О приводе постоянного тока
Двигатель постоянного тока (ДПТ) является электрической машиной, преобразующей электрическую энергию в механическую для осуществления технологических процессов в различных областях человеческой деятельности. Основными применениями в промышленности для ДПТ являются процессы, в которых необходимо поддерживать и регулировать скорость вращения вала двигателя независимо от величины нагрузки, например, в металлургии, станкостроении.
В соответствии с принципом действия, двигатели постоянного тока имеют три основных функциональных элемента: магнитную систему с постоянным или регулируемым магнитным полем, обмотку, в которой происходит преобразование энергии и расположенную на вращающейся части двигателя (якоре), и щеточно-коллекторный узел, преобразующий знакопостоянное напряжение на внешних зажимах в переменную ЭДС обмотки якоря.
Магнитная система двигателей постоянного тока включает в себя станину, главные полюса и якорь. Магнитная система может быть с постоянными магнитами и с электромагнитами. Массовое применение в промышленности нашли ДПТ с электромагнитами. Ниже речь идет о таких двигателях.
Станина имеет вид полого цилиндра и выполняется из чугуна или стали.
Главные полюса имеют вид буквы «Т» с вогнутой северху горизонтальной частью, повторяющей форму цилиндрического ротора. Причем эта часть называется полюсным наконечником, а вертикальная ножка – сердечником. На сердечнике наматывается обмотка возбуждения. Главные полюса выполняются шихтованными и набираются из листовой электротехнической стали толщиной в доли миллиметра. Они расположены внутри станины и прикреплены к ней с помощью болтов. Для повышения энергоэффективности и улучшения КПД станина и полюса могут выполняться шихтованными и представлять собой набор фасонных пластин.
Якорь имеет вид цилиндра и выполняется шихтованным. Пакет стали якоря напрессовывается на вал. По наружной цилиндрической поверхности якоря выполняются пазы, в которые укладываются проводники обмотки якоря.
Коллектор имеет вид цилиндра, набранного из медных пластин трапецеидального сечения. К пластинам припаиваются или привариваются концы секций обмотки якоря. Щетки представляют собой прямоугольные параллелепипеды и выполняются из проводящих материалов на основе графита. Щетки закреплены на станине и соединены электрически с выводами, расположенными в коробке на корпусе двигателя.
Двигатели постоянного тока бывают с независимым, последовательным, параллельным и смешанным возбуждением. Примером ДПТ с независимым возбуждением являются двигатели серий MM и MAG производства MAGNETIC.
Способы регулирования скорости ДПТ с независимым возбуждением
На рис. 1… 3 представлены электромеханические характеристики двигателя постоянного тока с независимым возбуждением – зависимость скорости вращения от тока якоря. Распространенной задачей при выполнении технологических операций является регулирование скорости ДПТ. Скорость двигателя постоянного тока с независимым возбуждением может регулироваться следующими тремя способами:
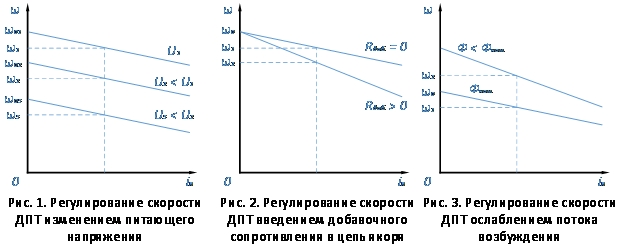
1. Изменение питающего напряжения позволяет изменить скорость идеального холостого хода, не меняя наклона электромеханической характеристики. При этом способе электромеханическая характеристика смещается параллельно самой себе, обеспечивая наибольший диапазон регулирования и наилучшие энергетические характеристики. Для изменения напряжения якоря нужен источник регулируемого напряжения.
2. Изменение сопротивления якорной цепи добавлением последовательно включенного реостата изменяет наклон характеристики при сохранении скорости идеального холостого хода. Данный способ вытесняется первым в связи со ступенчатостью регулирования и низкими энергетическими характеристиками из-за рассеивания энергии в сопротивлении реостата.
3. Увеличение магнитного потока вызывает насыщение магнитной системы, поэтому не применяется. Ослабление магнитного потока вызывает увеличение скорости идеального холостого хода и может быть использовано для работы на низких моментах нагрузки. Преимуществом регулирования тока возбуждения является то, что величина этого тока на двигателях средней и большой мощности в десятки раз меньше тока якоря, что позволяет использовать для регулирования скорости приводы меньшей мощности. Однако, диапазон регулирования скорости при этом способе меньше, чем при первом. Ослабление магнитного потока используют для расширения диапазона регулирования скорости совместно с изменением питающего напряжения.
Устройства для регулирования скорости ДПТ
Для регулирования скорости ДПТ разработаны различные электронные устройства, выполняющие не только основную задачу, но и обеспечивающие дополнительный функционал: защиты двигателя, автоматическую настройку под конкретный двигатель, измерение параметров, контроль режимов, выдачу предупредительной и аварийной сигнализации, управление вспомогательными устройствами. Хорошо освоенными являются тиристорные приводы с аналоговой или цифровой управляющей частью. Примерами первых являются приводы SLE, вторых – PL (двухквадрантный) и PLX (четырехквадрантный) производства Sprint-Electric.
Применение аналоговой управляющей части обеспечивает экономически эффективное решение для простых применений, где не требуется реверса двигателя приводного механизма. В этом случае импульсы управления формируются на основании сигналов задания и обратной связи, проходящих только через аналоговый тракт привода. Похожим образом обрабатываются сигналы для различных защит двигателя. Быстродействие привода обусловливается постоянными времени внутренних фильтров сигнала, а отсутствие встроенной программы позволяет использовать его в приложениях с повышенными требованиями к надежности.
Цифровая управляющая часть добавляет функционал, но и цена привода увеличивается. В этом случае обработку внешних сигналов в цифровой форме выполняет встроенный контроллер с интегрированным программным обеспечением, которое может быть более гибко сконфигурировано под конкретную задачу. Зачастую производители совершенствуют программное обеспечение своих изделий, выпуская так называемые «прошивки», расширяющие функционал готовых устройств. В аналоговых приводах расширить функционал готового устройства можно только изменением внешнего по отношению к приводу оборудования.
Типы датчиков обратной связи по скорости
Для регулирования скорости служат так называемые датчики обратной связи. Сигнал с них при необходимости заводится в привод, представляя реальную скорость механизма. Это позволяет системе управления внести коррекцию в работу привода в случае отклонения желаемой скорости от заданной. Датчики скорости бывают аналоговыми, цифровыми и аналого-цифровыми или комбинированными.
Аналоговые датчики скорости – это тахогенераторы и резольверы. Тахогенератор представляет собой электрическую машину постоянного тока, ЭДС которой в рабочем диапазоне параметров пропорциональна скорости вращения вала. Внешнее питание тахогенератору не требуется. Резольвер является вращающимся трансформатором, амплитуда выходного напряжения которого зависит от входного напряжения и угла поворота ротора.
Цифровые датчики положения (энкодеры), используемые в качестве датчиков скорости, могут быть абсолютными и относительными. Абсолютные энкодеры и при пропадании и последующем восстановлении питания позволяют узнать текущее положение ротора. Относительные (инкрементальные) энкодеры позволяют определить только относительное положение при вращении ротора, выходным сигналом относительного энкодера являются два сдвинутых на четверть периода импульса и импульс нулевого положения. Сдвиг на четверть периода позволяет определить направление вращения, а импульс нулевого положения используется, например, для подсчета числа оборотов.
Абсолютные энкодеры бывают с выходным протоколом, который позволяет, кроме получения информации о положении ротора, изменять характеристики энкодера, проводить его диагностику и калибровку. Различными производителями поддерживается часть или все из представленных протоколов: SSI, BiSS interface, ISI, Profibus, Profinet, Ethernet Powerlink, EtherNet TCP/IP, Modbus, DeviceNet, CANopen, EtherCAT, Endat and Hiperface. Наиболее распространены SSI и Endat.
Комбинированные энкодеры помимо сигналов протокола выдают также импульсы относительного положения или сигналы фаз для работы сервосистем.
Построение системы управления двигателем постоянного тока на базе PL\PLX
Рассмотрим пример построения системы управления ДПТ на примере привода постоянного тока PL\PLX. На рис. 4 представлена схема подключения.
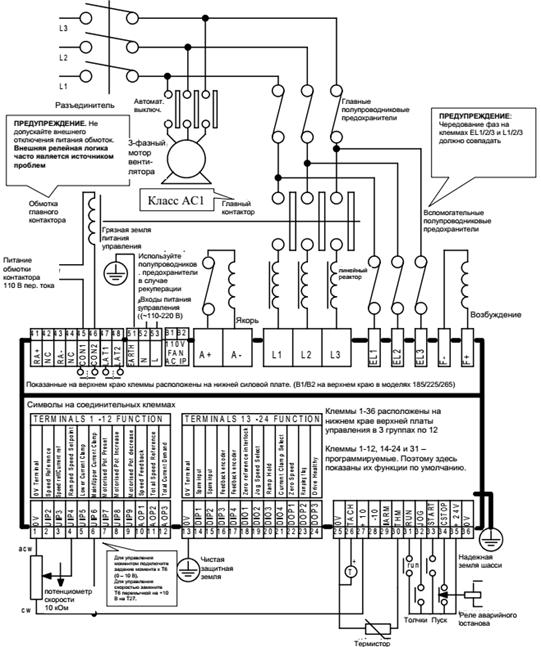
Рис. 4. Пример построения системы управления ДПТ на примере привода постоянного тока PL\PLX
Основными компонентами системы управления ДПТ являются:
1.Привод постоянного тока, который обеспечивает регулирование тока якоря, скорости двигателя, защиты двигателя, управление внешними цепями и обеспечение возбуждения. Существет набор программных функциональных блоков, позволяющих гибко настроить привод под конкретные применения. Привод может быть оснащен модулями поддержки распространенных сетевых протоколов и поддерживает различные типы сигналов обратной связи. При пусконаладке и диагностике устройств на базе PL\PLX удобно использовать встроенную систему диагностики и осциллограф.
2.Главный контактор, назначение которого — физическое отсоединение якоря двигателя от источника питания. К контактору и его цепям управления предъявляются следующие требования: должна быть возможность отключения контактора без использования электроники, контактор не должен размыкать ток и цепь управления контактора должна соответствовать всем требованиям конкретной электроустановки. Блоки PL и PLX спроектированы для выполнения всех этих правил управления главным контактором. Обмотка реле подключена непосредственно к клемме CSTOP (останов по выбегу) T34 и зашунтирована конденсатором, в результате время отключения составляет около 100 миллисекунд. За счет этого у PL\PLX есть время снизить ток якоря до нуля перед размыканием контактов. Убедитесь, что обмотка контактора оснащена гасящим устройством.
3.Главные полупроводниковые предохранители. Они служат для защиты сети от пробоя тиристоров и для защиты привода от замыкания на стороне выпрямленного напряжения. Предохранители в цепи якоря нужны для защиты привода, у которого есть возможность рекуперации энергии в сеть – PLX. Необходимо учитывать рекомендации по приводам для правильного выбора предохранителей по величине I²T.
4.Линейный реактор, который сглаживает ток и уменьшает гармонические искажения напряжения питающей сети. Кроме того, индуктивность реактора позволяет компенсировать низкую индуктивность обмотки якоря и улучшить таким образом коммутацию тиристоров. Еще одной немаловажной функцией реактора является ограничение тока при коротких замыканиях на стороне якоря.
Распространенные вопросы при проектировании систем с приводами постоянного тока
1.Можно ли размыкать цепь питания катушки управления главного контактора кнопкой аварийного останова?
— Нет. Важно, чтобы привод сам контролировал главный контактор и не было другого внешнего воздействия на эту цепь. Аварийный останов должен быть подключен к клемме 34, останов выбегом (coast stop). Однако, если местные указания безопасности требуют необходимости разрыва цепи питания катушки главного контактора кнопкой аварийного останова, необходимо по крайней мере подать сигнал с блок-контакта контактора на клемму 31, пуск (run), чтобы привод имел возможность снизить ток перед отключением питания силового моста.
2.Необходимо ли использовать полупроводниковые предохранители?
— Безусловно, да. Это единственный способ защитить мост привода в случае сбоя в любом месте системы, и это гарантийное условие для привода. На рынке существуют определенные типы выключателей, которые, как утверждается, достаточно быстры для защиты полупроводников, но нам еще предстоит найти тот, который обеспечивает такую же защиту, как и корректно подобранный предохранитель. Стоит отметить, что максимальный номинальный ток предохранителя имеет второстепенное значение, в то время как он довольно велик, — предел тока привода и алгоритм блокировки достаточно сложны, чтобы защитить от повреждения при длительной перегрузке. Важной характеристикой предохранителей является величина I²T. Выраженный в A²с (амперы в квадрате, помноженные на секунды), это мера пропускания энергии, и максимально допустимое значение для любого привода приведено в таблице номиналов предохранителей в руководстве на привод. По сути, если величина I²T не указана в спецификации производителя плавких предохранителей, они вряд ли будут достаточными, даже если в описании производителя используется альтернативное имя, такое как «сверхбыстрый». Предохранитель по стороне переменного тока является обязательным во всех случаях, в то время как предохранители по стороне постоянного тока необходимо устанавливать только в системах, где возможна рекуперация энергии в сеть. Что касается предохранителей в цепи постоянного тока, следует соблюдать особую осторожность, т.к. применение для этих цепей предохранителей переменного тока даже с правильным значением I²T недопустимо.
3.Как сделать ослабление поля?
— Этот вопрос обычно сопровождается утверждением о том, что он оказался трудным и / или занимающим много времени на старых приводах. С цифровым приводом это сделать просто. Если вы правильно установили параметры BASE SPEED и TOP SPEED в CHANGE PARAMETERS, CALIBRATION и помните, что вы должны использовать либо тахогенератор, либо обратную связь с энкодером (ослабление поля не может работать только с обратной связью напряжения якоря), все, что вам нужно сделать, это перейти к CHANGE PARAMETERS, FIELD CONTROL, FIELD WEAKENING MENU, FIELD WEAKENING ENABLE и установить его в ENABLED. Этого будет достаточно в большинстве случаев. Для некоторых двигателей требуется профилирование тока якоря, чтобы улучшить коммутацию в области слабого поля, эту информацию следует запрашивать у производителей двигателей. Относящиеся к этому случаю параметры находятся в CHANGE PARAMETERS, CURRENT CONTROL, I DYNAMIC PROFILE.
Ведущий технический специалист ООО «Драйвика» Образцов П.С.
Регулирование частоты вращения асинхронного двигателя изменением скольжения
Регулирование частоты вращения асинхронного двигателя изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения в соответствии с формулами (32), (34) изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании. Регулирование скольжения можно осуществлять как со стороны статора, так и со стороны ротора. Естественно, что во втором случае ротор должен быть фазным и иметь выведенную на контактные кольца обмотку.
При регулировании со стороны статора изменяют приложенное к его обмотке напряжение. Увеличение напряжения сверх номинального приводит к насыщению магнитной цепи двигателя и потому не применяется. Для регулирования частоты вращения асинхронного двигателя уменьшают напряжение питания. При этом развиваемый двигателем момент изменяется пропорционально квадрату напряжения и соответственно изменяются механические характеристики двигателя (рис. 28,а), в результате чего изменяются и значения рабочих скольжений. Очевидно, что регулирование возможно в диапазоне изменения скольжения от 0 до sкр. Для получения достаточно большого диапазона изменения частоты вращения необходимо увеличивать sкр, т. е. применять двигатели с повышенным скольжением типа 4АС (рис. 28,б).
Рис. 28. Механические характеристики асинхронных двигателей при различных значениях первичного напряжения: а — двигатель нормального исполнения; б — двигатель с повышенным скольжением
Этот метод регулирования частоты вращения асинхронного двигателя применяется также для двигателей с фазным ротором, причем в этом случае в цепь ротора включаются добавочные сопротивления для увеличения sкр.
В связи с пониженным КПД и трудностями регулирования напряжения рассматриваемый метод применяется только для двигателей относительно малой мощности. При этом для регулирования U1 можно использовать регулируемые автотрансформаторы или резисторы, включенные последовательно в первичную цепь, а также реакторы насыщения, регулируемые путем подмагничивания постоянным током (магнитные усилители). При изменении постоянного тока подмагничивания индуктивное сопротивление реактора изменяется, что приводит к изменению напряжения на зажимах двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования частоты вращения в область s>sкр и получить при этом, жесткие механические характеристики.
Кроме магнитных усилителей применяются также управляемые и полууправляемые полупроводниковые регуляторы напряжения, также позволяющие в широком диапазоне регулировать приложенное напряжение и осуществлять автоматическое регулирование частоты вращения двигателя .
Частным случаем рассмотренного способа является импульсное регулирование частоты вращения, при котором асинхронный двигатель периодически подключается к сети и отключается от нее. При этом двигатель постоянно находится в переходном режиме ускорения (подключен к сети) или торможения (отключен от сети). Подбирая соотношение времени включения ко времени отсутствия питания, можно регулировать среднюю частоту вращения двигателя в широком диапазоне.
При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). При этом важно заметить, что изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента Мmах (см. рис. 22). Таким образом, перегрузочная способность двигателя при регулировании не снижается.
Если асинхронный двигатель работает с некоторым приводимым механизмом на валу со статическим моментом сопротивления Мс (см. рис. 22), то на естественной характеристике установившемуся режиму его работы будет соответствовать точка 1. При введении добавочных сопротивлений — резисторов Rд1 — Rд3 — в цепь ротора произойдет соответствующий переход двигателя в новые режимы работы с меньшими частотами вращения: n1>n2>n3>n4. Характеристики двигателя по мере увеличения сопротивления резисторов в цепи ротора Rд становятся более мягкими. Наиболее жесткой характеристикой в данном случае будет естественная характеристика.
Работа двигателя на естественной характеристике в данном случае будет наиболее стабильной и устойчивой. Это означает, что при изменении момента сопротивления Мс в процессе работы производственного механизма отклонения частоты вращения двигателя будут минимальными.
Технические показатели данного способа регулирования следующие:
- диапазон регулирования сравнительно небольшой — порядка 2 : 1 и ограничивается вероятностью нестабильности работы двигателя при больших значениях сопротивлений резисторов Rд;
- плавность регулирования при реостатном регулировании небольшая и определяется числом ступеней регулирования. Переключение ступеней осуществляется, как правило, с помощью магнитных контроллеров, контакторов и реле.
Кроме реостатного регулирования применяется регулирование частоты вращения путем введения добавочной ЭДС в обмотку ротора асинхронного двигателя.
Регулирование частоты вращения асинхронного двигателя путем увеличения его скольжения всегда связано с выделением во вторичной цепи двигателя значительной электрической мощности скольжения Ps= sPэм, большая часть которой при реостатном регулировании теряется в реостате. Поэтому, естественно, возникает мысль о полезном использовании этой мощности и о повышении таким образом КПД установки.
Полезное использование мощности скольжения возможно, если вместо реостата присоединить к контактным кольцам ротора двигателя приемник электрической энергии в виде вспомогательной электрической машины. Эта машина должна работать в режиме двигателя, обеспечивая требуемое напряжение на своих зажимах (и соответственно на контактных кольцах самого асинхронного двигателя).
Поясним, как влияет на работу асинхронного двигателя введение добавочной ЭДС Eд в обмотку ротора, при условии, что частота Eд всегда равна частоте токов ротора f2 = sf1.
Пусть в отсутствие ЭДС Eд по цепи ротора протекает ток I2, определяемый в соответствии с формулой (25) как I2=sE2/(r2+jsx2). Этот ток, взаимодействуя с полем обмотки статора, создает электромагнитный момент М, численно равный моменту сопротивления нагрузки Мс, так что двигатель работает при некоторой частоте вращения n.
Если теперь во вторичную цепь ввести ЭДС Eд встречно ЭДС скольжения E2s в этой же цепи, то вторичный ток
в первый момент времени уменьшится. Поэтому развиваемый двигателем момент М также уменьшится, двигатель начнет тормозиться, а скольжение s увеличиваться. При этом согласно равенству (56) ток I2, а вместе с ним и момент М будут увеличиваться. Это будет происходить до тех пор, пока опять не наступит равновесие моментов на валу: М=Мс. Двигатель при этом будет работать с увеличенным скольжением s. Очевидно, что регулированием Eд можно регулировать s и, следовательно, частоту вращения двигателя.
Предположим теперь, что ЭДС Ед имеет по сравнению с рассмотренным случаем противоположное направление и совпадает по фазе с ЭДС sE2. Тогда вместо (56) получаем
В первый момент после введения ЭДС Eд ток I2 и момент М возрастут, асинхронный двигатель будет ускоряться и s будет уменьшаться. При достаточной величине Ед величина s уменьшится до нуля, и если ток I2, создаваемый в этом случае только за счет действия Eд, все еще будет велик по сравнению с током, необходимым для создания момента М=Mс, то ускорение двигателя будет продолжаться и скорость превысит синхронную. Скольжение s и ЭДС E2s при этом изменят знаки и будут расти по абсолютной величине до тех пор, пока в соответствии с выражением (57) ток не упадет до необходимой величины. При sрис. 18). Ток I2 при этом будет иметь составляющую, совпадающую с потоком Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos φ двигателя повысится.
Таким образом, с помощью добавочной ЭДС Eд путем изменения ее значения и направления можно осуществить плавное двухзонное регулирование частоты вращения двигателя ниже и выше синхронной.
Реализация этого весьма экономичного способа регулирования частоты вращения сопряжена с усложнением схемы регулирования и требует применения электромеханического (электромашинного) или вентильного каскада для преобразования выделяемой при регулировании мощности потерь скольжения в полезную электрическую или механическую мощность. Каскадные установки выполняются на мощности до тысяч киловатт с диапазоном регулирования частоты вращения порядка 3 : 1.
Пуск электродвигателя постоянного тока
При подаче напряжения на электродвигатель происходит скачок напряжения, который называется пусковым током. Пусковой ток часто выше номинального от 5 до 10 раз, но отличается своей кратковременностью.
Процессы, протекающие при пуске двигателя
Когда на обмотке статора увеличивается токовая нагрузка, одновременно с этим увеличивается крутящий момент двигателя, передающийся на вал ротора. Резкое увеличение крутящего момента может вызвать резкое повышение температуры обмотки статора и привести к неисправностям в изоляции, что может стать причиной вибраций, механических деформаций и выхода двигателя из строя.
Чтобы избежать поломки электродвигателя, сразу после начала его работы пусковой ток понижается до номинальных частот вращения. Для снижения пускового тока применяют несколько способов, которые также позволяют стабилизировать напряжение электропитания. Существует несколько способов запуска двигателей постоянного тока.
Прямой пуск электродвигателя постоянного тока
При прямом пуске подключение обмотки якоря происходит непосредственно к электрической сети. Это означает, что двигатель подключается к источнику электропитания при своем номинальном напряжении. Прямой пуск электродвигателя используется, когда есть стабильное питание двигателя, который жестко связан с приводом. Это один из самых простых методов пуска.
Преимуществом прямого пуска является то, что при таком запуске температура повышается не столь значительно, если сравнивать с другими методиками. Если отсутствуют специальные ограничения на поступающий от электросети ток, то такой способ считается наиболее предпочтительным. Те электродвигатели, что предназначаются для частых пусков и отключений, оборудуются специальной системой управления, с контактором и термореле, которые защищают прибор от поломки.
Если электродвигатели имеют малую мощность и работают без частых остановок и пусков, то для его включения требуется самое примитивное оборудование. Обычно им является вручную работающий расцепитель. При такой схеме непосредственно на сами клеммы двигателя и подается напряжение. Для электродвигателей небольших размеров пусковой момент составляет 150–300 % от номинального, а сам пусковой ток — 300–800%.
Прямой пуск имеет то ограничение, что пик нагрузки некоторых крупных двигателей может быть в 15, а иногда и в 50 раз больше номинального. Такие нагрузки совершенно недопустимы, поэтому такой способ пуска применяется лишь на двигателях малой мощности.
Реостатный пуск электродвигателя постоянного тока
Реостатный пуск, в отличие от прямого, не имеет ограничений на мощность двигателя, поэтому его часто применяют на приборах большой мощности. Реостат для пуска изготавливается из провода, который имеет высокое удельное сопротивление и разделен на секции. Ток возбуждения, который возникает при включении двигателя, устанавливается таким образом, чтобы соответствовать номинальным значениям. Это необходимо для того, чтобы при пуске развивался максимально большой допустимый момент, что необходимо для быстрого разгона двигателя.
Реостатный пуск осуществляется вместе с последовательным уменьшением сопротивления реостата, что позволяет не допускать скачков электрического тока и гарантирует безопасность при включении даже самых мощных электродвигателей.
Пуск электродвигателя путем изменения питающего напряжения
Пуск путем изменения питающего напряжения является еще одним способом начать работу электродвигателя. При использовании реостатного пуска могут возникнуть большие потери энергии непосредственно в самом пусковом реостате. Для того чтобы избежать этих потерь и повысить экономичность и энергоэффективность, двигатель запускается с помощью очень плавного постепенного повышения напряжения, которое подается на обмотку якоря. Для такого способа требуется отдельный источник постоянного тока, с помощью которого можно регулировать напряжение. Для этого используют генераторы и управляемые выпрямители. Пуск путем изменения питающего напряжения двигателя является обычной практикой на тепловозах.
Для оформления заказа позвоните менеджерам компании Кабель.РФ ® по телефону +7 (495) 646-08-58 или пришлите заявку на электронную почту zakaz@cable.ru с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.
Электродвигатели постоянного тока
Электродвигатели постоянного тока применяют в тех электроприводах, где требуется большой диапазон регулирования скорости, большая точность поддержания скорости вращения привода, регулирования скорости вверх от номинальной.
Как устроены электродвигатели постоянного тока
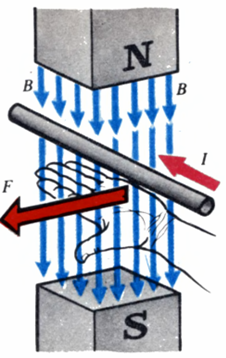
Работа электрического двигателя постоянного тока основана на явлении электромагнитной индукции. Из основ электротехники известно, что на проводник с током, помещенный в магнитное поле, действует сила, определяемая по правилу левой руки :
где I — ток, протекающий по проводнику, В — индукция магнитного поля; L — длина проводника.
При пересечении проводником магнитных силовых линий машины в нем наводится электродвижущая сила, которая по отношению к току в проводнике направлена против него, поэтому он а называется обратной или противодействующей (противо-э. д. с). Электрическая мощность в двигателе преобразуется в механическую и частично тратится на нагревание проводника.
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря , разделенных воздушным зазором.
Индуктор электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах — специальная обмотка, служащая для улучшения условий коммутации.
Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов , рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянного тока .
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях , которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусом электродвигателя .
Коммутация в электродвигателях постоянного тока
В процессе работы электродвигателя постоянного тока щетки, скользя по поверхности вращающегося коллектора, последовательно переходят с одной коллекторной пластины на другую. При этом происходит переключение параллельных секций обмотки якоря и изменение тока в них. Изменение тока происходит в то время, когда виток обмотки замкнут щеткой накоротко. Этот процесс переключения и явления, связанные с ним, называются коммутацией .
В момент коммутации в короткозамкнутой секции обмотки под влиянием собственного магнитного поля наводится э. д. с. самоиндукции. Результирующая э. д. с. вызывает в короткозамкнутой секции дополнительный ток, который создает неравномерное распределение плотности тока на контактной поверхности щеток. Это обстоятельство считается основной причиной искрения коллектора под щеткой. Качество коммутации оценивается по степени искрения под сбегающим краем щетки и определяется по шкале степеней искрения.

Способы возбуждения электродвигателей постоянного тока
Под возбуждением электрических машин понимают создание в них магнитного поля, необходимого для работы электродвигателя . Схемы возбуждения электродвигателей постоянного тока показаны на рисунке .
Схемы возбуждения электродвигателей постоянного тока: а — независимое, б — параллельное, в — последовательное, г — смешанное
По способу возбуждения электрические двигатели постоянного тока делят на четыре группы :
1. С независимым возбуждением, у которых обмотка возбуждения НОВ питается от постороннего источника постоянного тока.
2. С параллельным возбуждением (шунтовые), у которых обмотка возбуждения ШОВ включается параллельно источнику питания обмотки якоря.
3. С последовательным возбуждением (сериесные), у которых обмотка возбуждения СОВ включена последовательно с якорной обмоткой.
4. Двигатели со смешаным возбуждением (компаундные), у которых имеется последовательная СОВ и параллельная ШОВ обмотки возбуждения.
Типы двигателей постоянного тока
Двигатели постоянного тока прежде всего различаются по характеру возбуждения. Двигатели могут быть независимого, последовательного и смешанного возбуждения. Параллельное возбуждение можно не рассматривать. Даже если обмотка возбуждения подключается к той же сети, от которой питается цепь якоря, то и в этом случае ток возбуждения не зависит от тока якоря, так как питающую сеть можно рассматривать как сеть бесконечной мощности, а ее напряжение постоянным.
Обмотку возбуждения всегда подключают непосредственно к сети, и поэтому введение добавочного сопротивления в цепь якоря не оказывает влияния на режим возбуждения. Той специфики, которая существует при параллельном возбуждении в генераторах, здесь быть не может.
В двигателях постоянного тока малой мощности часто используют магнитоэлектрическое возбуждение от постоянных магнитов. При этом существенно упрощается схема включения двигателя, уменьшается расход меди. Следует однако иметь в виду, что, хотя обмотка возбуждения исключается, габариты и масса магнитной системы не ниже, чем при электромагнитном возбуждении машины.
Свойства двигателей в значительной мере определяются их системой возбуждения.
Чем больше габариты двигателя, тем, естественно, больше развиваемый им момент и соответственно мощность. Поэтому при большей скорости вращения и тех же габаритах можно получить большую мощность двигателя. В связи с этим, как правило, двигатели постоянного тока, особенно малой мощности, проектируются на большую частоту вращения — 1000-6000 об/мин.
Следует, однако, иметь в виду, что скорость вращения рабочих органов производственных машин существенно ниже. Поэтому между двигателем и рабочей машиной приходится устанавливать редуктор. Чем больше скорость двигателя, тем более сложным и дорогим получается редуктор. В установках большой мощности, где редуктор представляет собой дорогостоящий узел, двигатели проектируются на существенно меньшие скорости.
Следует еще иметь в виду, что механический редуктор всегда вносит значительную погрешность. Поэтому в прецизионных установках желательно использовать тихоходные двигатели, которые можно было бы сочленить с рабочими органами либо напрямую, либо посредством простейшей передачи. В связи с этим появились так называемые высокомоментные двигатели на низкие скорости вращения. Эти двигатели нашли широкое применение в металлорежущих станках, где сочленяются с органами перемещения без каких-либо промежуточных звеньев посредством шарико-винтовых передач.
Электрические двигатели отличаются также по конструктивным при знакам, связанным с условиями их работы. Для нормальных условий используются так называемые открытые и защищенные двигатели, охлаждаемые воздухом помещения, в котором они устанавливаются.
Воздух продувается через каналы машины посредством вентилятора, размещенного на валу двигателя. В агрессивных средах используются закрытые двигатели, охлаждение которых осуществляется за счет внешней ребристой поверхности или наружного обдува. Наконец, выпускаются специальные двигатели для взрывоопасной среды.
Специфические требования к конструктивным формам двигателя предъявляются при необходимости обеспечения высокого быстродействия — быстрого протекания процессов разгона, торможения. В этом случае двигатель должен иметь специальную геометрию — малый диаметр якоря при большой его длине.
Для уменьшения индуктивности обмотки ее укладывают не в пазы, а на поверхность гладкого якоря. Крепится обмотка клеющими составами типа эпоксидной смолы. При малой индуктивности обмотки существенно улучшаются условия коммутации на коллекторе, отпадает необходимость в дополнительных полюсах, может быть использован коллектор меньших размеров. Последнее дополнительно уменьшает момент инерции якоря двигателя.
Еще большие возможности для снижения механической инерции дает использование полого якоря, представляющего собой цилиндр из изоляционного материала. На поверхности этого цилиндра располагается обмотка, изготовляемая печатным способом, штамповкой или из про волоки по шаблону на специальном станке. Крепление обмотки осуществляется клеющими материалами.
Внутри вращающегося цилиндра располагается стальной сердечник, необходимый для создания путей прохождения магнитного потока. В двигателях с гладким и полым якорями вследствие увеличения зазоров в магнитной цепи, обусловленного внесением в них обмотки и изоляционных материалов, требуемая намагничивающая сила для проведения необходимого магнитного потока существенно возрастает. Соответственно магнитная система получается более развитой.
К числу малоинерционных двигателей относятся также двигатели с дисковыми якорями. Диски, на которые наносятся или наклеиваются обмотки, изготовляются из тонкого изоляционного материала, не подверженного короблению, например из стекла. Магнитная система при двухполюсном исполнении представляет собой две скобы, на одной из которых размещены обмотки возбуждения. В связи с малой индуктивностью обмотки якоря машина, как правило, не имеет коллектора и съем тока осуществляется щетками непосредственно с обмотки.
Следует еще упомянуть о линейном двигателе, обеспечивающем не вращательное движение, а поступательное. Он представляет собой двигатель, магнитная система которого как бы развернута и полюсы устанавливаются на линии движения якоря и соответствующего рабочего органа машины. Якорь обычно выполняется как малоинерционный. Габариты и стоимость двигателя велики, так как необходимо значительное число полюсов для обеспечения перемещения на заданном отрезке пути.
Пуск двигателей постоянного тока
В начальный момент пуска двигателя якорь неподвижен и противо-э. д. с. и напряжение в якоре равна нулю, поэтому Iп = U / Rя.
Сопротивление цепи якоря невелико, поэтому пусковой ток превышает в 10 — 20 раз и более номинальный. Это может вызвать значительные электродинамические усилия в обмотке якоря и чрезмерный ее перегрев, поэтому пуск двигателя производят с помощью пусковых реостатов — активных сопротивлений, включаемых в цепь якоря.
Двигатели мощностью до 1 кВт допускают прямой пуск.
Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя. Реостат выполняют ступенчатым для улучшения плавности пуска электродвигателя.
В начале пуска вводится все сопротивление реостата. По мере увеличения скорости якоря возникает противо-э. д. с, которая ограничивает пусковые токи. Постепенно выводя ступень за ступенью сопротивление реостата из цепи якоря, увеличивают подводимое к якорю напряжение.
Регулирование частоты вращения электродвигателя постоянного тока
Частота вращения двигателя постоянного тока:
где U — напряжение питающей сети; Iя — ток якоря; R я — сопротивление цепн якоря; kc — коэффициент, характеризующий магнитную систему; Ф — магнитный поток электродвигателя.
Из формулы видно, что частоту вращения электродвигателя постоянного тока можно регулировать тремя путями: изменением потока возбуждения электродвигателя, изменением подводимого к электродвигателю напряжения и изменением сопротивления в цепи якоря.
Наиболее широкое применение получили первые два способа регулирования, третий способ применяют редко: он неэкономичен, скорость двигателя при этом значительно зависит от колебаний нагрузки. Механические характеристики, которые при этом получаются, показаны на рисунке .
Механические характеристики электродвигателя постоянного тока при различных способах регулирования частоты вращения
Жирная прямая — это естественная зависимость скорости от момента на валу, или , что то же, от тока якоря. Прямая естественной механической характеристики несколько отклоняется от горизонтальном штриховой линии. Это отклонение называют нестабильностью, нежесткостью, иногда статизмом. Группа непаралельных прямых I соответствует регулированию скорости возбуждением, параллельные прямые II получаются в результате изменения напряжения якоря, наконец, веер III — это результат введения в цепь якоря активного сопротивления.
Величину тока возбуждения двигателя постоянного тока можно регулировать с помощью реостата или любого устройства, активное сопротивление которого можно изменять по величине, например транзистора. При увеличении сопротивления в цепи ток возбуждения уменьшается, частота вращения двигателя увеличивается. При ослаблении магнитного потока механические характеристики располагаются выше естественной (т. е. выше характеристики при отсутствии реостата). Повышение частоты вращения двигателя вызывает усиление искрения под щетками. Кроме того, при работе электродвигателя с ослабленным потоком уменьшается устойчивость его работы, особенно при переменных нагрузках на валу. Поэтому пределы регулирования скорости таким способом не превышают 1,25 — 1,3 от номинальной.
Регулирование изменением напряжения требует источника постоянного тока, например генератора или преобразователя. Такое регулирование используют во всех промышленных системах электропривода: генератор — д вигатель постоянного тока (Г — ДПТ), электромашинный усилитель — двигатель постоянного тока (ЭМУ — ДПТ), магнитный усилитель — двигатель постоянного тока (МУ — ДПТ), тиристорный преобразователь — двигатель постоянного тока (Т — ДПТ).

Торможение электродвигателей постоянного тока
В электроприводах с электродвигателями постоянного тока применяют три способа торможения: динамическое, рекуперативное и торможение противовключением.
Динамическое торможение электродвигателя постоянного тока осуществляется путем замыкания обмотки якоря двигателя накоротко или через резистор. При этом электродвигатель постоянного тока начинает работать как генератор , преобразуя запасенную им механическую энергию в электрическую. Эта энергия выделяется в виде тепла в сопротивлении, на которое замкнута обмотка якоря. Динамическое торможение обеспечивает точный останов электродвигателя.

Рекуперативное торможение электродвигателя постоянного тока осуществляется в том случае, когда включенный в сеть электродвигатель вращается исполнительным механизмом со скоростью, превышающей скорость идеального холостого хода. Тогда э. д. с, наведенная в обмотке двигателя, превысит значение напряжения сети, ток в обмотке двигателя изменяет направление на противоположное. Электродвигатель переходит на работу в генераторном режиме, отдавая энергию в сеть. Одновременно на его валу возникает тормозной момент. Такой режим может быть получен в приводах подъемных механизмов при опускании груза, а также при регулировании скорости двигателя и во время тормозных процессов в электроприводах постоянного тока.
Рекуперативное торможение двигателя постоянного тока является наиболее экономичным способом, так как в этом случае происходит возврат в сеть электроэнергии. В электроприводе металлорежущих станков этот способ применяют при регулировании скорости в системах Г — ДПТ и ЭМУ — ДПТ.
Торможение противовключением электродвигателя постоянного тока осуществляется путем изменения полярности напряжения и тока в обмотке якоря. При взаимодействии тока якоря с магнитным полем обмотки возбуждения создается тормозной момент, который уменьшается по мере уменьшения частоты вращения электродвигателя. При уменьшении частоты вращения электродвигателя до нуля электродвигатель должен быть отключен от сети, иначе он начнет разворачиваться в обратную сторону.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети: