Минимальная частота для асинхронного двигателя
Имеем: приточная установка (с электродвигателем отечественного производства 18 кВт), преобразователь частоты, шкаф управления с пятипозиционным переключателем.
Задача: настроить преобразователь частоты на 5 различных скоростей (взависимости от положения переключателя на шкафу управления)
Возник вопрос: какую минимальную частоту можно поставить для первой (самой медленной) скорости?
Меня терзают сомнения: не перегреется ли двигатель?, т.е. при малых оборотах хватит ли ему охлаждения? (по документации на движок охлаждение у него IC411, т.е. самовентиляция от укрепленного на валу двигателя радиального вентилятора)
да и еще: двигатель без термоконтактов и термосопротивления
Может направите куда-нибудь, где можно почитать на эту тему
Игорь Борисов
25.12.2008, 13:14
Обычно нижнюю делают 25-30 гц, в зависимости от рекомендаций производителя двигателя.
25.12.2008, 13:48
Минимальная частота вращения по умолчанию на частотниках ставиться 10 Гц, режим засыпания. Движку ничего не будет, а вот частотнику работать в таком режиме нет смысла, кпд работы установки будет как у паровоза, поэтому их програмируют на работу с мин. частотой вращения на определенное время 5, 10мин. и частотник выключается. Следует помнить, что при 50 Гц. установка достигает мак. производительности, а при 25 Гц и половины мощности не будет. (смотри ПИ регулятора настройки)
25.12.2008, 15:18
Минимальная частота вращения по умолчанию на частотниках ставиться 10 Гц, режим засыпания. Движку ничего не будет, а вот частотнику работать .
Смысл гонять вентилятор на 10Гц?
У нас максимум достигается при 54Гц, а половина производительности при40. Все таки зависимость производительности от скорости квадратичная, и менее 25Гц как правило снижать частоту смысла нет.
(при чем тут правда ПИ регулятор и его настройки?
По поводу перегрева двигателя — тут сложнее, все таки он находиться после калорифера, и температура окружающего воздуха довольна высока, с другой стороны этот поток гораздо больше охлаждение от штатного вентилятора на валу.
Так что нужно посмотреть в реале..
25.12.2008, 15:30
Цитата(Pzotov @ 25.12.2008, 15:18) [snapback]333248[/snapback]
По поводу перегрева двигателя — тут сложнее, все таки он находиться после калорифера, и температура окружающего воздуха довольна высока, с другой стороны этот поток гораздо больше охлаждение от штатного вентилятора на валу.
Так что нужно посмотреть в реале..
Правильно ли я понимаю: дать двигателю поработать некоторое время на определенной частоте, а потом замерить температуру корпуса двигателя?
25.12.2008, 16:07
практически да. а теоритически. ведь температура окружающая и влажность и скорость воздуха будут разные в разное время суток. года. тут не угадаеь. если действительно нужно на малых частотах работать то ставтье независимый вентилятор охлаждения. но врядливаш случай. зачем вам в вентиляторе частота меньше 20 Гц ?
Сергей Долганов
25.12.2008, 16:21
По поводу перегрева двигателя — тут сложнее, все таки он находиться после калорифера, и температура окружающего воздуха довольна высока, с другой стороны этот поток гораздо больше охлаждение от штатного вентилятора на валу..
Имеем: приточная установка (с электродвигателем отечественного производства 18 кВт)
Если «отечественное» производство означает под собой совецкую приточку, то мотор вентилятора не обдувается приточным воздухом, конструктив несколько другой.
25.12.2008, 17:50
Тут ведь вот какое дело. Если вентгруппа с ремнем, то номиналка 50 Гц (ибо все шкивами подобрано). Если прямая посадка на вал, то номиналка может достигать 90+ Гц (у ВТС 93 видел не раз). Но это все лирика. А физика требует согласования расхода воздуха (т.е. теплосьема с калорифера) и Квс клапана. Зависимость расхода от частоты нелинейная, придется трубочкой Пито потыкать. Но ставить расход ниже 0,3 номинала нет смысла. Все настройки ПИД накроются медным тазом.
25.12.2008, 18:19
Тут ведь вот какое дело. Если вентгруппа с ремнем, то номиналка 50 Гц (ибо все шкивами подобрано). Если прямая посадка на вал, то номиналка может достигать 90+ Гц (у ВТС 93 видел не раз). Но это все лирика. А физика требует согласования расхода воздуха (т.е. теплосьема с калорифера) и Квс клапана. Зависимость расхода от частоты нелинейная, придется трубочкой Пито потыкать. Но ставить расход ниже 0,3 номинала нет смысла. Все настройки ПИД накроются медным тазом.
Это вообще-то не вт ему.
Вопрос о перегреве двигателя..
Приходилось применять частотники на разном оборудовании, и как правило до 25Гц снижение частоты не особенно влияет на нагрев, потому что у большинства механизмов при снижении скорости, снижается и момент на валу и естественно ток двигателя, что снижает тепловыделение..
Но есть некоторые устройства у которых момент постоянный — тут уже приходиться реализовывать независимую вентиляцию..
26.12.2008, 1:01
Если никаких данных от производителя нет, то ничего не мешает прикрепить к корпусу двигателя или обмотки статора термодатчик, и при превышении определенной температуры повысить нижний предел.
26.12.2008, 11:39
На вентиляторной нагрузке, при нормальном частотнике и его грамотной настройке можно работать как угодно долго на абсолютно любой частоте, которая требуется. Перегрева движка в этом случае не будет. Т.е. выбираем минимальную частоту исходя из реальных потребностей.
26.12.2008, 11:46
Цитата(gansales @ 26.12.2008, 11:39) [snapback]333580[/snapback]
На вентиляторной нагрузке, при нормальном частотнике и его грамотной настройке можно работать как угодно долго на абсолютно любой частоте, которая требуется. Перегрева движка в этом случае не будет. Т.е. выбираем минимальную частоту исходя из реальных потребностей.
это данные из личного опыта? (я имею ввиду, что из своего опыта пока таким образом ничего не спалил, просто хотел узнать от каких первоисточников отталкиваться при разговорах с заказчиком на эту тему)
26.12.2008, 12:19
Из личного.
Всё очень просто:
Потребляемая мощность на нагрузке (на САМОМ) вентиляторе уменьшается пропорционально кубу от оборотов (т.е. при уменьшении оборотов в два раза — требуемая мощность уменьшается в восемь раз).
Мощность потребляемая непосредственно двигателем будет в первую очередь зависеть от преобразователя и его настроек.
Если ПЧ настроен на работу с постоянным моментом, то мощность будет уменьшаться линейно — потери на двигателе будут большие.
Если взята линейная характеристика U/f (скаярный режим), то мощность уменьшается квадратично — потери до 30-40%.
Если характеристика U/f квадратичная, то мощность уменьшаетя в кубической зависимости от оборотов, НО при этом в скалярном режиме требуется иметь запас по моменту, поэтому результирующие потери составят 5-10%.
Если ПЧ работает в векторном режиме с функцией АВТМАТИЧЕСКОЙ ОПТИМИЗАЦИЕЙ ЭНЕРГОПОТРЕБЛЕНИЯ, то потери составят менее 1%.
Имеются ввиду потери только на электродвигателе за счёт различных режимов работы ПЧ, т.е. не учитываются потери на КПД ЭД, в кабеле, различных реакторах и т.п.
Обдув электродвигателя встроенным вентилятором (на валу) также уменьшается в кубической зависимости.
9.11.2012, 11:53
На вентиляторной нагрузке, при нормальном частотнике и его грамотной настройке можно работать как угодно долго на абсолютно любой частоте, которая требуется. Перегрева движка в этом случае не будет. Т.е. выбираем минимальную частоту исходя из реальных потребностей.
ПЧ ABB (серия ACS350), — номальный ПЧ ? И если ни кто не опроверг это утверждения, то я могу теоретически сказать, что могу регулировать производительностью 0-100% ?
9.11.2012, 12:16
Цитата(Auto @ 9.11.2012, 11:53)
ПЧ ABB (серия ACS350), — номальный ПЧ ? И если ни кто не опроверг это утверждения, то я могу теоретически сказать, что могу регулировать производительностью 0-100% ?
Запросто можете. Потому что с изменением скорости вращения, мощность изменяется в квадрате. Тема совершенно надуманная.
9.11.2012, 12:23
Цитата(serega @ 25.12.2008, 14:06)
Возник вопрос: какую минимальную частоту можно поставить для первой (самой медленной) скорости?
Если у вас двигатель без запаса мощности выбран, то лучше ниже 25Гц(длительно) не падать.
Khomenko_A_S
9.11.2012, 12:27
Цитата(Auto @ 9.11.2012, 12:53)
ПЧ ABB (серия ACS350), — номальный ПЧ ? И если ни кто не опроверг это утверждения, то я могу теоретически сказать, что могу регулировать производительностью 0-100% ?
Нет. Частотники регулируют не от 0, а от определенной частоты вращения
9.11.2012, 14:08
Офицальный ответ на запрос:
Да, при управлении вентилятором это возможно. Поскольку момент сопротивления в данном случае квадратично зависит от изменения скорости. Поэтому при нулевой скорости момента нагрузки на валу не будет. Соответственно, двигатель (даже если вентилятор охлаждения находится на валу) перегреваться также не будет.
Единственная проблема — дискретность изменения частоты. В скалярном режиме диапазон регулирования 10. Таким образом, шаг изменения частоты будет примерно 5 Гц (при номинальной частоте 50 Гц).
Alexander_I
9.11.2012, 14:11
Во первых, частотники — от нуля. Если, конечно, они нормальные. Во вторых — коллега чуть выше совершенно справедливо отметил: проблема надуманная, мощность при вентиляторной нагрузке при малых оборотах мизерная до неприличия, и никакого дополнительного охлаждения не требуется.
А что это за идиотский частотник, порзвольте полюбопытствовать?:
«Единственная проблема — дискретность изменения частоты. В скалярном режиме диапазон регулирования 10. Таким образом, шаг изменения частоты будет примерно 5 Гц (при номинальной частоте 50 Гц).»
Частота вращения электродвигателя
Подавляющее большинство дерево- и металлообрабатывающих станков, насосов, конвейерных лент, тельферов, кран-балок, а также другое подъемное и производственное оборудование приводится в движение электродвигателями переменного тока.
Для безаварийной работы каждого из механизмов необходима правильно подобранная мощность привода и оптимальная скорость вращения вала двигателя.
Синхронная и асинхронная частота вращения электродвигателя
Трехфазное напряжение, подаваемое на обмотки статора, генерирует в нем подвижное магнитное поле, вращающееся с постоянной скоростью. Эта величина получила название «синхронная частота вращения», так как зависит от частоты тока питающего напряжения, а также количества пар полюсов. Она рассчитывается по формуле:
Nс=f*60/p, где:
Nс-количество оборотов магнитного поля статора в минуту (об/мин)
f- частота тока в питающей сети (Гц)
60-количество секунд в минуте
p- число пар полюсовэлектродвигателя
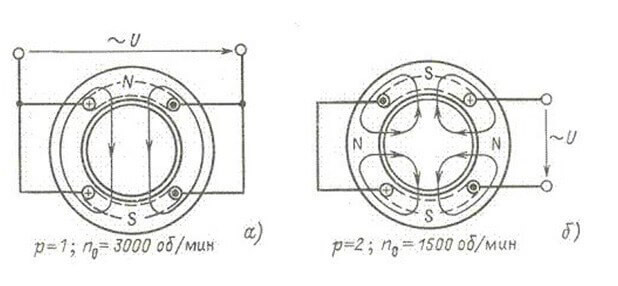
В питающих сетях с частотой тока 50 Гц максимальная синхронная скорость вращения магнитного поля статора асинхронных двигателей не может превышать значения 3000 об/мин. Такие характеристики присущи электродвигателям с одной парой полюсов, то есть таким, у которых каждая из трех обмоток имеет только по одной паре полюсов: «N» — северному и «S» — южному. Например, АИМУР 90 L2 IM1081; АИР 112 М2 IM2001; 5АИ 71 В2 IM3001 и другие.
Это обусловлено тем, что один полный оборот магнитного потока статора в каждой из обмоток совершается в течение одного периода изменения направления движения тока, то есть за 1/50 с. А значит, в минуту мы получаем те самые 3000 об/мин. С увеличением полюсов синхронная скорость уменьшается.Так, синхронная частота двигателей 5АИ 80 А4 IM1081 и 1MA6183-4BC равна 1500 об/мин, а двигателей 5АИ 355 L10 или АИР 250 S10 IM2001- всего 600 об/мин.
Фактическая (асинхронная) частота вращения вала двигателя всегда меньше ее синхронного значения. Это объясняется не только потерями на сопротивление воздуха и трением в подшипниках, но самим принципом работы асинхронных электрических машин.
Разница между этими величинами называется скольжением, выражается в процентах и рассчитывается по формуле:
s=((Nс-Nф)/Nc)*100), где
s — скольжение
Nс – синхронная скорость вращения магнитного потока статора
Nф – фактическая (асинхронная) частота
Для чего нужно знать частоту вращения вала электродвигателя
В процессе подбора привода следует следить не только за соответствием выбранной модели специфике использования и условиям эксплуатации, но и за тем, чтобы частота вращения асинхронного двигателя соответствовала мощности, необходимой для нормальной работы механизма.
Так, для подъемных механизмов (кран-балки, тельферы, лебедки, краны различных типов) высокая частота вращения ротора двигателяне нужна. На таких устройствах используются модели с синхронной скоростью от 600 до 1000 об/мин.
В тоже время особенности работы вентиляционных систем требуют, чтобы частота вращения ротора асинхронного двигателя была более высокой. Поэтому для их комплектации используются высокоскоростные электрические машины.
В зависимости от требуемых напорных характеристик и необходимой объемной подачи, насосное оборудование комплектуется двигателями с синхронной частотой вращения 1500 или 3000 об/мин.
Как определить частоту вращения двигателя
Данный параметр должен быть указан на шильдике электрической машины, также как и его мощность, КПД, схема соединения обмоток, потребляемый ток, коэффициент мощности ( cos φ ). Однако встречаются ситуации, когда информационная табличка отсутствует или ее состояние не позволяет прочитать требуемые данные.
Идеальным вариантом для определения асинхронной частоты вращения является проведение измерений с помощью механического или лазерного тахометра. Однако такие приборы редко можно найти даже на предприятиях. Определить,какая частота вращения удвигателя об/мин, можно и без дорогостоящего оборудования. Для этого достаточно вспомнить, что такое синхронная скоростьи от чего она зависит.
Чтобы найти искомый параметр, нужно узнать,сколько полюсов в двигателе. Это можно сделать простым аналоговым миллиамперметром в режиме измерения силы тока. На обесточенном двигателе, отсоединенном от приводимого механизма, снимаем крышку клеммной коробки. Находим начало и конец одной из обмотокстатора и подключаем к ним щупы прибора.
Делаем отметку на валу и начинаем его вращать в любую сторону, наблюдая за стрелкой миллиамперметра и считая количество ее отклонений от начального положения. Полученная величина укажет, сколько полюсов в испытуемом двигателе. Далее рассчитываем синхронную частоту Nс по приведенной выше формуле.
Регулирование частоты вращения двигателя
Иногда требуется изменить скорость вращения вала электрической машины. Это может понадобиться, если двигатель запускается под нагрузкой или в процессе эксплуатации необходимо кратковременно увеличить частоту вращения. Самым оптимальным вариантом можно считать включение в питающую сеть электродвигателя частотного преобразователя.
Более простым решением является установка двух или трехскоростных моделей и регулировка скорости вращения подключением разных групп обмоток. Но такой способ имеет два недостатка. Изменение скорости происходит не плавно, а ступенчато, и не может быть выполнено без остановки электродвигателя.
Если у вас не получается самостоятельно подобрать электродвигатель или вы сомневаетесь в правильности уже сделанного выбора, можно обратиться к техническим специалистам компании Кабель.РФ ® . После уточнения условий эксплуатации и назначения двигателя, они подберут оптимально подходящую марку и ее типоразмер.
Для оформления заказа позвоните менеджерам компании Кабель.РФ ® по телефону +7 (495) 646-08-58 или пришлите заявку на электронную почту zakaz@cable.ru с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей
Регулировка оборотов асинхронного двигателя
Асинхронные электродвигатели – самые распространенные электрические машины, применяемые в приводах промышленного и бытового оборудования. Главные их достоинства: относительно небольшая масса при высокой мощности, простая конструкция, низкая цена.
Рассмотрим способы регулирования частоты вращения ротора асинхронных двигателей. Теоретически скорость вала можно разгуливать несколькими способами:
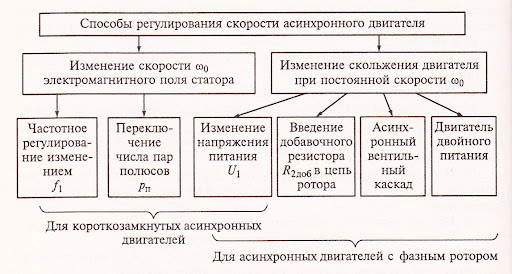
На практике чаще всего используют 2 метода:
- Изменение числа полюсов статора.
- Регулирование напряжения на обмотках статора или ротора.
- Изменение частоты питающего напряжения.
Для регулировки скорости асинхронных электрических машин также применяют механические редукторы. Рассмотрим устройство асинхронного электродвигателя и преимущества и недостатки каждого метода изменения частоты вращения.
Устройство асинхронного электродвигателя
Различают 2 основных типа асинхронных электрических машин с фазным и короткозамкнутым ротором. Конструкция последних показана на рисунке:
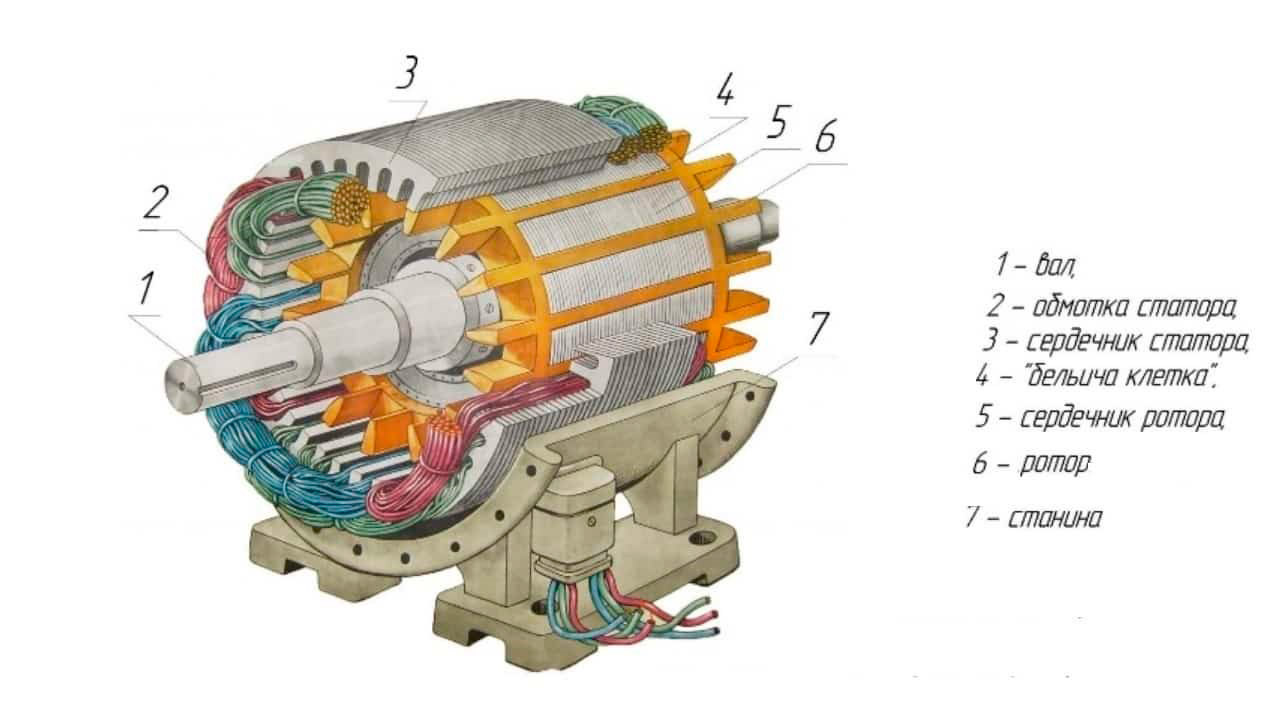
Двигатель состоит из вращающегося ротора, неподвижного статора, корпуса и станины. В статор уложена трехфазная обмотка с угловым расстоянием 120 °, соединенная по схеме «звезда» или «треугольник».
Конструкция ротора – так называемая «беличья клетка» состоит из стержней загнутых между 2 кольцами.
При подаче напряжения на обмотки статора возникает магнитное поле, которое наводит ток во вращающейся части, при взаимодействии полей ротор начинает вращаться в ту же сторону, что и магнитное поле статора. Частота вращения подвижной части несколько отстает от скорости вращения поля, эта разность называется скольжением.
Электрические машины с фазным ротором отличаются конструкций вращающейся части. В ней уложена трехфазная обмотка, соединенная по схеме «звезда» и подключенная к регулировочному реостату. Таким образом, ток в ней можно регулировать, изменяя частоту вращения и момент.

Конструкция двигателей с фазным ротором более сложная, к преимуществам таких электрических машин относят улучшенные пусковые характеристики.
Методы регулирования частоты вращения изменением числа пар полюсов и напряжения на обмотках
Частота вращения вала асинхронных двигателей определяется из формулы: n = 60f / p, где f – частота напряжения сети Гц, р – число пар полюсов статора. Таким образом, подавая напряжение на разные секции обмоток, можно изменять количество подключенных пар полюсов и регулировать скорость двигателя. К недостаткам такого метода относятся усложнение конструкции. Кроме того, регулировать скорость можно только ступенчато на число, кратное количеству пар полюсов.
Еще один метод изменения скорости двигателя – регулировка величины питающего напряжения. Он непригоден для асинхронных двигателей с коротко-замкнутым ротором, так как при снижении напряжения на обмотках статора значительно снижает жесткость механических характеристик.
Область применения такого способа – приводы с асинхронными двигателями с фазным ротором. Для регулирования напряжения в цепь ободок вращающейся части вводится реостат. Таким образом, можно плавно изменять скорость вращения вала до синхронной частоты 3000 об/мин.
К недостаткам относят значительную потерю напряжения на резистивном элементе, недостаточную эффективность при небольшой нагрузке.
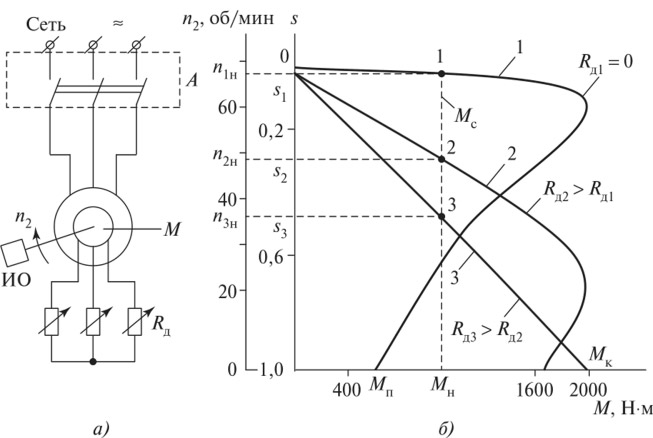
Механические характеристики при этом также ухудшаются.
Частотное регулирование скорости асинхронных двигателей
Скоростью вращения асинхронных двигателей также можно управлять путем изменения частоты питающего напряжения. С появлением быстропереключаемых транзисторов и тиристоров стало возможным применять электронные инверторы для изменения частоты напряжения, подаваемого на статор.
Такой метод лишен всех недостатков управления напряжением и обладает следующими преимуществами:
- Сохранение жесткости характеристик на любой скорости независимо от нагрузки.
- Плавное, бесступенчатое изменение скорости вращения.
- Возможность регулировки вверх и вниз от синхронной скорости.
- Небольшие габариты и масса.
Частотные преобразователи не требуют изменения конструкции электродвигателей. Они могут применяться для всех типов электрических машин переменного тока с фазным или короткозамкнутым ротором.
Различают несколько типов ПЧ и методов частотного управления. Рассмотрим наиболее распространенные типы и способы.
Виды преобразователей частоты
Одна из самых первых схем частотных преобразователей – устройства с непосредственной связью с сетью. ПЧ такого типа имеют гальваническую связь с электросетью и обычно построены на базе быстропереключаемых тиристоров. Полупроводниковые элементы включены по мостовым, перекрестным, нулевым и встречно-параллельным схемам.
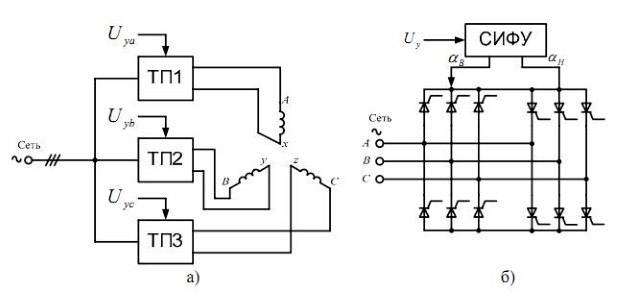
Устройства с непосредственной связью обеспечивают стабильную работу на малых скоростях двигателей, обладают высоким КПД. Преобразователи также могут обеспечивать возврат электроэнергии в сеть в режиме торможения двигателей. При необходимости мощность устройств возможно увеличить путем подключения дополнительных блоков. К недостаткам устройств относятся: несинусоидальная форма напряжения, возможность регулирования скорости только в меньшую сторону, относительная сложность схемы управления.
Наиболее распространенные в низковольтном приводе преобразователи частоты выполнены на базе схемы двойного преобразования с явно выраженным звеном постоянного тока.
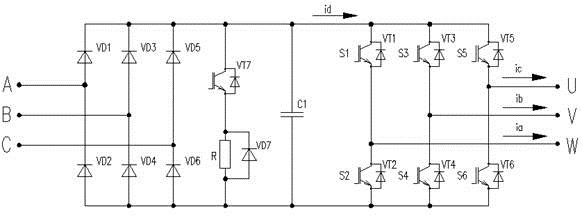
Силовая часть схемы состоит:
- Из диодного трехфазного выпрямителя. Блок обеспечивает преобразование переменного тока в постоянный.
- Из звена постоянного тока. Емкостной элемент обеспечивает фильтрацию постоянной составляющей и сглаживание пульсаций, возникающих при работе инвертора.
- Из инвертора. Функциональный блок на быстропереключаемых транзисторах преобразовывает постоянное напряжение в переменное. Частота задается алгоритмом открытия/ закрытия полупроводниковых элементов и определяется широтно-импульсным модулятором.
Схемы двойного преобразования обеспечивают чистую синусоидальную форму напряжения на выходе, позволяют управлять скоростью выше и ниже синхронной частоты, обеспечивают жесткость характеристик во всем диапазоне. К недостаткам относят некоторую потерю мощности за счет двойного преобразования электроэнергии, сложность конструкции, относительно высокую стоимость.
Заключение
Управление скоростью вращения вала частотой питающего напряжения статора – самый эффективный способ. Преобразователи частоты:
- Уменьшают пусковые токи.
- Существенно сокращают потребление электроэнергии.
- Позволяют регулировать момент при динамической нагрузке.
- Плавно регулируют частоту вращения вала в широком диапазоне.
Устройства также обеспечивают защиту от перекоса фаз, перегрузки, коротких замыканий и перепадов напряжения. Современные ПЧ также позволяют реализовать любой закон автоматического регулирования, осуществлять удаленное управление, вести журнал событий и многое другое.
Допустимая частота вращения МИН\МАКС

Зарегистрируйте новую учётную запись в нашем сообществе. Это очень просто!
Войти
Уже есть аккаунт? Войти в систему.
Последние посетители 0 пользователей онлайн
Ни одного зарегистрированного пользователя не просматривает данную страницу
- IPS Theme by IPSFocus
- Политика конфиденциальности
- Обратная связь
- Уже зарегистрированы? Войти
- Регистрация
Главная
Активность
- Создать.
Важная информация
Мы разместили cookie-файлы на ваше устройство, чтобы помочь сделать этот сайт лучше. Вы можете изменить свои настройки cookie-файлов, или продолжить без изменения настроек.