Определение состава сигналов управления исполнительными устройствами и логических функций для сигналов управления
Для управления механизмами базового варианта системы необходим следующий набор исполнительных сигналов:
А1 – вынос заготовки автооператором на линию центров («1» – вкл, «0» – выкл);
А2 – возврат автооператора в исходное положение («1» – вкл, «0» – выкл);
В1 – подвод задней бабки («1» – вкл, «0» – выкл);
В2 – отвод задней бабки («1» – вкл, «0» – выкл);
D – включение двигателя главного движения («1» – вкл, «0» – выкл);
P – зажим патрона («1» – вкл, «0» – выкл);
R1 – подвод резца («1» – вкл, «0» – выкл);
R2 – отвод резца («1» – вкл, «0» – выкл);
S1 – рабочее перемещение суппорта («1» – вкл, «0» – выкл);
S2 – возврат суппорта в исходное положение («1» – вкл, «0» – выкл).
Подача сигналов включения исполнительных механизмов осуществляется на основе логических функций. Аргументами логических функций являются сигналы с датчиков системы, по которым определяется текущее состояние системы управления станком, и, в случае необходимости, элементы памяти, фиксирующие стадии работы системы. Реализацию логических функций осуществляют программируемые логические контроллеры, обеспечивающие прием сигналов с датчиков, вычисление логических функций и выдачу сигналов на исполнительные механизмы. Вычисление логических функций будет выполняться в программной системе GENIE.
Для правильного описания логических функций необходимо составить таблицу состояний (переключений) системы (табл.1). В ней каждому состоянию соответствует выполнение какого-либо действия исполнительного механизма, которое однозначно определяется состоянием датчиков и элементов памяти.
Рассмотрим работу перемещающихся механизмов, для управления которых есть два сигнала (суппорт, автооператор, задняя бабка, резец). Выдача таких сигналов описывается одной строкой таблицы состояний. В строках таблицы состояний ячейки белого и желтого цветов. Белые ячейки соответствуют сигналам с датчиков, которые не изменяют своего состояния в процессе выполнения перемещения или включения исполнительного механизма: «1» (датчик включен) или «0» (датчик выключен). Ячейки желтого цвета показывают состояния датчиков, изменяющих свое состояние в процессе срабатывания механизма. В этих ячейках верхнее значение соответствует исходному состоянию датчика в начале перемещения механизма, нижнее значение – в конце перемещения. Как уже говорилось, состояние перемещающегося механизма контролируется двумя датчиками крайних положений. Когда механизм начинает свое перемещение, датчик, который был включен и фиксировал его положение, отключается. Т.е. он меняет свое состояние с «1» на «0». Когда перемещение механизма заканчивается, включается датчик противоположного положения, меняющий свое состояние из «0» на «1». Таким образом, датчик, который в конце перемещения меняет свое состояние из «0» на «1», практически является источником сигнала для отключения работы данного механизма.
Таблица 1 – Таблица состояний системы
1. Исходное состояние
4. Зажим патрона
5. Отвод автооператора
6. Включение двигателя
8. Движение суппорта
10. Выключение двигателя
11. Отвод суппорта
13. Разжим патрона
При составлении логической функции управляющего сигнала перемещающегося механизма (A1, A2, B1, R1, S1) следует придерживаться следующих правил. Через логическое «И» включаем все сигналы с датчиков, которые не изменяют своего состояния в процессе работы механизма, при этом для механизма, контролируемого двумя датчиками, берем тот, который находится в состоянии «1». Далее, через лог. «И» в функцию включаем инверсное (лог. «НЕ») значение датчика, который отключает работу механизма, т.е. изменяет свое состояние на противоположное в самом конце цикла перемещения механизма.
Рассмотрим функцию сигнала А1 – вынос заготовки автооператором на линию центров. Этот механизм перемещающийся, сигналу A1 соответствует строка 2 таблицы состояний. При этом задняя бабка находится в исходном состоянии (b1=1), суппорт – в исходном (s1=1), резец – в исходном (r1=1), патрон разжат (p=0), двигатель выключен (d=0). Сигнал A1 продолжает действовать до тех пор, пока не сработает датчик a2 (a2=1), т.е. автооператор не выполнит выдвижение детали на линию центров). Таким образом, логическая функция A1 примет вид:
Как правило, для того, чтобы составить логические функции включения механизмов, одних только сигналов с датчиков оказывается не достаточно. Если, например, обратиться к таблице и просмотреть строку 6 (включение двигателя) и строку 12 (отвод бабки), можно увидеть, что они полностью идентичны. Т.е. в момент включения двигателя состояния датчиков точно такие же, как и в момент подачи сигнала отвода задней бабки. Это значит, что по одним состояниям датчиков определить момент срабатывания этих механизмов нельзя. Поэтому дополнительно к датчикам в систему управления цикловой автоматикой вводят элементы памяти, состояния которых используются в качестве дополнительных аргументов в логических функциях.
Цикловые механизмы обычно имеют две стадии работы, которые в нашем случае можно представить как стадию обработки, заканчивающуюся срабатыванием датчика s2 – «обработка закончена», и стадию возврата механизмов в исходное состояние.
Для определения состояния станка введем переменную bsost:
bsost=1, если ведется обработка – состояние «обработка»;
bsost=0, если осуществляется возврат механизмов в исходное состояние – состояние «возврат в исходное».
Ее удобно использовать для формирования сигналов управления механизмами после того, как обработка закончится, т.е. на этапе возврата резца, суппорта, задней бабки в исходное состояние. Также эта переменная управляет индикацией – идет процесс обработки, или осуществляется возврат механизмов станка в исходное состояние по окончании обработки.
В этом случае логические функции работы перемещающихся механизмов можно представить в следующем виде:
А1 (задняя бабка в исходном, суппорт в исходном, резец в исходном, патрон разжат, двигатель выключен, сигнал A1 продолжает действовать до тех пор, пока не сработает датчик a2, т.е. автооператор не выполнит выдвижение детали на линию центров);
А2 (задняя бабка в рабочем, суппорт в исходном, резец в исходном, патрон зажат, двигатель выключен, сигнал А2 действует, пока не сработает датчик a1);
В1 (автооператор в подведенном состоянии, суппорт в исходном, резец в исходном, патрон зажат, двигатель выключен, сигнал B1 действует, пока не сработает датчик b2);
S1 (автооператор в исходном, задняя бабка подведена, резец подведен, патрон зажат, двигатель включен, сигнал S1 действует, пока не сработает датчик s2);
R1 (автооператор отведен, задняя бабка подведена, суппорт в исходном, патрон зажат, двигатель включен, сигнал R1 действует, пока не сработает датчик r2);
R2 (автооператор отведен, задняя бабка подведена, суппорт в конечном положении, патрон зажат, двигатель включен, этап работы станка – возврат механизмов в исходное состояние, сигнал R2 действует, пока не сработает датчик r1);
S2 (автооператор в исходном, задняя бабка подведена, резец в исходном, патрон зажат, двигатель выключен, этап работы станка – возврат механизмов в исходное состояние, сигнал S2 действует, пока не сработает датчик s1);
В2 (автооператор в исходном, суппорт в исходном, резец в исходном, патрон зажат, двигатель выключен, этап работы станка – возврат механизмов в исходное состояние, сигнал B2 действует, пока не сработает датчик b1).
Функции включения механизмов, которые должны работать в течение нескольких циклов (строк таблицы состояний), нужно формировать путем анализа строк таблицы состояний, включая через логическое «И» состояния датчиков, не изменяющих свое состояние на протяжении всех строк. Если это не дает однозначного описания работы механизма, нужно использовать логическое «ИЛИ». Момент окончания работы механизма нужно привязать к датчику, который меняет свое состояние. Таких сигналов в базовом варианте два – сигнал включения двигателя D и сигнал включения зажима патрона Р.
Рассмотрим подробнее формирование сигналов D и P. Двигатель включается сразу после возврата автооператора в исходное положение, при этом есть три механизма, состояния которых в процессе работы двигателя не изменяются: автооператор – в исходном положении (a1), задняя бабка – в подведенном положении (b2), патрон – в зажатом состоянии (p). Отключение двигателя должно происходить сразу после отвода резца, т.е., когда сработает датчик r1 – из состояния «0» в состояние «1». Однако, датчик r1 в момент включения двигателя также находится в состоянии «1», он изменит свое состояние только после подвода резца. Значит, однозначно описать режим двигателя во включенном состоянии только одними датчиками нельзя. Нужно воспользоваться переменной, хранящей информацию о стадии обработки.
Разобьем время работы двигателя на две фазы – первая, приходящаяся на стадию «обработка», вторая – на стадию «возврат в исходное». Первая фаза приходится на строки 6,7,8, причем строка 8 – последняя строка стадии «обработка». Значит, эту фазу можно описать логическим выражением:
Вторая фаза приходится на строку 9. Строка 9 описывает работу сигнала R2 – отвод резца, значит, этот сигнал можно использовать и для описания второй стадии работы двигателя. Обе фазы объединяем через логическое «ИЛИ»:
Время работы патрона также приходится на две стадии. Первая фаза соответствует строкам 4, 5, 6, 7, 8. Фаза начинается со срабатывания датчика b2, который далее своего состояния не меняет, все остальные датчики в строках 4-8 могут менять свое состояние. Фаза заканчивается вместе с окончанием стадии «обработка». Значит, ее можно описать логическим выражением:
Вторая фаза приходится на строки 9, 10, 11, 12. Единственным датчиком, не изменяющим своего состояния, является a1 – «автооператор отведен». Заканчивается фаза вместе со срабатыванием датчика b1 – «задняя бабка отведена» (из состояния «0» в «1»). Значит, эту фазу можно описать логическим выражением:
Объединяем через логическое «ИЛИ» обе фазы и получаем сигнал P:
На основе логических функций необходимо сформировать и реализовать с помощью блока Basic Script логические выражения для всех управляющих сигналов.
При формировании системы управления необходимо создать элемент памяти, реализуемый с помощью виртуального тега – SOSTOY (состояние). При SOSTOY=1 происходит обработка, при SOSTOY=0 – возврат механизмов станка в исходное состояние. Сброс этого элемента происходит только при срабатывании датчиков, определяющих конец стадии «обработка» и конец стадии «возврат в исходное». В базовом варианте задания это будут датчик s2 – суппорт закончил рабочее перемещение, и датчики a1, b1, r1, s1 – когда все эти датчики станут в состояние «1», все механизмы будут приведены в исходное положение, датчик р при этом должен быть в состоянии «0» — патрон разжат.
Вид логических функций можно просмотреть на странице с текстом программы. В ней логические функции обозначены следующим образом:
Лог. «И» – AND (математический символ — );
Лог. «ИЛИ» – OR (математический символ — );
Лог. «НЕ» – NOT (математический символ – черта над переменной).
Исполнительные механизмы, сигнализаторы, реле
Механизмы исполнительные пневматические типа МИП — предназначены для перемещения регулирующих и запорно-регулирующих органов в системах автоматического и дистанционного управления. Условный ход штока: 100, 200, 320, 400 мм.
МИП-ПТ (с тормозом);
Масса: для МИП-Э – 18 –29 кг; для МИП-П и –ПТ – 21,4 – 31,5 кг.
Позиционеры электропневматические типа ПЭП — gредназначены для управления пневматическими односторонними мембранными и двусторонними поршневыми исполнительными механизмами пропорционально входному электрическому сигналу и уменьшения рассогласования хода исполнительного механизма путем введения обратной связи по положению выходного звена.
ПЭП-1 – входной сигнал 0 — 5 мА; давление питания 2.5 кгс/см2
ПЭП-2 – входной сигнал 4 — 20 мА; давление питания 2,5 кгс/см2
ПЭП-3 – входной сигнал 4 — 20 мА; давление питания до 6,3 кгс/см2; коррозионностойкое исполнение;
ПЭП-4 – входной сигнал 0 — 5 мА; давление питания до 6,3 кгс/см2
Условный ход штока: от 4 до 100 мм.
Электропневматические преобразователи типа ЭПП — gредназначен для преобразования унифицированного непрерывного электрического сигнала постоянного тока в унифицированный пропорциональный пневматический непрерывный сигнал. Преобразователь совместно.с позиционерами применяется в системах автоматического и дистанционного управления технологическими процессами.
Входной сигнал — от 0 до 5 мА (ЭПП-1); от 4 до 20 мА (ЭПП-2).
Давление питания — 1,4 кгс/см 2 .
Выходной пневматический аналоговый сигнал — от 0,2 до 1,0 кгс/см 2 .
Допускаемая основная погрешность – I% и 2%. Масса: 2,4 кг.
Сигнализатор перепада давления типа СПД-10/120 — gредназначен для коммутации электрических цепей при достижении установленной величины разности давлений контролируемой среды. Применяется в системах автоматизации компрессорных установок и доменных печей.
В зависимости от рабочей среды сигнализатор изготавливается в трех исполнениях:
СПД-10/120-Г — воздух или газ, не содержащий коррозионно-активных агентов и минеральные масла.
СПД-10/120-В — техническая вода и конденсат.
СПД-10/120-Астр. — газ, содержащий сероводород до 25% объемных.
Диапазон настройки разности давлений, при которых срабатывает сигнализатор, от 0,3 до 10 кгс/см2. Количество коммутируемых цепей – 2.
Статическое давление рабочей среды 120 кгс/см2.
Масса: 9,5 кг (СПД-10/120 В и Г); 15,0 кг (СПД-10/120-Астр).
Панель байпасная типа ПБ-1 — п редназначена для осуществления перехода с автоматического регулирования на ручное управление пневматическими исполнительными механизмами и обратно и применяется в системах автоматизации технологических процессов.
Управляющий пневматический сигнал в автоматическом и ручном режиме работы — от 0,2 до 1,0 кгс/см 2 .
Давление питания панели — 1,14 кгс/см 2 .
Класс точности манометра — 1,5. Масса: 1,2 кг.
Регулятор перепада давления типа РПД-3/120-1 — п редназначен для поддержания заданного перепада (разности давлений) масла над газом в системе уплотнения нагнетателей, газоперекачивающих агрегатов.
Пределы настройки (уставки) разности давлений масла и газа — от 3 до 0,7 кгс/см 2 .
Условная пропускная способность при давлении масла 5 кгс/см2 — 250 л/мин.
Условное давление газа 120 кгс/см 2 .
Зона нечувствительности – 0,05 кгс/см 2 .
Рабочая среда: для РПД-3/120 — масло турбинное марки Тп-22с; природный газ или сжатый воздух; для РПД-3/120-Ор. — природный газ с содержанием сероводорода до 4,5%.
Масса: 28 кг; 37 кг.
Сигнализаторы разности давления типа СРД.2-М1 — с давлением рабочей среды (воздух а, природного или доменного газов, неагрессивных относительно сталей , медных сплавов, цинка, кадмия и маслостойкой резины) до 6 , 3 кгс/см 2 :
Пределы настройки разности давлений 0,004 —0 , 04 МПа.
Зона нечувствительности — 0,0015 МПа (для уставок от 400 до 2000;
— 0,003 МПа (для уставок от 2000 до 4000.
Механизм исполнительный поворотный типа МИП-1 — п редназначен для поворота регулирующих и запорно-регулирующих органов в системах автоматического и дистанционного управления.
Механизмы исполнительные поворотные изготавливаются шестнадцати модификаций в зависимости от типа действия (односторонние и двусторонние), диаметра цилиндра (100 и 125 мм), наличия управляющих устройств (с пневмораспределителем, с позиционером электропневматическим, с позиционером пневматическим, или без них).
Входной сигнал: электрический от 4 до 20 мА; пневматический аналоговый от 0,2 до 1,0 кгс/см 2 ; пневматический дискретный 0,1 и 1,4 кгс/см 2 ; пневматический — давление питания.
Давление питания: от 2,5 до 6,0 кгс/см 2 . Угол поворота выходного вала — от 0 до 90 о .
Реле контроля протекания жидкости типа РКПЖ-1 — Реле предназначено для выдачи электрического сигнала посредством коммутации электрической цепи при заданном значении уставки по перепаду давлений. Применяется для контроля протекания жидкости контролируемых участков трубопроводов.
Рабочая жидкость — вязкостью до 70 мм2/с, а также рабочие среды -газ (неагрессивный относительно стали) и сжатый воздух. Давление рабочей среды — от 0,5 до 6,0 кгс/см2. Пределы настройки (уставки) перепада давлений рабочей среды, при которых срабатывает реле, — от 0,1 до 2,0 кгс/см2. Реле срабатывает при увеличении перепада давлений. Параметры коммутируемой цепи: напряжение постоянного тока (0,2-30) В; напряжение переменного тока (0,2-250)В; ток, постоянный и переменный – (2х10-4 — 3) А; максимальная коммутируемая мощность 70 Вт, 300 ВА.
Реле протока жидкости типа РПЖ-1М — р еле предназначено для коммутации электрических цепей при достижении установленной величины расхода воды.
Рабочая среда – вода с параметрами:
— Рабочий диапазон температур – от 5 до 70 ° С
— Чистота не ниже 10 класса чистоты жидкостей
Давление рабочей среды на входе реле – от 0,05 до 0,4 Мпа
Коммутируемый электрический сигнал: напряжение постоянного тока — 0,2 — 30В; напряжение переменного тока – 0,2 – 250 В; ток постоянный и переменный – 2·10 — 4 — 3А
Верхний предел установки 30 л/мин
Нижний предел установки 1,5 л/мин
Условный проход — ½ » (15 мм)
Механизм исполнительный гидравлический поршневой МГП-И-125/200 — предназначен для управления регулирующими органами поворотного или возвратно-поступательного движения в системе автоматического регулирования и управления производственными процессами КОЦП.
Диаметр гидроцилиндра — 125 мм.
Рабочая жидкость — минеральные масла вязкостью от 7 до 70 сСт в диапазоне рабочих температур жидкости от 5 до 70оС. Тонкость фильтрации — не хуже 0,04 мм.
Порог чувствительности ненагруженного механизма — по перепаду давления на поршне, не более 2 %.
Рабочее положение в пространстве — любое.
При заинтересованности просим направить в наш адрес заявку
с объемом и маркировкой запрашиваемой продукции
Телефоны отдела продаж:
+7 (8635) 22-76-49, +7 (499) 638-20-16
Какие сигналы применяются для управления исполнительными механизмами
Здравствуйте, уважаемые коллеги!
Наш обещанный 9-й урок немного запоздал, за что и приношу Вам свои извинения. Но лучше поздно, чем никогда.
Прежде чем мы начнем, хочу поздравить Вас всех с Новым годом! Пожелать в Новом году всего хорошего! В условиях кризиса не опускать руки и не вешать носы! Верить в то, что твои знания, твоя настойчивость в достижении поставленных целей принесут успех.
А теперь.
УРОК №9. Исполнительные механизмы и коммутационные устройства.
В уроке №8 мы рассматривали первичные средства измерения. Это «глаза» и «уши» всех систем автоматизации. Текущие значения измеренных параметров или дискретные сигналы о достижении параметрами пороговых состояний они передают в «мозг» системы, т.е. вторичный прибор, регулятор, контроллер, схему и т.д. Воспринимая и анализируя поступающие данные, «мозг» вырабатывает управляющие воздействия (команды) и выдает их на исполнительные механизмы.
В широком смысле, все устройства, включение, перемещение, движение, выключение которых вызывает изменение в технологическом процессе, называются исполнительными механизмами. Исходя из этого определения, исполнительными механизмами можно назвать и двигатели технологического оборудования (насосов, вентиляторов и т.д.), и приводы задвижек, заслонок и клапанов, и пневмоцилиндры, и т.д. В системах автоматизации, обычно, исполнительными механизмами называют различную запорную и регулирующую арматуру с приводами, которая устанавливается на технологических трубопроводах и воздуховодах.
По своим конструктивным особенностям арматура, устанавливаемая на трубопроводах, подразделяется на вентили, краны, клапаны, затворы, заслонки, задвижки и т.д. Если арматура имеет один вход и один выход, то она называется двухходовой. Клапаны также могут быть выполнены трехходовыми и четырехходовыми. Такие клапаны перенаправляют потоки в трубопроводах. Различают смесительные и разделительные конструкции трехходовых клапанов. Смесительный клапан имеет два входа и один выход. Разделительный клапан – один вход и два выхода. Понимание этого различия является очень важным при проектировании технологических систем и автоматики к ним, т.к. конструкция выбранного клапана должна соответствовать заданным алгоритмам работы системы. Нужно отметить, что на нашем рынке в основном присутствуют смесительные клапаны.
Конструктивные особенности арматуры также подразделяют ее на запорную, регулирующую и запорно-регулирующую. Задача запорной арматуры полностью перекрывать трубопровод или полностью его открывать на проток. Причем в закрытом состоянии протечка через арматуру должна практически отсутствовать. Такая арматура в процессе работы может быть переведена только из одного конечного состояния в другое – «открыто»/«закрыто». Регулирующая арматура также может находиться в полностью открытом или полностью закрытом состоянии, но в процессе работы она предназначена для регулирования расхода среды, протекающей через нее, т.е. такая арматура может быть приоткрыта на любые n% в диапазоне от 0…100%. К регулирующей арматуре не предъявляется жестких требований по протечке через нее среды в полностью закрытом состоянии и она может составлять до 1% от величины условной пропускной способности клапана. Запорно-регулирующая арматура выполняет функции регулирующей, однако, в закрытом состоянии она должна работать как запорная.
Кстати, запорной, может быть любая по конструкции арматура. Для регулирования подходят только конструкции с равнопроцентными или линейными характеристиками. Характеристикой называется зависимость величины потока от степени открытия арматуры. В качестве регулирующих обычно используются седельные клапаны, очень редко, для малых расходов – игольчатые вентили. В последнее время ряд зарубежных фирм предлагают в качестве регулирующих шаровые клапаны, добавив в конструкцию клапана коррекционный диск, который обеспечивает равнопроцентную характеристику. Для регулирования потоков воздуха в воздуховодах вентиляционных систем используют поворотные заслонки.
Запорная арматура, как правило, выбирается проектантами, разрабатывающими технологические разделы проекта, и нас, как «автоматчиков» волнует только тип ее привода, о чем мы поговорим позже. А вот регулирующие клапаны должны выбираться специалистами в области автоматизации по исходным данным, предоставленным проектантом-технологом. Кстати, под «технологами», я подразумеваю не только специалистов по разделу проекта «Технология», но разработчиков разделов «Отопление и вентиляция», «Водоснабжение и канализация», «Холодоснабжение» и т.д.
Для выбора регулирующего клапана необходимо иметь следующие исходные данные:
— тип среды (жидкость, пар, газ), протекающей по трубопроводу;
— температуру и давление среды;
— допустимую потерю давления на клапане;
— расход среды.
Если жидкость, не вода, то при выборе клапана также надо учитывать ее агрессивность по отношению к материалу клапана.
Вооружившись этими данными можно приступать к расчету клапана. Формула расчета зависит от типа среды (жидкость, пар, газ).
Жидкость.
 или
или  , где
, где
С – удельная пропускная способность регулирующего дроссельного органа (численно равна расходу несжимаемой жидкости с удельным весом 1г/см3 при перепаде давления на дроссельном органе 1кг/см2) , в каталогах импортной арматуры эта величина имеет обозначение КVS;
Q – объемный расход жидкости, м3/ч;
G – весовой расход жидкости, т/ч;
y – удельный вес при рабочей температуре и давлении, г/см3;
?p – перепад давления на регулирующем дроссельном органе, кг/см2.
Пар.
 или
или  , где
, где
G – весовой расход пара, кг/ч;
y – удельный вес при рабочей температуре и давлении, кг/м3;
?p – перепад давления на регулирующем дроссельном органе, кг/см2;
? – удельный объем, м3/кг;
? – поправка на расширение газа или пара:
 , где
, где
р1 – абсолютное давление перед регулирующим дроссельным органом, кг/см2.
Газ.
 или
или  , где
, где
Q – объемный расход газа, м3/ч;
G – весовой расход газа, кг/ч;
y – удельный вес при рабочей температуре и давлении, кг/м3;
?p – перепад давления на регулирующем дроссельном органе, кг/см2.
Газ низкого давления.
 или
или  , где
, где
Q – объемный расход газа, м3/ч;
G – весовой расход газа, кг/ч;
y – удельный вес при рабочей температуре и давлении, кг/м3;
?p – перепад давления на регулирующем дроссельном органе, мм вод. ст.
Приведенные формулы взяты из справочника по системам автоматического регулирования и являются общими для всех видов регулирующей арматуры. Однако, если взять каталог любого из импортных поставщиков регулирующей арматуры, то каждый из них предлагает свои способы выбора оборудования. Для облегчения жизни проектантов, это, как правило, не формулы, а номограммы или компьютерные программы.
В любом варианте выбора присутствует такой немаловажный параметр, как ?p – перепад давления на регулирующем дроссельном органе. Как следует из названия регулирующего органа, он дросселирует поток в трубопроводе или воздуховоде. Дросселирующее устройство работает за счет создания на себе перепада давлений, которое в каждой точке регулировочной характеристики соответствует расходу. Следовательно, регулирующий клапан не создающий перепада давления или с очень малым перепадом давления не работает. С другой стороны, слишком большой перепад давления на клапане создает значительное сопротивление в трубопроводе, что влечет за собой выбор насоса, создающего давление в данном трубопроводе, с большим напором. А это приводит к удорожанию. Как правило, перепадом давления задаются в пределах 10….50кПа. Это значение перепада подставляют в расчет, по которому определяют удельную пропускную способность и конкретное значение перепада давления для выбранного клапана.
Например.
Выбираем шаровый регулирующий клапан для воды — расход 10м3/ч. Задаемся перепадом давления 20кПа. Выбор выполняем по программе расчета фирмы BELIMO. Оба вышеуказанных значения подставляем в расчет и получаем несколько подобранных вариантов:
• КVS = 16, ?p = 39кПа – клапаны диаметрами 25мм, 32мм или 40мм;
• КVS = 25, ?p = 16кПа – клапаны диаметрами 40мм или 50мм;
• КVS = 40, ?p = 6кПа – клапан диаметром 50мм.
С точки зрения необходимого для работы клапана перепада давления, а также уменьшения стоимости клапана нас устраивает клапан с КVS = 16, ?p = 39кПа. Но не забываем, что чем больше ?p, тем большее сопротивление создает клапан. Дальше работаем с технологом. Предлагаем ему клапаны КVS = 16, ?p = 39кПа или КVS = 25, ?p = 16кПа. Клапан КVS = 40, ?p = 6кПа отбрасываем, т.к. перепад давления слишком низкий. Технолог рассчитывает гидравлику всего участка и осуществляет окончательный выбор клапана. Хочу обратить внимание, что при этом диаметр клапана для «автоматчика» не имеет никакого значения.
При расчете трехходовых смесительных клапанов необходимо учитывать, что расход среды, по которому ведется расчет, должен быть равен сумме расходов двух смешивающихся потоков.
Кстати, при выборе арматуры необходимо обращать внимание для установки на какой среде она предназначена, максимальные значения температуры и давления этой среды.
Теперь перейдем к приводам.
Прежде всего они подразделяются по типу подводимой к ним энергии – электрические, пневматические, гидравлические. В инженерных системах зданий используются клапаны с электрическими приводами и мы будем рассматривать их.
Электрические приводы можно подразделить на:
• многооборотные реверсивные электродвигатели для задвижек;
• однооборотные реверсивные или шаговые электродвигатели для клапанов и заслонок;
• электромагнитные катушки для вентилей.
Запорная арматура может комплектоваться всеми выше перечисленными видами приводов (кроме шаговых). Конкретный тип электропривода определяется конструктивной совместимостью арматуры и привода и необходимым усилием, которое требуется для выполнения движения. Во всех каталогах на арматуру указывается тип привода или приводов на выбор, с которыми она работает.
Регулирующие клапаны и заслонки комплектуются только однооборотными реверсивными или шаговыми двигателями. При этом существует два вида управления такими приводами – импульсный и аналоговый. Импульсное управление осуществляется подачей коротких дискретных команд (импульсов), приводящих к включению однооборотного реверсивного электродвигателя в ту или иную сторону на короткое время. При этом в седельном клапане двигатель поднимает или опускает шток клапана на несколько миллиметров, а в шаровом поворачивает шар на несколько градусов., что приводит к увеличению или уменьшению через него протока.
Для осуществления аналогового управления в привод с однооборотным реверсивным двигателем или с шаговым двигателем встраивается электронная плата. Плата принимает управляющий аналоговый сигнал (0…10)В и управляет реверсивным двигателем, имея от него обратную связь, или шаговым двигателем без обратной связи.
При выборе типа управления (импульсный или аналоговый) регулирующим клапаном или заслонкой необходимо учитывать следующее. Приводы с импульсным управлением имеют, по сравнению с аналоговыми, несколько меньшую стоимость. Однако, при управлении таким приводом регулирующий контроллер не «знает» в каком положении в данный момент находится клапан или заслонка. Что не позволяет его применять, когда по алгоритму работы требуется ограничивать ход клапана или заслонки, т.е. не закрывать или не открывать их полностью. Вернее, такой привод можно применить, но только получая от него сигнал обратной связи, для чего на приводы ряда фирм доустанавливается потенциометр. Это в свою очередь приводит к удорожанию, т.к. к стоимости добавляется, во-первых, стоимость потенциометра, во-вторых, прокладка от него кабельной трассы, в-третьих, задействование аналогового входа на контроллере. В итоге стоимость применения привода с импульсным управлением будет равна стоимости привода с аналоговым.
При выборе привода следует обращать внимание на такую важную характеристику, как время хода штока для приводов седельных клапанов или время поворота для шаровых клапанов и воздушных заслонок. В каталогах приводится или время полного хода (поворота), т.е. время за которое переводит клапан из одного конечного состояния в другое, или время хода в с/мм. Для различных приводов седельных клапанов время хода может варьироваться от 1.5с/мм до 7.5с/мм, при длине штока 20мм это соответствует времени полного хода 30…150с. Время полного поворота приводов шаровых клапанов составляет около 100с. Для приводов заслонок это время составляет от 30с до 150с. У многих типов приводов это время является настраиваемым в приведенных выше диапазонах.
Выбираемое время должно соответствовать скорости протекания технологического процесса. Для процессов, где при внесении возмущений регулируемые параметры значительно изменяются за короткий промежуток времени, необходимо выбирать приводы, которые способны быстро восстановить заданное значение параметра. В этом случае предпочтительнее седельные клапаны с приводами с малым временем полного хода. Для «медленных» процессов выбираются шаровые клапаны или седельные с приводами с большим временем полного хода.
Например, при автоматизации теплового пункта надо учитывать, что процесс изменения теплопотребления в системе отопления является медленным, а процесс изменеия потребления горячей воды в системе горячего водоснабжения – быстрым.
В конструкции ряда приводов для запорной и регулирующей арматуры присутствует возвратная пружина. При подаче питания на такой привод запорной арматуры он становиться в одно крайнее положение (открытое или закрытое), при прекращении питания пружиной возвращается в другое крайнее положение. Привод с возвратной пружиной для регулирующей арматуры может быть только с аналоговым управлением. При наличии питания и подаче управляющего сигнала на такой регулирующий привод он устанавливается в положение соответствующее уровню сигнала, при пропаже питания, привод переводит арматуру в какое-то из крайних положений. Существуют приводы, которые открывают арматуру при пропаже питания, и приводы, которые ее закрывают. Приводы с возвратными пружинами достаточно широко применяются там, где пропажа питания может привести к аварийным последствиям.
Например, при работе в зимний период приточной вентиляционной установки с водяным воздухонагревателем система автоматического управления должна защищать воздухонагреватель от замораживания. При угрозе замораживания автоматика выдает ряд команд на оборудование установки, в том числе закрывает заслонку наружного воздуха. Такую команду можно подать и на заслонку без возвратной пружины, но это возможно только при наличии питания. А если пропало питание? Исходя из этих соображений, заслонки наружного воздуха всегда оборудуются приводами с возвратными пружинами, работающими на закрытие.
Мы с Вами кратко рассмотрели исполнительные механизмы с электрическими приводами. Теперь перейдем к низковольтным коммутационным устройствам, т.е. электроаппаратуре, которая подает (коммутирует) питание на исполнительные механизмы, воспринимая команды от управляющих приборов или органов ручного управления.
К коммутационным устройствам можно отнести автоматические выключатели, пускатели, устройства плавного пуска, частотные преобразователи, реле.
Автоматические выключатели.
Автоматические выключатели – это коммутационные контактные аппараты, предназначенные для автоматического отключения питания при коротких замыканиях, перегрузках и недопустимых снижениях напряжения, а также для оперативного включения/отключения электрических цепей персоналом. Т.е. автоматические выключатели выполняют одновременно функции защиты и управления.
При проектировании сетей электроснабжения выбор автоматических выполняется расчетом с учетом многих факторов (характеристик потребителей, одновременности их работы, селективности и.тд.). Наша с Вами задача несколько проще, т.к. при разработке схем щитов силового питания и управления инженерными системами зданий, мы выбираем автоматические выключатели для коммутации и защиты цепей питания отдельных потребителей.
В инженерных системах зданий такими потребителями наиболее часто являются:
— двигатели насосов и вентиляторов;
— электрические воздухонагреватели приточных вентиляционных установок;
— электроприводная арматура;
— схемы управления и сигнализации;
— контроллеры и другие приборы;
— понижающие трансформаторы 220/36В, 220/24В.
Для каждого из этих потребителей автоматические выключатели выбираются по следующим характеристикам:
• по времени срабатывания контактов — нормальные (время срабатывания 0.02…0.1с);
• по роду тока главной цепи — переменного, постоянного и переменного;
• по числу полюсов главной цепи — одно-, двух-, трех-, четырехполюсные;
• по номинальному току — выбирается из ряда 0.5, 1, 2, 4, 6, 8, 10, 16, 20, 25, 32, 40, 50, 63, 80, 100А и т.д.;
• по виду расцепителя — комбинированный – тепловой плюс мгновенный;
• по наличию дополнительных контактов — без контактов, с контактами.
Расцепление (отключение) приводится в действие одним из двух видов расцепителей – тепловым или мгновенным. Тепловой расцепитель срабатывает при протекании через него тока выше допустимого. Это — настраиваемая величина, минимальная величина срабатывания составляет 1.45Iн (номинальный ток). Время срабатывания зависит от времятоковой характеристики выключателя и может изменяться от секунд до часа. Мгновенный расцепитель, в отличии от теплового срабатывает мгновенно, но при гораздо больших токах, составляющих от 2Iн до 20Iн. По току мгновенного расцепителя автоматические выключатели делятся на типы A, B, C и D.
Тип А срабатывает при достижении тока 2-3 номинальных значения и применяется для электропроводок большой протяженности.
Тип В срабатывает при достижении тока 3-5 номинальных значения и применяется для электропроводок в жилых зданиях.
Тип С срабатывает при достижении тока 5-10 номинальных значения и применяется для подключения двигателей.
Тип D срабатывает при достижении тока 10-20 номинальных значения и применяется для подключения двигателей.
Автоматические выключатели типа А в наших схемах не применяются. Для всех выше перечисленных потребителей, кроме асинхронных двигателей насосного и вентиляционного оборудования, приводной арматуры, нужно применять выключатели типов В или С. При этом выбор выключателей производится по номинальному току.
Асинхронные двигатели насосного и вентиляционного оборудования в момент пуска имеют пусковой ток, который может составлять до 10 номинальных значений. Конкретные значения пусковых токов двигателей приводятся в технических характеристиках оборудования. Для питания этих потребителей целесообразно выбирать пускатели типа D, которые срабатывают при токах, составляющих 10-20 значений номинального. При этом выбор выключателей также производится по номинальному току. Для таких потребителей возможно также применение выключателей типа С, но при этом пускатель выбирается с учетом пускового тока.
Учитывать пусковые токи также необходимо при выборе выключателей для питания приводной арматуры. Приводная арматура является маломощным потребителем и часто питается напряжением 24В, но при этом пусковые токи ее приводов могут быть значительными. Для примера можно привести характеристики привода BLF для противопожарных клапанов швейцарсой фирмы BELIMO. При потребляемой мощности при движении 5Вт и напряжении питания 24В, максимальный ток составляет 5.8А.
При выборе числа полюсов в наших схемах необходимо руководствоваться следующим. В цепях питания однофазных нагрузок переменным напряжением 220В устанавливаются однополюсные выключатели, коммутирующие фазу. В цепях питания трехфазных нагрузок с нулевым проводником (электронагреватели) или без него (двигатели) устанавливаются трехполюсные выключатели, коммутирующие фазные проводники. В цепях питания 24В, 36В постоянного и переменного тока устанавливаются двухполюсные выключатели.
Пускатели.
Пускатели предназначены для дистанционного управления трехфазными асинхронными двигателями и другими видами трехфазных нагрузок, например электронагревателями.
По своему конструктивному исполнению пускатели подразделяются на контактные (магнитные) и безконтактные (симисторные и др.). Магнитные пускатели применяются в тех случаях, когда управляемое ими оборудование включается/выключается не очень часто. Например, не чаще чем 1 раз в час. Для работы с часто включаемым оборудованием лучше применять бесконтактные пускатели, поскольку, в отличие от магнитных пускателей, срок их службы не зависит от количества циклов включения/выключения. Отсутствие коммутационных помех и долговечность безконтакных пускателей обеспечивает большую надежность работы оборудования. Но они имеют большую стоимость, по сравнению с магнитными пускателями.
Исходя из вышесказанного, в схемах управления инженерным оборудованием зданий для двигателей насосов и вентиляторов, для нерегулируемых секций электрических воздухонагревателей применяются магнитные пускатели, а для управления регулируемыми секциями электрических воздухонагревателей – безконтактные.
Оба типа пускателей могут быть реверсивными и нереверсивными. Реверсивные магнитные пускатели применяются для управления реверсивными двигателями, устанавливаемыми, например, в качестве приводов запорных исполнительных механизмов — приводы задвижек. Реверсивные безконтактные пускатели устанавливаются для управления регулирующими исполнительными механизмами с импульсным управлением, где в качестве приводов применены 3-х фазные реверсивные двигатели.
Сначала о магнитных пускателях.
При наличии тепловых реле магнитные пускатели могут не только осуществлять управление двигателями, но и защищать их от перегрузок недопустимой продолжительности и от токов, возникающих при обрыве одной из фаз.
Магнитные пускатели выбираются по номинальному току двигателя и рассчитаны на пусковые токи. Существует стандартный ряд пусктелей по току – 6А, 9А, 12А, 16А, 20А, 25А, 32А, 40А и т.д. Одной из характеристик магнитного пускателя является также напряжение цепи управления катушки. Напряжение цепи может быть ~24В, ~220В, ~380В.
Поставляемые к пускателям по отдельному заказу тепловые реле имеют настраиваемые диапазоны токов срабатывания. Ток срабатывания выставляется в соответствии с током на шильдике двигателя.
Следует помнить, что если цепь управления катушки пускателя коммутируется выходным контактом контроллера, то для защиты выхода контроллера от помех магнитный пускатель должен комплектоваться фильтром для защиты от помех.
Бесконтакные пускатели.
Бесконтактные пускатели осуществляют коммутацию через симисторы. Бесконтактные пускатели, используемые для управления электрическими воздухонагревателями, выбираются по рабочему току подключаемой нагрузки. Управляющим сигналом для бесконтактного пускателя может быть дискретный или аналоговый сигнал. На базе симисторных пускателей выпускаются также контроллеры, осуществляющие ПИД-регулирование электрическими воздухонагревателями. Кроме того, контроллеры осуществляют защиту электронагревателей и защиту симисторов при перегреве, формируют сигнал «авария» в схему аварийной сигнализации.
На базе бесконтактных пускателей выпускаются также устройства плавного пуска.
Поскольку при пуске двигателей возникают пусковые токи до 10-ти раз превышающие номинальные, что вызывает нагрузку на электрические сети, то по европейским нормам для двигателей мощностью свыше 4кВт необходимо устанавливать аппаратуру, облегчающую их пуск. Для двигателей, имеющих переключение обмоток ?/?, часто применяется схема с тремя магнитными пускателями, которая осуществляет это переключение, что облегчает пуск. Однако все большее применение получают устройства плавного пуска. Благодаря встроенному контроллеру, возможно осуществление различных алгоритмов управления – пуск/стоп, пусковой метод, остановочный метод. Такими устройствами осуществляется защита от аварийных режимов работы, архивация данных, диагностика неисправностей.
Частотные преобразователи.
Частотные преобразователи – это устройства, с помощью которых можно плавно или ступенчато изменять количество оборотов двигателя, т.е. изменять производительность насоса или вентилятора.
Необходимость в установке частотных преобразователей к трехфазным двигателям насосов и вентиляторов возникает в нескольких случаях:
— если установленное в технологической системе оборудование по своей производительности значительно больше требуемой;
— если в технологической системе периодически подключаются и отключаются некоторые потребители, что требует ступенчатого изменения производительности;
— если в технологической системе нужно поддерживать параметр на заданном уровне.
В первом случае в процессе наладки на частотном преобразователе устанавливаются необходимые параметры для работы насоса или вентилятора с заданной производительностью и в процессе работы эти настройки не меняются. С контроллера такой частотный преобразователь управляется дискретным сигналом «пуск/стоп».
Во втором случае, частотным преобразователь, по нескольким внешним дискретным командам, переключает оборудование с одной производительности на другую.
В третьем случае, частотный преобразователь регулирует производительность насоса или вентилятора для поддержания параметра (давление, перепад давления, расход, температура, уровень) на заданном уровне. Регулирование может осуществляться как встроенным ПИД-регулятором, так и внешним аналоговым сигналом от контроллера.
Частотные преобразователи также осуществляют функции защиты двигателя и самого преобразователя от аварийных режимов работы, архивацию данных, диагностику неисправностей.
Реле.
Электрические реле используются как пусковые устройства для однофазных двигателей и для коммутации цепей однофазного тока в схемах управления и сигнализации.
По конструкции различают электромагнитные и герконовые реле.
По начальному состоянию контактов реле подразделяются на:
— нормально замкнутые;
— нормально разомкнутые;
— переключающиеся (два устойчивых положения).
По типу управляющего тока различают реле:
— постоянного тока (нейтральные, поляризованные, комбинированные);
— переменного тока.
По напряжению и величине управляющего тока реле можно подразделить на:
— маломощные;
— средней мощности;
— мощные.
Реле могут быть без задержки срабатывания, с задержкой срабатывания и реле времени.
Специальные реле также могут быть использованы для контроля напряжения, тока, фаз, мощности, сопротивления, фотореле и дифференциальные реле.
Различают также реле по напряжению питания цепи управления – 24В, 220В. При этом надо понимать, что управляющая цепь в реле никак не связана с управляемой, т.е. реле с напряжением в цепи управления 24В своими контактами может коммутировать цепь напряжением 220В.
В схемах управления оборудованием инженерных систем зданий реле используются как аппараты, коммутирующие цепи питания однофазными электродвигателями, как промежуточные реле для усиления и размножения сигналов управления с выходов контроллеров, реле времени для включения/выключения оборудования по временным графикам работы. Широко используются реле контроля напряжения и фаз для контроля наличия питания в щитах силового питания и автоматического управления оборудованием.
Следует также помнить, что если цепь управления катушки реле коммутируется выходным контактом контроллера, то для защиты выхода контроллера от помех реле должно комплектоваться фильтром для защиты от помех, так называемой РЦ-цепью.
На этом наш урок заканчивается. Следующий урок будет посвящен регуляторам и контроллерам. Надеемся, что вновь встретимся в феврале.
Опубликованно 12-01-2009 в 15:32. Смотреть все Уроки.
Задать вопрос
или оставить свой комментарий
«Школа автоматчиков» — образовательный проект компании «РАУТ-автоматик»
Сайт разработан на основе WordPress.
Методы управления исполнительными механизмами
Инлейдинг:
В современных автомобилях имеются десятки устройств управления, отвечающих за работу как двигателя внутреннего сгорания, так и электродвигателей, а также функций комфорта и безопасности. Эти устройства управления оснащены программным обеспечением, которое обрабатывает сигналы датчиков и использует их для определения того, какими исполнительными механизмами необходимо управлять. На странице «Схемы интерфейса» глубже углубляется в процесс обработки входных и выходных сигналов ЭБУ (блоком управления).
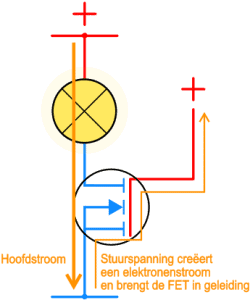
На следующем изображении мы видим ЭБУ управления двигателем посередине, датчики слева и исполнительные механизмы справа.
- Датчики посылают низкое напряжение в ЭБУ. Уровень напряжения (в диапазоне от 0 до 5 или 14 В), частота (скорость) или длительность импульса ШИМ-сигнала подает в ЭБУ информацию об измеренном значении датчика.
- В случае приводов речь идет больше о токе, чем о напряжении. Хотя для генерации тока требуется напряжение, без этого тока привод не будет работать.
На странице «Типы датчиков и сигналыВходные сигналы от датчика в ЭБУ рассмотрены подробнее. На этой странице описано управление приводами.
Управление исполнительным механизмом с помощью реле, транзистора и полевого транзистора:
Привод включается и выключается ЭБУ. В ЭБУ это делается с помощью транзистор или FET электрическое соединение установлено или разорвано.
Принцип действия транзистора равен одному реле: оба компонента управляются управляющим током, чтобы сделать их проводящими. Работа транзистора отличается от реле: в транзисторе нет движущихся частей. Транзистор переключается с электронным током.
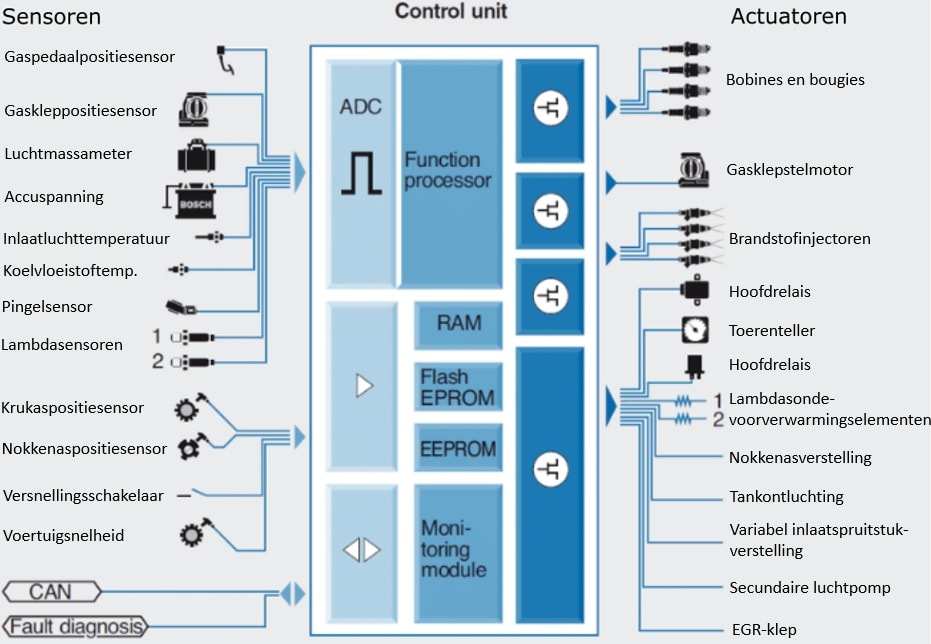
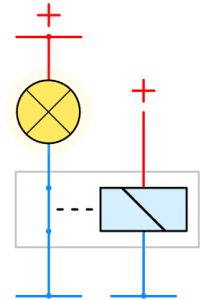
На трех изображениях ниже мы видим один релейная схема с лампой.
- Реле выключено: ток управления не течет. Катушка не является магнитной, поэтому переключатель на стороне основного тока разомкнут. Также отсутствует основной ток. Лампа выключена;
- Реле включено: катушка реле получает напряжение питания и замыкается на массу. Протекает управляющий ток, и катушка потребляет напряжение питания, чтобы стать магнитной. В результате воздействия магнитного поля выключатель в основной силовой части замыкается. Начинает течь основной ток и лампа загорается;
- Схема ситуации управляющего тока через катушку и основного тока через лампу.
В ЭБУ транзисторы и/или полевые транзисторы включаются и выключаются. На следующих трёх изображениях мы видим транзисторную схему, потребителем которой является лампа. Транзистор типа NPN.
- Транзистор не проводит ток: на базе транзистора отсутствует напряжение питания. Управляющий ток не протекает, поэтому транзистор не переключает основной ток;
- Транзистор в проводящем состоянии: на основное соединение подается напряжение питания. Ток управления протекает через базу и эмиттер на землю. Транзистор начинает проводить ток, соединяя заземляющее соединение лампы с землей схемы. Начинает течь основной ток и лампа включается;
- Схема ситуации управляющего тока через транзистор и основного тока через лампу.
![]()
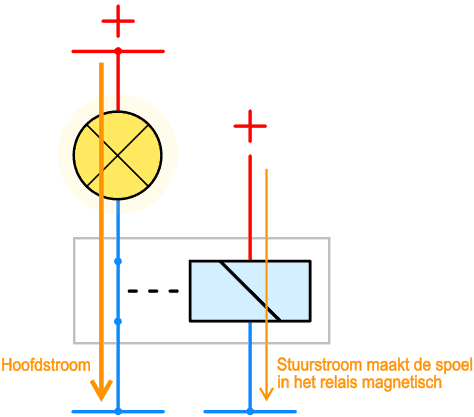
Мы все чаще видим, как полевые транзисторы используются в ЭБУ. Аббревиатура FET расшифровывается как «Полевой транзистор». Основное различие между полевым транзистором и транзистором заключается в том, что полевой транзистор включается напряжением, а транзистору требуется управляющий ток. В тот момент, когда полевой транзистор становится проводящим, начинается поток электронов. Поток электронов движется от минуса к плюсу (фактическое направление тока).
- FET не проводит ток. На затвор не подается управляющее напряжение;
- Полевой транзистор в состоянии проводимости: на затвор подается управляющее напряжение. Полевой транзистор начинает проводить ток, вызывая протекание основного тока через лампу;
- Схема ситуации, на которой мы видим направление потока электронов (от минуса к плюсу) через полевой транзистор.
Операция транзистор en FET описаны на отдельных страницах. На этой странице мы фокусируемся исключительно на принципах переключения исполнительных механизмов.
Управление исполнительным механизмом с помощью ЭБУ:
Транзистор и полевой транзистор расположены на печатной плате ЭБУ, но иногда также встроены в исполнительные механизмы. В этом разделе мы более подробно рассмотрим схемы ЭБУ для четырех различных типов приводов. На изображении мы видим два пассивных актуатора со своим плюсом и цепью массы через ЭБУ.
Пассивные приводы в большинстве случаев оснащены катушкой, которая имеет собственное напряжение питания и подключается к массе ЭБУ. Пассивный привод может иметь датчик положения, но часто он также пассивный (внешний). потенциометр), и обрабатывается по отдельному сигнальному проводу в другой части ЭБУ.
Когда ток через исполнительный механизм подается непосредственно через транзистор в ЭБУ, это называется силовым транзистором. Пассивным приводом также можно управлять через полевой транзистор.
![]()
На изображениях ниже показаны примеры управления пассивными приводами.
1. Управление катушкой зажигания: при использовании катушки зажигания без внутренних драйверов первичный ток катушки зажигания переключается на массу ЭБУ. На рисунке показан силовой транзистор в ЭБУ (2), выполненный в виде Схема Дарлингтона чтобы обеспечить больший коэффициент усиления, который переключает первичную обмотку катушки зажигания (3) на землю для зарядки первичной катушки. Вторичная катушка подключается к стороне свечи зажигания (4).
2. Управление электродвигателем: с помощью H-мост Электродвигатель с угольными щетками может вращаться в двух направлениях. H-мост может быть построен на транзисторах или полевых транзисторах, как показано на рисунке. Электродвигатель оснащен потенциометром для передачи положения обратно в ЭБУ. В число приложений могут входить: электродвигатель клапана отопителя, клапан EGR, стекло зеркала, регулировка сиденья, газовый клапан. В последнем случае он становится двойным. потенциометр применяется в целях безопасности. H-мост обычно представляет собой микросхему, установленную на печатной плате ЭБУ.