Синхронный двигатель с постоянными магнитами
Синхронный двигатель с постоянными магнитами (англ. permanent magnet synchronous motor, PMSM) — это синхронный электродвигатель, индуктор которого состоит из постоянных магнитов.
Главное отличие между синхронным двигателем с постоянными магнитами (СДПМ) и асинхронным электродвигателем заключается в роторе. Проведенные исследования 1 показывают, что СДПМ имеет КПД примерно на 2% больше, чем высоко эффективный (IE3) асинхронный электродвигатель, при условии, что статор имеет одинаковую конструкцию, а для управления используется один и тот же частотный преобразователь. При этом синхронные электродвигатели с постоянными магнитами по сравнению с другими электродвигателями обладают лучшими показателями: мощность/объем, момент/инерция и др.
Конструкции и типы синхронного электродвигателя с постоянными магнитами
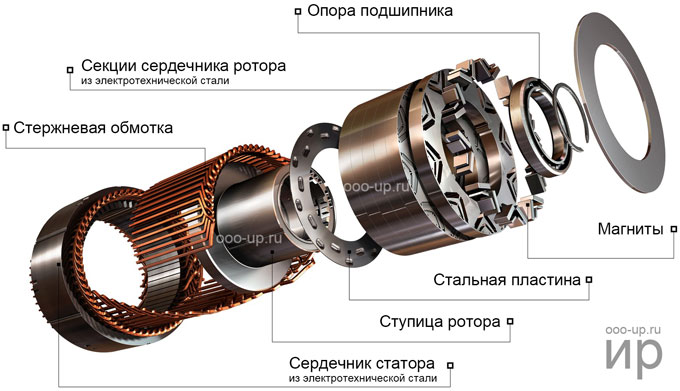
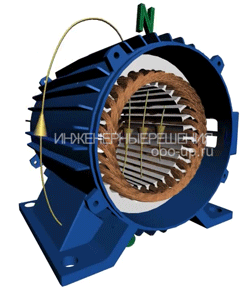
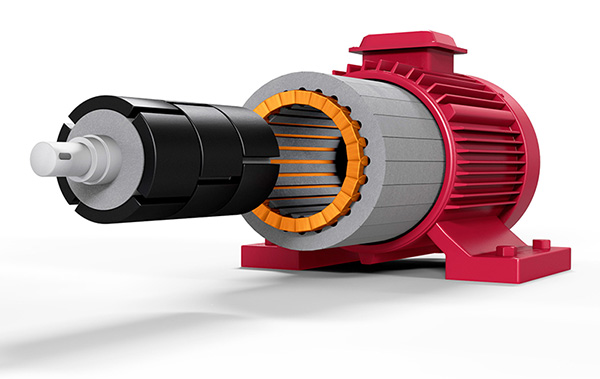
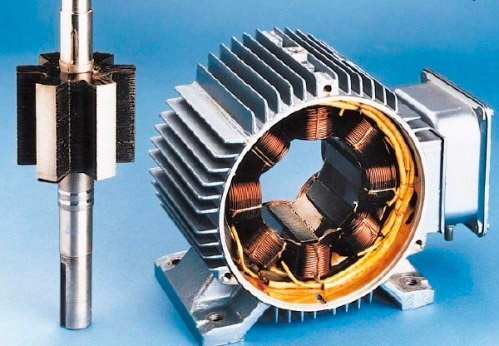
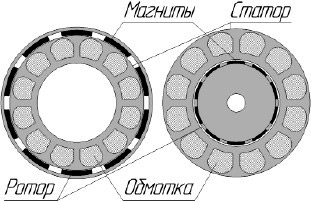
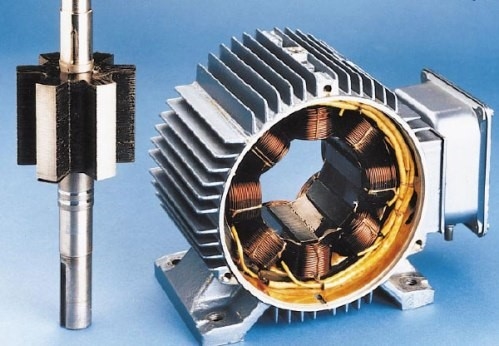
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Синхронный электродвигатель со встроенными постоянными магнитами
Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором — электродвигатели обращенного типа.
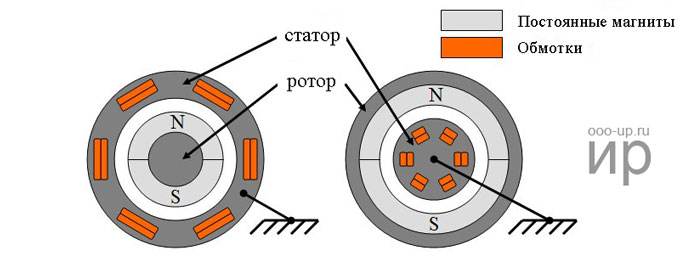
Конструкции синхронного двигателя с постоянными магнитами: слева — стандартная, справа обращенная.
Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
-
По конструкции ротора синхронные двигатели делятся на:
- электродвигатели с явно выраженными полюсами;
- электродвигатели с неявно выраженными полюсами.
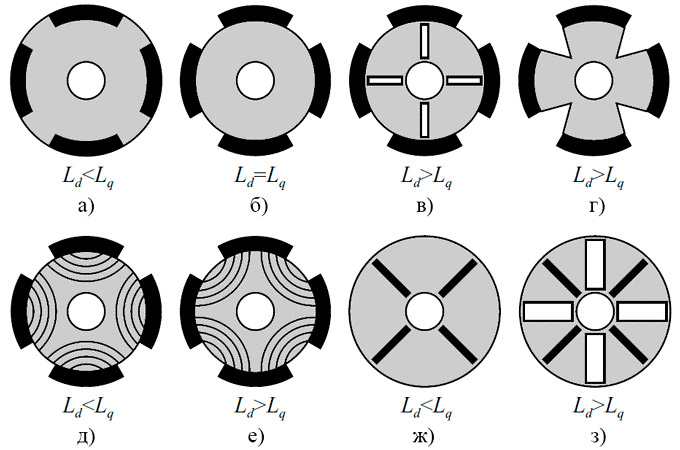
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.
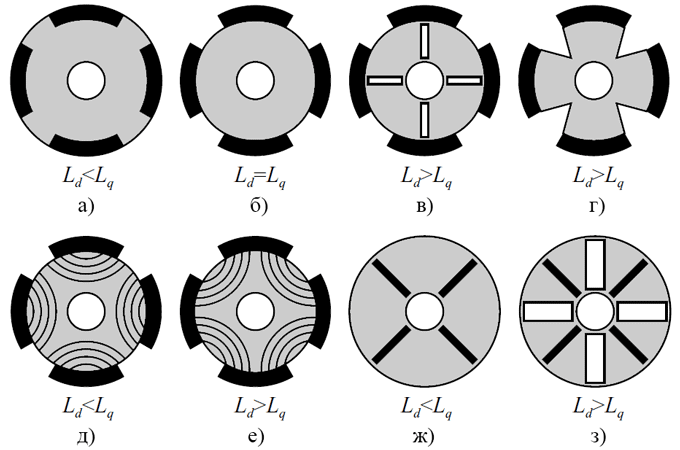
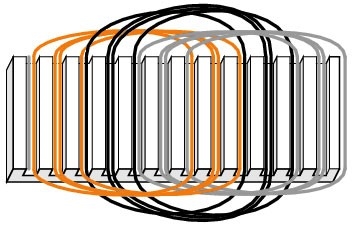
Сечение роторов с разным отношением Ld/Lq. Черным обозначены магниты. На рисунке д, е представлены аксиально-расслоенные роторы, на рисунке в и з изображены роторы с барьерами.
-
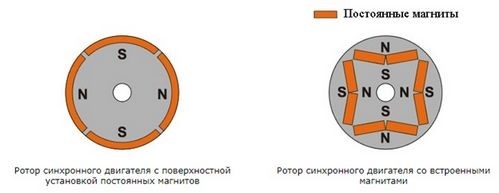
Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов
(англ. SPMSM — surface permanent magnet synchronous motor); - синхронный двигатель со встроенными (инкорпорированными) магнитами
(англ. IPMSM — interior permanent magnet synchronous motor).
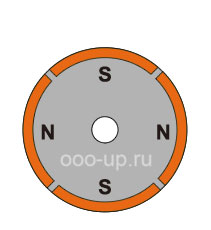
Ротор синхронного двигателя c поверхностной установкой постоянных магнитов
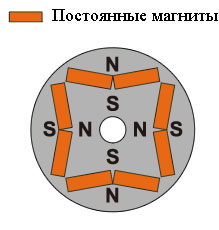
Ротор синхронного двигателя со встроенными магнитами
Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
-
В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
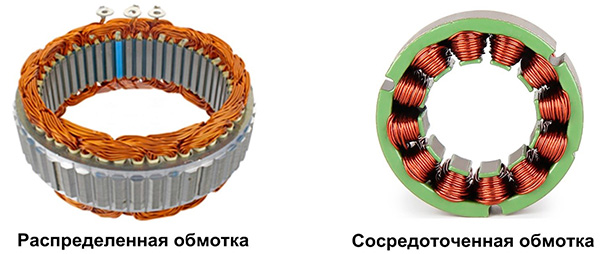
- с распределенной обмоткой;
- с сосредоточенной обмоткой.

Статор электродвигателя с распределенной обмоткой

Статор электродвигателя с сосредоточенной обмоткой
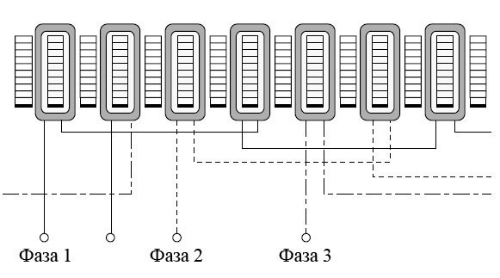
Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3. k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток — невозможность влияния на форму кривой ЭДС [2].
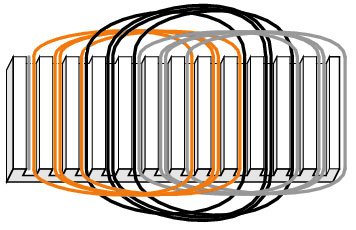
Схема трехфазной распределенной обмотки
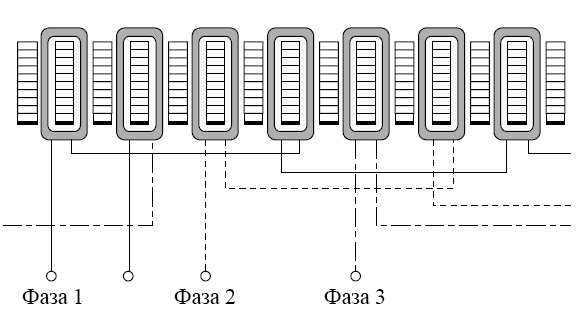
Схема трехфазной сосредоточенной обмотки
-
Форма обратной ЭДС электродвигателя может быть:
- трапецеидальная;
- синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора [2].
Принцип работы синхронного двигателя
Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Концепция вращающегося магнитного поля статора синхронного электродвигателя такая же, как и у трехфазного асинхронного электродвигателя.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора.
Остановить
Вращающееся магнитное поле синхронного электродвигателя
Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться (подробнее).
Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
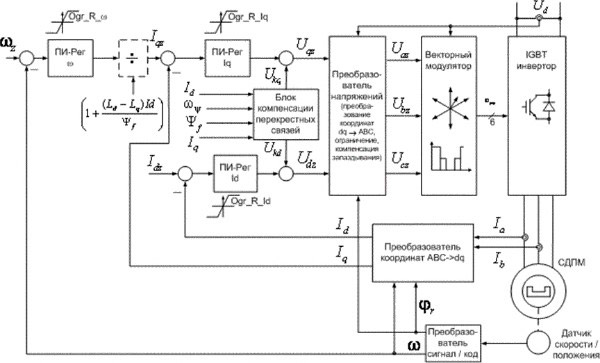
Управление синхронным двигателем с постоянными магнитами
Для работы синхронного двигателя с постоянными магнитами обязательно требуется система управления, например, частотный преобразователь или сервопривод. При этом существует большое количество способов управления реализуемых системами контроля. Выбор оптимального способа управления, главным образом, зависит от задачи, которая ставится перед электроприводом. Основные методы управления синхронным электродвигателем с постоянными магнитами приведены в таблице ниже.
| Управление | Преимущества | Недостатки | |||
|---|---|---|---|---|---|
| Синусоидальное | Скалярное | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| Векторное | Полеориентированное управление | С датчиком положения | Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования | Требуется датчик положения ротора и мощный микроконтроллер системы управления | |
| Без датчика положения | Не требуется датчик положения ротора. Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования, но меньше, чем с датчиком положения | Бездатчиковое полеориентированное управление во всем диапазоне скоростей возможно только для СДПМ с ротором с явно выраженными полюсами, требуется мощная система управления | |||
| Прямое управление моментом | Простая схема управления, хорошие динамические характеристики, большой диапазон регулирования, не требуется датчик положения ротора | Высокие пульсации момента и тока | |||
| Трапециидальное | Без обратной связи | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| С обратной связью | С датчиком положения (датчиками Холла) | Простая схема управления | Требуются датчики Холла. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | ||
| Без датчика | Требуется более мощная система управления | Не подходит для работы на низких оборотах. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | |||
Популярные способы управления синхронным двигателем с постоянными магнитами
Для решения несложных задач обычно используется трапециидальное управление по датчикам Холла (например — компьютерные вентиляторы). Для решения задач, которые требуют максимальных характеристик от электропривода, обычно выбирается полеориентированное управление.
Трапециидальное управление
Одним из простейших методов управления синхронным двигателем с постоянными магнитами является — трапецеидальное управление. Трапециидальное управление применяется для управления СДПМ с трапециидальной обратной ЭДС. При этом этот метод позволяет также управлять СДПМ с синусоидальной обратной ЭДС, но тогда средний момент электропривода будет ниже на 5%, а пульсации момента составят 14% от максимального значения. Существует трапециидальное управление без обратной связи и с обратной связью по положению ротора.
Управление без обратной связи не оптимально и может привести к выходу СДПМ из синхронизма, т.е. к потери управляемости.
-
Управление с обратной связью можно разделить на:
- трапециидальное управление по датчику положения (обычно — по датчикам Холла);
- трапециидальное управление без датчика (бездатчиковое трапециидальное управление).
В качестве датчика положения ротора при трапециидальном управлении трехфазного СДПМ обычно используются три датчика Холла встроенные в электродвигатель, которые позволяют определить угол с точностью ±30 градусов. При таком управление вектор тока статора принимает только шесть положений на один электрический период, в результате чего на выходе имеются пульсации момента.
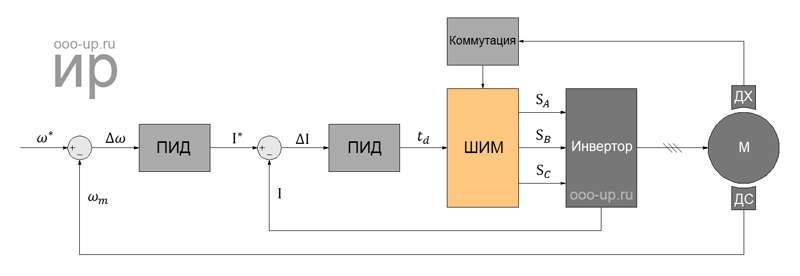
Трапециидальное управление по датчикам Холла
Полеориентированное управление
Полеориентированное управление позволяет плавно, точно и независимо управлять скоростью и моментом бесщеточного электродвигателя. Для работы алгоритма полеориентированного управления требуется знать положение ротора бесщеточного электродвигателя.
-
Существует два способа определения положения ротора:
- по датчику положения;
- без датчика — посредством вычисления угла системой управления в реальном времени на основе имеющейся информации.
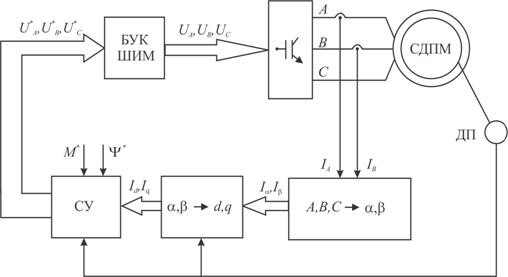
Полеориентированное управление СДПМ по датчику положения
-
В качестве датчика угла используются следующие типы датчиков:
- индуктивные: синусно-косинусный вращающийся трансформатор (СКВТ), редуктосин, индуктосин и др.;
- оптические;
- магнитные: магниторезистивные датчики.
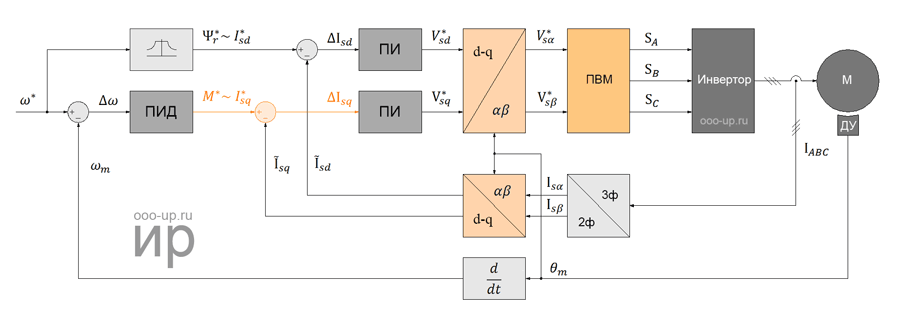
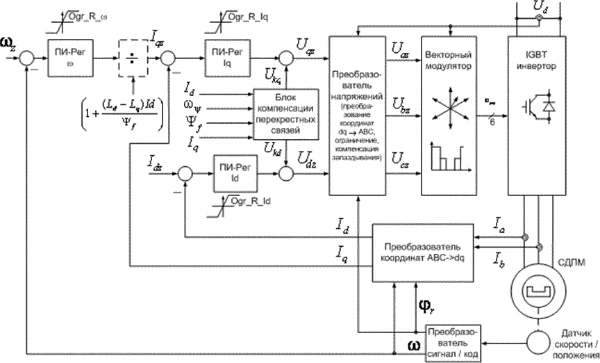
Полеориентированное управление синхронным двигателем с постоянными магнитами по датчику положения ротора
Полеориентированное управление СДПМ без датчика положения
Благодаря бурному развитию микропроцессоров с 1970-х годов начали разрабатываться бездатчиковые векторные методы управления бесщеточными электродвигателями переменного тока. Первые бездатчиковые методы определения угла были основаны на свойстве электродвигателя генерировать обратную ЭДС во время вращения. Обратная ЭДС двигателя содержит в себе информацию о положении ротора, поэтому вычислив величину обратной ЭДС в стационарной системе координат можно рассчитать положение ротора. Но, когда ротор не подвижен, обратная ЭДС отсутствует, а на низких оборотах обратная ЭДС имеет маленькую амплитуду, которую сложно отличить от шума, поэтому данный метод не подходит для определения положения ротора двигателя на низких оборотах.
-
Существует два распространенных варианта запуска СДПМ:
- запуск скалярным методом — запуск по заранее определенной характеристики зависимости напряжения от частоты. Но скалярное управление сильно ограничивает возможности системы управления и параметры электропривода в целом;
- метод наложения высокочастотного сигнала – работает только с СДПМ у которого ротор имеет явно выраженные полюса.
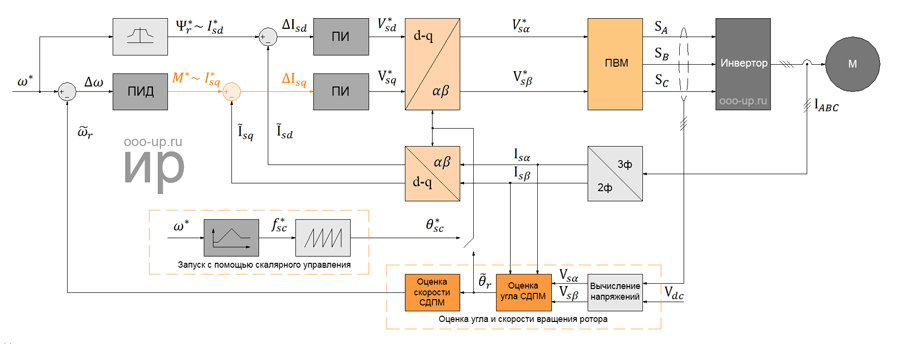
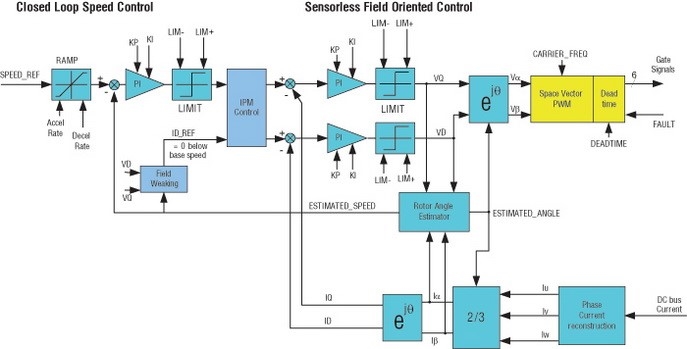
Полеориентированное управление синхронным двигателем с постоянными магнитами без датчика положения ротора со скалярным запуском
На текущий момент бездатчиковое полеориентированное управление СДПМ во всем диапазоне скоростей возможно только для двигателей с ротором с явно выраженными полюсами.
Синхронные электродвигатели на постоянных магнитах

Серия СДМ включает в себя типоразмерный ряд электродвигателей от 1,0 до 7,5 кВт. Электродвигатели серии СДМ по конструкции представляют собой трехфазные синхронные машины с возбуждением от постоянных магнитов и предназначены для применения в изделиях общепромышленной техники.
В связи с ежегодным прогнозируемым повышением цен на электроэнергию, а также ростом энергозатратных производящих отраслей нашей страны, в которых основным электропотребителем является электродвигатель, остро становится вопрос энергосбережения без потери эффективности применяемого оборудования.
Доля потребления электроэнергии оборудованием на производстве составляет 46% от общего потребления электроэнергии, из которых 80% приходится на асинхронные электродвигатели общепромышленного применения, с усредненным показателем КПД 70%.
Именно с повышением КПД применяемых электродвигателей на производстве можно существенно сократить энергозатраты без потери производительности.
Поэтому в последнее время производители электродвигателей активно продвигают энергоэффективные синхронные электродвигатели на постоянных магнитах (СДМ), КПД которых значительно выше асинхронных и находятся в пределах 95-99%.
Однако данная технология имеет еще целый ряд преимуществ, а именно:
- Работа напрямую от сети или от преобразователя частоты;
- Обеспечение высоких энергетических характеристик при недогрузке, в отличии от асинхронных двигателей(АД);
- Возможность работы СДМ без потребления и отдачи реактивной энергии в сеть. В этих условиях синхронный двигатель потребляет из сети только активный ток. Как следствие при одинаковых мощностных характеристиках синхронная машина имеет меньшие габариты и увеличенный КПД в сравнении с асинхронным электродвигателем.
- Высокая перегрузочная способность СДМ позволяет избежать перегрева обмоток статора и разрушения изоляции, даже при резком повышении нагрузки на валу электродвигателя, что в свою очередь является самой распространенной причиной выхода из строя асинхронного электродвигателя.
- Стабильная скорость вращения вала СДМ при повышении нагрузки на валу, в допустимых пределах
- Стабильность и защищенность при перепадах напряжения питающей сети.
Синхронный двигатель на постоянных магнитах (СДПМ)
СДПМ или синхронный двигатель с постоянными магнитами – подтип синхронных машин без обмоток возбуждения ротора, их роль выполняют постоянные магниты. Как и у всех синхронных электродвигателей, угловая скорость их ротора равна частоте вращающегося магнитного поля в зазоре между подвижной и неподвижной частью.
СДПМ или синхронный двигатель с постоянными магнитами – подтип синхронных машин без обмоток возбуждения ротора, их роль выполняют постоянные магниты. Как и у всех синхронных электродвигателей, угловая скорость их ротора равна частоте вращающегося магнитного поля в зазоре между подвижной и неподвижной частью.
Электрические машины такого типа обладают всеми возможностями управления двигателей постоянного тока, а также достоинствами машин переменного тока.
- Имеют больший КПД. Увеличение коэффициента полезного действия достигается за счет отсутствия потерь на возбуждение, уменьшения смягчения механической характеристики на малых оборотах.
- Обладают улучшенными массогабаритными характеристиками. Асинхронный двигатель существенно больше и тяжелее синхронных двигателей на постоянных магнитах аналогичной мощности и энергоэффективности.
- Имеют более простую конструкцию. СДПМ не имеют обмоток ротора и контактных узлов для передачи постоянного тока на вращающуюся часть.
- Обладают возможностью более точного управления. Синхронные двигатели на постоянных магнитах отличает стабильность характеристик на малых оборотах, сниженная инерция, отсутствие скольжения.
До недавнего времени широкое распространение СДПМ ограничивало отсутствие подходящих материалов для постоянных магнитов. Они должны обеспечивать создание плотного магнитного потока, обладать стойкостью к воздействию неблагоприятных факторов, к размагничиванию во всем диапазоне температур эксплуатации.
С появлением современных магнитных материалов стало возможно производство надежных СДПМ. Синхронные двигатели на постоянных магнитах широко применяют во всех отраслях, особенно в приводах автоматизированного и энергосберегающего оборудования. Рассмотрим конструкцию, способы управления, преимущества электродвигателей такого типа.
Конструкция СДПМ
Электрические машины состоят из 2 основных узлов: вращающегося (ротора) и неподвижного (статора).
Ротор расположен внутри статора, исключение – обращенные электродвигатели, где вращающаяся часть расположена снаружи.
На рисунке выше показана конструкция в разрезе стандартного СДПM (справа) и обращенного двигателя (слева).
По типу ротора различают электрические машины с выступающими и неявно выраженными полюсами. На рисунке ниже показаны варианты конструкции вращающихся узлов с явно и неявно выраженными полюсами.
Разница в конструкции – в индуктивности ротора по продольной и поперечной оси. Роторы с явно выраженными полюсами имеют различную продольную и поперечную индуктивность, вращающаяся часть электрических машин с неявно выраженными полюсами – равную индуктивность.
Неявнополюсные двигатели обычно применяют в приводах высокооборотистого оборудования, а также механизмов, где необходимо точное и плавное поддержание скорости во всех предусмотренных диапазонах. Явнополюсные электродвигатели обычно имеют большое количество пар полюсов и применяются там, где необходим большой момент на валу.
Конструкция роторов СДПМ также различается по способу установки магнитов. Их устанавливают на поверхности или встраивают в ротор.

Неподвижная часть двигателя состоит из корпуса и сердечника из электротехнической стали с обмотками. Последние бывают распределенные (слева) и сосредоточенные (справа).
Обычно СДПМ с распределенной обмоткой – машины с синусоидальной обратной ЭДС, с сосредоточенной – с трапецеидальной. На форму кривой ЭДС также влияет конструкция ротора. Вращающаяся часть с явно выраженными полюсами наводит трапецеидальную ЭДС, для ее приближения к форме «синус» полюсные наконечники выполняют скошенными.
Принцип действия и методы управления СДПМ
ринцип действия СДПМ не отличается от стандартных синхронных электрических машин. Вращение ротора осуществляется при сцеплении магнитного поля роторов с крутящимся магнитным полем, наводимым обмотками неподвижной части двигателя. Отличие – в поле вращающегося узла, оно создается не обмотками, на которые подается постоянный ток, а постоянными магнитами. При этом скольжение ротора отсутствует, его скорость равна частоте оборотов магнитного поля статора.
Запуск СДПМ не может осуществляться прямым подключением к электросети, для управления электрической машиной необходим частотный преобразователь или сервосистема. Рассмотрим базовые способы управления приводами на базе синхронных двигателей с постоянными магнитами.
Различают 2 базовых принципа управления электродвигателями такого типа: трапецеидальное (коммутацией обмоток) и синусоидальное (полеорентированное, прямое управление моментом).
Коммутация обмоток СДПМ – наиболее простой метод. За счет простоты схемы такой способ активно применяют в приводах, где не требуется особо точное управление. Различают два способа трапецеидального управления – с обратной связью и без нее. Последний метод практически не применяют в приводах с переменной нагрузкой из-за потери управления.
Регулирование момента и частоты с обратной связью реализовывается при помощи датчиков положения вала или путем вычисления угла поворота вала по уже имеющимся функциям. Такие схемы позволяют организовать достаточно точное управление, однако, обладают некоторыми недостатками:
- Требуют ввода в схему датчиков Холла или применения контроллеров большей вычислительной мощности.
- Не подходят при работе двигателя на малых оборотах.
- Не обеспечивают отсутствие пульсации момента.
Для более требовательных приводов используют полеориентированное управление. Способ позволяет плавно изменять скорость и момент на валу СДПМ. Полеориентированное управление также реализуется на базе индуктивных, оптических, магниторезистивных датчиков положения или вычислительного устройства. В последнем случае положение вала рассчитывается по величине обратной ЭДС.
Бездатчиковый способ подходит только для явнополюсных электрических машин.
Полеориентированное управление применяют в точных электроприводах, требовательных к динамическим параметрам, метод позволяет осуществлять регулирование скорости и момента в большом диапазоне. К недостаткам способа относят относительно высокую стоимость реализации.
Методы управления СДПМ выбирают, исходя из технических задач электропривода и экономической эффективности. Для оборудования с несложными алгоритмами работы обычно выбирают трапецеидальное управление с датчиками обратной связи. Приводы механизмов или устройств, работающих с переменной нагрузкой, высокими требованиями к точности, времени отработки управляющего сигнала, оснащают СДПМ с полеориентированным управлением.
Преимущества приводов на базе СДПМ
Синхронные двигатели на постоянных магнитах обладают управляемостью электрических машин постоянного тока и простотой конструкции асинхронных электродвигателей. Замена традиционно применяемых в ответственных приводах ДПС на СДПМ позволяет:
- Уменьшить затраты времени на проектно-конструкторские разработки.
- Снизить габариты электропривода.
- Отказаться от механических узлов регулирования скорости и момента.
- Уменьшить потребность в запасных частях.
- Упростить доступ к технологическому оборудованию.
- Снизить затраты на электроэнергию.
Применение синхронных силовых агрегатов на постоянных магнитах уменьшает износ фондов производства, простои, связанные с техническим обслуживанием и ремонтом. Преимущества СДПМ особенно заметны в приводах ответственного оборудования, работающего при динамических нагрузках или на низких скоростях. Электрические машины такого типа значительно повышают техническую и экономическую эффективность электроприводов.
Главные направления усовершенствования приводов на основе СДПМ
При всех достоинствах, электродвигатели синхронного типа с постоянными магнитами имеют некоторые недостатки. Один из них – высокая стоимость материалов, которые применяют в производстве магнитов. Цена СДПМ существенно выше асинхронных двигателей и соизмерима с ценой электродвигателей постоянного тока.
Одно из главных направлений усовершенствования синхронных машин с постоянными магнитами – поиск более дешевых материалов для магнитов с подходящими параметрами. То есть, с высоким остаточным намагничиванием, стойкостью к коррозии и размагничиванию во всем интервале эксплуатационных температур.
Кроме того, усовершенствование осуществляется в следующих направлениях:
- Улучшение управляемости в границах диапазона регулирования: применение подсинхронных скоростей вращения.
- Уменьшение потребляемой мощности: автоматическая подача размагничивающих токов.
- Оптимизация алгоритмов контроллеров, что позволит удешевить схему управления.
- Снижение чувствительности к помехам на малых оборотах при полеориентированном управлении без датчиков.
- Расширение возможностей СДПМ для применения в высокоточных сервоприводах путем разработки специализированных контроллеров для управления двигателями на постоянных магнитах.
- Устранение пульсаций момента на небольших скоростях.
СДПМ – современные, энергоэффективные электрические машины. Основные области их применения: микроприводы, приводы средней мощности, однако, уже есть разработки электродвигателей на постоянных магнитах более 1 МВт.
СДПМ – перспективная замена коллекторных двигателей постоянного тока в приводах оборудования, работающего динамическом режиме, а также механизмов, требовательных к точности регулирования скорости, момента или положения вала. Синхронные двигатели на постоянных магнитах также в отдельных случаях предпочтительней асинхронных двигателей с короткозамкнутым и фазным ротором.
Управление синхронным двигателем с постоянными магнитами преобразователем частоты Danfoss
Синхронные двигатели с постоянными магнитами или магнитоэлектрические машины не имеют обмоток возбуждения на роторе. Вращение осуществляется за счет взаимодействия магнитных полей обмоток статора и постоянных магнитов, размещенных на роторе электрической машины. Синхронные машины с постоянными магнитами совмещают простоту конструкции двигателей переменного тока и возможности управления ДПТ. Они обладают следующими преимуществами:
- Высокий к.п.д. во всем диапазоне частот вращения ротора, в том числе, и на пониженных скоростях.
- Простота конструкции и отсутствие потерь на возбуждение.
- Невысокая инерция при значительном моменте.
- Небольшие габариты. Например, асинхронная машина аналогичной мощности и класса энергоэффективности в 2 раза больше синхронного двигателя.
- Поддержание момента на валу, независимо от скорости вращения ротора.
Синхронные двигатели с постоянными магнитами выпускают малой и средней мощности. Их широко применяют в системах автоматики, оборудовании с высокими требованиями к стабильности частоты вращения.
К недостаткам синхронных машин относятся необходимость применения дополнительного оборудования для пуска и входа в синхронный режим, возможность размагничивания ротора при высоких температурах, необходимость установки датчиков обратной связи. Появление частотных преобразователей и современных материалов для магнитов позволило решить эти проблемы.
Конструкция электрических машин синхронного типа с постоянными магнитами
СДПМ состоит из подвижной (ротора) и неподвижной (статора) части. Исполнение ротора различается:
- По установке магнитов. Они могут размещаться на поверхности (SPMSM ) и внутри (IPMSM) вращающегося узла. Роторы со встроенными магнитами применяются в двигателях, работающих при значительной нагрузке на валу и высоких скоростях. Стоимость таких роторов существенно выше.
- По конструкции (явнополюсные и неявнополюсные роторы). Последние имеют равную индуктивность по осям горизонтальной плоскости. Роторы с явновыраженными полюсами имеют разное отношение индуктивности.
Постоянные магниты изготавливают из ферритов, сплавов редкоземельных металлов и других материалов с высокой коэрцитивной силой.
Статор синхронных электрических машин состоит из сердечника, набранного из листов электротехнической стали, и двух- или трехфазной обмотки. Различают статоры с распределенной и сосредоточенной обмоткой. Первая имеет различное положения витков в магнитном поле. Витки в сосредоточенных обмотках имеют одинаковое положение.
Сосредоточенная обмотка:
Распределенная обмотка:
Принцип работы синхронного двигателя
Принцип работы синхронных машин основан на законе Ампера. Вращающий момент появляется при взаимодействии поля ротора, образуемого постоянными магнитами, и магнитного поля обмоток статора. Синхронный двигатель не может запуститься при прямом включении в сеть. Для этого применяют:
- Запуск при помощи дополнительного двигателя. Для этого вал СДПМ соединяют с валом другой электрической машины. Такой способ дорог и практически не применяется.
- Пуск в асинхронном режиме. Роторы таких электродвигателей имеют короткозамкнутую обмотку типа “ беличья клетка”. При этом пуск происходит в асинхронном режиме. После входа в синхронизм, стержневая обмотка ротора отключается.
- Запуск при помощи частотного преобразователя. При этом ПЧ включается в цепь обмотки статора и подает на них напряжение плавно увеличивающейся частоты.
Управление синхронным двигателем с постоянными магнитами
Управление синхронными машинами осуществляется при помощи частотных преобразователей и сервоконтроллеров. Существует насколько принципов управления СДПМ. Выбор схемы осуществляется исходя из требований к электроприводу и экономической целесообразности. Наиболее распространенные схемы реализации управления синхронным электроприводом:
Скалярное
Такая схема отличатся простотой и дешевизной. При низких скоростях вращения и переменной нагрузке на валу, такой метод не подходит. При превышении нагрузки предельного момента силы на валу, электрическая машина выходит из синхронного режима и становится неуправляемой.
Векторное
Векторное управление синхронным двигателем с постоянными магнитами реализуется 3 способами:
- Полеориентированное управление с датчиком положения. Первая схема позволяет осуществлять плавное регулирование частоты вращения и момента на валу, а также задавать точное положение ротора. В качестве датчиков применяются оптические, магнитные и магниторезистивные устройства, синусно-косинусные вращающиеся трансформаторы, индуктивные энкодеры и другие устройства. Такие схемы требуют наличия контроллеров и точной настройки. Их стоимость достаточно высока. Применять схемы векторного управления имеет смысл только в претенциозных электроприводах высокоточных станков, дозаторов и т.д.
- Полеориентированное управление синхронными машинами без датчика обратной связи. Принцип определения угла поворота ротора при таком методе основан на генерации электродвигателем противо ЭДС при вращении. Вычисление ее величины позволяет определить положение ротора в стационарной системе координат. Управление без датчика не подходит при невысоких скоростях вращения, так как величина обратной ЭДС слишком мала и не превышает уровень обычных электромагнитных шумов. Кроме того, при неподвижном роторе противо ЭДС не генерируется вовсе. Схема без датчика позволяет изменять характеристики электропривода СДПМ с явнополюсным ротором. При использовании синхронных машин другого типа диапазон регулировки сильно снижается. Для этой схемы необходим процессорный управляющий блок.
- Прямое управление моментом. Такая схема обеспечивает хорошие динамические характеристики электропривода и широкий диапазон регулировки. Ограничивают ее применение значительная погрешность определения положения ротора и высокие пульсации тока статора и момента на валу. Кроме того, прямое управление создает высокую вычислительную нагрузку, для таких схем требуется мощное процессорное устройство.
Трапециидальное управление
Такая схема применяется для вентильных двигателей. Конструкция таких машин ничем не отличаются от СДПМ. Главная их особенность – принцип питания. На обмотки статора ВД подается трапециевидное напряжение. Переключение по фазам осуществляется в зависимости от угла поворота ротора.
Схемы управления ВД также бывают с датчиком и без них. В качестве устройства, обеспечивающего обратную связь, обычно используются датчики Холла. Чем больше их количество, тем точнее определяется угол поворота. Например, 3 датчика Холла позволяют определить положение ротора с точностью ±300. Бездатчиковые системы управления определяют положения по заранее известным функциям. Такие схемы применяются для решения несложных задач.
Основные направления развития контроллеров и преобразователей частоты Danfoss для СДПМ
Синхронные электродвигатели с постоянными магнитами превосходят машины постоянного тока по возможности и точности управления. Они позволяют реализовать множество схем и алгоритмов. Ведущие производители электротехники для приводов, в том числе, компания Danfoss разработали несколько линеек контроллеров и преобразователей частоты для электродвигателей такого типа. Ведутся дальнейшие разработки в следующих направлениях:
- Повышения точности отработки управляющего сигнала. Возможности изменять подсинхронные скорости вращения, определять границы динамических режимов, осуществлять регулирование во всем допустимом диапазоне.
- Снижения энергопотребления. Разрабатываются алгоритмы, оптимизирующие потребляемую СДПМ мощность путем подачи размагничивающих токов.
- Увеличения стабильности момента на малых оборотах путем устранения пульсаций.
- Упрощения алгоритмов управления, что позволит применять более дешевые контроллеры и ПЧ.
- Уменьшения количество датчиков. Безэнкодерный электропривод более надежен, однако, более чувствителен к разбросу характеристик.
- Уменьшения чувствительности привода к помехам. При усилении противо ЭДС на низких оборотах в полеориентированных схемах управления без датчика обратной связи, возрастает чувствительность к помехам.
- Создания контроллеров для использования СДПМ в качестве серводвигателей в сложных динамических системах с высокими требованиями к точности отработки команд.
Компания Danfoss может предложить технические решения управления синхронными двигателями с постоянными магнитами, отвечающими современным требованиям к электроприводу.