Тема 4 Механические и скоростные характеристики двигателя постоянного тока
- Машины постоянного тока параллельного возбуждения (шунтовые)
- Машины постоянного тока последовательного возбуждения (сериесные)
- Машины постоянного тока независимого возбуждения
- Машины постоянного тока смешанного возбуждения
Основные уравнения и соотношения машин постоянного тока.
- Уравнение баланса напряжений якорной цепи
U=E+Iя (Rя +Rд) – для двигателя Под якорной цепью понимают обмотку якоря дополнительных полюсов, сопротивление перехода щетки коллектора. Добавочное сопротивление включают последовательно с обмоткой якоря. Е – ЭДС якоря; U– напряжение подведенное к цепи якоря; Iя – ток якоря; Rя – сопротивление якорной обмотки дополнительных полюсов и перехода щетка – коллектор; Rд – добавочное сопротивление цеп якоря 2. Уравнение пропорциональности ЭДС и частоты вращения Е = Се Фw; Е = Се Фn;w=pn/ 30 Се – коэффициент пропорциональности, включает в себя конструкционные параметры двигателя (якоря) w- угловая скорость (с -1 ) 3. Выражение для определения электромагнитного вращающегося момента. М = См ФIя; M– момент развиваемый двигателем . 4.Скоростная характеристика U=CeФw+Iя (Rя +Rд) ;
;  5. Механическая характеристика
5. Механическая характеристика  М = См ФIя
М = См ФIя Се=СмМеханическая характеристика двигателя постоянного тока независимого возбуждения или шунтового (параллельного) возбуждения
Се=СмМеханическая характеристика двигателя постоянного тока независимого возбуждения или шунтового (параллельного) возбуждения Сопротивление обмотки возбуждения значительно больше сопротивления якорной, следовательно Iв составляет 5…10% токаIя. Iв = (0,05…0,1)Iя При номинальном напряжении по ней протекает номинальный ток при отсутствии добавочных сопротивлений. Характерная особенность двигателей постоянного тока то, что ток в обмотке возбуждения Iв не зависит от тока якоряIя, соответственно от нагрузки машины. Ток якоря зависит от нагрузки машины. Р =UIя от потребляемой мощности Допускаем, что ток возбуждения и магнитный поток являются постоянными при любой нагрузке. Iв=const; Ф = const.
Сопротивление обмотки возбуждения значительно больше сопротивления якорной, следовательно Iв составляет 5…10% токаIя. Iв = (0,05…0,1)Iя При номинальном напряжении по ней протекает номинальный ток при отсутствии добавочных сопротивлений. Характерная особенность двигателей постоянного тока то, что ток в обмотке возбуждения Iв не зависит от тока якоряIя, соответственно от нагрузки машины. Ток якоря зависит от нагрузки машины. Р =UIя от потребляемой мощности Допускаем, что ток возбуждения и магнитный поток являются постоянными при любой нагрузке. Iв=const; Ф = const.
Скоростная характеристика
 ; (y=Rx+b–прямая)
; (y=Rx+b–прямая)  При повышении тока якоря понижается угловая частота
При повышении тока якоря понижается угловая частота  w0 = U / СФточка идеального холостого хода
w0 = U / СФточка идеального холостого хода  — пусковой ток якоря при введении добавочного сопротивления
— пусковой ток якоря при введении добавочного сопротивления  Режим при токе якоря равным . называется режимом идеального холостого хода, при этом двигатель постоянного тока имеет частоту вращения w0 = U / СФ. При пуске w0 =0. Ток зависит лишь от величиныRя иRд. При этом пусковой ток больше номинального токаIп >Iном; Rдя – выбирается таким образом, что бы пусковой ток не превышал номинального более чем в 2,5 раза. При отсутствииRд возникает аварийный режим при которомIя во много раз (10…30) превышает номинальный ток двигателя. Следовательно пуск осуществляют только при введенном добавочном сопротивлении.
Режим при токе якоря равным . называется режимом идеального холостого хода, при этом двигатель постоянного тока имеет частоту вращения w0 = U / СФ. При пуске w0 =0. Ток зависит лишь от величиныRя иRд. При этом пусковой ток больше номинального токаIп >Iном; Rдя – выбирается таким образом, что бы пусковой ток не превышал номинального более чем в 2,5 раза. При отсутствииRд возникает аварийный режим при которомIя во много раз (10…30) превышает номинальный ток двигателя. Следовательно пуск осуществляют только при введенном добавочном сопротивлении.
Механическая характеристика Механическая характеристика – имеет такой же вид как и скоростная

 При повышении момента понижается угловая частота Различают естественные и искусственные характеристики машин постоянного тока. Естественными называются характеристики при получении расчетных данных двигателя отсутствуют добавочные сопротивления. Искусственными называют характеристики полученные при изменении хотя бы одного параметра. Искусственные характеристики шунтовых двигателей постоянного тока.
При повышении момента понижается угловая частота Различают естественные и искусственные характеристики машин постоянного тока. Естественными называются характеристики при получении расчетных данных двигателя отсутствуют добавочные сопротивления. Искусственными называют характеристики полученные при изменении хотя бы одного параметра. Искусственные характеристики шунтовых двигателей постоянного тока.



 При естественной характеристики при изменении нагрузки машины постоянного тока от 0 до номинальной, скорость изменяется в пределах 10%. Dw- изменение скорости характеризует потери в цепи якоря. Величина характеризующая отличие номинальной частоты вращения от частоты идеального холостого хода называется скольжением.
При естественной характеристики при изменении нагрузки машины постоянного тока от 0 до номинальной, скорость изменяется в пределах 10%. Dw- изменение скорости характеризует потери в цепи якоря. Величина характеризующая отличие номинальной частоты вращения от частоты идеального холостого хода называется скольжением.  Для шунтовых двигателей постоянного тока, S=3…6%, то есть характеристика жесткая. Механическая характеристика двигателя постоянного тока
Для шунтовых двигателей постоянного тока, S=3…6%, то есть характеристика жесткая. Механическая характеристика двигателя постоянного тока  (1)
(1)  Искусственные характеристики можно получить исходя из механической характеристики (1) изменяя следующие параметры:
Искусственные характеристики можно получить исходя из механической характеристики (1) изменяя следующие параметры:
- напряжение сети
- величину добавочного сопротивления
 Величину магнитного потокаRд с помощью изменения тока обмотки возбуждения. ИзменяяRд якоря.
Величину магнитного потокаRд с помощью изменения тока обмотки возбуждения. ИзменяяRд якоря.
 Rд2 >Rд1
Rд2 >Rд1 w0=U/ СФ
w0=U/ СФ При увеличении Rд характеристики становятся мягче. При w=0 всё напряжение теряется в цепи якоря.
При увеличении Rд характеристики становятся мягче. При w=0 всё напряжение теряется в цепи якоря.
Скоростные характеристики.
Скоростные характеристики дают зависимость скорости вращения п от полезной мощности Р2 на валу двигателя в случае, если напряжение U сети и сопротивление rв регулировочного реостата цепи возбуждения остаются неизменными, т. е. n=f(P2), при U=const и rв = const.
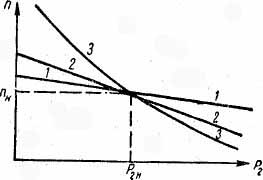
Рис. 3. Скоростные характеристики
С возрастанием тока якоря при увеличении механической нагрузки двигателя параллельного возбуждения одновременно увеличивается падения напряжения в якоре и появляется реакция якоря, которая обычно действует размагничивающим образом. Первая причина стремится уменьшить скорость вращения двигателя, вторая — увеличить. Действие падения напряжения в якоре обычно оказывает большее влияние. Поэтому скоростная характеристика двигателя параллельного возбуждения имеет слегка падающий характер (кривая 1, рис. 3).
В двигателе последовательного возбуждения ток якоря является током возбуждения. В результате скоростная характеристика двигателя с последовательным возбуждением имеет характер, близкий к гиперболическому. При увеличении нагрузки по мере насыщения магнитной цепи характеристика приобретает более прямолинейный характер (кривая 3 на рис. 3).
В компаундном двигателе при согласном включении обмоток скоростная характеристика занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения (кривая 2).
Моментные характеристики.
Моментные характеристики показывают, как изменяется момент М при изменении полезной мощности Р2 на валу двигателя, если напряжение U сети и сопротивление rв регулировочного реостата в цепи возбуждения остаются неизменными, т. е. М = f(P2), при U=const, rв=const.
Полезный момент на валу двигателя

Если скорость вращения двигателя параллельного возбуждения не изменялась бы с нагрузкой, то зависимость момента Ммех от полезной мощности графически представляла бы прямую линию, проходящую через начало координат. В действительности скорость вращения с увеличением нагрузки падает. Поэтому характеристика полезного момента несколько загибается кверху (кривая 2, рис. 4). При этом кривая электромагнитного момента М проходит выше кривой полезного момента Ммех на постоянную величину, равную моменту холостого хода М0 (кривая 1).
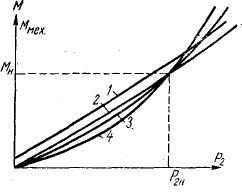
Рис. 4. Моментные характеристики
В двигателе последовательного возбуждения вид моментной характеристики приближается к параболическому, так как изменение момента от тока нагрузки происходит, по закону параболы, пока сталь не насыщена. По мере насыщения зависимость приобретает более прямолинейный характер (кривая 4). В компаундном двигателе моментная характеристика (кривая 3) занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения.
Характеристика изменения коэффициента полезного действия.
Кривая зависимости к. п. д. от нагрузки имеет характерный для всех двигателей вид (рис 5). Кривая проходит через начало координат и быстро растет при увеличении полезной мощности до 1/4 номинальной. При мощности Р2, равной примерно 2/3 номинальной, к. п. д. обычно достигает максимального значения. При увеличении нагрузки до номинальной к. п. д. остается постоянным или незначительно падает.
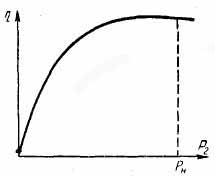
Рис. 5. Изменение к. п. д. двигателя
Механическая характеристика
Важнейшей характеристикой двигателя является механическая n(M). Она показывает, как зависит частота вращения двигателя от развиваемого момента. Если к обмоткам двигателя подведены номинальные напряжения и отсутствуют дополнительные резисторы в его цепях, то двигатель имеет механическую характеристику, называемую естественной. На естественной характеристике находится точка, соответствующая номинальным данным двигателя (Мн, Ря и т.д.). Если же напряжение на обмотке якоря меньше номинального, либо Iв < Iвн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
Преобразовав выражение (3) относительно частоты вращения, получим уравнение электромеханической характеристики n(Iя):
(7)
После замены в уравнении (7) тока Iя согласно формуле (1), получим уравнение механической характеристики n(М):
(8)
При Ф = соnst, электромеханическая n(Iя) и механическая n(М) характеристики двигателя параллельного возбуждения представляют собой прямые линии. Так как за счет реакции якоря магнитный поток немного изменяется, то характеристики в действительности несколько отличаются от прямых.
При работе вхолостую (М = 0) двигатель имеет частоту вращения холостого хода, определяемую первым членом уравнения (8). С увеличением нагрузки n уменьшается. Как следует из уравнения (8), это объясняется наличием сопротивления якоря rя.
Поскольку rя не велико, частота вращения двигателя при увеличении момента изменяется мало, и двигатель имеет жесткую естественную механическую характеристику (рис.6, характеристика 1).
Из уравнения (8) следует, что регулировать частоту вращения при заданной постоянной нагрузке (М = const) можно тремя способами:
а) изменением сопротивления цепи якоря;
б) изменением магнитного потока двигателя;
в) изменением напряжения на зажимах якоря.

Рис. 6 Механические характеристики
Для регулирования частоты вращения первым способом в цепь якоря. должно быть включено добавочное сопротивление rд. Тогда сопротивление в уравнении (8) необходимо заменить на rя + rд.
Как следует из уравнения (8), частота вращения n связана с сопротивлением цепи якоря rя + rд при постоянной нагрузке (М = const) линейной зависимостью, т.е. при увеличении сопротивления частота вращения уменьшается. Разным сопротивлениям rд соответствуют различные искусственные механические характеристики, одна из которых приведена на рис.2 (характеристика 2). С помощью характеристики 2 при заданном моменте М1 можно получить частоту вращения n2.
Изменение частоты вращения вторым способом осуществляется с помощью регулируемого источника напряжения UD2. Изменяя его напряжение регулятором R2, можно изменить ток возбуждения IВ и тем самым магнитный поток двигателя. Как видно из уравнения (8), при постоянной нагрузке (М = соnst) частота вращения находится в сложной зависимости от магнитного потока Ф. Анализ уравнения (8) показывает, что в некотором диапазоне изменения магнитного потока Ф уменьшение последнего приводит к увеличению частоты вращения. Именно этот диапазон изменения потока используют при регулировании частоты вращения.
Каждому значению магнитного потока соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.2 (характеристика 4). С помощью характеристики 4 при моменте М1 можно получить частоту вращения n4.
Чтобы регулировать частоту вращения изменением напряжения на зажимах якоря, необходимо иметь относительно мощный регулируемый источник напряжения. Каждому значению напряжения соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.2(характеристика 3). С помощью характеристики 3 при заданном моменте М1 можно получить частоту вращения n3.
Скоростная характеристика двигателя постоянного тока
Главная ![]() Электродвигатели
Электродвигатели ![]() Электродвигатели со смешанным возбуждением
Электродвигатели со смешанным возбуждением ![]() Скоростные и механические характеристики электродвигателя постоянного тока со смешанным возбуждением
Скоростные и механические характеристики электродвигателя постоянного тока со смешанным возбуждением
Выведенные выше уравнения скоростной и механической характеристик для электродвигателей с параллельным и последовательным возбуждением полностью справедливы и для электродвигателей со смешанным возбуждением. Они могут быть легко выведены из выражений, составленных на основе законов Кирхгофа, и имеют следующий вид.
По указанным уравнениям могут быть построены скоростные и механические характеристики электродвигателя в любом режиме. Правда, построение характеристик по уравнениям (71) — (74) осложняется тем, что магнитный поток возбуждения для рассматриваемых электродвигателей не является величиной постоянной, а определенным образом зависит от нагрузки (см. рис. 32, а). Выразить аналитически магнитный поток через ток якоря в простой форме и с достаточной степенью точности не представляется возможным, поэтому обычно для практического построения скоростных и механических характеристик уравнениями (71) — (74) не пользуются. На практике используется естественная скоростная характеристика n = f (I я ), приводимая для каждого типа электродвигателя в каталогах. Эта характеристика имеет вид, показанный на рис. 33. В каталогах для каждого типа электродвигателя приводятся также зависимости М=f (I я ), имеющие вид, показанный на рис. 32, б.
Располагая характеристиками п = f(I я ) и М = f(I я ), нетрудно построить естественную механическую характеристику электродвигателя п = f(М), которая по виду не отличается от естественной скоростной характеристики.
Анализируя уравнения (71) —(74), нетрудно заметить, что при работе вхолостую (I я ?0) магнитный поток электродвигателя Ф 0 >0 ( см. рис. 32, а ) и создается током параллельной обмотки возбуждения (Ф 0 = Ф шов ). Поэтому электродвигатель со смешанным возбуждением, в отличие от электродвигателей с последовательным возбуждением, имеет конечную скорость холостого хода n 0 , которую можно получить, приняв I я = 0 (или М = 0) в любом из уравнений (71) — (74):
Обычно для крановых электродвигателей со смешанным возбуждением n 0 ? 1,5 п н . Таким образом, данные электродвигатели можно пускать в ход, не опасаясь разноса; они могут, так же как и электродвигатели с параллельным возбуждением, автоматически переходить в режим торможения с отдачей энергии в сеть при увеличении их скорости выше скорости п 0 .
Уравнения (71)—(74) показывают, что при увеличении нагрузки скорость электродвигателя уменьшается от По не только за счет увеличения падения напряжения в сопротивлении цепи якоря, но и за счет увеличения магнитного потока. Поэтому скоростные и механические характеристики рассматриваемого электродвигателя получаются менее жесткими, чем у электродвигателя с параллельным возбуждением, имеющего постоянный магнитный поток. По мере роста нагрузки и связанного с этим насыщения магнитной цепи жесткость характеристики повышается. Характеристики электродвигателя со смешанным возбуждением занимают промежуточное положение между характеристиками электродвигателей с параллельным и последовательным возбуждением. На рис. 34 для сравнения показаны естественные характеристики электродвигателей всех трех типов.
Если в номинальном режиме большая часть полезного магнитного потока электродвигателя создается параллельной обмоткой возбуждения, то его характеристики приближаются по виду к характеристикам электродвигателя с параллельным возбуждением. В противном случае характеристики будут приближаться, по виду к характеристикам электродвигателя с последовательным возбуждением. Как указывалось, для подъемно- транспортных машин выпускаются электродвигатели, в которых половина ампер-витков возбуждения создается параллельной обмоткой, а половина — последовательной. Следовательно, характеристики таких электродвигателей должны занимать какое-то среднее положение между характеристиками ранее рассмотренных электродвигателей, т. е. быть менее жесткими, чем у электродвигателей с параллельным возбуждением, и более жесткими, чем у электродвигателей с последовательным возбуждением, у которых при изменении нагрузки магнитный поток изменяется в более широких пределах.
- Механические и скоростные характеристики работы электродвигателя
- Особенности электродвигателя постоянного тока со смешанным возбуждением
- Пуск в ход электродвигателя постоянного тока со смешанным возбуждением
- Электрическое торможение электродвигателей со смешаним возбуждением
- Механические характеристики асинхронного электродвигателя
Скоростная характеристика двигателя постоянного тока
Главная ![]() Электродвигатели
Электродвигатели ![]() Электродвигатели с параллельным возбуждением
Электродвигатели с параллельным возбуждением ![]() Скоростные и механические характеристики электродвигателей постоянного тока с параллельным возбуждением
Скоростные и механические характеристики электродвигателей постоянного тока с параллельным возбуждением
Выведенные в предыдущем параграфе уравнения скоростных и механических характеристик справедливы для любого электродвигателя постоянного тока. Однако это не значит, что для всех электродвигателей характеристики одинаковы. Наоборот, как будет показано, между характеристиками различных электродвигателей постоянного тока имеются существенные различия.
Анализируя любое из полученных в статье особенности электродвигатели постоянного тока уравнений, нетрудно заметить, что все они являются уравнениями прямых линий, если U =соnst и Ф = соnst, т.е. механическая и скоростная характеристики электродвигателя постоянного тока с параллельным возбуждением прямолинейны и :при соответствующем выборе масштабов они могут быть представлены одной прямой (рис. 9).
Действительно, когда электродвигатель работает вхолостую, развиваемый им момент равен нулю, так как нулю равен момент сопротивления на валу двигателя. При этом, согласно выражению (28), нулю должен быть равен и ток в обмотке якоря. Таким образом, из уравнения (25) или (29) может быть получена скорость идеального холостого хода электродвигателя
Нужно иметь в виду, что фактическая скорость холостого хода электродвигателя всегда несколько ниже скорости идеального» холостого хода, так как в действительности момент сопротивления на валу электродвигателя не может быть равен нулю даже при отсутствии нагрузки на электродвигатель, а следовательно, и ток действительного холостого хода электродвигателя нулю не равен.
Если нагрузка на электродвигатель возрастает (т. е. возрастает момент сопротивления на его валу), то возрастает развиваемый электродвигателем вращающий момент и растет ток в его якорной обмотке. Это должно вызывать, согласно уравнениям (25) и (29), снижение скорости вращения электродвигателя. В режиме короткого замыкания электродвигателя (режим стоянки под током) n = 0, а ток короткого замыкания Аналогично, момент короткого замыкания М к = кФІ я . к . Таким образом, скоростная характеристика электродвигателя постоянного тока с параллельным возбуждением п = f(І я ) и механическая характеристика п = f(М) пересекают оси координат в совершенно определенных точках, соединив которые, можно получить указанные характеристики, представленные одной прямой (см. рис. 9). На рис. 9, помимо естественной характеристики, показан ряд искусственных характеристик двигателя при различных дополнительных сопротивлениях R в якорной цепи. Из уравнений (27) и (30) вытекает, что искусственные характеристики тоже прямолинейны, исходят из общей точки холостого хода и лежат ниже естественной характеристики, т. е. чем выше дополнительное сопротивление R в якорной цепи, тем круче (или мягче) характеристика электродвигателя. На рисунке обозначены: М н (I я . н ) — номинальный момент и ток якоря; М к (I я.к ) — момент и ток якоря при заторможенном якоре.
Как видно из уравнений, скорость электродвигателя параллельного возбуждения меняется при различных нагрузках за счет изменения падения напряжения в сопротивлении якоря. Поскольку сопротивления якорей машин постоянного тока невелики, скорость электродвигателей параллельного возбуждения меняется незначительно, особенно при работе на естественной характеристике. Так, для электродвигателей мощностью от 5 до 100 квт перепад скорости пои номинальной нагрузке
где большие значения соответствуют электродвигателям меньшей мощности.
Ввиду прямолинейности, практическое построение характеристик электродвигателя с параллельным возбуждением выполнить нетрудно. Для этого достаточно иметь координаты двух точек. Обычно естественную характеристику электродвигателя строят по скорости идеального холостого хода, номинальной скорости вращения и номинальному моменту (или току). Скорость идеального холостого хода электродвигателя может быть вычислена следующим образом.
Против э. д. с. при работе электродвигателя в номинальном режиме на естественной характеристике
а на холостом ходу
Разделив второе выражение на первое, получим
В выражении (34) все величины, кроме R я могут быть взяты из паспорта электродвигателя. Величина R я может быть взята из формуляра на электродвигатель, определена измерением или приближенно из следующего выражения:
где Р н — номинальная мощность электродвигателя, квт;
? н — к.п.д. электродвигателя при номинальной нагрузке.
Выражение (35) составлено исходя из предположения, что при номинальной нагрузке электродвигателя потери мощности в сопротивлении якоря равны примерно половине общих потерь в электродвигателе. Если величина R определяется измерением, то нужно иметь в виду, что сопротивление якоря включает в себя сопротивления обмотки якоря, обмотки дополнительных полюсов, щеток и сопротивления компенсационной обмотки (если она имеется), соединенных последовательно.
Выше указывалось, что вращающий момент электродвигателя автоматически следует за моментом сопротивления механизма. Физическая сущность этого процесса состоит в следующем. Если электродвигатель работает с установившейся скоростью, то развиваемый им вращающий момент М 1 равен моменту сопротивления на его валу М с . Если же момент сопротивления возрастет до M с2 > M 1 , то скорость электродвигателя начнет уменьшаться. При этом уменьшается и против э. д. с., а ток в обмотке якоря, согласно выражению (22), будет возрастать, что вызовет возрастание вращающего момента. Уменьшение числа оборотов будет происходить до тех пор, пока вращающий момент не станет равным моменту сопротивления М с2 .
При уменьшении момента сопротивления происходит обратный процесс. Если момент сопротивления станет меньше вращающего момента, развиваемого электродвигателем, то скорость вращения последнего начнет возрастать. Это вызовет возрастание противо э. д. с., а значит, уменьшение тока и вращающего момента. Процесс прекратится, когда вращающий момент станет равным моменту сопротивления на валу электродвигателя.
- Механические и скоростные характеристики работы электродвигателя
- Регулирование скорости вращения электродвигателя
- Скоростные и механические характеристики электродвигателей с параллельным возбуждением
- Регулирование скорости вращения электродвигателя последовательного возбуждения
- Регулирование скорости вращения электродвигателя постоянного тока со смешанным возбуждением