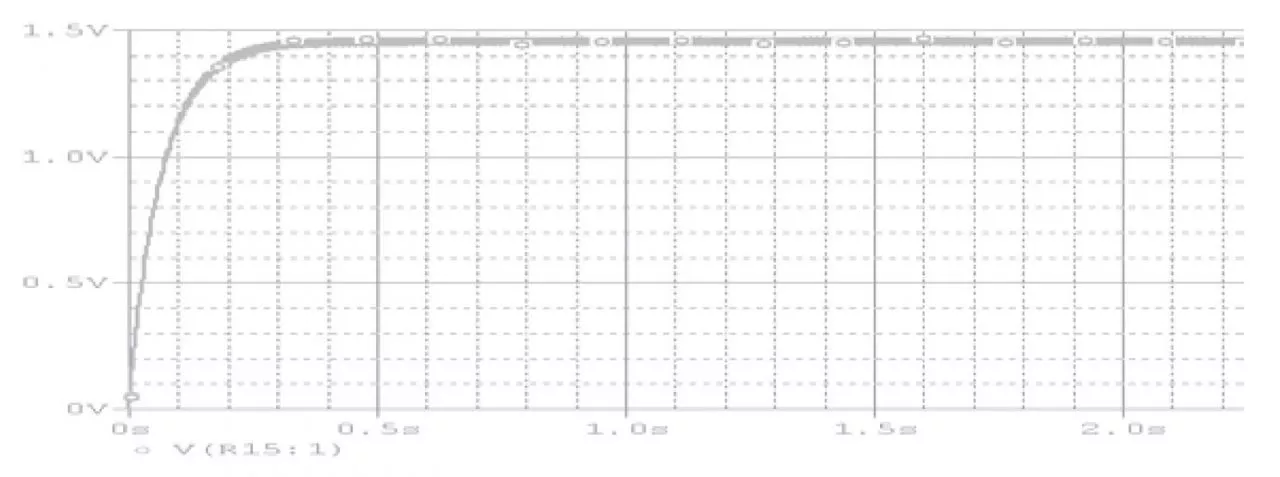
Рис. 7. Выходное напряжение при работе двигателя в комбинированном режиме на нагрузке 100 кОм
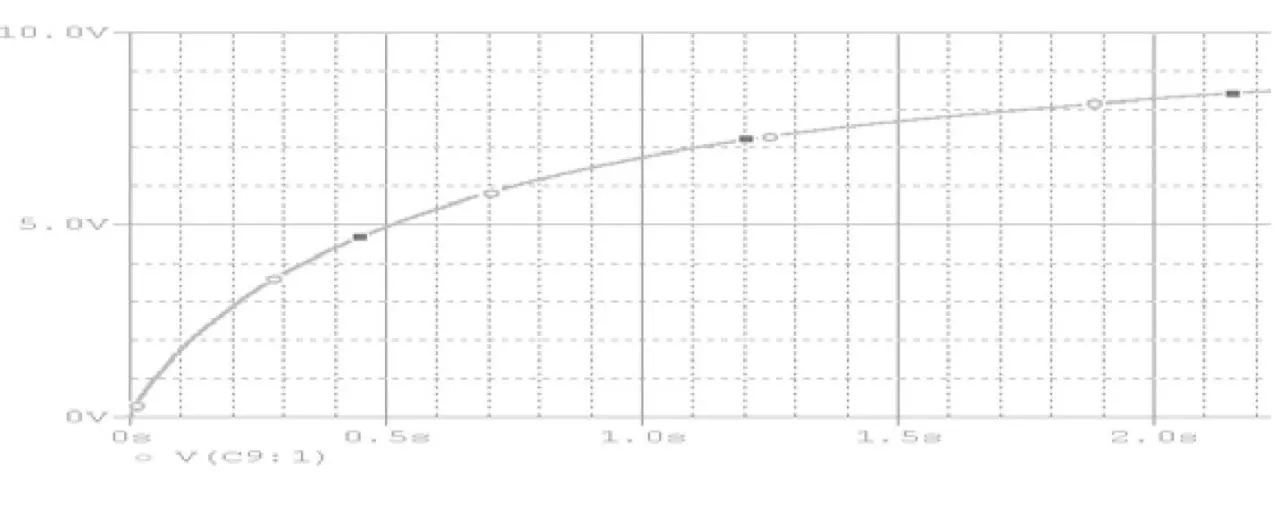
Рис. 8. Выходное электрическое напряжение при работе двигателя в комбинированном режиме на холостом ходу
5. Заключение
В статье предложен комбинированный режим управления BLDC-двигателем, в котором электроэнергия может быть получена во время работы двигателя. Для выработки электроэнергии, которая может быть подана обратно в систему или запасена в аккумуляторе для других целей, используется преимущества обесточенной обмотки BLDC-двигателя.
Было проведено моделирование в ПО PSpice. Результаты показывают, что, используя данный режим работы, мы можем получить выходные напряжения, составляющие около 75% от входного (9В от напряжения входа 12В), в отсутствие нагрузки. Реальная реализация предложенной системы будет дополнительно изучена.
Авторы статьи: И. Джанпан а , Р. Чайсричароен б , П. Буньянант а
а Школа информационных технологий, Университет Маэ Фа Луанг, Чианграй, 57100 Таиланд
б Кафедра вычислительной техники, инженерный факультет Кампхаенг саен, Кампус Университета Касетсарт Кампхаенг саен, Накхонпатом, 73140 Таиланд
Список литературы
[1] Wang Xitai, Zhang Xuexiu, Li Lifeng, Liu Bingshan. Brushless DC Motor Speed Control System of the Walking Aids
Machine. IEEE/ICINIS; 2009, p. 589-592
[2] Komatsu Yasuhiro, Tur-Amgalan Amarsanaa, Yoshihiko Araki, Syed Abdul Kadir Zawawi, Takamura Keita. Design of the
Unidirectional Current Type Coreless DC Brushless Motor for Electrical Vehicle with Low Cost and High Efficiency.
IEEE/SPEEDAM; 2010, p. 1036-1039
[3] Sun Chunxiang, Mo Bo. Design of Control System of Brushless DC Motor Based on DSP. IEEE/ICICTA;2010, p. 11-14
[4] Chengang Zhao and Yaochun Wu . The Design of Brushless DC Motor Controller. IEEE; 2010, p. 729-731
[5] Jung-Sheng Wen, Chi-Hsu Wang, Ying-De Chang, Ching-Cheng Teng. Intelligent Control of High-Speed Sensorless
Brushless DC Motor for Intelligent Automobiles. IEEE/SMC; 2008, p. 3394-3398
[6] Orner c. Onar, Yusuf Gurkaynak, and Alireza Khaligh. A Brushless DC Generator & Synchronous Rectifier for Isolated
Telecommunication Stations. IEEE/INTLEC; 2009, p. 1-6
[7] G. Gatto – I. Marongiu – A. Perfetto (*) – A. Serpi . Brushless DC Generator controlled by Constrained Predictive
Algorithm. IEEE; 2010, p. 1224-1229
[8] H. Moradi, M. Seyed Yazdi and E. Afjei. Brushless dc Generator without Permanent Magnet. IEEE/SPEEDAM; 2010, p.
[9] Taehyung Kim, Hyung-Woo Lee, Leila Parsa, Member, and Mehrdad Ehsani4. Optimal Power and Torque Control of a
Brushless DC (BLDC) Motor/Generator Drive in Electric and Hybrid Electric Vehicles. IEEE; 2006, p. 1276-1281
[10] S. M. N. Hasan, I. Husain, R. J. Veillette and J. E. Carletta. A PM Brushless DC Starter/Generator System for a Series#Parallel 2×2 Hybrid Electric Vehicle. IEEE; 2007, p. 1686-1689
[11] E.Afjei, H.Torkaman . Comparison of Two Types of Hybrid Motor/Generator. IEEE/SPEEDAM; 2010, p. 982-986#