Потери энергии и кпд асинхронных двигателей

В электрическом двигателе при преобразовании одного вида энергии в другой часть энергии теряется в виде теплоты, рассеиваемой в различных частях двигателя. В электрических двигателях имеются потери энергии трех видов: потери в обмотках , потери в стали и механические потери . Кроме того, имеются незначительные добавочные потери .
Потери энергии в асинхронном двигателе рассмотрим при помощи его энергетической диаграммы (рис. 1). На диаграмме Р1 — мощность, подводимая к статору двигателя из сети. Основная часть Рэм этой мощности, за вычетом потерь в статоре, передается электромагнитным путем на ротор через зазор. Рэм называется электромагнитной мощностью.
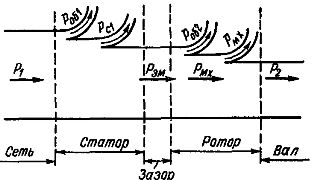
Рис. 1. Энергетическая диаграмма двигателя
Потери мощности в статоре складываются из потерь мощности в его обмотке P об1 = m1 х r1 х I1 2 и потерь в стали P с1 . Мощность P с1 является потерями на вихревые токи и на перемагничивание сердечника статора.
Потери в стали имеются и в сердечнике ротора асинхронного двигателя, но они невелики и могут не приниматься во внимание. Это объясняется тем, что скорость вращения магнитного потока относительно статора n0 во много раз больше скорости вращения магнитного потока относительно ротора n0 — n , если скорость вращения ротора а синхронного двигателя n соответствует устойчивой части естественной механической характеристики.
Механическая мощность асинхронного двигателя Рмх, развиваемая на валу ротора, меньше электромагнитной мощности Рэм на значение мощности P об2 потерь в обмотке ротора:
Рмх = Рэм — P об2
Мощность на валу двигателя:
где p мх — мощность механических потерь, равная сумме потерь на трение в подшипниках, на трение вращающихся частей о воздух (вентиляционные потери) и на трение щеток о кольца (для двигателей с фазным ротором).
Электромагнитная и механическая мощности равны:
Рэм = ω0 M , Рмх = ω M ,
где ω0 и ω — синхронная скорость и скорость вращения ротора двигателя; М — момент, развиваемый двигателем, т. е. момент, с которым вращающееся магнитное поле действует на ротор.
Из этих выражений следует, что мощность потерь в обмотке ротора:

или P об2 = s х P эм
В случаях, когда известно активное сопротивление г2 фазы обмотки ротора, потери в этой обмотке могут быть найдены также из выражения P об2 = m 2 х r 2 х I2 2 .
В асинхронных электродвигателях имеются также добавочные потери, обусловленные зубчатостью ротора и статора, вихревыми токами в различных конструктивных узлах двигателя и другими причинами. При полной нагрузке двигателя потери P д принимаются равными 0,5% его номинальной мощности.
Коэффициент полезного действия (КПД) асинхронного двигателя:
η = P2 / P1 = (P1 — (P об — P с — P мх — P д) ) / P1,
где Роб = P об 1 + Роб2 — суммарная мощность потерь в обмотках статора и ротора асинхронного двигателя.
Поскольку общие потери зависят от нагрузки, то и КПД асинхронного двигателя является функцией нагрузки.
На рис. 2, а дана кривая η = f (Р/Рном), где Р/Рном — относительная мощность.
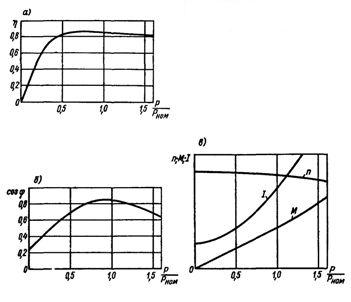
Рис. 2. Рабочие характеристики асинхронного двигателя
Асинхронный электродвигатель конструируется так, чтобы максимум ее коэффициента полезного действия η max имел место при нагрузке, несколько меньшей номинальной. КПД двигателя достаточно высок и в широком диапазоне нагрузок (рис. 2, а). Для большинства современных асинхронных двигателей КПД имеет значение 80 — 90%, а для мощных двигателей 90 — 96%.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
УЧЕТ ПОТЕРЬ ВСТАЛИ, НАСЫЩЕНИЯ И ПОВЕРХНОСТНОГО ЭФФЕКТА ПРИ МОДЕЛИРОВАНИИ ПРОЦЕССОВ В ЧАСТОТНО-РЕГУЛИРУЕМОМ АСИНХРОННОМ ЭП
УЧЕТ ПОТЕРЬ ВСТАЛИ, НАСЫЩЕНИЯ И ПОВЕРХНОСТНОГО ЭФФЕКТА ПРИ МОДЕЛИРОВАНИИ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ЧАСТОТНО-РЕГУЛИРУЕМОМ АСИНХРОННОМ ЭЛЕКТРОПРИВОДЕ
А.Б. Виноградов
Ивановский государственный энергетический университет
Для исследования динамики асинхронного двигателя (АД) и решения задач синтеза динамических режимов асинхронного электропривода наиболее часто применяются математические модели на основе уравнений Парка-Горева [1], не учитывающие потери в стали, эффекты насыщения магнитной системы и вытеснения тока в стержнях ротора. В некоторых режимах это приводит к существенным количественным и качественным отклонениям расчетных динамических и статических характеристик привода от реальных. Учет каждого из этих эффектов в отдельности и, тем более, их совместное рассмотрение сопряжено со значительными трудностями, среди которых: проблема определения параметров модели, сложные зависимости параметров от переменных привода (токов, потокосцеплений, частоты токов статора и ротора); существенное усложнение системы уравнений и алгоритмов расчета. Известные математические модели либо учитывают только часть этих эффектов, например, насыщение цепи намагничивания, либо настолько сложны, что плохо подходят для применения в задачах анализа и синтеза динамических процессов в асинхронном электроприводе, в частности, в электроприводе с преобразователями частоты. Особенно это проявляется при решении задач анализа и синтеза динамических процессов в реальном времени работы электропривода.
Важность задачи учета потерь в стали по крайней мере при работе АД с нагрузками, не превышающими номинальную, определяется существенным вкладом этих потерь в суммарные потери машины. Так, для АД серии 4А потери в стали могут составлять >20% от полных потерь номинального режима и >50% от полных потерь холостого хода. Неучет этих потерь при анализе энергетических характеристик привода приводит к существенным погрешностям. Небольшое влияние потери в стали оказывают также на величину и взаимную ориентацию обобщенных векторов электромагнитных переменных АД (напряжения, токов, потокосцеплений) в статических и динамических режимах работы.
Известен подход [4] к учету потерь в стали от вихревых токов путем включения паралельно цепи намагничивания Т- образной схемы замещения двигателя эквивалентных RL- цепей с сосредоточенными параметрами, отдельных для описания процессов в стали статора и ротора. Основные недостатки данного метода: во-первых, он учитывает только одну составляющую потерь в стали, тогда как потери от гистерезиса, в частности, в двигателях серии 4А на номинальных частотах соизмеримы с потерями от вихревых токов, а на частотах, меньших номинальной, потери от гистерезиса могут существенно превосходить потери от вихревых токов. Во-вторых, существует серьезная проблема, связанная с определением параметров данных эквивалентных цепей, особенно индуктивности. Предложенный в [4] метод основан на использовании дополнительной измерительной обмотки, встраиваемой в двигатель, что само по себе неудобно, а также на сомнительном допущении, что во всех режимах работы коэффициент отношения индуктивного и активного сопротивлений эквивалентной цепи потерь в стали постоянен и равен 0.6. Это соотношение, введенное Нейманом Л.Р., было использовано в [5] для случая массивного ротора и распространено в [4] на шихтованные сердечники. Строго говоря, это допущение можно считать справедливым только при явно выраженном поверхностном эффекте, при котором:
где — минимальный геометрический размер массивного участка магнитопровода; — эквивалентная глубина проникновения.
Для электротехнических сталей при частоте 50 Гц . То есть для шихтованных стальных сердечников с толщиной листов 0.5 mm это условие не выполняется.
Известен подход [6] к учету потерь встали путем введения в систему уравнений Парка-Горева угла потерь. Это позволяет не увеличивать общего количества дифференциальных уравнений системы. Основной недостаток такого подхода заключается в том, что при частотном управлении угол потерь является функцией не одной, а как минимум двух переменных, например, потокосцепления взаимоиндукции и частоты. Алгебраические уравнения связи потокосцеплений и токов при этом оказываются довольно громоздкими.
Использование традиционных методов учета потерь в стали [2,3] путем включения дополнительных сопротивлений паралельно либо последовательно цепи намагничивания эквивалентной Т- образной схемы замещения фазы АД приводит к тому, что при частотном управлении эти сопротивления также являются функциями как минимум двух переменных.
Для описания динамических процессов АД с учетом эффекта насыщения цепи намагничивания широко используются два метода: метод статических индуктивностей, в котором индуктивность намагничивания задается своей статической зависимостью [7] и метод динамических индуктивностей [8]. Последний является существенно более сложным и применяется реже. Сравнение результатов расчета переходных процессов прямого пуска АД, выполненного с использованием обоих методов при прочих равных условиях [12], показывает их близость друг к другу. Результаты расчетов должны сходиться практически полностью, если для расчета индуктивностей в обоих методах используется одна и та же зависимость потокосцепления от тока взаимоиндукции , полученная для конкретного типа двигателя.
В статье рассматриваются основные результаты разработки динамических моделей асинхронного двигателя, питаемого от преобразователя частоты, с учетом потерь в стали от гистерезиса и вихревых токов, насыщения участков магнитной системы двигателя основным магнитным потоком и потоками рассеяния, эффекта вытеснения тока в стержнях короткозамкнутой обмотки ротора. Основные требования к модели: динамическая модель должна быть адекватна реальному объекту в рабочих диапазонах изменения всех его переменных; иметь минимальное количество дифференциальных уравнений; все параметры модели должны быть либо константами, либо функциями одной из переменных состояния; количество параметров модели, изменяющихся в зависимости от режима работы двигателя должно быть минимальным; алгоритм расчета процессов по возможности должен быть прямым, то есть не допускающим итераций.
При разработке модели были приняты следующие допущения:
1) частота основной гармоники и частота модуляции выходного напряжения преобразователя разнесены таким образом, что «медленные» процессы могут рассматриваться независимо от «быстрых»;
2) имеется симметрия электрических и магнитных цепей двигателя;
3) потери встали ротора пренебрежимо малы относительно других видов потерь;
4) эффект насыщения магнитной системы основным магнитным потоком и потоками рассеяния, а также эффект вытеснения тока в роторе учитываются зависимостями параметров АД от его переменных, полученными в установившихся режимах работы;
5) пренебрегаем влиянием гистерезиса стали на форму токов и потокосцеплений двигателя.
Характер изменения переменных и параметров АД в различных статических режимах работы частотно-регулируемого электропривода был исследован с помощью уточненной модели, построенной на основе известных [2,3] методов расчета и проектирования АД с учетом его конструктивных параметров и адаптации методов под задачи частотного управления. Показатели точности расчета параметров и переменных АД этими методами относительно экспериментальных данных, получаемых на реальных объектах, хорошо известны из теории электрических машин. В качестве примера использования данной модели для расчета параметров АД, на рис. 1 представлены зависимости активного сопротивления и индуктивности рассеяния ротора от частоты тока ротора (а), зависимости индуктивностей рассеяния статора и ротора от тока статора (б) и зависимость индуктивности взаимоиндукции от потокосцепления взаимоиндукции для двигателя 4А250S4У3, мощностью 75 кВт.
Рис. 1. Зависимости параметров асинхронного двигателя 4А250S4У3 от его переменных
В качестве базовых значений переменных и параметров здесь приняты: номинальное значение тока статора; потокосцепление взаимоиндукции, полученное в режиме холостого хода при номинальных значениях напряжения и частоты статора; активное сопротивление ротора, индуктивности рассеяния статора и ротора, полученные в режиме холостого хода.
Из анализа зависимостей видно, что в распространенном частном случае частотного и векторного управления АД с ограниченными значениями частоты тока ротора (для указанного двигателя — ) и перегрузочной способности преобразователя по току на уровне параметры могут быть с высокой степенью точности приняты постоянными. В случае, если при управлении АД, его потокосцепление изменяется в широких пределах, неучет изменения индуктивности взаимоидукции будет приводить к существенным погрешностям в расчетах.
Предлагаемый метод учета потерь в стали для исследования динамических процессов в частотно-управляемом электроприводе основан на разделении составляющих потерь на потери от гистерезиса и вихревых токов. Дополнительно примем следующие допущения: суммарные потери от гистерезиса пропорциональны квадрату потокосцепления взаимоиндукции и частоте основной гармоники поля; суммарные потери от вихревых токов пропорциональны квадрату потокосцепления взаимоиндукции и квадрату частоты. Эти допущения позволяют описать потери встали с помощью введения в динамическую модель двигателя двух постоянных коэффициентов: коэффициента потерь от вихревых токов [Ом], коэффициента потерь от гистерезиса [Гн].
Оценка грубости таких допущений была выполнена для ряда типоисполнений АД серии 4А. В качестве эталона взята уточненная модель АД, выполненная с учетом его конструктивных параметров, принимаемых в расчет при проектировании асинхронного двигателя с короткозамкнутым ротором по методике, изложенной в [2]. Исследования показали, что в диапазоне частот (0.1…2) погрешность оценки потерь в стали при дополнительно принятых допущениях относительно их значений, полученных на уточненной модели АД, не превышает 2%. При этом, определение коэффициентов , для конкретного типа двигателя осуществляется по значениям потерь в стали (рассчитанным или экспериментально определенным по известным методикам) в двух точках рабочего диапазона частот в режиме холостого хода двигателя.
Уравнения, описывающие динамические процессы в АД с учетом потерь в стали и насыщения цепи намагничивания, запишем в векторной форме в системе координат, вращающейся с произвольной частотой [9].
где — вектор напряжения статора; — векторы токов и потокосцеплений статора, ротора, взаимоиндукции; — векторы тока и потокосцепления эквивалентного контура, учитывающего потери в стали от вихревых токов; — индуктивность контура потерь в стали от вихревых токов; — активное сопротивление фазы статора; — число пар полюсов; J – момент инерции; — частота вращения ротора электрическая; , — частота вращения ротора механическая.
Соответствующая схема замещения АД представлена на рис. 2. Потери в стали от гистерезиса учитываются дополнительной составляющей , формирующей фазовое запаздывание потокосцепления взаимоиндукции от результирующего тока магнитной цепи . При этом, полагается, что гистерезис влияет только на фазу тока и не влияет на его форму. Для магнитомягких материалов сердечников это допущение не является грубым. Строго говоря, такой подход справедлив для установившихся режимов работы двигателя, но с высокой степенью достоверности он может быть распространен и на динамические режимы.
Рис. 2. Эквивалентная схема замещения асинхронного двигателя с учетом потерь в стали
Анализ соотношения параметров представленной модели АД показывает, что постоянная времени эквивалентного контура вихревых токов много меньше остальных электромагнитных постоянных времени. Это позволяет пренебречь влиянием динамики контура вихревых токов на электромагнитные динамические процессы двигателя. В связи с этим рассмотрим важный частный случай, когда влияние вихревых токов учитывается только одним активным сопротивлением . С учетом условия после преобразования (1.1-1.8) и записи уравнений относительно получим:
где — модуль вектора потокосцепления взаимоиндукции.
Уравнения (2.1-2.3, 1.9,1.10) образуют систему уравнений, удобную для расчета динамических процессов в частотно-управляемом АД с учетом потерь в стали и насыщения цепи намагничивания. При выборе ортогональной двухфазной системы координат получим систему из семи дифференциальных уравнений. Расчет может выполняться одним из численных методов приближенного интегрирования. Шаг интегрирования выбирается из условия:
Так как шаг интегрирования, выбранный из условия (3) достаточно мал, а потокосцепление взаимоиндукции представляет собой относительно медленно изменяющуюся переменную (в сравнении с напряжением и токами статора и ротора), то с высокой точностью можно принять допущение
где — модули вектора потокосцепления взаимоиндукции на соседних шагах расчета.
В результате алгоритм расчета уравнений математической модели становится безитерационным.
В случае отсутствия симметрии в питающих напряжениях и независимом питании статорных обмоток систему уравнений (2.1-2.3, 1.9,1.10) нужно дополнить уравнением тока статора нулевой последовательности фаз [1,7]. В случае, если в рабочих режимах электропривода частота тока ротора и амплитуда тока статора выходят за пределы установленных выше ограничений, для адекватного описания динамических процессов в системе уравнений учитываются статические зависимости , полученные на уточненной модели АД с учетом его конструкции.
В качестве иллюстрации работы модели на рис.3а приведены временные диаграммы электромагнитного момента и скорости двигателя 4А250S4У3 мощностью 75 кВт в режиме прямого пуска без нагрузки. Для сравнения на рис.3б изображены временные диаграммы, которые были получены на традиционной модели Парка-Горева с постоянными значениями параметров, взятыми для номинального режима работы двигателя. Существенные отличия главным образом определяются влиянием эффектов вытеснения тока ротора, насыщения магнитной системы основным магнитным потоком и потоками рассеяния.
Рис. 3. Временные диаграммы прямого пуска АД 4А250S4У3,
полученные на уточненной динамической модели (а) и на традиционной модели Парка-Горева (б)
Определение коэффициентов потерь в стали от вихревых токов и гистерезиса осуществляется расчетным путем на основе конструктивных параметров двигателя или экспериментально. В простейшем случае для этого достаточно определить потери встали в двух точках частотного диапазона при работе двигателя в режиме холостого хода с напряжением, формируемым по закону:
С целью повышения точности данного способа оценки коэффициентов потерь частота напряжения в точках измерения выбирается таким образом, чтобы частотный отрезок между точками измерения перекрывал значительную часть, либо весь диапазон рабочих частот электропривода. Расчет коэффициентов потерь выполняется с помощью решения системы из двух алгебраических уравнений:
где — частоты, при которых производятся измерения; — сопротивления, совокупно учитывающие потери в стали от вихревых токов и гистерезиса на частотах , включенные параллельно контуру намагничивания традиционной Т- образной схемы замещения фазы АД [2,3].
С потерями встали параметры связаны следующим выражением:
где — потери встали от вихревых токов, от гистерезиса, суммарные; m – число фаз АД, — ЭДС взаимоиндукции.
Строго говоря, для вычисления потерь от гистерезиса должна использоваться не вся ЭДС взаимоиндукции , а только одна ее составляющая: , представляющая собой ЭДС вращения вектора потокосцепления взаимоиндукции. Так как другая, трансформаторная часть ЭДС , которая появляется в динамических режимах, сопровождаемых изменением модуля потокосцепления, обычно мала по отношению к ЭДС вращения в рабочих режимах привода, то такое допущение не является грубым. — модуль, единичный направляющий вектор и частота вращения вектора потокосцепления взаимоиндукции.
Если измерения потерь в стали (расчет сопротивлений , учитывающих потери в стали) произведены в нескольких точках частотного диапазона электропривода, то вычисление коэффициентов потерь от гистерезиса и вихревых токов выполняется на основе минимизации среднеквадратического значения относительной погрешности потерь или расчетных сопротивлений . Для АД 4А250S4У3 получены следующие значения коэффициентов потерь: , .
Представленная модель может использоваться для адекватного описания динамических процессов в асинхронном электроприводе с управлением от преобразователя частоты во всех типовых режимах регулирования переменных. За счет учета потерь в стали модель позволяет осуществлять точный анализ энергетических характеристик привода как в статике, так и в динамике. С учетом ограничений на частоту тока ротора и амплитуду тока статора упрощенная версия модели может использоваться для решения задач синтеза системы управления электроприводом. Модель была апробирована в составе модели асинхронного электропривода с частотным и векторным управлением. Достигнута хорошая сходимость результатов моделирования с экспериментальными данными, полученными на лабораторной установке. Лабораторная установка включает асинхронный двигатель 4А112МА6У3 мощностью 3 кВт, преобразователь частоты серии ЭПВ [10], реализующий как частотное, так и векторное управление электроприводом, нагрузочный агрегат и контрольно-измерительную аппаратуру. Все необходимые для построения модели параметры определяются в процессе автоматической настройки привода на параметры подключенного двигателя [11].
В стадии экспериментальной апробации находится метод учета дополнительных потерь в обмотках и стали двигателя, связанных с «быстрой» составляющей электромагнитных процессов, вызванной высокочастотными коммутациями ключей преобразователя частоты. В основу метода положены следующие подходы:
1) Принцип декомпозиции процессов в системе на «быстрые» и «медленные» составляющие. При этом «медленные» процессы рассматриваются независимо от «быстрых», как показано выше, а «быстрые» процессы рассматриваются с учетом «медленных».
2) Теоретически бесконечный спектр «быстрых» составляющих выходного напряжения и тока преобразователя заменяется эквивалентным по мощности гармоническим процессом с частотой основной гармоники, равной среднему значению частоты основной гармоники выходного тока. Это значение, как правило, жестко связано с частотой модуляции выходного напряжения преобразователя.
3) Анализ дополнительных потерь выполняется на основе эквивалентной схемы замещения для «быстрых» составляющих процессов. Параметры схемы замещения определяются для частоты и амплитуды эквивалентного гармонического сигнала.
Выводы.
1. Разработана динамическая модель асинхронного двигателя, питаемого от преобразователя частоты, с учетом потерь в стали от гистерезиса и вихревых токов, насыщения участков магнитной системы двигателя основным магнитным потоком и потоками рассеяния, эффекта вытеснения тока в стержнях короткозамкнутой обмотки ротора.
2. Динамическая модель адекватна реальному объекту в рабочих диапазонах изменения всех его переменных, имеет минимальное количество дифференциальных уравнений; все параметры модели представляют собой константы, либо функции одной из переменных; алгоритм расчета процессов – безитерационный.
3. Все параметры модели рассчитываются на основе конструктивных параметров машины, либо определяются экспериментально. При этом эксперимент поддается полной автоматизации в лабораторных условиях.
4. Модель может использоваться как для решения задач анализа, так и для синтеза динамических процессов в асинхронном электроприводе с управлением от преобразователя частоты, формирующего на своем выходе напряжение с частотой модуляции, существенно (как минимум на порядок) превосходящей частоту основной гармоники переменных, что позволяет рассматривать «медленные» процессы независимо от «быстрых».
Литература
1. К.П. Ковач, И. Рац. Переходные процессы в машинах переменного тока, М.-Л., Госэнергоиздат, 1963, 744 стр.
2. Проектирование электрических машин. — В 2-х кн.: кн.1/ И.П. Копылов, Б.К. Клоков, В.П. Молодкин, Б.Ф. Токарев; Под ред. И.П. Копылова.- М.: Энергоатомиздат, 1993.- 464 с.
3. Домбровский В.В., Зайчик В.М. Асинхронные машины: Теория, расчет, элементы проектирования. – Л.: Энергоатомиздат. Ленингр. отд-ние, 1990.- 368с.
4. Динамика управляемого электромеханического привода с асинхронными двигателями / Вейц В.Л., Вербовой П.Ф., Кочура А.Е., Куценко Б.Н.- Киев: Наук.думка, 1988.- 272с.
5. Куцевалов В.М. Асинхронные и синхронные машины с массивными роторами. – М.: Энергия, 1979.- 160с.
6. В.В. Якимов Проблемы учета потерь в стали при расчете переходных процессов в электрических машинах переменного тока // Тез.докл. II Международной конференции по электромеханике и электротехнологии, Часть 1. – Крым, 1-5 окт. 1996.- с. 172-174.
7. Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. – Екатеринбург: УРО РАН, 2000.- 654 с.
8. Фильц Р.В. Дифференциальные уравнения напряжений насыщенных неявнополюсных машин переменного тока, Известия вузов, «Электромеханика», №11, 1966.- с.1195-1203.
9. А.Б. Виноградов, А.Е. Круглов Динамическая модель частотно-управляемого асинхронного двигателя с учетом потерь в стали и насыщения // Тез.докл. Междунар. научно-техн. конф. «Состояние и перспективы развития электротехнологии», том 1.- Иваново, 4-6 июня 2003.- с.226.
10. Новые серии многофункциональных векторных электроприводов переменного тока с универсальным микроконтроллерным ядром / Виноградов А.Б., Чистосердов В.Л., Сибирцев А.Н. и др.// Привод и управление. –2002.- №3.- с. 5-10.
11. Виноградов А.Б., Чистосердов В.Л., Сибирцев А.Н. Адаптивная система векторного управления асинхронным электроприводом // Электротехника.- 2003.- №7.- с. 7-17.
12. Копылов И.П. Математическое моделирование электрических машин – М.: Высш. шк., 2001.- 327с.
Потери асинхронного двигателя
Работа асинхронного двигателя, как и любой другой машины, сопровождается потерями. Потери в конечном итоге, приводят к нагреву двигателя и снижению его КПД.
КПД асинхронного двигателя, представляет собой отношение полезной мощности на выходе P2 к подводимой двигателю мощности P1, выраженная в процентах

Мощность, подводимая к двигателю

где m – количество фаз, U 1 – напряжение на статорной обмотке, I 1 – ток в статорной обмотке, cosφ 1 – коэффициент мощности двигателя
Полезная мощность на выходе P2, меньше подводимой мощности P1 на величину суммарных потерь ∑P

Потери ∑P складываются из магнитных, электрических и механических потерь
В первую очередь часть подводимой мощности P1 расходуется на покрытие магнитных Pм1 и электрических Pэ1 потерь в статоре
Электрические потери в статоре

где r1 активное сопротивление обмотки статора
Магнитные потери в статоре приблизительно определяются как

где f1 – частота тока перемагничивания, которая равна частоте тока в сети. V = 1.3-1.5. Магнитные потери в роторе малы настолько, что ими при практических расчетах пренебрегают. Это связано с малой частотой перемагничивания ротора.
Мощность, оставшаяся после восполнения потерь в статоре, называется электромагнитной и равна

Электромагнитная мощность передается ротору с помощью магнитного поля, через воздушный зазор δ. Часть электромагнитной мощности затрачивается на электрические потери в роторе, которые пропорциональны скольжению

Отсюда можно получить выражение для скольжения

Не трудно заметить, что с увеличением скольжения электрические потери в роторе также увеличиваются, а это в свою очередь вызывает уменьшение КПД.
В асинхронных двигателях с фазным ротором, присутствуют потери в щеточном узле, которые обычно добавляют к электрическим потерям в роторе

где I2 – ток ротора, Uщ – падение напряжения на пару щеток
Оставшаяся мощность называется механической

Часть механической мощности расходуется на механические и добавочные потери.
К механическим, относятся потери от трения в подшипниках, щетках и вентиляционные.
К добавочным потерям относят все остальные трудно учитываемые потери, которые, как правило, состоят из пульсационных и поверхностных потерь, которые возникают в зубцах ротора и статора. Приблизительное значение добавочных потерь рассчитывается по формуле

Оставшаяся мощность представляет собой полезную мощность на валу двигателя

Рекомендуем к прочтению — Построение механической характеристики асинхронного двигателя
Потери в асинхронных машинах подразделяют на потери в стали
Основные потери в стали асинхронных двигателей рассчитывают только в сердечнике статора, так как частота перемагничевания ротора, в режимах, близких к номинальному, очень мала и потери в стали ротора даже при больших индукциях незначительны.
Масса стали ярма статора mа:

;
где γс — удельная масса стали; в расчетах принимают γс=7,8·10 3 кг/м 3 ;
Масса стали зубцов статора mz1:

;
Потери в стали основные Рст. осн:

;
где: р1.0.50 — удельные потери по табл. 44;
β — показатель степени по табл. 44;
kда и kдz — коэффициенты , учитывающие влияние на потери в стали неравномерности распределения потока по сечениям участков магнитопровода и технологических факторов;
Добавочные потери в стали, возникающие при холостом ходе, подразделяются на поверхностные (потери в поверхностном слое коронок зубцов статора и ротора от пульсации индукции в воздушном зазоре) и пульсационные потери в стали зубцов (от пульсации индукции в зубцах).
Поверхностные потери в роторе:
Для определения поверхностных потерь вначале находим амплитуду пульсации индукции в воздушном зазоре над коронками зубцов ротора В02:
где для зубцов ротора β02 зависит от отношения bш1/δ=7,4 и его значение находим из рис. 19:
Удельные поверхностные потери рпов2. Рассчитывают по В02 и частоте пульсаций индукции над зубцами:

;
где k02 — коэффициент, учитывающий влияние обработки поверхности головки зубцов ротора на удельные потери;
Полные поверхностные потери в роторе Рпов2:

;
Пульсационные потери в зубцах ротора:
Для определения пульсационных потерь вначале находим амплитуду пульсации индукции в среднем сечении зубцов ротора Впул2:

;
Массу стали зубцов ротора mz2:
Пульсационные потери в зубцах ротора Рпул2:

;
Поверхностные и пульсационные потери в статорах двигателей с короткозамкнутыми роторами со стержневой обмоткой обычно очень малы, так как в пазах таких роторов мало bш2 и пульсации индукции в воздушном зазоре над головками зубцов статора незначительны. Поэтому расчет этих потерь в статорах таких двигателей не производят.
Сумма добавочных потерь в стали Рст. доб:

;
Полные потери в стали Рст:
Механические потери Рмех. (для двигателей 2р=2 коэффициент kТ=1 и kТ=1,3·(1-Da) при 2р>2. В нашем случае коэффициент kТ=0,95):

;
Добавочные потери при номинальной нагрузке. Добавочные потери при номинальном режиме асинхронных двигателей возникают за счет действия потоков рассеяния, пульсаций индукции в воздушном зазоре, ступенчатости кривых распределения МДС обмоток статора и ротора и ряда других причин. В короткозамкнутых роторах, кроме того, возникают потери от поперечных токов, т.е. токов между стержнями, замыкающихся через листы сердечника ротора. Эти токи особенно заметны при скошенных пазах ротора. В таких двигателях, как показывает опыт эксплуатации, добавочные потери при нагрузке могут достигать 1-2% (а в некоторых случаях даже больше) от подводимой мощности. ГОСТ устанавливает средние расчетные добавочные потери при номинальной нагрузке, равны 0,5% номинальной мощности.

;
Холостой ход двигателя: При определении активной составляющей тока холостого хода принимают, что потери на трение и вентиляцию и потери в стали при холостом ходе двигателя такие же как и при номинальном режиме. Электрические потери в статоре при холостом ходе Рэ1хх приближенно принимаются равными:

;
Активная составляющая тока холостого хода Iхха:
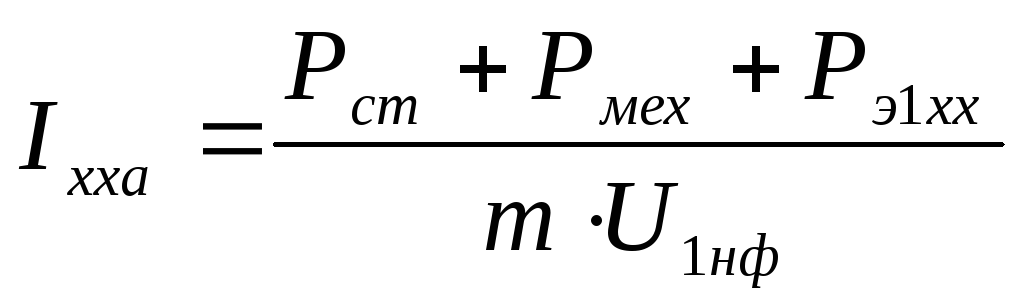
;
Реактивная составляющая тока холостого хода, равна намагничивающему току Iμ . Холостой ход двигателя Iхх:

;
Коэффициент мощности при холостом ходе cosφ:

;
- Расчет рабочих характеристик двигателя.
Методы расчета характеристик базируются на системе уравнений токов и напряжений асинхронной машины, которой соответствует Г-образная схема замещения (рис. 23). Активные и индуктивные сопротивления схемы замещения являются параметрами машины. Сопротивление r12 и х12 с достаточной для обычных расчетов точностью определяют по следующим формулам:  ,
,  ;
;
| r12, Ом | Pст.осн, Вт | U1нф, В | х1, Ом | m | Iμ, А | |
| Пример | 1.14754 | 23.859 | 220 | 2.446 | 3 | 2.633 |
| Расчет | ||||||
| Расчет |

Коэффициент с1 представляет собой взятое с обратным знаком отношение вектора напряжения фазы U1нф к вектору ЭДС. Для расчета с1 воспользуемся приближенной формулой, т.к. в асинхронных двигателях мощностью более 2-3 кВт, как правило, [γ]≤1, поэтому реактивной составляющей коэффициента c1 можно пренебречь, тогда приближенно: ,
| c1 | х12, Ом | х1, Ом | |
| Пример | 1.03 | 81.123 | 2.446 |
| Расчет | |||
| Расчет |

где ;
| х12, Ом | х1, Ом | r12, Ом | γ, рад | r1, Ом | |
| Пример | 81.123 | 2.446 | 1.14754 | 0.021 | 1.776 |
| Расчет | |||||
| Расчет |

Активную составляющую тока синхронного холостого хода определяют из выражения: ; Реактивную составляющую тока синхронного холостого хода принимаем равную току намагничивания Iор= I.
| Ioa, А | Рст.осн, Вт | Iμ, А | r1, Ом | U1нф, В | |
| Пример | 0.092 | 23.859 | 2.633 | 1.776 | 220 |
| Расчет | |||||
| Расчет |
Так как [γ]≤1 и мы используем приближенный метод, то в этом случае необходимо ввести дополнительные расчетные величины: а´=с1 2 ; а=с1r1; b´=0; b=c1(x1+c1x2’)
| а´ | b´ | b, Ом | r1, Ом | х1 | х´2 | |
| Пример | 1.061 | 0 | 6.869 | 1.776 | 2.446 | 4.098 |
| Расчет | ||||||
| Расчет |
В данном случае постоянные потери (не меняются при изменении скольжения): ΣP=Pст+Рмех=476,492 Вт .
| Рст, Вт | Рмех, Вт | ΣР, Вт | |
| Пример | 55.67 | 31.5 | 87.166 |
| Расчет | |||
| Расчет |
- Расчет пусковых характеристик.
| Р2, Вт | U1нф, В | 2р | I1н, А | х12, Ом | х´2, Ом | х1, Ом | r1, Ом | r´2, Ом | sн | |
| Пример | 4000 | 220 | 4 | 8,641 | 81.123 | 4.098 | 2.446 | 1.776 | 1.698 | 0,025 |
| Расчет | ||||||||||
| Расчет |

Рассчитываем пусковые характеристики с учетом вытеснения тока и насыщения при рабочей температуре =75 0 С, для значений скольжения S=1;0,8;0,5;0,2;0,15;0,1.Подробный расчет приведен для скольжения S=1.Остальные данные расчета сведены в таблицу 2.9.1.. Высота стержня в пазу hc: ;
| hc, м | hп2, м | h´ш2, м | hш2, м | |
| Пример | 0.021 | 0.022 | — | 0,0005 |
| Расчет | ||||
| Расчет |

По полной высоте стержня и удельному сопротивлению материала стержня (для литой алюминиевой обмотки ротора ρ115=10 -6 /20,5 Ом·м) определяют: функцию ξ: ;
| ξ | hc, м | s | |
| Пример | 1.341 | 0.021 | 1 |
| Расчет | |||
| Расчет |
В соответствии с функцией ξ находим по кривым рис.25 и рис.26 функции  и
и 
| ξ |  |
 |
|
| Пример | 1.341 | 0.233 | 0.933 |
| Расчет | |||
| Расчет |

Глубина проникновения тока в стержень обмотки. ;
| hr, м |  |
hc, м | |
| Пример | 0.017 | 0.233 | 0.021 |
| Расчет | |||
| Расчет |
В расчете условно принимаем, что при действии эффекта вытеснения, ток ротора распределен равномерно, но не по всему сечению стержня, а лишь по его верхней части, ограниченной высотой hr, имеющее сечение qr, которое находим по следующей формуле:  , где br рассчитывается по следующей формуле:
, где br рассчитывается по следующей формуле:  ;
;
| br, м | b1р, м | b2p, м | hr, м | h1р, м | |
| Пример | 0.00331 | 0,0066 | 0,0027 | 0.017 | 0.016 |
| Расчет | |||||
| Расчет |
тогда сечение стержня qr:
| qr·10 -3 , м 2 | b1р, м | br, м | hr, м | |
| Пример | 8.589·10 — 2 | 0,0066 | 0.00331 | 0.017 |
| Расчет | ||||
| Расчет |

Коэффициент kr через отношение площадей всего сечения стержня и сечения, ограниченного высотой hr: , где qc — площадь поперечного сечения стержня (см. п. 2.4.8.).
| kr | qr, м 2 | qc, м 2 | |
| Пример | 1.125 | 8.589·10 — 5 | 9.661·10 — 5 |
| Расчет | |||
| Расчет |

Коэффициент общего увеличения сопротивления фазы ротора. Для расчета характеристик необходимо учитывать изменение сопротивления всей обмотки ротора r2, поэтому удобно ввести коэффициент общего увеличения сопротивления фазы ротора под влиянием эффекта вытеснения тока: ;
| KR | r2, Ом | kr | rc, Ом | |
| Пример | 1.084 | 9.79·10 — 5 | 1.125 | 6.6·10 — 5 |
| Расчет | ||||
| Расчет |

Приведенное активное сопротивление фазы обмотки ротора с учетом вытеснения тока: ;
 |
 |
KR | |
| Пример | 1.841 | 1.698 | 1.084 |
| Расчет | |||
| Расчет |

Индуктивное сопротивление обмотки ротора. Коэффициент магнитной проводимости пазового рассеяния с учетом действия эффекта вытеснении тока λп2ξ: ;
| λп2ξ | h1, м | b1р, м | qc, м 2 | bш2, м | hш2, м | kД | |
| Пример | 1.574 | 0.016 | 6.6·10 -3 | 9.661·10 — 5 | 1·10 -3 | 0,5·10 -3 | 0,66 |
| Расчет | |||||||
| Расчет |

где kд — коэффициент демпфирования, показывает, как уменьшилась проводимость участка паза, занятого проводником с током, при действии эффекта вытеснении тока с проводимостью того же участка, но при равномерной плотности тока в стержне. Изменение индуктивного сопротивления фазы обмотки ротора от действия эффекта вытеснения тока Kx: ;
| λп2ξ | λл2 | λд2 | λп2 | Кх | |
| Пример | 0.188 | 0.44 | 4.473 | 1.762 | 0.764 |
| Расчет | |||||
| Расчет |

где п2 — коэффициент магнитной проводимости пазового рассеяния обмотки короткозамкнутого ротора л2 — коэффициент магнитной проводимости лобового рассеяния обмотки короткозамкнутого ротора. д2 — коэффициент магнитной проводимости дифференциального рассеяния обмотки короткозамкнутого ротора. Приведенное индуктивное сопротивление фазы обмотки ротора от действия эффекта вытеснения тока: ;
| х´2ξ | Kх | х´2 | |
| Пример | 3.132 | 0.764 | 4.098 |
| Расчет | |||
| Расчет |
где x`2 — приведенное индуктивное сопротивление. Ток ротора приближенно без учета влияния насыщения  :
:  ;
;
| I´2, A | U1нф, В | r1, Oм | r´2ξ, Oм | sн | x 1, Oм | x´ 2ξ, Oм | |
| Пример | 33.093 | 220 | 1.776 | 1.841 | 0,025 | 2.446 | 3.132 |
| Расчет | |||||||
| Расчет |

где r1 — активное сопротивление обмотки статора, x1=2.446Ом — индуктивное сопротивление фазы обмотки статора. Учет влияния насыщения на параметры. При расчете влиянии параметров предыдущих режимов можно было не учитывать влияния насыщения, так как токи в этих режимах относительно малы и потоки рассеяния не создают заметного падения напряжения в стали зубцов. При увеличении скольжении свыше критического и в пусковых режимах токи возрастают, и потоки рассеяния увеличиваются. Поэтому в расчетах задаются предполагаемой кратностью увеличение тока, обусловленной уменьшением индуктивного сопротивления из-за насыщения зубцовой зоны. Ориентировочно для расчета пусковых режимов, принимают Кнас=1,1-1,4. Средняя МДС обмотки, отнесенная к одному пазу обмотки статора: ;
 , А , А |
uпр | а |  |
kоб1 | Z1 | Z2 | Fп.ср, А | |
| Пример | 33.093 | 34 | 1 | 1 | 0.95 | 36 | 26 | 2.188·10 3 |
| Расчет | ||||||||
| Расчет |

где uп — число эффективных проводников в пазу (п.2.2.6.), а — число параллельных ветвей. Коэффициент для определения фиктивной индукции потока рассеяния в воздушном зазоре: ;
| СN | δ, м | t1, м | t2, м | |
| Пример | 0.858 | 0,0002 | 0,011 | 0,015 |
| Расчет | ||||
| Расчет |

где — воздушный зазор; t1 и t2 — зубцовые деления статора и ротора. Фиктивная индукция потока рассеяния в воздушном зазоре: ;
| СN | δ, м | Fп.ср, А | Вфδ, Тл | |
| Пример | 0.858 | 0,0002 | 2.188·10 3 | 7.966 |
| Расчет | ||||
| Расчет |

Коэффициент магнитной проводимости пазового рассеяния обмотки статора с учетом насыщения. По полученному значению B и по таблице 46 находим отношение потока рассеяния при насыщении к потоку рассеяния не насыщенной машины, характеризуемой коэффициентом хδ: ;
| с1 | t1, м | bш1, м | хδ | |
| Пример | 5.139·10 -3 | 0,011 | 0,0033 | 0.33 |
| Расчет | ||||
| Расчет |

Вызванное насыщение от полей рассеяния уменьшение коэффициента проводимости рассеяния полузакрытого паза статора: ; где hш1 — размер паза в штампе; h1 — размер паза в свету с учетом припуска на сборку.
| с1 | h1, м | bш1, м |  |
hш1, м | |
| Пример | 5.139·10 -3 | 0,0016 | 0,0033 | 0.298 | 0,001 |
| Расчет | |||||
| Расчет |

Коэффициент магнитной проводимости пазового рассеяния обмотки статора с учетом насыщения: ;
| λп1нас | λп1 | Δλп1нас | |
| Пример | 0.206 | 0.504 | 0.298 |
| Расчет | |||
| Расчет |

где п1 — проводимость, рассчитанная без учета насыщения (п.2.6.17.). Коэффициент магнитной проводимости дифференциального рассеяния обмотки статора с учетом влияния насыщения: ;
| λд1нас | λд1 | хδ | |
| Пример | 1.096 | 3.32 | 0.33 |
| Расчет | |||
| Расчет |

где д1 — коэффициент магнитной проводимости дифференциального рассеяния обмотки статора без учета влияния насыщения. Индуктивное сопротивление обмотки статора с учетом влияния насыщения:
| х1нас | х1 | λп1нас | λд1нас | λп1 | λд1 | λл1 | |
| Пример | 1.206 | 2.446 | 0.206 | 1.096 | 0.504 | 3.32 | 1.154 |
| Расчет | |||||||
| Расчет |

где л1 — коэффициент магнитной проводимости лобового рассеяния обмотки статора без учета влияния насыщения, x1 — индуктивное сопротивление фазы обмотки статора. Коэффициент магнитной проводимости пазового рассеяния обмотки ротора с учетом насыщения: ;
| с2 | t2, м | bш2, м | Хδ | |
| Пример | 9.503·10 -3 | 0,015 | 0,001 | 0.33 |
| Расчет | ||||
| Расчет |

Уменьшение коэффициента проводимости рассеяния паза ротора:
| с2 | hш2, м | bш2, м |  |
|
| Пример | 9.503·10 -3 | 0,0005 | 0,001 | 0.452 |
| Расчет | ||||
| Расчет |
Коэффициент магнитной проводимости пазового рассеяния обмотки ротора с учетом насыщения: ;
| λп2ξнас | λп2ξ | Δλп2ξнас | |
| Пример | 0.265 | 0.188 | 0.452 |
| Расчет | |||
| Расчет |

Коэффициент магнитной проводимости дифференциального рассеяния обмотки ротора с учетом влияния насыщения: ;
| λд2нас | λд2 | хδ | |
| Пример | 1.476 | 4.473 | 0.33 |
| Расчет | |||
| Расчет |

Приведенное индуктивное сопротивление фазы обмотки ротора с учетом насыщения и вытеснения тока: ;
| х ‘ 2нас | х ‘ 2 | λп2ξнас | λд2нас | λп2 | λд2 | λл2 | |
| Пример | 1.339 | 4.098 | 0.265 | 1.476 | 1.762 | 4.473 | 0.44 |
| Расчет | |||||||
| Расчет |

Сопротивление взаимной индукции обмоток статора и ротора в пусковом режиме: ;
| х12п, Ом | х12, Ом | Fц, А | Fδ, А | |
| Пример | 148.633 | 81.123 | 688.755 | 375.918 |
| Расчет | ||||
| Расчет |

где x12 — сопротивление взаимной индукции обмоток статора и ротора (п.2.8.1.); Fц — суммарное магнитное напряжение магнитной цепи машины (на пару полюсов) (п.2.5.16.); F — магнитное напряжение воздушного зазора (п.2.5.7.). Коэффициент с1пнас. ;
| с1пнас | х1нас | х12п | |
| Пример | 1.008 | 1.206 | 148.633 |
| Расчет | |||
| Расчет |

Активная составляющая сопротивления правой ветви Г-образной схемы замещения (см. рис.23 ). ;
| с1пнас | r1, Oм | r ‘ 2ξ | s | aп | |
| Пример | 1.008 | 1.776 | 1.841 | 1 | 3.632 |
| Расчет | |||||
| Расчет |

Реактивная составляющая сопротивления правой ветви Г — образной схемы замещения. ;
| с1пнас | x1нас, Oм | x ‘ 2ξнас | bп | |
| Пример | 1.008 | 1.206 | 1.339 | 2.556 |
| Расчет | ||||
| Расчет |

Ток в обмотке ротора. ;
| I ‘ 2п | U1нф, Oм | ап | bп | |
| Пример | 49.533 | 220 | 3.632 | 2.556 |
| Расчет | ||||
| Расчет |

Ток в обмотке ротора с учетом коэффициента с1пнас. ;
| I1п, А | I ´ 2п, A | x12п | с1пнас | ап | bп | |
| Пример | 49.994 | 49.533 | 148.633 | 1.008 | 3.632 | 2.556 |
| Расчет | ||||||
| Расчет |

Ток в обмотке ротора в относительных единицах. ;
| I1п* | I1п, А | I1н, А | |
| Пример | 5.786 | 49.994 | 8.641 |
| Расчет | |||
| Расчет |

где I1н – номинальный ток обмотки статора. Относительное значение момента Мп*. ;
| Мп* | I ´ 2п, А | I ´ 2н, А | KR | sн | s | |
| Пример | 0.89 | 49.533 | 8.64 | 1.084 | 0,025 | 1 |
| Расчет | ||||||
| Расчет |
Для определения тока  повторим расчет пунктов 1.9.2.-1.9.32. для s=sн=0,025.
повторим расчет пунктов 1.9.2.-1.9.32. для s=sн=0,025.  ;
;
| ξ | hc, м | sн | |
| Пример | 0.212 | 0.021 | 0,025 |
| Расчет | |||
| Расчет |
 ; где
; где  находим по рис.25
находим по рис.25  находим по рис.26
находим по рис.26
| hr, м | hc, м | φ | φ´ | |
| Пример | 0.021 | 0.021 | 0.0018 | 0,99 |
| Расчет | ||||
| Расчет |

;
| qr, м | b1p, м | br, м | hr, м | |
| Пример | 9.707·10 — 5 | 6.641·10 -3 | 2.356·10 -3 | 0.021 |
| Расчет | ||||
| Расчет |

;
| br, м | b1p, м | b2p, м | h1p, м | hr, м | |
| Пример | 2.356·10 -3 | 6.641·10 -3 | 2.669·10 -3 | 0.016 | 0,00235 |
| Расчет | |||||
| Расчет |

;
| qr, м | qс, м | kr | |
| Пример | 9.707·10 — 5 | 9.661·10 — 5 | 0.995 |
| Расчет | |||
| Расчет |

;
| KR | rc, Ом | r2, Ом | kr | |
| Пример | 0.997 | 6.629·10 -5 | 9.794·10 -5 | 0.995 |
| Расчет | ||||
| Расчет |

| r´2ξ | KR | r´2 | |
| Пример | 1.692 | 0.997 | 1.698 |
| Расчет | |||
| Расчет |

;
| λп2ξ | h1, м | b1р, м | qc, м | bш2, м | hш2, м | kД | |
| Пример | 1.574 | 0.016 | 6.6·10 -3 | 9.661·10 -3 | 1·10 -3 | 0,5·10 -3 | 0.66 |
| Расчет | |||||||
| Расчет |

;
| λп2ξ | λл2 | λд2 | λп2 | Кх | |
| Пример | 0.188 | 0.44 | 4.473 | 1.762 | 0.764 |
| Расчет | |||||
| Расчет |

;
| х´2ξ | Kх | х´2 | |
| Пример | 3.132 | 0.764 | 4.098 |
| Расчет | |||
| Расчет |

;
| I´2, A | U1нф, В | r1, Oм | r´2ξ, Oм | sн | x 1нас, Oм | x´ 2ξнас, Oм | |
| Пример | 3.157 | 220 | 1.776 | 1.692 | 0,025 | 1.206 | 1.339 |
| Расчет | |||||||
| Расчет |

Критическое скольжение ;
| sкр | r ´ 2 | х1нас | с1нас | х´2ξнас | |
| Пример | 0.67 | 1.698 | 1.206 | 1.008 | 1.339 |
| Расчет | |||||
| Расчет |
Построение рабочих и механической характеристик производится по расчетным данным пп. 1.1.1. – 1.9.32. с использованием программы описанной в главе 2.