Взаимное пересечение поверхностей
265*. Построить: а) проекции линии взаимного пересечения поверхностей призмы и сферы; б) натуральный вид сечения А—А (рис. 248, а).
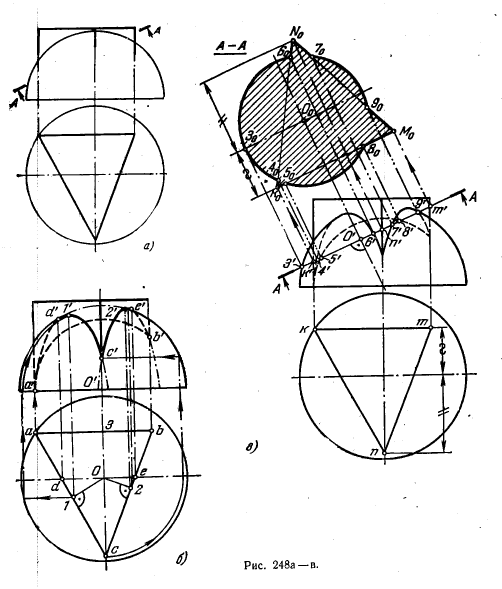
Решение. В данном случае одна из проекций линии пересечения, а именно горизонтальная, известна, так как сливается с горизонт. проекцией боковой поверхности призмы. Это значительно упрощает построение: оно сводится к нахождению фронт. проекций точек, принадлежащих поверхности сферы, по их горизонт. проекциям, Так, проекция с’ (рис. 248, б) найдена при помощи горизонтали на поверхности сферы; эта горизонталь имеет радиус Ос. Точки d’ и е’ получены на фронт. проекции главного меридиана сферы по проекциям d и e, точка а’ — на фронт. проекции экватора.
Другим обстоятельством, имеющим большое значение в построении, является то, что получаемая линия пересечения известна: каждая боковая грань призмы пересекает поверхность сферы по дуге окружности. Из этих дуг одна, лежащая на задней грани, проецируется на пл. V без искажения; ее радиус равен а—3. Две другие дуги проецируются на пл. V в виде дуг эллипсов.
Проведя перпендикуляры О—1 и 0—2, мы определяем горизонт. проекции вершин эллипсов—точки 1 и 2; по ним находим проекции 1′ и 2′. На рис. 248, б дуги эллипсов показаны за точками с’ и b’ штрих-пунктирными линиями. Тело на рис. 248, б представлено как монолит (например, отливка). Поэтому сечение на рис. 248, в представлено в виде одной фигуры, что подчеркивается и штриховкой.
266. Построить: а) проекции линии пересечения поверхностей призмы и цилиндра; б) натуральный вид сечения А — А (рис. 249).
Указание. горизонт. проекция линии пересечения в задачах 266 и 267 совпадает с частью соответствующей проекции тела.
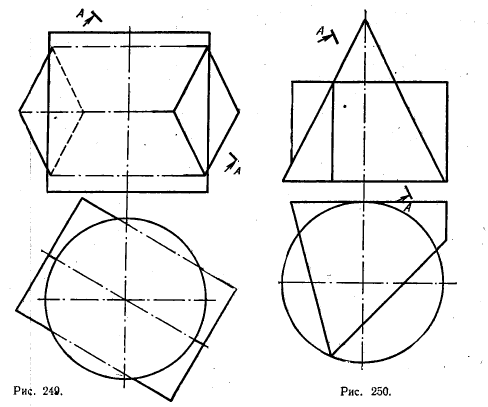
267. Построить: а) проекции линии пересечения поверхностей призмы и кодуса; б) натуральный вид сечения А —А (рис. 250).
268. Построить: а) проекции линии пересечения поверхностей призмы и кругового кольца; б) натуральный вид сечения А — А рис. 251).
Указание. фронт. проекция линии пересечения совпадает с частью соответствующей проекции призмы.
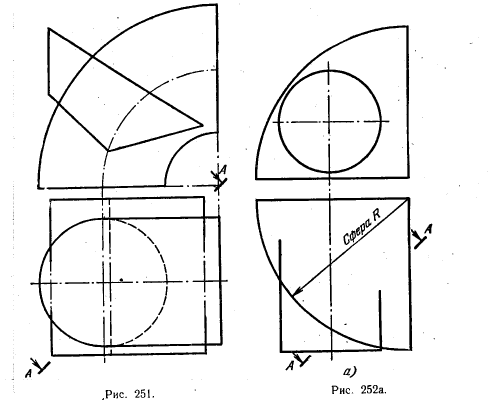
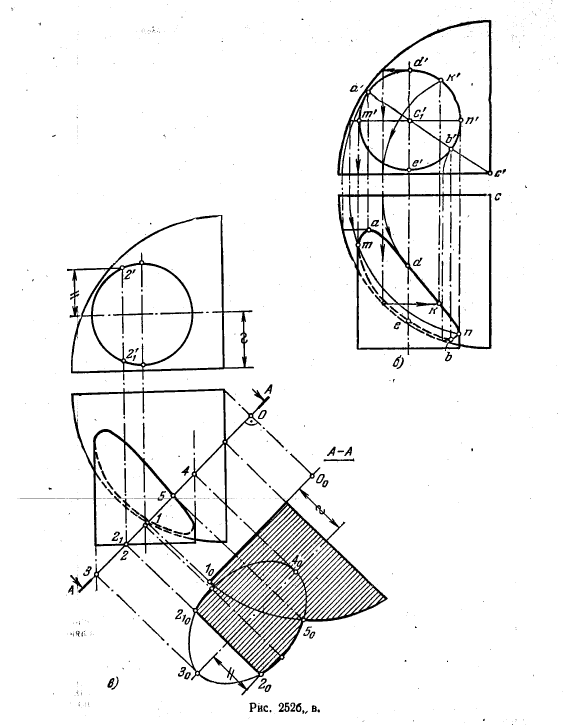
269*. Построить: а) проекции линии пересечения поверхностей цилиндра и сферы; б) натуральный вид сечения А — А (рис. 252, а).
Решение. Все точки фронт. проекции цилиндра (рис. 252, 6) могут быть приняты за фронт. проекции точек, принадлежащих искомой линии пересечения. А отсюда легко найти, например, проекции d, m, n на горизонт. проекциях соответствующих параллелей сферы, проекции a, b, k на горизонт. проекциях дуг окружностей, проводимых на фронт. проекции сферы радиусами с’а’, с’b’, c’k’. Точки а и b представляют собою горизонт. проекции характерных точек линии пересечения, наименее и наиболее удаленных от пл. V. Проекции m’, m и n’, n определяют точки пересечения очерковых образующих цилиндра со сферой.
Изображенное тело — сочетание части сферы и цилиндра — рассматривается как монолитное. При построении сечения А — А получено сечение части сферы, ограниченное дугой окружности радиуса О010 и двумя отрезками прямых, по которым плоскость А — А пересекает «четвертинки» кругов, ограничивающих справа и снизу рассматриваемую часть сферы. Затем получена часть эллипса (на рис. 252, дон показан целиком) как сечение цилиндра. Отрезок 20210 получен от пересечения плоскости, ограничивающей цилиндр.
270. Построить: а) проекции линии пересечения поверхностей цилиндра и конуса; б) натуральный вид сечения А —А (рис. 253).
Указание. фронт. проекция линии пересечения совпадает с частью соответствующей проекции цилиндра.
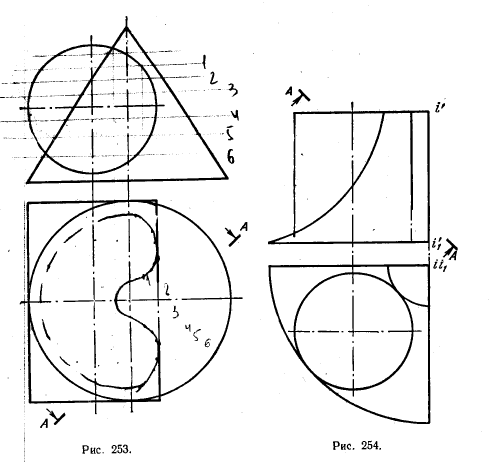
271. Построить: а) проекции линии пересечения поверхностей цилиндра и тела вращения (с осью III, перпендикулярной к пл. Н) б) натуральный вид сечения А — А (рис. 254).
Указание. горизонт. проекция линии пересечения совпадает с соответствующей проекцией цилиндра.
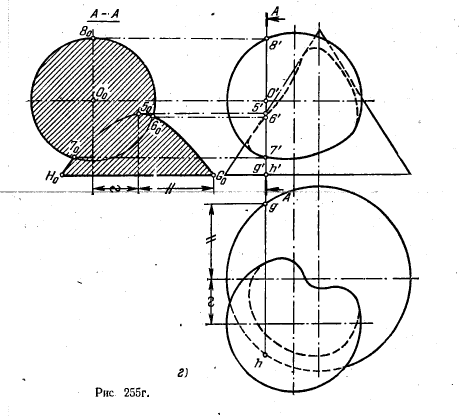
272*. Построить: а) проекции линии пересечения поверхностей конуса и сферы; б) натуральный вид сечения А — А (рис. 255, а).
Решение. В этом случае ни одна из проекций ни одного из данных тел не совпадает полностью или частично с проекциями искомой линии пересечения. Мы не можем исходить из того, что положение проекций ее точек нам известно, как это было в задачах 265 и 269. Поэтому мы используем здесь общий прием построения
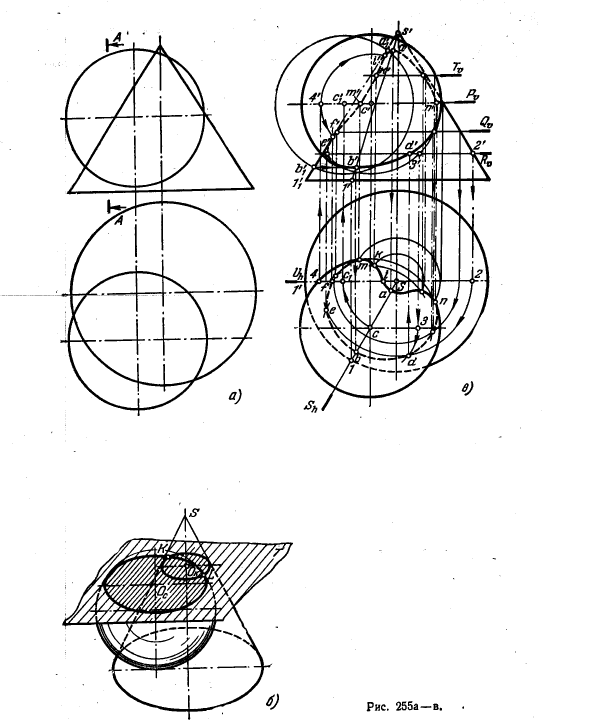
точек взаимного пересечения поверхностей, а именно введение вспомогательных секущих плоскостей (рис, 255, б), пересекающих каждую из заданных поверхностей по некоторым линиям, и определение точек, общих для этих поверхностей, в пересечении линий, полученных на них.
Учитывая свойство и положение заданных поверхностей, применим в данном случае серию секущих плоскостей, параллельных пл. Н. Каждая такая плоскость пересекает поверхности конуса и сферы по окружностям (рис. 255, в). Например,
пл. R на конусе дает окружность радиуса s—2, а на сфере окружность радиуса с—3. Эти окружности в своем пересечении определяют точки D и Е, общие для поверхностей конуса и сферы.
Но кроме точек, получаемых подобным образом, надо построить еще некоторые характерные точки, положение которых уточняет искомую линию. Это прежде всего высшая и низшая точки на фронт. проекции. Для их нахождения мы также используем некоторую пл. S: она проходит через ось конуса и через центр сферы и является для этих тел общей плоскостью симметрии. Пл. S пересекает поверхность конуса по образующим, а поверхность сферы по окружности; повернув пл. S вместе с полученными в ней линиями вокруг оси конуса до положения, параллельного пл. V, получим точки a’1 и b’1 а по ним сначала а’ и b’, затем а и b.
Имеют значение точки f’,f и i’, i на главном меридиане конуса, так как в них, определяются точки пересечения крайней образующей s’1′1,s—11 с поверхностью сферы; для нахождения этих точек взята вспомогательная пл. U, соответствующая главному меридиану конуса и рассекающая поверхность сферы по окружности радиуса с’4′.
Также следует найти точки на экваторе сферы, для чего в серии горизонтальных секущих плоскостей надо взять пл. Р: в точках m и n горизонт. проекция экватора смыкается с видимой частью проекции линии пересечения на пл. Н.
Сечение А — А (рис. 255, г) очерчено дугой окружности (от пересечения поверхности сферы), частями гиперболы (от пересечения конической поверхности) и отрезком Н0G0 (от пересечения основания конуса). Надо обратить внимание на смещение центра кругового сечения сферы относительно оси гиперболы.
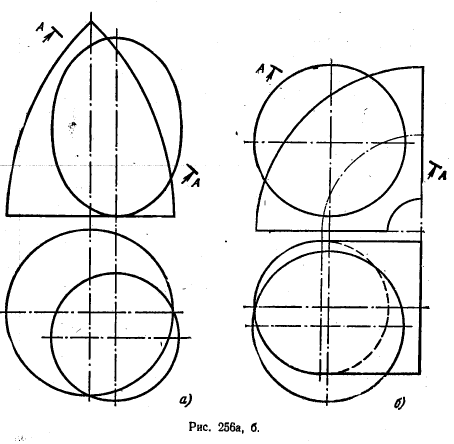
73. Построить проекции линий пересечения: а) поверхностей тора и эллипсоида вращения (рис. 256, а); б) поверхностей тора и сферы (рис. 256, б). В обоих случаях построить сечения А — А.
274*. Построить проекции линии пересечения поверхностей конуса и цилиндра (рис. 257, а).
Решение. Здесь так же, как и в задаче 272, приходится прибегать к вспомогательным секущим плоскостям. Какие же плоскости наиболее удобны в данном случае? Это плоскости, проходящие через вершину конуса и параллельные образующим цилиндра (рис. 257, б). Такие плоскости (например, пл. Р) пересекают обе поверхности по прямым—образующим, положение которых определяется точками
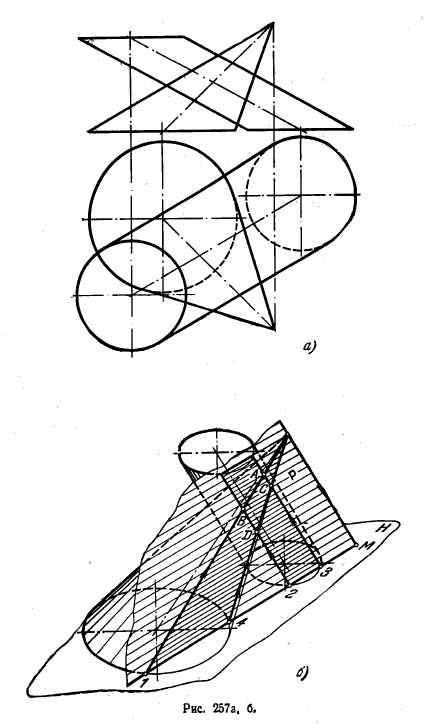
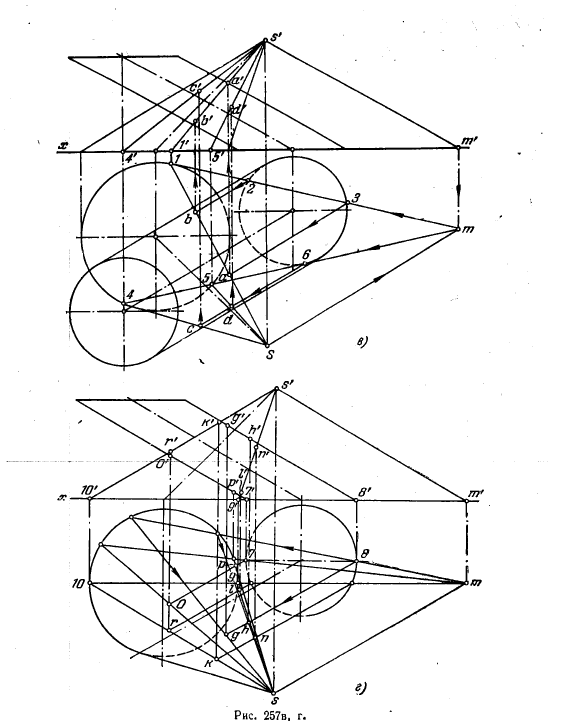
пересечения оснований данных тел со следом секущей плоскости на плоскости оснований. Построение показано на рис. 257, в.
Через точку s’,s проведена прямая параллельно образующей цилиндра; найдены проекции m’ и m горизонт. следа этой прямой.
Если горизонт. следы секущих плоскостей проводить через точку m так, чтобы каждый из них пересекал или касался оснований конуса и цилиндра, то на поверхностях цилиндра и конуса обнаруживаются образующие, в пересечении которых получаются точки искомой линии. Сначала займемся точками на образующих, являющихся очерковыми на горизонт. проекции. Проводим следы плоскостей по направлениям m-6 и m—1 касательно к окружностям оснований, получаем на каждой на поверхностей по три образующих: на конусе образующие s—1, s—5 и s—4, на цилиндре образующие из точек 6, 2 и 3.
Остается взять точки пересечения образующих — на горизонт. проекции точки a, b, с, d и на фронт. проекции а’, b’, с’, d’.
Теперь для нахождения точек, лежащих на очерковых образующих фронт. проекций тел, проводим еледы секущих плоскостей через горизонт. проекции концов соответствующих образующих — точки 7, 8, 9 и 10 (рис. 257, г).
Таким образом, находим точки g,h,k,l,n,o,p, a по ним фронтальные проекции.
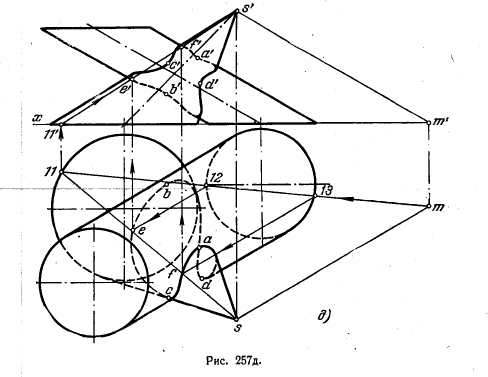
На рис. 257, д показан пример нахождения промежуточных точек (Е и F) и проведены обе проекции искомой линии.
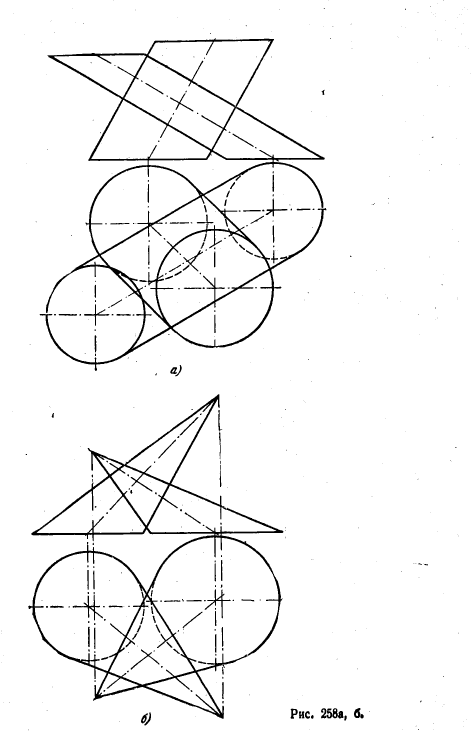
275. Построить проекции линий пересечения; а) двух цилиндрических поверхностей (рис. 258, а); б) двух конических поверхностей (рис. 258, 6).
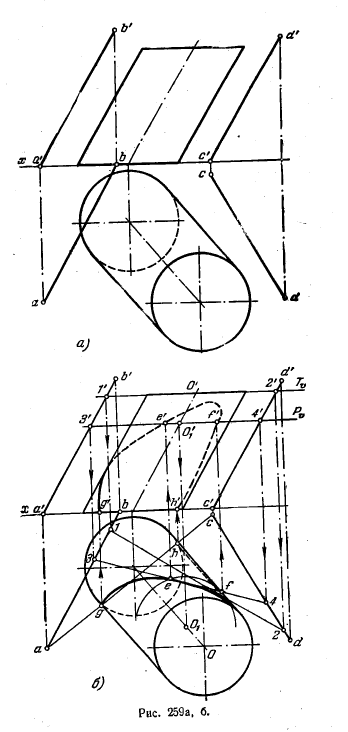
276*. Построить, проекции линии пересечения цилиндрической поверхности с косой плоскостью. Косая плоскость задана направляющими АВ и CD при пл. H как плоскости параллелизма (рис. 259, а).
Решение. Учитывая свойства и положение заданных поверхностей, а именно то, что цилиндр имеет ряд круговых сечений в плоскостях, параллельных пл. Н, и что образующие косой плоскости параллельны той же пл. Н, берем серию вспомогательных плоскостей (Т, Р н т. д.), параллельных пл. Н (рис. 259, б).
Они пересекают цилиндрическую поверхность по окружностям с центрами О, O1 и т. д., а косую плоскость — по прямым 1—2, 3—4 и т. д. горизонт. проекции искомых точек (е, f и др.) лежат на пересечении соответствующих — проекций этих окружностей и прямых. По горизонт. проекциям находим фронт. проекции — е’, f ‘ и др. Искомая линяя пересечения проходит через найденные точки.
На рис — 259, б показаны результат пересечения косой плоскости с цилиндром и самый цилиндр, а косая плоскость не изображена.
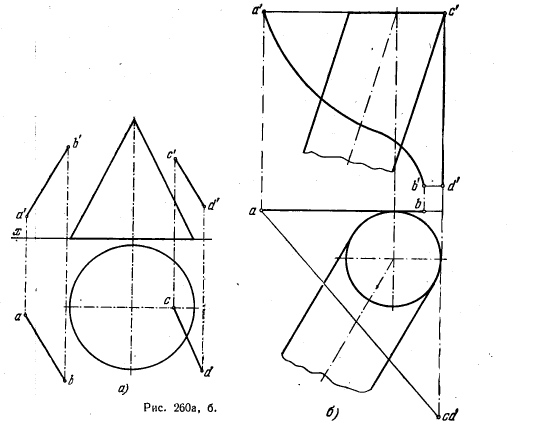
277. Построить проекции линии пересечения: а) конической поверхности с косой плоскостью, направляющими которой являются прямые АВ и CD, а плоскостью параллелизма — пл. H (рис. 260, а); б) коноида, направляющими которого являются кривая АВ и прямая CD, а плоскостью параллелизма — пл. H, с цилиндрической поверхностью (отверстие) (рис. 260, б).
278*. Построить проекций линии пересечения поверхности ко-нуса с поверхностью тора, ограничивающей отверстие в конусе (рис. 261, а).
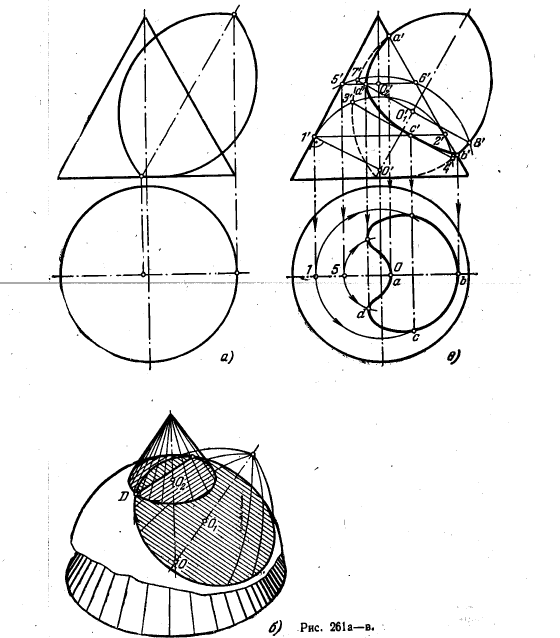
Решение. В данной задаче мы имеем случай взаимного пересечения двух поверхностей вращения, оси которых пересекаются и расположены в плоскости, параллельной пл. V. В подобных случаях наиболее простым является применение вспомогательных сфер, проводимых из точки пересечения осей обеих поверхностей (рис. 261,6). Эти сферы пересекают данные поверхности по окружностям, в пересечении которых получаются точки, общие для обеих поверхностей.
На рис. 261, в показано применение двух сфер. фронт. проекция одной из них проведена как окружность с центром О’ радиусом 0’5′. Отрезок 5’6′ является фронт. проекцией окружности, по которой сфера пересекает коническую поверхность, а отрезок 7’8’— фронт. проекцией окружности, по которой эта сфера пересекает поверхность тора. Получается точка d’ — фронт. проекция одной из гочек, общей для поверхности тора и конуса. По точке d’ находим на параллели конуса проекцию d и ей симметричную.
Сфера радиуса О’1′ лишь касается конической поверхности по окружности, но поверхность тора пересекает. Поэтому точка с’,-полученная с помощью этой сферы, имеет особое значение: если брать сферы с радиусом меньшим, чем O’1′, то общих точек для данный поверхностей мы с помощью таких сфер не получим. В точке с’ фронт. проекция линии пересечения лишь коснется прямой 3’4′, но ее не пересечет.
Положение точек а’ и b’ очевидно.
Радиусы вспомогательных сфер следует брать в данном случае в пределах от O’1′ до О’а’.
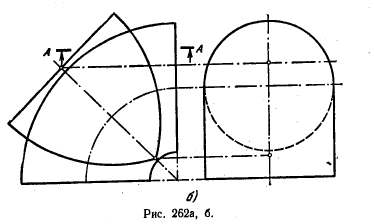
279* Построить проекции линии пересечения: а) поверхности вращения с поверхностью гиперболоида вращения (рис. 262, а); б) поверхностей двух торов (рис. 262, б), и в обоих случаях сеч. А—А.
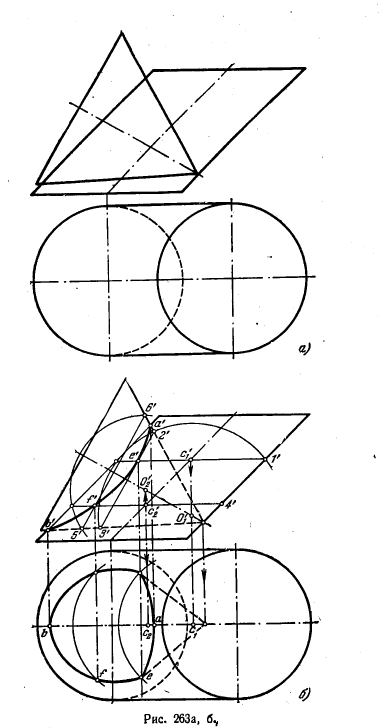
280*. Построить проекции линии пересечения цилиндрической поверхности с поверхностью конуса вращения, ограничивающей отверстие в цилиндре (рис. 263, а).
Решение. Из двух заданных поверхностей лишь одна поверхность вращения— коническая. Другая же поверхность не является поверхностью вращения. Это цилиндр, называемый наклонным круговым,— круговым, так как он имеет ряд круговых параллельных между собою сечений. В данном случае такие сечения параллельны пл. Н. Кроме того, имеется общая ддя конуса и цилиндра плоскость симметрии, параллельная пл. V.
Эти обстоятельства подсказывают использование вспомогательных сфер, но не с постоянным центром, как в задаче 278.
Действительно, круговое сечение цилиндра можно принять за параллель некоторой сферы. Например, окружность радиуса c’11′ (рис. 263, б) может быть параллелью многих сфер, центры которых располагаются на прямой, проведенной через с’1 перпендикулярно к плоскости параллели. Если же мы на этом перпендикуляре возьмем точку в пересечении с осью конуса, то такую точку (с фронт. проекцией О’1) можно принять за центр сферы с радиусом O’11′, пересекающей цилиндр по окружности радиуса с’11′, а конус вращения — по окружности с диаметром 2’3′. Отсюда мы полущем точки, фронт. проекции которых сливаются в одну точку e’ (одна из этих точек — на обращенной к нам части линии пересечения, другая — на ей симметричной).
На рис. 263, б дан еще один пример подобного построения. Задавшись на цилиндре окружностью радиуса c’24′, находим фронт. проекцию центра сферы в точке O’2 и радиус сферы, равный О’24′. При помощи этой сферы получены точки, общие для поверхностей конуса и цилиндра, с фронт. проекциями в точке f’.
Положение точек а’ и b’ очевидно.
Горизонт. проекции точек по найденным их фронт. проекциям строим на окружностях — горизонт. проекциях окружностей, взятых на поверхности цилиндра.
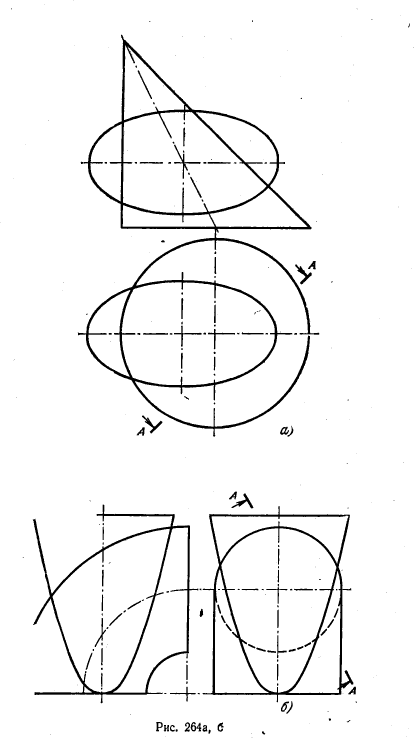
281. Построить проекции линии пересечения: а) конической поверхности с поверхностью эллипсоида вращения (рис. 264, а); б) поверхности тора с поверхностью параболоида вращения (рис. 264, б).
В обоих случаях построить сечения А—А.
Лекция 7. Поверхности
По вопросам репетиторства по начертательной геометрии, вы можете связаться любым удобным способом в разделе Контакты . Возможно очное и дистанционное обучение по Skype: 1250 р./ак.ч.
7.1. Поверхности. Образование и задание поверхности на чертеже
Поверхности составляют широкое многообразие объектов трехмерного пространства. Инженерная деятельность человека связана непосредственно с проектированием, конструированием и изготовлением различных поверхностей. Большинство задач прикладной геометрии сводится к автоматизации проектно-конструкторского процесса и воспроизведения сложных поверхностей. Способы формообразования и отображения поверхностей составляют основу инструментальной базы трехмерного моделирования современных систем автоматизированного проектирования.
Рассматривая поверхности как непрерывное множество точек, между координатами которых может быть установлена зависимость, определяемая уравнением вида F(x,y,z)=0, можно выделить алгебраические поверхности (F(x,y,z)— многочлен n-ой степени и трансцендентные (F(x,y,z)— трансцендентная функция.
Если алгебраическая поверхность описывается уравнением n-й степени, то поверхность считается поверхностью n-го порядка. Произвольно расположенная секущая плоскость пересекает поверхность по кривой того же порядка (иногда распадающейся или мнимой), какой имеет исследуемая поверхность. Порядок поверхности может быть определен также числом точек её пересечения с произвольной прямой, не принадлежащей целиком поверхности, считая все точки (действительные и мнимые).
Поверхность можно рассматривать, как совокупность последовательных положений l1,l2… линии l перемещающейся в пространстве по определенному закону (Рисунок 7.1). В процессе образования поверхности линия l может оставаться неизменной или менять свою форму — изгибаться или деформироваться. Для наглядности изображения поверхности на эпюре Монжа закон перемещения линии l целесообразно задавать графически в виде одной линии или целого семейства линий (m, n, p…).
Подвижную линию принято называть образующей (li), неподвижные – направляющими (m). Такой способ образования поверхности принято называть кинематическим .
Примером такого способа могут служить все технологические процессы обработки металлов режущей кромкой, когда поверхность изделия несёт на себе «отпечаток» режущей кромки резца, т.е. её поверхность можно рассматривать как множество линий конгруэнтных профилю резца.
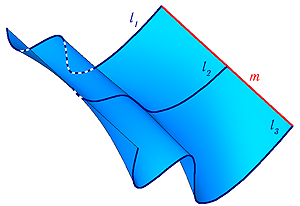
Рисунок 7.1 — Кинематическая поверхность
По виду образующей различают поверхности линейчатые и нелинейчатые , образующая первых – прямая линия, вторых – кривая.
Линейчатые поверхности в свою очередь разделяют на развертывающиеся , которые можно без складок и разрывов развернуть на плоскость и неразвертывающиеся .
Значительный класс поверхностей формируется движением окружности постоянного или переменного радиуса. Такие поверхности носят название циклические (Рисунок 7.2).
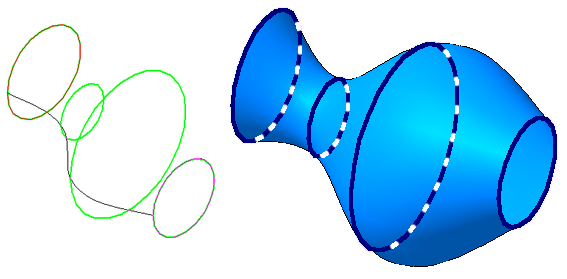
Рисунок 7.2 — Циклическая поверхность
Если группировать поверхности по закону движения образующей линии, то большинство встречающихся в технике поверхностей можно разделить на:
- поверхности вращения;
- винтовые поверхности;
- поверхности с плоскостью параллелизма;
- поверхности параллельного переноса.
Особое место занимают такие нелинейные поверхности, образование которых, не подчинено ни какому закону. Оптимальную форму таких поверхностей определяют теми физическими условиями, в которых они работают и устанавливают форму экспериментально (поверхности лопастей турбин, обшивка каркасов морских судов и самолетов).
Для графического изображения поверхности на чертеже используется её каркас.
Множество линий, заполняющих поверхность так, что через каждую точку поверхности проходит в общем случае одна линия этого множества, называется каркасом поверхности .
Поверхность может быть задана и конечным множеством точек, которое принято называть точечным каркасом .
Проекции каркаса могут быть построены, если задан определитель поверхности – совокупность условий, задающих поверхность в пространстве и на чертеже.
Различают две части определителя: геометрическую и алгоритмическую.
Геометрическая часть определителя представляет собой набор постоянных геометрических элементов (точек, прямых, плоскостей и т.п.), которые могут и не входить в состав поверхности.
Вторая часть – алгоритмическая (описательная) – содержит перечень операций, позволяющий реализовать переход от фигуры постоянных элементов к непрерывному каркасу.
Например, циклическая поверхность, каркас которой состоит из восьмиугольников (Рисунок 7.3), может быть задан следующим образом:
- Геометрическая часть определителя: три направляющих l, m, n.
- Алгоритмическая часть: выбираем плоскость α; находим точки А, В, С, в которых α пересекает соответственно направляющие l, m, n. Строим восьмиугольник, определяемый тремя найденными точками. Переходим к следующей плоскости и повторяем построение
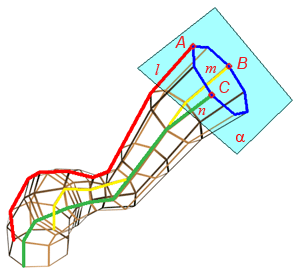
Рисунок 7.3 –Образование циклической поверхности
7.2. Поверхности вращения
Поверхностями вращения называются поверхности, полученные вращением образующей вокруг неподвижной оси (Рисунок 7.5).
Цилиндрическая и коническая поверхности бесконечны (т.к. бесконечны образующие); сферическая, торовая поверхности — конечны.
Сферическая поверхность – частный случай торовой поверхности. При вращении окружности вокруг осей б, в, г (Рисунок 7.4, а) получим торовую поверхность (Рисунок 7.4, б), а вокруг оси а – сферическую.
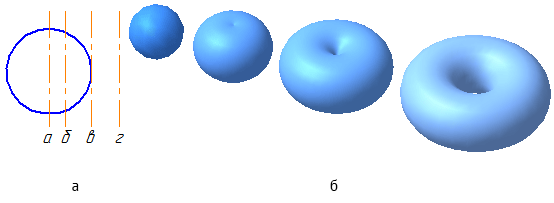
Рисунок 7.4 – Образование поверхностей вращения
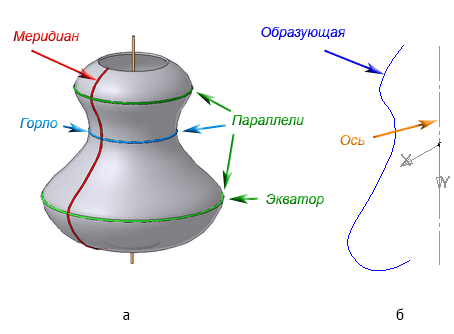
Рисунок 7.5 – Элементы поверхности вращения
Каждая точка образующей линии при вращении вокруг оси описывает окружность, которая располагается в плоскости, перпендикулярной оси вращения. Эти окружности называются параллелями (Рисунок 7.5).
Наименьшая параллель называется горлом , наибольшая – экватором .
Линия пересечения поверхности вращения плоскостью, проходящей через ось, называется меридианом .
Линия пересечения поверхности вращения плоскостью, проходящая через ось, параллельно фронтальной плоскости проекций, называется главным меридианом .
7.3. Цилиндрическая поверхность
Цилиндрическая поверхность образуется движением прямой линии, которая в любом своём положении параллельна данному направлению и пересекает криволинейную направляющую (Рисунок 7.6).
Цилиндр – геометрическое тело, ограниченное замкнутой цилиндрической поверхностью и двумя параллельными плоскостями, пересекающими все образующие данной поверхности.
Взаимно параллельные плоские фигуры, ограниченные цилиндрической поверхностью, называются основаниями цилиндра .
Если нормальное сечение (плоскость сечения перпендикулярна образующим) имеет форму окружности, то цилиндрическая поверхность называется круговой .
Если образующие цилиндрической поверхности перпендикулярны к основаниям, то цилиндр называется прямым, в противном случае – наклонным .
Рассмотрим проецирование прямого кругового цилиндра и принадлежащей ему точки F.
Условимся, что фронтальная проекция точки F – невидима (Рисунок 7.6).
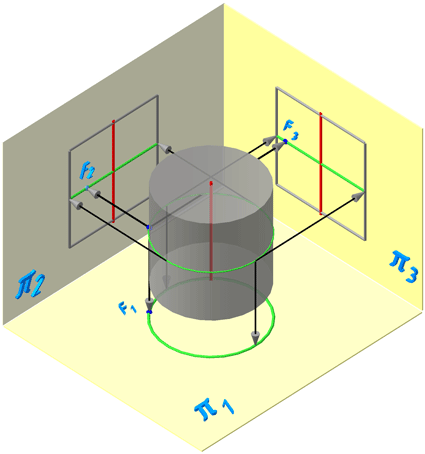
Рисунок 7.6 – Проецирование цилиндра на плоскости проекций
Горизонтальная и профильная проекции точки F будут видимы.
При определении видимости, образующие, которые находятся на части, обращённой к наблюдателю и обозначенной на π1 сплошной зелёной линией – на плоскости проекции π2 видны, а которые находятся на части, обозначенной толстой штриховой линией – видны на π3.
Пусть точка А на π2 видима (Рисунок 7.7). Тогда на π1 она будет видима, а на π3 невидима.
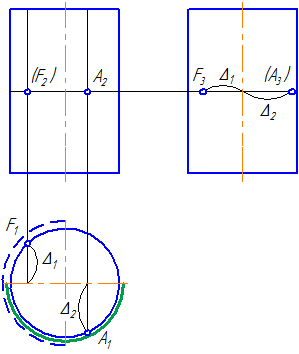
Рисунок 7.7 – Эпюр прямого кругового цилиндра и принадлежащих ему точек
7.4. Пересечение прямой с поверхностью прямого кругового цилиндра
Для построения точек пересечения прямой линии с поверхностью прямого кругового цилиндра не требуется дополнительных построений. На горизонтальной плоскости проекций точки пересечения (1 и 2) находятся сразу. Фронтальные проекции строим по линиям связи.
Но в общем случае, алгоритм решения рассмотрим на следующем упражнении.
Рисунок 7.8 – Пересечение прямой с поверхностью прямого кругового цилиндра
Упражнение
Заданы: прямой круговой цилиндр с осью вращения, перпендикулярной плоскости проекций π1 и прямая а общего положения (Рисунок 7.8).
Построить точки пересечения прямой а с поверхностью цилиндра.
Для построения точек пересечения прямой с поверхностью цилиндра необходимо:
- Заключить прямую во вспомогательную секущую плоскость частного положения σ (горизонтально-проецирующую).
- Построить фигуру пересечения поверхности цилиндра горизонтально-проецирующей плоскостью: результат пересечения — четырехугольник (на π2 условно заштрихован).
- Найти точки «входа» и «выхода» прямой: на пересечении её фронтальной проекции с фронтальными проекциями сторон четырёхугольника (они же — проекции образующей цилиндра);
Прямая а пересекается со сторонами сечения в двух точках – 1 и 2.
Определим видимость участков прямой: очевидно, что между точками 1-2 прямая невидима, а на плоскости проекций π2 будет ещё невидим участок прямой от точки 1 до левой крайней образующей.
7.5. Пересечение прямой с поверхностью наклонного цилиндра
Упражнение
Заданы : наклонный круговой цилиндр с осью вращения, наклонной к плоскости проекций π1 и прямая mобщего положения (Рисунок 7.9).
Построить точки пересечения прямой mс поверхностью цилиндра.
Решение :
Для построения точек пересечения прямой с поверхностью цилиндра необходимо:
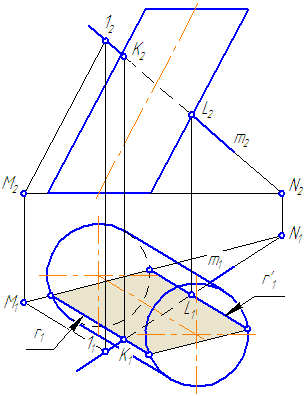
Рисунок 7.9 – Пересечение прямой с наклонным цилиндром
- Заключить прямую m во вспомогательную плоскость σ, дающую в сечении наиболее простую фигуру – четырехугольник (σ параллельна оси цилиндра или образующим). Эту плоскость зададим двумя пересекающимися прямыми m∩(1M);
- Построить горизонтальный след плоскости σ (прямую пересечения σ с плоскостью проекций π1) как проходящую через горизонтальные следы прямых m и (1M) (точки пересечения прямых с плоскостью проекций π1 (основания)) – (MN);
- Найти точки пересечения MN с окружностью основания цилиндра. Через эти точки провести образующие r, по которым плоскость σ пересекает боковую поверхность цилиндра:
На анимации ниже представлена последовательность построения точек пересечения прямой с наклонным цилиндром.
7.6. Сферическая поверхность
Сферическая поверхность – поверхность, образованная вращением окружности вокруг отрезка, являющегося её диаметром.
Шаром называется тело, ограниченное сферической поверхностью.
Экватор – это окружность, которая получается пересечением сферы горизонтальной плоскостью, проходящей через ее центр (Рисунок 7.10).
Меридиан – это окружность, которая получается пересечением сферы плоскостью, перпендикулярной плоскости экватора и проходящей через центр сферы.
Параллелями называются окружности, которые получаются пересечением сферы плоскостями, параллельными плоскости экватора.
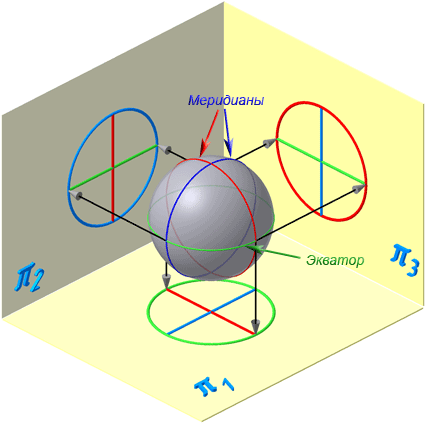
Рисунок 7.10 – Проецирование сферической поверхности
Прямоугольная проекция шара (сферы) на любую плоскость – есть окружность, которую часто называют очерковой .
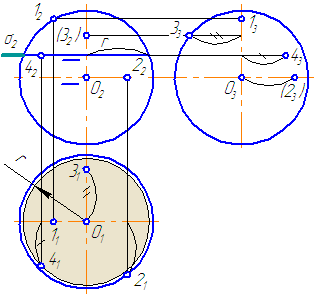
Рисунок 7.11 – Эпюр сферы и принадлежащих ей точек
Упражнение
Заданы: сферическая поверхность тремя проекциями (Рисунок 7.11) и фронтальные проекции точек 1, 2, 3, 4.
Необходимо построить горизонтальные и профильные проекции заданных точек.
- Проанализируем их расположение на поверхности сферы. Точки 1, 2, 3 лежат на очерковых образующих сферы.
- Точка 1 принадлежит главному меридиану (очерковой окружности на π2), проекция которого на π1 совпадает с проекцией горизонтальной оси, на π3 – с проекцией вертикальной оси.
- Недостающие проекции точки 1 находим посредством линий проекционной связи. Все проекции точки 1 видимы.
- Рассмотрим положение точки 2. Точка 2 принадлежит экватору (очерковой окружности на π1), проекции которого на π2 и π3 совпадают с проекцией горизонтальной оси. Горизонтальная проекция точки 2 строится посредством линии проекционной связи, для построения профильной проекции необходимо измерить расстояние, отмеченное дугой, и отложить его по линии связи от точки О3 вправо. Профильная проекция точки 2 невидима.
- Точка 3 принадлежит очерковой окружности на π3, которая также является меридианом, проекции которого на π2 и π1 совпадают с проекцией вертикальной оси. Профильная проекция точки строится посредством линии проекционной связи. Для построения горизонтальной проекции точки 3 необходимо расстояние, отмеченное на π3 двумя засечками, отложить на π1 вверх от точки О1. Горизонтальная и профильная проекции точки 3 видимы.
- Для построения проекций точки 4 необходимо ввести вспомогательную секущую плоскость (зададим плоскость σ//π1 и σ⊥π2). Плоскость σ пересекает поверхность сферы по окружности радиусом r. На π1 строим данное сечение и по линии проекционной связи находим 41. Для построения профильной проекции необходимо расстояние, отмеченное засечкой, отложить по линии проекционной связи на π3 вправо от оси. Все проекции точки 4 видимы.
7.7. Пересечение прямой с поверхностью сферы
Упражнение
Заданы: сфера и прямая общего положения АВ.
Найти: точки пересечения прямой с поверхностью сферы (точки «входа» и «выхода»).
Чтобы найти точки пересечения прямой с поверхностью сферы необходимо:
- Заключить прямую во вспомогательную плоскость, пересекающую поверхность сферы так, чтобы получались простые фигуры (например, круг, ограниченный окружностью);
- Построить фигуру пересечения сферы вспомогательной плоскостью;
- Найти общие точки прямой и контура фигуры (окружность): так как прямая и окружность лежат в одной плоскости, то они, пересекаясь, образуют точки, общие для прямой и сферы, которые и будут являться искомыми точками (Рисунок 7.12).
- Через прямую проводим плоскость σ. Пусть σ⊥π1 и пересекает сферу по окружности радиусом r. С – центр окружности сечения ОС⊥σ:
Рисунок 7.12 – Пересечение прямой с поверхностью сферы
- Введём π3⊥π1 и π3//σ1. Построим проекцию окружности сечения на π3 и проекцию А3В3.
- Находим точки их пересечения 12 и 23.
- Определим видимость участков прямой.
- На π1 точки 1 и 2 находятся на переднем полушарии, следовательно, на π2 они видимы.
7.8. Коническая поверхность
Коническая поверхность образуется движением прямой линии (образующей), которая в любом своем положении проходит через неподвижную точку и пересекает криволинейную направляющую (имеет две полости).
Тело, ограниченное замкнутой конической поверхностью вершиной и плоскостью, называется конусом .
Плоская фигура, ограниченная конической поверхностью, называется основанием конуса .
Часть конической поверхности, ограниченная вершиной и основанием, называется боковой поверхностью конуса .
Если основание конуса является кругом, то конус называется круговым .
Если вершина конуса расположена на перпендикуляре к основанию, восстановленному из его центра, то конус называется прямым круговым .
Перемещая точку A» — можно изменять диаметр основания конуса; перемещая точку O’ — можно менять положение точки на поверхности конуса.
Рисунок 7.13 – Принадлежность точки конической поверхности
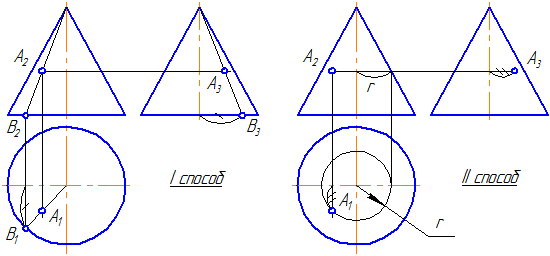
Рассмотрим вопрос принадлежности точки А поверхности конуса.
Дана фронтальная проекция точки А и она видима (Рисунок 7.13).
1 способ . Для построения ортогональных проекций точки, расположенной на поверхности конуса, построим проекции образующей, проходящей через данную точку. При таком положении точки А все её проекции – видимы.
2 способ . Точка А лежит на параллели конуса радиусом r. На π1 строим проекцию окружности (параллели) и по линии проекционной связи находим А1. По двум проекциям точки строим третью.
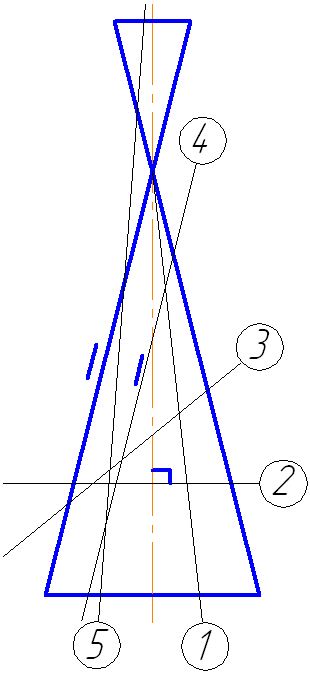
7.9. Пересечение прямой с поверхностью конуса
Пусть задан прямой круговой конус и прямая общего положения m (Рисунок 7.14). Найти точки «входа» и «выхода» прямой с поверхностью конуса.
- Через прямую m проводим вспомогательную секущую плоскость σ, дающую в сечении наиболее простую фигуру.
- Применение в качестве вспомогательной секущей плоскости проецирующей плоскости в данном случае нецелесообразно, так как в сечении получится кривая второго порядка, которую нужно строить по точкам.
Наиболее простая фигура – треугольник. Для этого секущая плоскость σ должна пройти через вершину S. Плоскость зададим с помощью двух пересекающихся прямых σ=SM∩MN или, что, то же самое, (σ=SM∩m).
- Возьмем на прямой m точку А и соединим её с вершиной. Прямая SA пересечёт плоскость основания в точке М.
- Построим горизонтальные проекции этих объектов.
- Продлим фронтальную проекцию прямой m до пересечения с плоскостью основания в точке N.
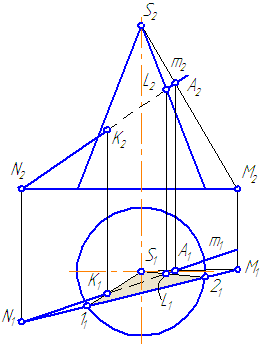
Рисунок 7.14 – Построение точек пересечения прямой с поверхностью конуса
- Построим её горизонтальную проекцию.
- Соединим точки M1N1, на пересечении с окружностью основания получим точки 1 и 2.
- Строим треугольник сечения конуса плоскостью σ, соединив точки 1 и 2 с вершиной S.
- На пересечении образующих 1-S и 2-S с прямой m получим искомые точки K и L.
- Определим видимость прямой относительно поверхности конуса.
На анимации ниже представлена последовательность построения точек пересечения прямой с поверхностью конуса.
7.10. Пересечение цилиндра плоскостью
Пусть плоскость сечения γ – фронтально-проецирующая (Рисунок 7.15).
- Если плоскость сечения γ параллельна оси цилиндра, то она пересекает цилиндр по четырехугольнику.
- Если плоскость сечения γ перпендикулярна оси цилиндра, то она пересекает цилиндр по окружности.
- Если плоскость сечения γ не параллельна и не перпендикулярна оси цилиндра в сечении эллипс.
Рассмотрим алгоритм построения сечения – эллипс (Рисунок 7.15):
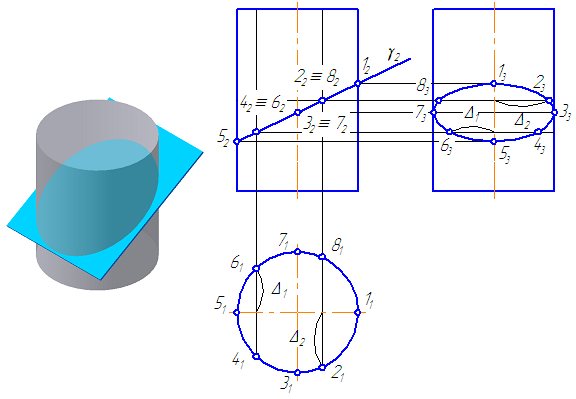
Рисунок 7.15 – пересечение цилиндра плоскостью
- Находим и строим характерные точки (точки, не требующие дополнительных построений) – в нашем случае, точки принадлежащие крайним образующим – 1, 3, 5, 7. Одновременно с этим, данные точки определяют величину большой и малой оси эллипса.
- Для построения участка эллипса необходимо построить не менее 5-ти точек (так как лекальная кривая второго порядка определяется как минимум пятью точками). Для построения точек 2, 4, 6, 8 возьмем на π1 произвольно расположенные образующие цилиндра, которые проецируются на данную плоскость проекции в точки.
- Построим вторые проекции данных образующих. Из точек пересечения вторых проекций образующих с проекцией плоскости сечения γ проводим линии связи к π3. Для построения третьей проекции, например, точки 6 измеряем расстояние Δ1 и откладываем его по соответствующей линии связи на π3. Симметрично ей, относительно оси вращения, строим точку 4. Аналогично строятся другие точки.
7.11. Пересечение сферы плоскостью
Плоскость пересекает поверхность сферы всегда по окружности. Задачу пересечения плоскости со сферой мы рассматривали при решении задачи построения точек пересечения прямой с поверхностью сферы (см. выше).
7.12. Пересечение конуса плоскостью
Рассмотрим пять возможных вариантов расположения плоскости относительно поверхности прямого кругового конуса. Пусть плоскость сечения перпендикулярна плоскости проекций π2 (Рисунок 7.16).
- Если плоскость проходит через вершину (1) – в сечении две образующие и прямая пересечения с плоскостью основания.
- Если плоскость перпендикулярна оси вращения конуса (2) – в сечении окружность.
- Если плоскость не параллельна ни одной образующей (пересекает все образующие (3)) – в сечении эллипс.
- Если плоскость параллельна одной образующей конуса – в сечении парабола (на примере – плоскость сечения (4) параллельна крайней образующей конуса).
- Если плоскость параллельна двум образующим (пересекает обе полости конической поверхности (5)) – в сечении гипербола (рисунок 7.17).
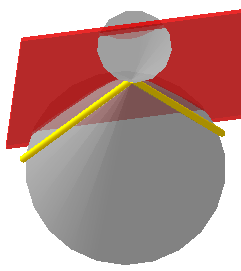
Рисунок 7.17. Плоскость сечения параллельна двум образующим конуса
Ниже, на моделях, представлены варианты положения секущей плоскости относительно поверхности конуса, при которых получаются сечения в виде эллипса, параболы и гиперболы.
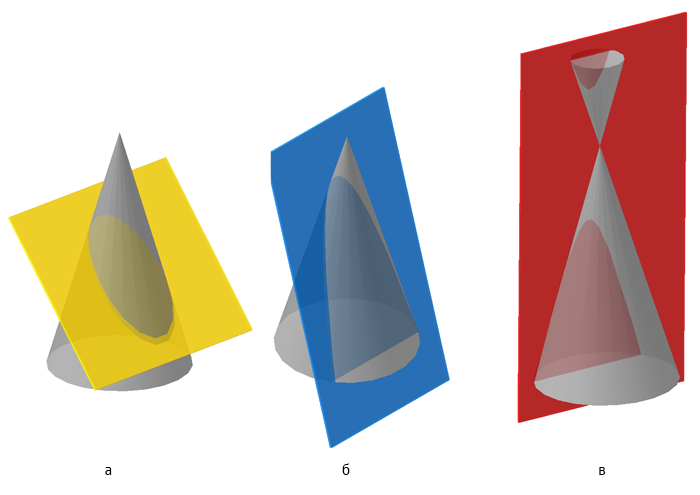
Рисунок 7.18 – Сечение конической поверхности плоскостью (а — эллипс, б — парабола, в — гипербола)
Рассмотрим пример построения сечения конической поверхности плоскостью.
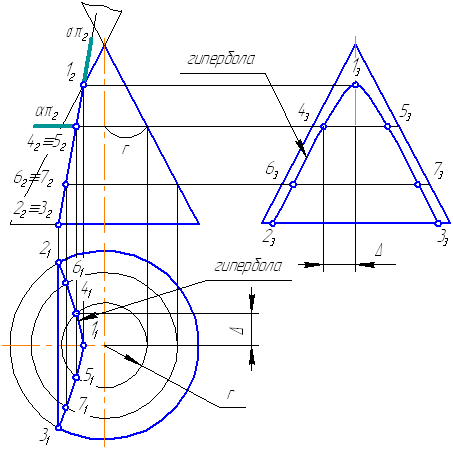
Рисунок 7.19 – Построение пересечения конической поверхности плоскостью
Пусть задана секущая проецирующая плоскость σ⊥π2 (Рисунок 7.19). Если продлить коническую поверхность и проекцию плоскости, то видно, что плоскость пересекает вторую ветвь конической поверхности, следовательно, в сечении получится гипербола.
- Построим характерные точки. Это точки, лежащие на крайних образующих и на окружности основания конуса (1, 2, 3). Их проекции строятся по линиям проекционной связи.
- Для построения промежуточных точек, воспользуемся методом вспомогательных секущих плоскостей. Введём плоскость α⊥π2 и перпендикулярно оси вращения, что даст в сечении окружность радиусом r. Строим эту окружность на π1. Плоскость α пересекает и заданную плоскость сечения по прямой, проекции которой на π1 и π3 совпадают с линиями проекционной связи.
- На пересечении этих двух сечений на плоскости проекций π1 строим точки 4, 5. Профильные проекции этих точек строим по линии проекционной связи, откладывая расстояние от оси вращения конуса, равное Δ.
- Аналогично строим точки 6, 7. Плавно соединим построенные точки, образуя гиперболу.
- Обведём то, что осталось от конуса после такого среза с определением видимости. В нашем примере все проекции построенной кривой будут видимы.
На анимации ниже представлена последовательность построения пересечения конической поверхности плоскостью.
7.13. Задачи для самостоятельной работы
1. Достроить проекции сферы с заданным вырезом (Рисунок 7.20).
Рисунок 7.20
2-3. Построить три проекции конуса с призматическим отверстием (Рисунки 7.21, 7.22).
Рисунок 7.21
Рисунок 7.22
4. Построить точки «входа» и «выхода» прямой при пересечении её с поверхностью полусферы (Рисунок 7.23).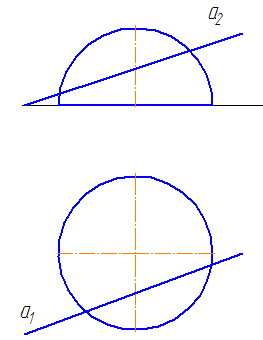
Рисунок 7.23
По вопросам репетиторства по начертательной геометрии, вы можете связаться любым удобным способом в разделе Контакты . Возможно очное и дистанционное обучение по Skype: 1250 р./ак.ч.
- Главная ›
- Начертательная геометрия ›
- Лекции ›
- Лекция 7. Поверхности
Пересечение поверхнолстей
3. Опорные точки. Отметим плоскости, в которых лежат опорные точки линии пересечения. а) α – общая плоскость симметрии заданных поверхностей, в ней лежат самая верхняя (М) и самая нижняя (N) точки линии пересечения (отмечаем их горизонтальные проекции М 1 и N 1 ). б) β – плоскость главного фронтального меридиана цилиндра. В этой плоскости лежат точки C и D, которые являются соответственно самой левой и самой правой точкой линии пересечения (отмечаем их горизонтальные проекции C 1 и D 1 ). Так как плоскость β является границей видимости на π 2 цилиндра, следовательно точки С и D будут точками изменения видимости на π 2 по цилиндру. в) γ – плоскость главного профильного меридиана цилиндра. В этой плоскости лежат точки Е и F, которые являются соответственно самой дальней и самой ближней точками линии пересечения. г) σ – плоскость главного фронтального меридиана сферы. В этой плоскости лежат точки А и В (точки изменения видимости на π 2 по сфере). 4. Промежуточные точки. Для более точного построения проекции линии пересечения зададим промежуточные точки 1 и 2. Имея достаточное количество проекций точек линии пересечения на π 1 , определим их фронтальные проекции по принадлежности сфере. Как известно, точка принадлежит поверхности, если она принадлежит линии, лежащей на этой поверхности. В качестве таких линий на поверхности сферы удобно брать окружности, параллельные какой-либо плоскости проекций. Окружности, на которых лежат искомые точки, выберем параллельно π 2. Тогда на π 1 эти окружности проецируются в отрезки, параллельные оси х 12 . На плоскость π 2 они проецируются в натуральную величину – окружности. Радиус каждой окружности замеряем на π 1 (он равен расстоянию от оси до очерка сферы). Строим на плоскости π 2 проекции окружностей в натуральную величину. По линиям связи определяем фронтальные проекции искомых точек. На рисунке 6 показано построение фронтальной проекции точки 2. 5. Видимость линии пересечения. Общей границей видимости линии пересечения на π 2 является плоскость главного фронтального меридиана цилиндра (β 1 ), поэтому участок линии пересечения, проходящий через точки C, A, M, E, 1, B, D на π 2 не виден и изображается на чертеже штриховой линией. 6. Видимость очерков поверхностей. Так как главный фронтальный меридиан цилиндра находится перед главным фронтальным меридианом сферы, то на π 2 фронтальный очерк цилиндра обводим толстой линией до проекций точек C 2 и D 2 . Фронтальный очерк сферы между проекциями точек А 2 и В 2 обводим тонкой линией, это означает, что 12
данный участок фронтального меридиана сферы находится внутри цилиндра (растворяется). За точками А 2 и В 2 часть меридиана сферы, закрытую меридианом цилиндра, изображаем штриховой линией. 3 Способ вспомогательных секущих плоскостей Способ вспомогательных секущих плоскостей применяют в том слу- чае, если секущие плоскости пересекают заданные поверхности по графически простым линиям (прямым или окружностям). Пример. Построить проекции линии пересечения двух поверхностей. 1. Анализ условия. Пересекаются две поверхности: прямой круговой конус Φ и сфера Ψ (рисунок 7). Обе поверхности занимают общее положение. Ось вращения конуса перпендикулярна горизонтальной плоскости проекций (i π 1 ). 2. Способ решения задачи. Для построения линии пересечения данных поверхностей выбираем спо- соб вспомогательных секущих плоскостей . Секущие плоскости (φ 1 , β, φ 2 ), параллельные π 1 , будут пересекать обе поверхности по окружностям. 3. Опорные точки. Отмечаем плоскости, в которых лежат опорные точки: α – фронтальная плоскость уров- ня. Она является общей плоскостью симметрии данных поверхностей и одновременно – общей границей видимости на π 2 и общей плоскостью главных фронтальных меридианов сферы и конуса. β – горизонтальная плоскость уровня (плоскость экватора сферы) является границей видимости сферы на π 1 . Для нахождения опорных точек, лежащих в плоскости α, пересекаем обе поверхности указанной плоскостью. Плоскость α пересекает конус Φ по двум
| образующим, которые являются фрон- | |
| тальным очерком конуса. Сферу Ψ | |
| плоскость α пересекает по главному | |
| фронтальному меридиану, то есть по | |
| окружности, которая является фрон- | |
| тальным очерком сферы . | Рисунок 7 |
| 13 |
В пересечении фронтальных очерков сферы и конуса отмечаем проекции точек А 2 и В 2 (А — самая верхняя, В – самая нижняя точки линии пересечения). Горизонтальные проекции точек А и В определяем по линиям связи в плоскости α. Для определения точек изменения видимости линии пересечения на π 1 , пересекаем заданные поверхности плоскостью β. Плоскость β пересекает конус Φ по окружности радиуса R, а сферу Ψ – по окружности, являющейся экватором. В пересечении горизонтальных проекций получившихся линий отмечаем проекции точек С и D. Фронтальные проекции этих точек находим по линиям связи в плоскости β. 4. Промежуточные точки. Промежуточные точки линии пересечения находятся на участке между точками А и В. В этом промежутке вводим вспомогательные секущие плоско- сти φ (φ 1 , φ 2 ). На рисунке 8 дан пример построения промежуточных точек 1 и 1′. Для их нахождения вводим вспомогательную секущую плоскость φ 1 . Эта плоскость пересекает конус по окружности радиуса r . Эта же плоскость пересекает сферу по окружности радиуса r’ . Строим горизонтальные проекции указанных окружностей, которые проецируются на π 1 в натуральную величину. Отмечаем точки пересечения окружностей 1 1 и 1′ 1 . Это и будут горизонтальные проекции искомых точек. Фронтальные проекции 1 2 и 1′ 2 находим по линиям связи в плоскости φ 1 . Алгоритм построения точек 1 и 1’можно записать следующим образом: 1) вводим φ 1 ║π 1 ; 2) φ 1 ∩ Φ = окр. r 3) φ 1 ∩ Ψ = окр. r’ 4) окр. r ∩ окр. r’ = <1; 1'>5) вводим φ 2 ║φ 1 и повторяем пункты 1…4. Количество секущих плоскостей зависит от расстояния между точками А и В. Расстояние между секущими плоскостями рекомендуется брать в пределах 7…10 мм. 5. Видимость линии пересечения. Общей границей видимости на π 1 является плоскость β – плоскость экватора сферы, поэтому участок линии пересечения ниже точек С и D на π 1 не виден и изображается штриховой линией. Общей границей видимости на π 2 является плоскость α. Линия пересечения симметрична относительно плоскости α, поэтому на π 2 видимая часть линии пересечения закрывает невидимую. Точки невидимые на π 2 взяты в скобки. 6. Видимость очерков. Очерком конуса на π 1 является его основание. Основание конуса находится ниже плоскости β (общей границы видимости на π 1 ), поэтому на π 1 изображается штриховой линией. 14
Очерком сферы на π 1 является её экватор. Экватор сферы лежит в плоскости β, следовательно, на π 1 он будет виден. Часть экватора между точками С и D (справа) обводится тонкой линией, так как растворяется внутри конуса. Рисунок 8 4 Способ вспомогательных секущих сфер Как уже отмечалось выше, в качестве вспомогательных секущих поверхностей могут использоваться сферы . 15
Почему именно сферы выбрали в качестве поверхностей-посредников? Чтобы ответить на этот вопрос рассмотрим частный случай пересечения поверхностей вращения — пересечение соосных поверхностей. 4.1 Соосные поверхности и построение линии пересечения соосных поверхностей Соосными называются две поверхности вращения, имеющие общую ось вращения. Например, соосными являются цилиндр и конус на рисунке 9. Рисунок 9 Теорема о пересечении соосных поверхностей: Две соосные поверхности вращения пересекаются по окружностям, число которых равно числу точек пересечения полумеридианов поверхностей. Плоскости окружностей перпендикулярны к общей оси вращения. На рисунке 9 цилиндр и конус пересекаются по окружности n (n 2 ). Плоскость этой окружности α перпендикулярна общей оси вращения i и проходит через точку 1 – точку пересечения полумеридианов заданных поверхностей. Если центр сферы лежит на оси какой-либо поверхности вращения, то сфера соосна с этой поверхностью и пересекает ее по окружности. На рисунке 10 приведены примеры сфер соосных с разными поверхностями вращения и построены проекции окружностей, по которым сферы пересекают эти поверхности. Рисунок 10 16
Свойство сфер пересекать соосные с ними поверхности вращения по окружностям и положено в основу способа вспомогательных секущих сфер. 4.2 Способ сфер-посредников Как уже отмечалось выше, линия пересечения двух поверхностей представляет собой пространственную кривую. Чтобы построить эту кривую нужно построить множество точек, одновременно принадлежащих каждой из пересекающихся поверхностей. Порядок нахождения общих точек с помощью вспомогательной секущей сферы рассмотрим на примере. Пусть пересекаются две поверхности вращения: прямой круговой конус Φ и прямой круговой цилиндр Ψ (рисунок 11). Оси вращения заданных поверхностей лежат в одной плоскости и пересекаются в точке О (і ∩ j = О). Рисунок 11 Алгоритм решения задачи на определение общих точек линии пересечения поверхностей. 1. Вводим вспомогательную секущую сферу с центром в точке О. Центр сферы точка О совпадает с точкой пересечения осей вращения (і ∩ j = О). В этом случае сфера будет соосна с каждой из заданных поверхностей. 2. Строим линию пересечения сферы с конусом. Это будет окружность m. 3. Строим линию пересечения сферы с цилиндром. Это будет окружность n. 4. Находим точки пересечения двух окружностей – точки А и В. Это и будет первая пара искомых точек. m ∩ n = < A; B >17
Если в той же точке О, как в центре, построить еще одну сферу и повторить пункты 2, 3 и 4, то получим другие точки искомой линии пересечения. Условия выбора способа сфер Вспомогательные секущие сферы можно применить только при одновременном выполнении следующих условий: 1) пересекающиеся поверхности должны быть поверхностями вращения; 2) заданные поверхности должны иметь общую плоскость симметрии, параллельную какой-либо плоскости проекций; 3) каждая из поверхностей должна содержать семейство окружностей, по которым сферы будут пересекать эти поверхности; а) если оси заданных поверхностей пересекаются (i ∩ j = O), выбирают способ концентрических сфер б) если оси заданных поверхностей скрещиваются, выбирают способ эксцентрических сфер 4.3 Способ концентрических сфер Пример. Построить линию пересечения двух поверхностей (рисунок 12). 1. Анализ условия. Пересекаются два прямых круговых конуса. Обозначим конус с осью вращения i π 1 буквой Ψ, а конус с осью j π 3 буквой Φ. Обе поверхности общего вида. 2. Способ решения задачи. Для построения линии пересечения применяем способ концентрических сфер , так как выполняются все необходимые условия: • обе поверхности – поверхности вращения; • имеется общая плоскость симметрии α, параллельная одной из плоскостей проекций (α ║ π 2 ); • каждая из поверхностей несет на себе семейство окружностей (на поверхности Ψ окружности і, на поверхности Φ окружности ј); • оси поверхностей пересекаются (i ∩ j = О). 3. Опорные точки. Прежде всего, отмечаем плоскости, в которых лежат опорные точки кривой пересечения. α – фронтальная плоскость уровня. Она является общей плоскостью симметрии и общей границей видимости на π 2 для заданных поверхностей. 18
β – горизонтальная плоскость уровня (граница видимости на π 1 конуса Φ и одновременно общая граница видимости линии пересечения на π 1 ). Теперь находим опорные точки, лежащие в этих плоскостях. Общая плоскость симметрии α пересекает обе поверхности по образующим, которые являются очерковыми данных конусов на π 2 . В пересечении этих образующих отмечаем проекции точек А 2 и В 2 (точка А – самая верхняя точка кривой пересечения, точка В – самая нижняя). Рисунок 12 19
Так как плоскость α является еще и общей границей видимости двух поверхностей на π 2 , то точки А и В – это еще и точки изменения видимости кривой пересечения на π 2 . Точки изменения видимости на π 1 найдем с помощью плоскости β. а) плоскость β пересекает поверхность Ψ по окружности k (r – радиус окружности k) β ∩ Ψ = окр.k б) плоскость β пересекает поверхность Φ по двум образующим, которые являются очерковыми конуса Φ на π 1 β ∩ Φ = две образующие ( а;b ); в) при пересечении окружности k и образующих а и b получаем точки С и D, которые и будут точками изменения видимости кривой пересечения на π 1 ; k ∩ a = C k ∩ b = D Для построения остальных точек применяем способ концентрических сфер (рисунок 13). За центр сфер принимаем точку О – точку пересечения осей i и j (i ∩ j = О) Чтобы избежать лишних построений, необходимо определить размеры радиусов наименьшей и наибольшей сфер, пригодных для решения задачи. Радиус максимальной сферы (R max ) определяем как расстояние от точки О до наиболее удаленной точки пересечения фронтальных меридианов (очерковых образующих) заданных поверхностей. О 2 А 2 < О 2 В 2 =>R max = О 2 В 2 Радиус минимальной сферы (R min ) равен наибольшему из расстояний от точки О до очерковых образующих пересекающихся поверхностей. Для нахождения R min из проекции точки О (О 2 ) проводим два перпендикуляра к очерковым образующим поверхностей. O 2 M 2 > O 2 N 2 => R min = O 2 M 2 Таким образом, сфера минимального радиуса должна быть вписана в одну поверхность, а другую пересекать. Нахождение первой пары точек с помощью минимальной сферы а) вводим сферу радиусом R min ; б) сфера R min пересекает поверхность Ψ по окружности m (m 2 ); в) сфера R min пересекает поверхность Φ по окружности n (n 2 ); г) отмечаем точки пересечения полученных окружностей m ∩ n = <1;1'>Точки 1 и 1′ будут самыми правыми точками искомой линии пересечения. 20
Научная электронная библиотека


Построение линии пересечения поверхностей осуществляется при помощи вспомогательных секущих плоскостей, которые, пересекая поверхности, дают возможность определить точки линии пересечения поверхностей, которые, в рассматриваемом случае, принадлежат одной и той же вспомогательной плоскости и пересекающимся поверхностям (рис. 8.18).
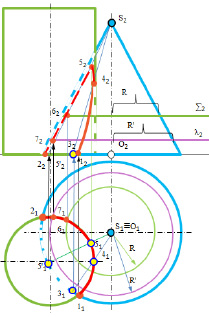
Рис. 8.18. Пример построения линии пересечения поверхностей конуса
и цилиндра с помощью вспомогательных секущих плоскостей:
а – алгоритм построения; б – пример возможного результата построения
При построении линии пересечения наиболее характерны два случая:
— одна из проекций линии пересечения известна и задача сводится к отысканию недостающих проекций точек по принадлежности одной из поверхностей;
— проекции линии пересечения не известны.
И в том и другом случае задача решается введением дополнительных секущих поверхностей, позволяющих находить точки, принадлежащие одновременно нескольким геометрическим объектам. В качестве дополнительных поверхностей могут использоваться плоскости, цилиндры и сферы, дающие наиболее простые (заранее известные) линии при пересечении с заданными поверхностями.
Если в качестве вспомогательных секущих поверхностей используются плоскости, то способ построения называют способом вспомогательных плоскостей.
Если используются сферы − способом вспомогательных сфер.
Рассмотрим применение вспомогательных секущих плоскостей на примере построения линии пересечения цилиндра с конусом вращения (рис. 8.18).
Для построения линии пересечения заданных поверхностей удобно в качестве вспомогательных поверхностей использовать серию горизонтальных плоскостей, перпендикулярных оси конуса, которые пересекают цилиндр и конус по окружностям. На пересечении этих окружностей находят точки искомой линии пересечения.
Известно, что если ось поверхности вращения проходит через центр сферы и сфера пересекает эту поверхность, то линия пересечения сферы и поверхности вращения − окружность, плоскость которой перпендикулярна оси поверхности вращения. При этом, если ось поверхности вращения параллельна плоскости проекций, то линия пересечения на эту плоскость проецируется в отрезок прямой линии. Это свойство используют для построения линии взаимного пересечения двух поверхностей вращения с помощью вспомогательных сфер. При этом могут быть использованы концентрические и эксцентрические сферы. Рассмотрим применение вспомогательных концентрических сфер − сфер с постоянным центром (рис. 8.19).
Способ секущих сфер с постоянным центром для построения линии пересечения двух поверхностей применяют при следующих условиях:
— обе линии пересекающиеся поверхности − поверхности вращения;
— оси поверхностей вращения пересекаются;
— точку пересечения принимают за центр вспомогательных (концентрических) сфер;
— плоскость, образованная осями поверхностей (плоскость симметрии), должна быть параллельна плоскости проекций.
В случае, если это условие не соблюдается, то, чтобы его обеспечить, прибегают к способам преобразования чертежа.

Рис. 8.19. Пример построения линии пересечения поверхностей конусов
с помощью концентрических сфер:
а) алгоритм построения; б) пример возможного результата построения
Такие сферы применяют, если:
— одна из пересекающихся поверхностей – поверхность вращения, другая поверхность имеет круговые сечения;
— две поверхности имеют общую плоскость симметрии (т. е. ось поверхности вращения и центры круговых сечений второй поверхности принадлежат одной плоскости – плоскости их симметрии).
Плоскость симметрии параллельна плоскости проекций (это условие при необходимости может быть обеспечено преобразованием чертежа). В этом случае окружности, по которым вспомогательные сферы пересекают поверхности, будут проецироваться на плоскость проекций в виде отрезков прямых. Для правильного использования метода вспомогательных секущих концентрических сфер рассмотрим задачу о пересечении двух конусов, оси которых пересекаются и параллельны П2.
В таком случае центром концентрических сфер, которые будут обеспечивать дополнительные построения, необходимые для решения задачи, принимается точка пересечения осей конусов.
Для решения задачи можно воспользоваться помощью вспомогательных сфер. Каждая из вспомогательных сфер может иметь по две пары отрезков параллельных основаниям конусов (за исключением применения минимального радиуса). Пересечение отрезков, принадлежащих разным конусам, даёт точки, принадлежащие линии пересечения поверхностей. Рассмотрим задачу, приведённую на рис. 8.19.
Фронтальные проекции 12, 22, 32, 42 точек находятся на пересечении фронтальных проекций очерков конусов. Их горизонтальные проекции 11, 21, 31, 41 находятся на горизонтальных проекциях осей конусов. Так как точки 3, 4 находятся на нижней очерковой линии, горизонтально расположенного конуса, их горизонтальные проекции – невидимые, а точки 1 и 2 – видимые. Для нахождения промежуточных точек линии пересечения поверхностей можно использовать концентрические сферы. Пересечение осей конусов даёт точку центра О2 концентрических сфер. Если из центра О2провести радиусом Rmin сферу, то в сечении конуса образуется окружность R1 (зеленого цвета).
На этой окружности образуются две пары промежуточных конкурирующих точек линии сечения 7 – 7’ и 8 – 8’, горизонтальные проекции которых находятся в проекционной связи с их фронтальными. Ещё две пары точек, искомой линии сечения, получаются аналогично рассмотренным (7 – 7’ и 8 – 8’) при использовании ещё одной концентрической сферы (синего цвета). В рассматриваемом примере линия пересечения конусов на фронтальной плоскости проекций П2 распалась на две видимые части относительно вертикальной осевой линии (127242, и 228232), а на горизонтальной плоскости проекций П1 эти части видны частично.
Точками смены видимости линии пересечения являются точки 9 и 10, которые находятся на образующих горизонтального конуса. На фронтальной плоскости проекции этих точек 92 – 9’2и 102 – 10 ‘2 расположены на оси. Горизонтальные проекции этих точек расположены на образующих горизонтально расположенного конуса и являются точками смены видимости на горизонтальной проекции линии пересечения двух рассматриваемых конусов.
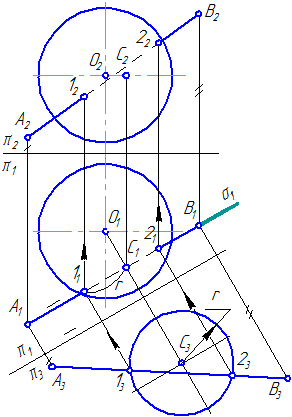
Рассмотрим построение линии пересечения прямого кругового конуса и тора, оси которых скрещиваются с помощью эксцентрических сфер (рис. 8.20).
Ось конуса параллельна плоскости П2, ось тора перпендикулярна плоскости П2, окружность центров осевых круговых сечений тора и ось конуса лежат в одной плоскости, параллельной плоскости П2. Две очевидные характерные точки: высшая с проекцией а2 и низшая d2 – являются точками пересечения проекций очерков тора и конуса. Для построения проекций промежуточных точек, например проекции b2, выполняют следующие построения: выбирают на поверхности тора окружность, например с проекцией 12 22 с центром в точке с проекцией 32.
Перпендикуляр к плоскости этой окружности из точки с проекцией 32 является линией центров множества сфер, которые пересекают тор по окружности с проекцией 12 22. Из множества этих сфер выбирают сферу с центром на оси конуса. Его проекция О1. Эта сфера радиусом R1 пересекает конус по окружности с проекцией 42 52. Пересечение проекций 12 22 и 42 52 является проекцией пары общих точек тора и конуса, т.е. линии их пересечения. На чертеже обозначена проекция b2 одной из указанных точек – точки на видимом участке линии пересечения.
Построение проекций второй пары точек линии пересечения, из которых обозначена проекция c2, выполнено с помощью отрезка 62 72 − проекции окружности на поверхности тора. Вспомогательная сфера для построения проекции c2 − сфера радиусом R2 с центром, проекция которого О2. Конус эта сфера пересекает по окружности с проекцией 82 92. В пересечении проекций 62 72 и 82 92 окружностей находим проекцию c2 искомой точки и симметричной ей на невидимой части пересекающихся поверхностей.
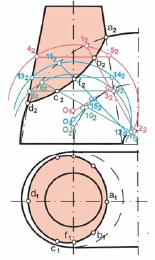
Рис. 8.20. Пример построения линии пересечения поверхностей конуса и тора
с помощью эксцентрических сфер:
а) алгоритм построения; б) пример возможного результата построения
Вопросы для самоконтроля
1) От каких параметров поверхности и плоскости зависит форма линии пересечения поверхности с плоскостью?
2) Каков алгоритм (порядок) определения линии пересечения поверхности плоскостью?
3) Какое положение плоскости пересечения по отношению к поверхности является предпочтительным для определения линии пересечения?
4) Какой способ построения линии пересечения называется способом вспомогательных сфер?
5) В каком случае при определении линии пересечения применяются концентрические (эксцентрические) сферы?
6) Какой способ построения линии пересечения необходимо применить, если две поверхности имеют общую плоскость симметрии?
7) Приведите пример определения линии пересечения поверхностей с помощью эксцентрических сфер.