2.4. Асинхронный исполнительный двигатель
Асинхронные исполнительные двигатели применяются в устройствах автоматики и предназначены для преобразования электрических сигналов в механическое перемещение.
На статоре этого двигателя имеются две обмотки: обмотка возбуждения, постоянно включенная в сеть переменного тока, и обмотка управления, на зажимы которой подводится сигнал Uc (рис. 2.7).
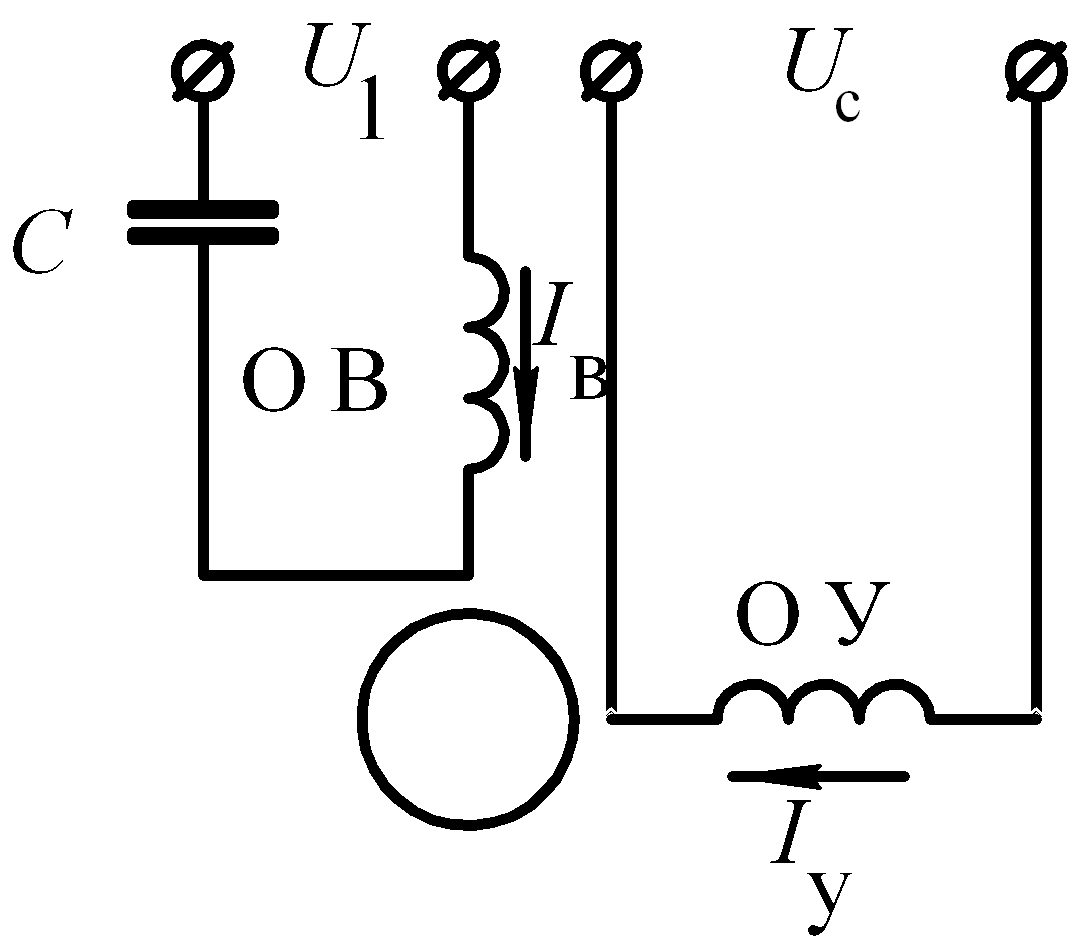
Рис. 2.7. Схема включения асинхронного исполнительного двигателя
Оси этих обмоток сдвинуты в пространстве относительно друг друга на угол 90°. В цепь обмотки возбуждения включается емкость, которая вызывает фазовый сдвиг между токами IВ и IУ. Все это обеспечивает создание в двигателе вращающегося магнитного поля. Если же на обмотку управления сигнал не подан, то в двигателе действует пульсирующее поле, которое не создает пускового момента.
Если же на обмотку управления сигнал был подан и двигатель начал вращаться, то после прекращения сигнала Uc двигатель может продолжать работать. Это явление, называемое самоходом, недопустимо в исполнительном двигателе, так как делает его неуправляемым. Для устранения самохода ротор исполнительного двигателя делают с повышенным активным сопротивлением.
Процесс устранения самохода поясним с помощью представленных на рис. 2.8 механических характеристик однофазного двигателя.

Рис. 2.8. Устранение самохода в асинхронном исполнительном двигателе
При наличии сигнала Uc двигатель работает с вращающимся магнитным полем и его механическая характеристика имеет вид кривой на рис. 2.8, а. Допустим, что двигатель работает в режиме, соответствующем точке А. После прекращения сигнала Uc поле статора становится пульсирующим и механическая характеристика двигателя приобретает вид кривой
Новый режим работы двигателя определится точкой В, при этом электромагнитный момент двигателя останется положительным и ротор двигателя продолжает вращаться.
Если увеличить активное сопротивление ротора, то графики и изменятся (максимум момента сместится в область больших скольжений). Так же изменит свою форму и график результирующего момента (рис. 2.8, б). Теперь после прекращения сигнала Uc, т. е. при переходе исполнительного двигателя в однофазный режим, электромагнитный момент становится отрицательным (точка В) и оказывает на ротор двигателя тормозящее действие, устраняя самоход.
К исполнительному двигателю предъявляется также требование малоинерционности (быстродействия), т. е. чтобы с подачей сигнала на обмотку управления ротор двигателя как можно быстрее достигал установленной частоты вращения. Для удовлетворения этого требования ротор исполнительного двигателя делается облегченным, не имеющим сердечника и обмотки. Такой двигатель называется двигателем с полым немагнитным ротором (см. рис. 2.9). Вместо обмотки на роторе двигателя располагается тонкостенный алюминиевый стакан с малым моментом инерции ротора. Это обеспечивает двигателю повышенное активное сопротивление ротора, а, следовательно, устранение самохода.
Двигатель имеет два статора: внешний, с обмоткой, и внутренний, без обмотки, входящий внутрь полого ротора. Внутренний статор необходим для уменьшения магнитного сопротивления основному потоку.
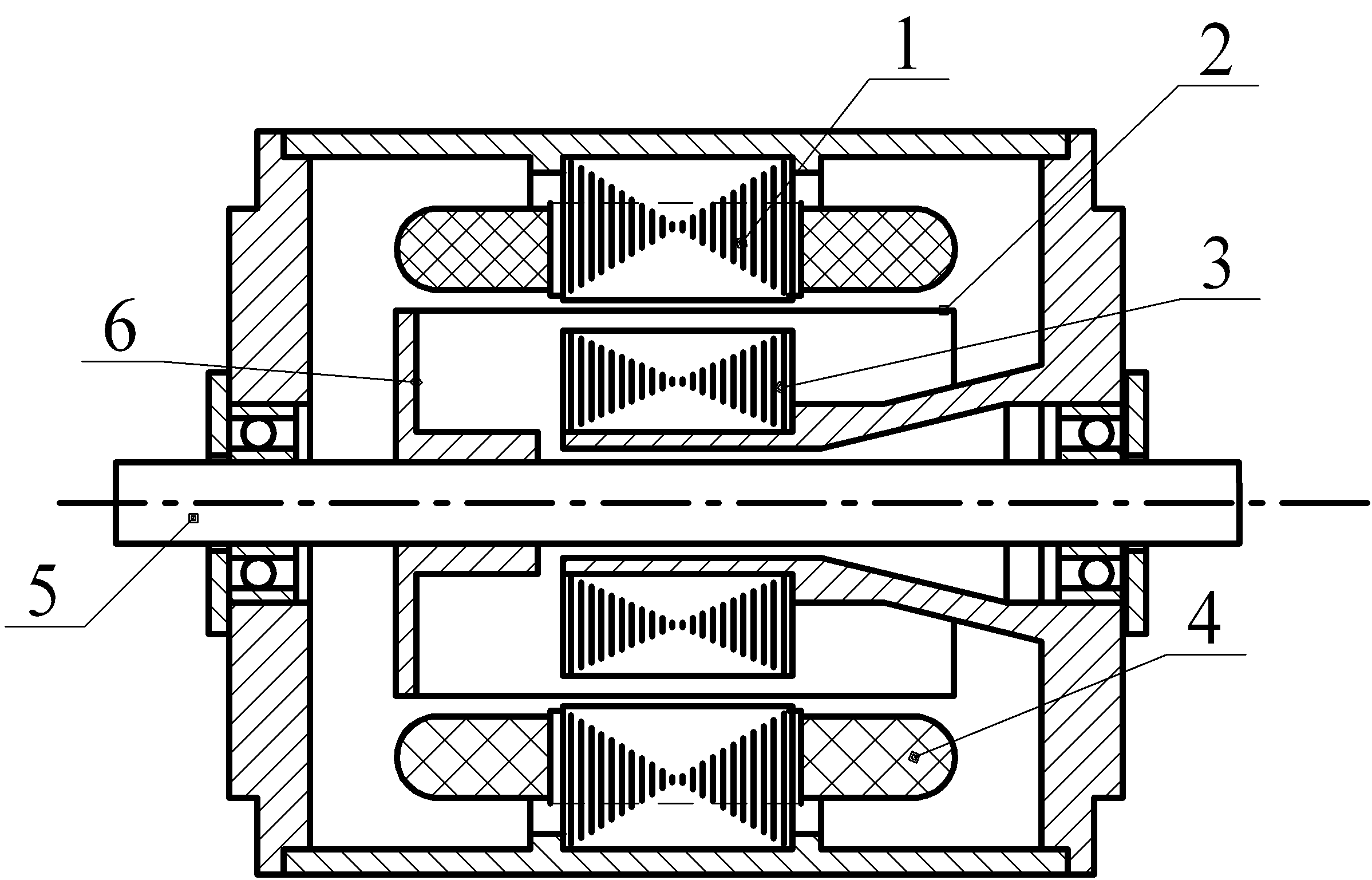
Рис. 2.9. Конструкция асинхронного двигателя
с полым немагнитным ротором:
1 – внешний статор; 2 – стакан ротора; 3 – внутренний статор; 4 – обмотка статора;
5 – вал; 6 – втулка для крепления стакана ротора
В сравнении с асинхронными двигателями обычной конструкции двигатели с полым немагнитным ротором имеют повышенные габариты и более низкий КПД. Объясняется это увеличенным воздушным зазором, который в этих двигателях складывается из зазора между внешним статором и стаканом ротора, толщины стенки немагнитного стакана и зазора между стаканом ротора и внутренним статором. Большой воздушный зазор ведет к увеличению намагничивающего тока и росту потерь.
Асинхронные управляемые двигатели и тахогенераторы
Управляемые двухфазные асинхронные двигатели малой мощности широко применяются в точных приборных и следящих системах, в счетно-решающих устройствах. Они используются и в качестве исполнительных двигателей (ИД) автоматических устройств промышленного назначения малой мощности. Назначение ИД — преобразование электрического сигнала (чаще всего напряжения управления) в механическое перемещение вала.
Асинхронные исполнительные двигатели выполняются мощностью от сотых долей ватта до нескольких сотен ватт как для стандартной (50 Гц), так и для повышенных (200, 400, 500 и 1000 Гц) частот при синхронной скорости вращения от 1500 до 30 000 об/мин (от 157 до 3141 рад/с). Статор двухфазный. Ротор асинхронного ИД может иметь следующие конструктивные модификации:
• полый немагнитный (с внутренним статором из листовой электротехнической стали);
обычный с обмоткой типа «беличья клетка»;
полый или сплошной ферромагнитный с немагнитным покрытием или без него.
Первый тип двигателя обеспечивает требуемые характеристики при высоком быстродействии, достигаемом за счет пониженного момента инерции ротора. Полый немагнитный ротор, по существу, представляет собой сплошную вторичную обмотку, механически отделенную от вторичного ферромагнитного сердечника, который служит для уменьшения сопротивления магнитной цепи двигателя. Выполняется обычно из алюминия и его сплавов. К числу других достоинств двигателей с полым немагнитным ротором относятся также высокая чувствительность (работа от малого сигнала), плавный и бесшумный ход из-за отсутствия зубцов ротора.
Важно также отметить, что в этом двигателе отсутствуют добавочные синхронные и реактивные моменты. К числу его основных достоинств относится малый момент инерции ротора. Конструктивная схема исполнительного двигателя с полым немагнитным ротором представлена на зазоре между внешним 2 и внутренним 3 магнитопровода запрессованного в корпус 4, размещаются обмотки управления и возбуждения 5. Внутренний магнитопровод укрепляется на консоли крышки 6. Вал 7, несущий полый ротор, опирается на подшипник 8.
Конструктивная схема асинхронного управляемого двигателя с полым ротором
Главный недостаток ИД с полым ротором — большой немагнитный зазор, складывающийся из двух воздушных зазоров и толщины самого ротора (0,1—0,8 мм). Возрастают намагничивающий ток и реактивная мощность, расходуемые на создание магнитного поля, уменьшаются cosφ и КПД.
Для полезных мощностей от долей до нескольких ватт наилучшие массогабаритные и динамические показатели имеют двигатели с обычным короткозамкнутым ротором типа «беличья клетка».
Исполнительные асинхронные двигатели с обмоткой на роторе типа «беличьей клетки» по сравнению с обычными асинхронными двигателями имеют следующие особенности:
малый диаметр и большая длина ротора, (это позволяет получить приемлемый момент инерции);
минимально возможный зазор между статором и ротором 30— 50 мкм (в целях уменьшения намагничивающего тока);
большое для машин малой мощности число периодов поля р = = 2-И (для увеличения быстродействия);
скос на одно зубцовое деление (в целях уменьшения добавочных моментов).
Кроме того, в этих двигателях для обеспечения интенсивного торможения при отключении управляющего сигнала иногда применяются встроенные электромагнитные демпферы. Наиболее просто устроен демпфер, в котором демпфирующий момент образуется при вращении дополнительного полого ротора из алюминиевого сплава в поле постоянных магнитов.
Двигатели с полым ферромагнитным ротором уступают по ряду показателей управляемым двигателям с короткозамкнутым и с полым немагнитным ротором. Это, естественно, ограничивает их применение.
В некоторых автоматических устройствах требуются управляемые двигатели, ротор которых не вращается, а поворачивается на небольшой угол, пропорциональный моменту двигателя и напряжению обмотки управления. Управляемые двигатели, предназначенные для работы в таком специфическом режиме, называются моментными.
Двухфазные асинхронные ИД применяются в маломощной (приборной) автоматике. Для привода промышленных механизмов большей мощности (силовая автоматика) — до десятков тысяч киловатт — используются управляемые двигатели других конструкций и принципов регулирования скорости. В настоящее время в связи с развитием полупроводниковой техники наибольшее применение получают способы регулирования скорости, основанные на использовании управляемых полупроводниковых преобразователей. В электроприводе переменного тока чаще других применяются:
система «преобразователь частоты — двигатель», в преобразовательном устройстве которой применяется регулируемый преобразователь частоты;
управление по схеме вентильного двигателя, представляющего собой двигатель постоянного тока, у которого механический коллектор заменен полупроводниковым коммутатором (управляемым инвертором); регулирование скорости обычно осуществляется за счет регулирования напряжения на входе инвертора.
Требования, предъявляемые к ИД. Характер требований, предъявляемых к ИД, определяется спецификой их работы в системах автоматики. Обычные требования, предъявляемые к двигателям вообще (прежде всего высокие энергетические показатели: КПД, coscp), смещаются у ИД на второй план.
Основные требования, предъявляемые к ИД:
отсутствие самохода (самоторможение двигателя при снятии сигнала управления);
устойчивость работы во всем диапазоне скоростей;
максимально возможная линейность механических и регулировочных характеристик;
большой пусковой момент;
высокое быстродействие, определяемое временем разгона двигателя до соответствующей данному сигналу скорости; быстродействие увеличивается с увеличением пускового момента и уменьшением момента инерции;
широкий диапазон регулирования скорости вращения;
малое напряжение трогания; надежность в работе.
В асинхронных ИД используется принцип регулирования скорости, который практически больше нигде не используется. Он заключается в изменении степени эллиптичности поля статора и соответствующем изменении соотношения между двигательным и тормозным режимами, одновременно возникающими в машине при эллиптическом поле.
Эллиптическое поле можно представить в виде наложения двух неодинаковых круговых полей, вращающихся в разные стороны с одной и той же скоростью, определяемой частотой питающих напряжений.
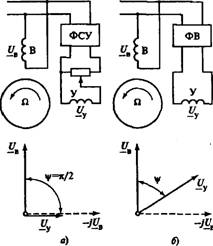
Рис. 3. Принципиальные схемы асинхронных исполнительных двигателей при амплитудном (а) и фазовом (б) управлении
По отношению к прямому полю (вращающемуся в ту же сторону, что и ротор) машина работает в двигательном режиме, по отношению к обратному — в тормозном. Работа двигателя при наличии обратного поля сопровождается большими дополнительными потерями. Поэтому используемый в АИД способ регулирования скорости неэкономичен и не может быть рекомендован для двигателей большой мощности.
§ 17.4. Асинхронные исполнительные двигатели

преобразование электрического сигнала в механическое перемещение — вращение вала. Такие электродвигатели называют исполнительными (ИД).
Характер требований, предъявляемых к исполнительным двигателям, определяется спецификой их работы: частые пуски, реверсы, постоянно изменяющаяся частота вращения. Основные требования — отсутствие самохода, т. е. самоторможение при снятии сигнала управления; широкий диапазон регулирования частоты вращения; линейность характеристик; большой пусковой момент; малая мощность управления; быстродействие (малоинерционность).
На статоре асинхронного исполнительного двигателя расположена двухфазная обмотка (см. § 16.2). Одна из фазных обмоток — обмотка возбуждения (ОВ) — постоянно включена в сеть с напряжением U1, а на другую — обмотку управления (ОУ) — напряжение (сигнал управления) Uc подается лишь при необходимости включения двигателя (рис. 17.7).
Для работы двухфазного ИД необходимо вращающееся магнитное поле, непременным условием возникновения которого является наличие пространственного и временного сдвигов между МДС фазных обмоток статора. Пространственный сдвиг указанных МДС обеспечивается конструкцией обмотки статора, при ко торой оси фазных обмоток сдвинуты в пространстве относительно друг друга обычно на угол 90 эл. град. Временной (фазный) сдвиг МДС создается либо питанием обмотки статора двухфазной сие темой напряжений (см. § 16.2), либо включением в цепь ОУ фазовращателя — устройства, позволяющего получать различные фазовые сдвиги напряжения на его выходе относительно напряжения на входе, т. е. относительно напряжения на обмотке возбуждения, либо включением последовательно в цепь ОВ емкости ( (рис. 17.7).
Последний способ включения ИД применяют наиболее часто Обычно значение емкости С выбирают из условия получения кругового поля при пуске двигателя. По окончании пускового периода двигатель работает с эллиптическим вращающимся полем.
В процессе управления двигателем изменяют сигнал Uс на ОУ при этом меняется как значение (амплитуда) МДС этой обмотки, так и ее фазовый сдвиг относительно МДС обмотки возбуждения. Поэтому рассматриваемый способ управления ИД называют амплитудно-фазовым.
Одно из основных требований к ИД — отсутствие самохода. Известно, что обычные асинхронные двигатели имеют небольшое активное сопротивление обмотки ротора и работают с малым критическим скольжением (см. § 13.3). Такие двигатели непригодны в качестве исполнительных, так как они обладают самоходом, т. е. при снятии сигнала управления двигатель будет продолжать работать как однофазный. Это иллюстрирует рис. 17.8, а, на котором точка А определяет режим работы двигателя с нагрузочным моментом Миом при наличии сигнала управления. При снятии сигнала управления поле статора становится пульсирующим (обмотка возбужения постоянно включена в сеть) и режим
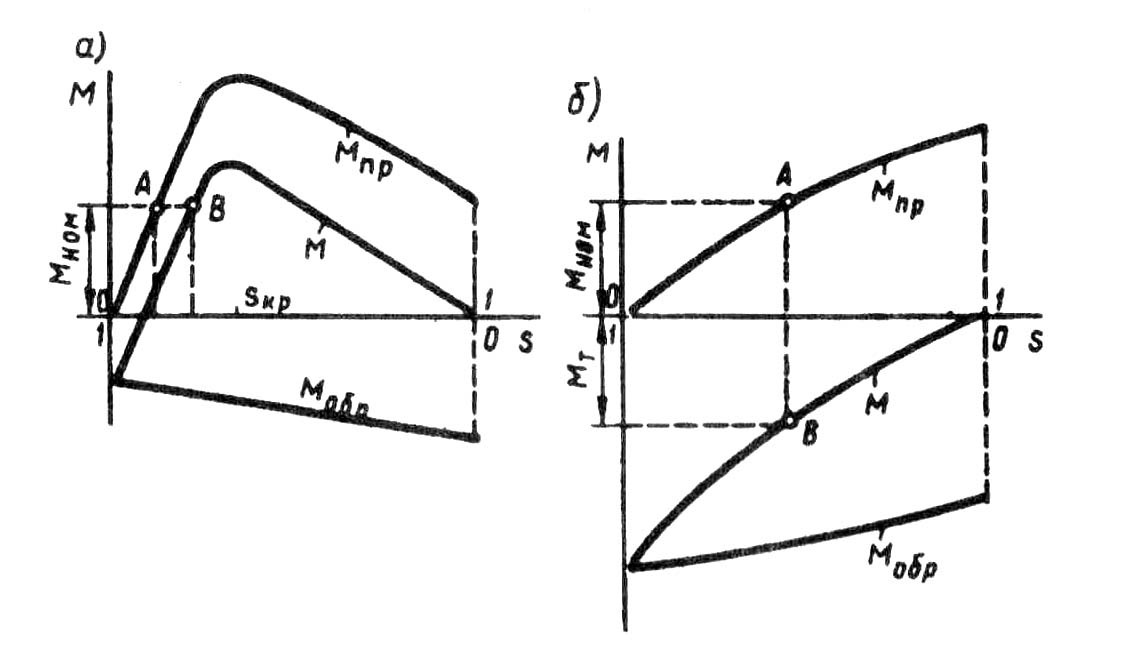
Рис. 17.8. Устранение самохода в асинхронном
работы двигателя «определяется точкой В на характеристике однофазного двигателя. При этом электромагнитный момент двигателя останется положительным. Если же увеличить активное сопротивление ротора, то форма кривых прямого Мпр, обратного Мобр и результирующего М = Мпр + Мобр моментов изменится (рис. 17.8, б): максимумы моментов Мпр и Мобр сместятся в область больших скольжений (sкр > 1 ). Теперь после прекращения сигнала управления, т. е. при переходе двигателя в однофазный режим, электромагнитный момент становится отрицательным Мт (точка В) и оказывает на ротор тормозящее действие, не допуская самохода.
К исполнительным двигателям предъявляется также требования малоинерционности (быстродействия), т. е. при подаче сигнала управления ротор двигателя должен очень быстро достигать установившейся частоты вращения. Выполнению этого требования
способствуют увеличение пускового момента, уменьшение синхронной частоты вращения поля статора и снижение момента инерции ротора. При повышенных частотах питающего напряжения (больших синхронных частотах вращения) ИД с ротором обычной (короткозамкнутой) конструкции из-за значительного момента инерции последнего не обладают требуемым быстродействием. В этом случае применяют асинхронные
исполнительные двигатели с полым немагнитным ротором (рис. 17.9). Полый немагнитный ротор представляет собой тонкостенный алюминиевый стакан 2, что, с одной стороны, обеспечивает ротору повышенное активное сопротивление, а с другой — весьма небольшой момент инерции.
Двигатель имеет два статора: внешний 1 с обмоткой и внутренний 3 без обмотки, входящий внутрь полого стакана ротора Внутренний статор необходим для уменьшения магнитного сопро тивления основному магнитному потоку.
По сравнению с исполни тельными двигателями обычно и конструкции двигатели с полым немагнитным ротором имею! повышенные габариты и невысокий КПД. Это объясняется повышенным зазором между наружным и внутренним статорами, который складывает ся из толщины стенки стакана ротора и двух воздушных зазо ров. Как известно, увеличение воздушного зазора способствуем росту намагничивающего тока двигателя и снижению его КПД.

Рис. 17.9. Асинхронный двигатель
с полым немагнитным ротором:
1 — внешний статор; 2 — стакан ротора; 3 — внутренний статор; 4— обмотка статора; 5 — вал; 6 — втулка крепления стакана ротора
Какие особенности имеет асинхронный исполнительный двигатель
Одним из главных требований, предъявляемых к исполнительным двигателям, является требование высокого быстродействия,под которым понимают способность двигателя достигать заданной частоты вращения за максимально короткое время.
Быстродействие определяется скоростью протекания электромагнитных и электромеханических переходных процессов, возникающих в двигателе при подаче сигнала управления.
Как известно, скорость затухания переходных процессов зависит от постоянных времени — электромагнитной и электромеханической. Благодаря большому активному сопротивлению ротора, электромагнитная постоянная времени Тэм= L/r становится на порядок меньше электромеханической. Поэтому электромагнитными переходными процессами здесь можно пренебречь и считать, что быстродействие исполнительного двигателя определяется только электромеханической постоянной времени. Последнюю найдем из уравнения движения при пуске двигателя вхолостую M = J×dw/dt. Здесь J — момент инерции вращающихся частей.