Способы регулирования скорости асинхронного двигателя
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
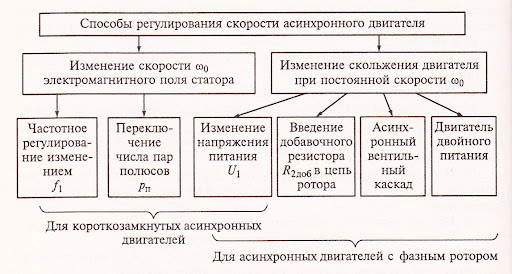
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0 и скольжением s:

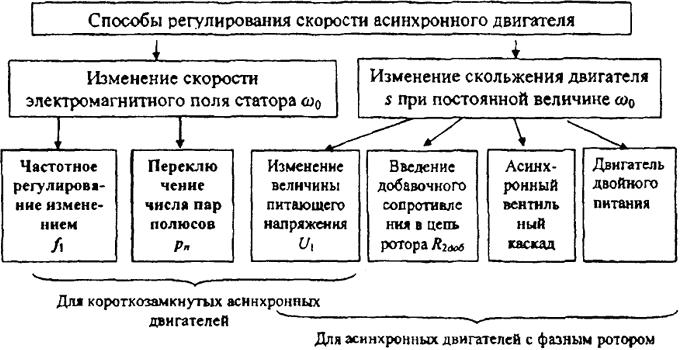
Рис.1. Классификация способов регулирования асинхронных двигателей Исходя из (1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0:
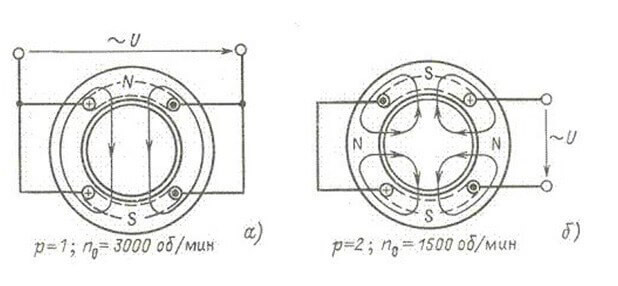
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора f1, и числом пар полюсов двигателя рп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя. Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
— экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных;
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования скорости асинхронного двигателя рассмотрены ниже.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно.
Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
2. Частотное регулирование асинхронных электроприводов:
Принципиальная возможность регулирования угловой скорости асинхронного двигателя изменением частоты питающего напряжения вытекает из формулы ω = 2π f1 (1 — s)/p. При регулировании частоты также возникает необходимость регулирования амплитуды напряжения источника, что следует из выражения U1 ≈ Е1 = kФf1. Если при неизменном напряжении изменять частоту, то поток будет изменяться обратно пропорционально частоте. Так, при уменьшении частоты поток возрастет, и это приведет к насыщению стали машины и как следствие к резкому увеличению тока и превышению температуры двигателя; при увеличении частоты поток будет уменьшаться и как следствие будет уменьшаться допустимый момент.
Для наилучшего использования асинхронного двигателя при регулировании угловой скорости изменением частоты необходимо регулировать напряжение одновременно в функции частоты и нагрузки, что реализуемо только в замкнутых системах электропривода. В разомкнутых системах напряжение регулируется лишь в функции частоты по некоторому закону, зависящему от вида нагрузки. Частотное регулирование угловой скорости электроприводов переменного тока с двигателями с короткозамкнутым ротором находит все большее применение в различных отраслях техники. Например, в установках текстильной промышленности, где с помощью одного преобразователя частоты, питающего группу асинхронных двигателей, находящихся в одинаковых условиях, плавно и одновременно регулируются их угловые скорости. Примером другой установки с частотно-регулируемыми асинхронными двигателями с короткозамкнутым ротором могут служить транспортные рольганги в металлургической промышленности, некоторые конвейеры и др.
Частотное регулирование угловой скорости асинхронных двигателей широко применяется в индивидуальных установках, когда требуется получение весьма высоких угловых скоростей (для привода электрошпинделей в металлорежущих станках с частотой вращения до 20 000 об/мин).
Экономические выгоды частотного регулирования особенно существенны для приводов, работающих в повторно-кратковременном режиме, где имеет место частое изменение направления вращения с интенсивным торможением.
Для осуществления частотного регулирования угловой скорости находят применение преобразователи, на выходе которых по требуемому соотношению или независимо меняется как частота, так и амплитуда напряжения. Преобразователи частоты можно разделить на электромашинные и вентильные. В свою очередь электромашинные преобразователи могут быть выполнены с промежуточным звеном постоянного тока и непосредственной связью. В последних используют коллекторную машину переменного тока, на вход которой подают переменное напряжение с постоянной частотой и амплитудой, а на выходе ее получают напряжение с регулируемой частотой и амплитудой. Электромашинные преобразователи с непосредственной связью практического применения не получили.
Электротехника и электрооборудование — Регулирование скорости вращения и реверсирование асинхронных электродвигателей

Регулирование скорости вращения асинхронных двигателей производят несколькими способами. Формула скорости вращения асинхронных двигателей:
(7.7) где s — скольжение в долях единицы показывает, что скорость вращения может регулироваться изменением частоты тока f, числа пар полюсов р и скольжения s.
Регулирование скорости вращения изменением величины скольжения асинхронного электродвигателя возможно двумя способами:
- введением в цепь ротора дополнительного сопротивления, что возможно для двигателей с фазным ротором;
- изменением реактивных сопротивлений (дросселей насыщения), включаемых в обмотку статора.
Регулирование скорости асинхронных электродвигателей с фазным ротором введением в его цепь дополнительного сопротивления позволяет уменьшать его скорость практически не более чем на 40—50% номинальной скорости.
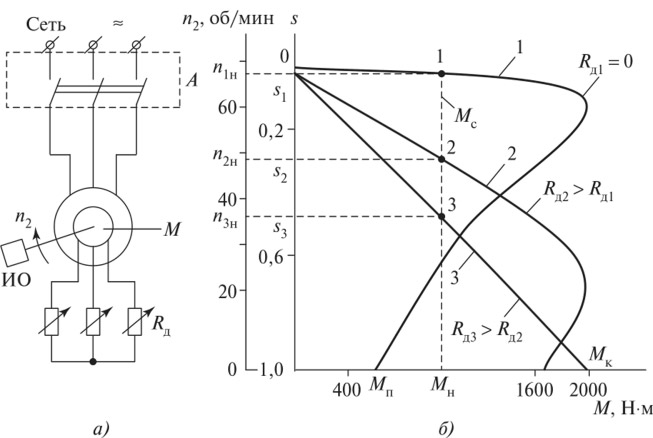
При таком регулировании с увеличением сопротивления реостата увеличивается величина скольжения, т. е. уменьшается число оборотов двигателя. В этом случае схема регулирования сходна со схемой пуска асинхронного электродвигателя с фазным ротором (см. рис.7.8) с той разницей, что регулировочный реостат должен быть рассчитай на длительную нагрузку током. Регулирование скорости с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки. Кроме того, этот способ мало экономичен, так как увеличивает потери в роторной цепи.
Описанный способ регулирования асинхронных электродвигателей с фазным ротором применяется в тех случаях, когда работа электродвигателя с пониженной скоростью непродолжительна и когда не требуется большой точности регулирования, например для регулирования скорости движения механизмов подъемно-транспортных установок.
Регулирование скорости асинхронных электродвигателей при помощи дросселей насыщения состоит в том, что в цепь статора электродвигателя включаются реактивные сопротивления с переменной индуктивностью. Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями (рис. 7.13, а).
Изменяемое индуктивное сопротивление в цепи статора электродвигателя позволяет получать на зажимах машины различное напряжение (рис. 7.13, б), чем достигается изменение скольжения, т. е. скорости вращения ротора. Достоинством описанного способа является плавное регулирование скорости вращения электродвигателя; недостатками — значительное уменьшение максимального вращающего момента, а также уменьшение коэффициента мощности и к. п. д. электродвигателя.
Регулирование скорости вращения асинхронного электродвигателя за счет изменения числа пар полюсов осуществляется переключением обмотки статора и является ступенчатым. Для этих целей применяют специальные асинхронные многоскоростные электродвигатели, выпускаемые промышленностью и рассчитанные на 2, 3 и 4 скорости. Так, например, четырех скорости ой электродвигатель может иметь синхронные скорости вращения 500, 750, 1000 и 1500 об/мин.

Рис. 7.13. Схема включения и регулирования скорости асинхронных двигателей с короткозамкнутым ротором при помощи дросселей насыщения:
а — схема включения; б — механические характеристики

Рис. 7.14. Переключение проводов для изменения направления вращения асинхронного двигателя
Изменение числа пар полюсов достигают наиболее простым способом при устройстве двух независимых обмоток на статоре асинхронного электродвигателя. Такие электродвигатели выпускают с синхронными скоростями вращения 1000/1500 об/мин.
Двухскоростные электродвигатели имеют шесть, трехскоростные— девять и четырехскоростные — двенадцать выводов к переключателю полюсов.
Регулирование скорости вращения асинхронного электродвигателя изменением частоты тока требует применения специального источника переменного тока с изменяемой частотой. Этот способ еще не нашел применения для регулирования скорости электроприводов строительных машин, но является весьма перспективным при использовании для статических преобразователей частоты управляемых, полупроводниковых вентилей-тиристоров, производство которых в настоящее время развивается (о тиристорах см. гл. 10).
Изменение направления вращения асинхронного двигателя — реверсирование достигается изменением направления вращения магнитного
поля. Для этого достаточно переключить любые два провода трехфазной системы, подводящие ток к статору двигателя. На рис. 7.14 приведена схема такого переключения. При переключении трех проводов направление вращения магнитного поля статора, а следовательно, и ротора двигателя не изменится.
§ 7.9. Потери энергии и коэффициент полезного действия асинхронных электродвигателей. Коэффициент мощности двигателей
Электрическая энергия, расходуемая при работе асинхронного электродвигателя, затрачивается на полезную механическую работу и на покрытие потерь: электрических, магнитных и механических.
Потери в меди или электрические потери обусловлены нагреванием обмоток статора и ротора при протекании по ним тока. Потери в стали (магнитные потери) состоят из потерь на вихревые токи и на перемагничивание в стальных частях статора и ротора. Потери на вихревые токи пропорциональны квадрату частоты тока, а на перемагничивание — первой степени частоты тока. Магнитные потери главным образом происходят в статоре. Потери в стали ротора ничтожно малы вследствие малой частоты его тока и поэтому ими можно пренебрегать.
Механические потери состоят из расхода энергии на трение в подшипниках, трение ротора о воздух и воздуха в вентиляционной системе электродвигателя. Эти потери зависят от скорости вращения ротора, его диаметра, типа подшипников и конструкции вентиляционной системы двигателя.
Коэффициентом полезного действия (к. п. д.) двигателя называют отношение полезной механической мощности Р3 на валу двигателя к затраченной мощности, потребляемой из сети P1  (7-8)
(7-8)
Так как разница между затраченной и полезной мощностью равна потерям, то формулу получения к. п. д. двигателя можно записать в следующем виде:  (7.9)
(7.9)
где рм — потери в меди или электрические потери; рс — потери в стали или магнитные потери;
Рмех — механические потери.
Потери в меди являются переменными, зависящими от нагрузки, вследствие того что с увеличением тока увеличивается назревание обмоток.
Потери в стали (магнитные) и механические потери являются постоянными, так как не зависят от нагрузки.
Коэффициент полезного действия двигателя изменяется в зависимости от нагрузки.
Наибольшей величины к. п. д. достигает при нагрузке, равной примерно 0,75 номинальной, а затем с увеличением нагрузки к. п. д. уменьшается вследствие увеличения электрических потерь на нагревание обмоток (рис. 7.15, а).
Большое магнитное сопротивление воздушного зазора между статором и ротором асинхронного двигателя приводит к значительной величине намагничивающего (реактивного) тока, составляющего примерно 0,4—0,7 от номинальной силы тока электродвигателя. В связи с этим двигатель всегда работает с cos φ, меньшим единицы. При полной нагрузке коэффициент мощности cos φ двигателей достигает максимальной величины 0,8—0,9 (рис. 7.15, б).
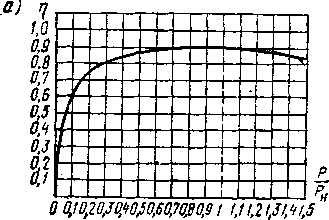
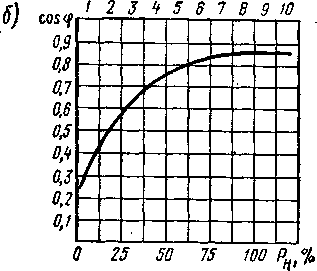
Рис. 7.15. Зависимость коэффициента мощности асинхронного двигателя от его нагрузки
С уменьшением нагрузки коэффициент мощности снижается, что объясняется малой зависимостью от нагрузки намагничивающего (реактивного) тока. Сила тока двигателя складывается из двух величин: активного тока, зависящего от нагрузки, и реактивного тока, независимого от нагрузки. Поэтому при механической недогрузке активный ток уменьшается и, следовательно, увеличивается относительная величина реактивного тока, что приводит к снижению коэффициента мощности cos φ.
Регулировка оборотов асинхронного двигателя
Асинхронные электродвигатели – самые распространенные электрические машины, применяемые в приводах промышленного и бытового оборудования. Главные их достоинства: относительно небольшая масса при высокой мощности, простая конструкция, низкая цена.
Рассмотрим способы регулирования частоты вращения ротора асинхронных двигателей. Теоретически скорость вала можно разгуливать несколькими способами:
На практике чаще всего используют 2 метода:
- Изменение числа полюсов статора.
- Регулирование напряжения на обмотках статора или ротора.
- Изменение частоты питающего напряжения.
Для регулировки скорости асинхронных электрических машин также применяют механические редукторы. Рассмотрим устройство асинхронного электродвигателя и преимущества и недостатки каждого метода изменения частоты вращения.
Устройство асинхронного электродвигателя
Различают 2 основных типа асинхронных электрических машин с фазным и короткозамкнутым ротором. Конструкция последних показана на рисунке:
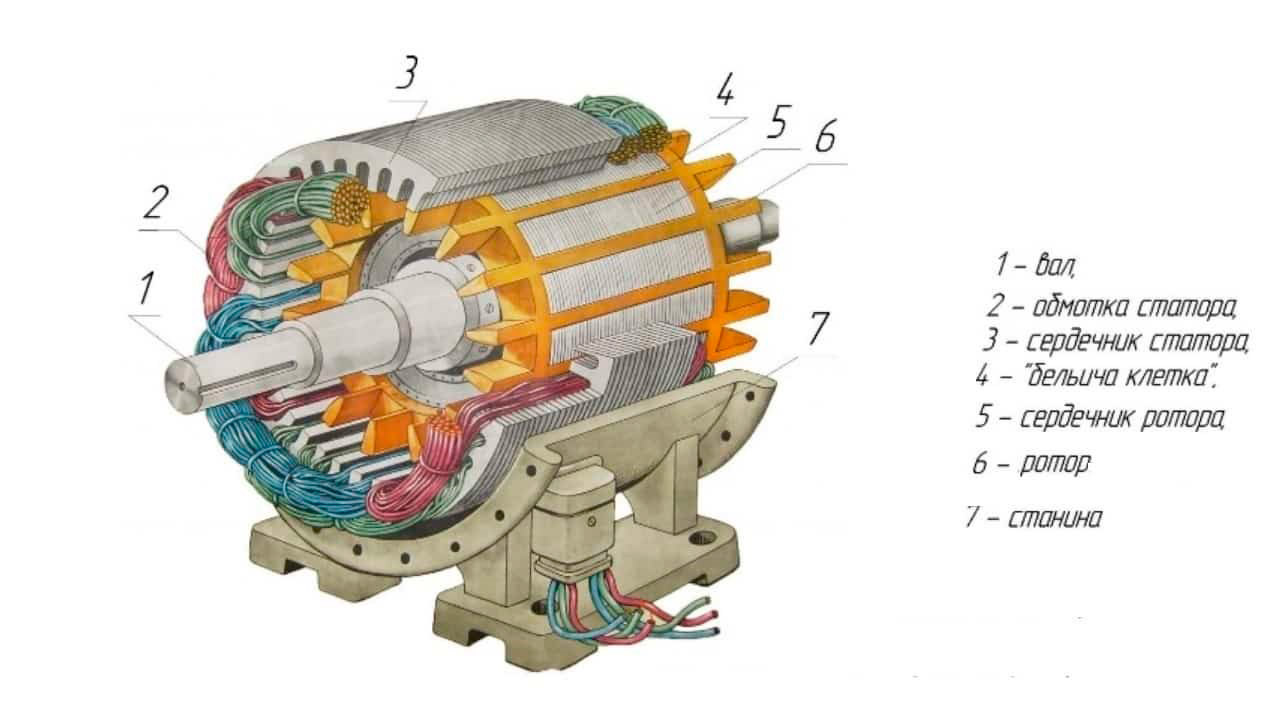
Двигатель состоит из вращающегося ротора, неподвижного статора, корпуса и станины. В статор уложена трехфазная обмотка с угловым расстоянием 120 °, соединенная по схеме «звезда» или «треугольник».
Конструкция ротора – так называемая «беличья клетка» состоит из стержней загнутых между 2 кольцами.
При подаче напряжения на обмотки статора возникает магнитное поле, которое наводит ток во вращающейся части, при взаимодействии полей ротор начинает вращаться в ту же сторону, что и магнитное поле статора. Частота вращения подвижной части несколько отстает от скорости вращения поля, эта разность называется скольжением.
Электрические машины с фазным ротором отличаются конструкций вращающейся части. В ней уложена трехфазная обмотка, соединенная по схеме «звезда» и подключенная к регулировочному реостату. Таким образом, ток в ней можно регулировать, изменяя частоту вращения и момент.

Конструкция двигателей с фазным ротором более сложная, к преимуществам таких электрических машин относят улучшенные пусковые характеристики.
Методы регулирования частоты вращения изменением числа пар полюсов и напряжения на обмотках
Частота вращения вала асинхронных двигателей определяется из формулы: n = 60f / p, где f – частота напряжения сети Гц, р – число пар полюсов статора. Таким образом, подавая напряжение на разные секции обмоток, можно изменять количество подключенных пар полюсов и регулировать скорость двигателя. К недостаткам такого метода относятся усложнение конструкции. Кроме того, регулировать скорость можно только ступенчато на число, кратное количеству пар полюсов.
Еще один метод изменения скорости двигателя – регулировка величины питающего напряжения. Он непригоден для асинхронных двигателей с коротко-замкнутым ротором, так как при снижении напряжения на обмотках статора значительно снижает жесткость механических характеристик.
Область применения такого способа – приводы с асинхронными двигателями с фазным ротором. Для регулирования напряжения в цепь ободок вращающейся части вводится реостат. Таким образом, можно плавно изменять скорость вращения вала до синхронной частоты 3000 об/мин.
К недостаткам относят значительную потерю напряжения на резистивном элементе, недостаточную эффективность при небольшой нагрузке.
Механические характеристики при этом также ухудшаются.
Частотное регулирование скорости асинхронных двигателей
Скоростью вращения асинхронных двигателей также можно управлять путем изменения частоты питающего напряжения. С появлением быстропереключаемых транзисторов и тиристоров стало возможным применять электронные инверторы для изменения частоты напряжения, подаваемого на статор.
Такой метод лишен всех недостатков управления напряжением и обладает следующими преимуществами:
- Сохранение жесткости характеристик на любой скорости независимо от нагрузки.
- Плавное, бесступенчатое изменение скорости вращения.
- Возможность регулировки вверх и вниз от синхронной скорости.
- Небольшие габариты и масса.
Частотные преобразователи не требуют изменения конструкции электродвигателей. Они могут применяться для всех типов электрических машин переменного тока с фазным или короткозамкнутым ротором.
Различают несколько типов ПЧ и методов частотного управления. Рассмотрим наиболее распространенные типы и способы.
Виды преобразователей частоты
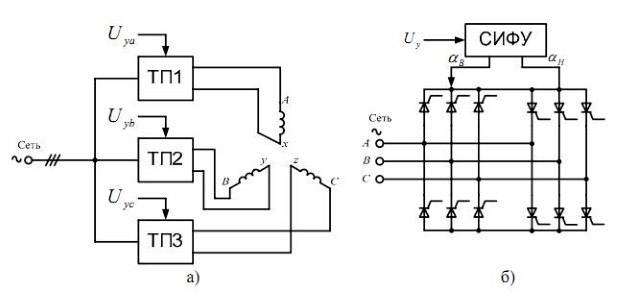
Одна из самых первых схем частотных преобразователей – устройства с непосредственной связью с сетью. ПЧ такого типа имеют гальваническую связь с электросетью и обычно построены на базе быстропереключаемых тиристоров. Полупроводниковые элементы включены по мостовым, перекрестным, нулевым и встречно-параллельным схемам.
Устройства с непосредственной связью обеспечивают стабильную работу на малых скоростях двигателей, обладают высоким КПД. Преобразователи также могут обеспечивать возврат электроэнергии в сеть в режиме торможения двигателей. При необходимости мощность устройств возможно увеличить путем подключения дополнительных блоков. К недостаткам устройств относятся: несинусоидальная форма напряжения, возможность регулирования скорости только в меньшую сторону, относительная сложность схемы управления.
Наиболее распространенные в низковольтном приводе преобразователи частоты выполнены на базе схемы двойного преобразования с явно выраженным звеном постоянного тока.
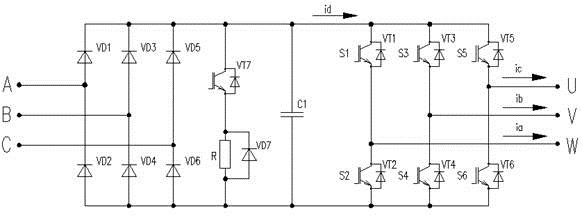
Силовая часть схемы состоит:
- Из диодного трехфазного выпрямителя. Блок обеспечивает преобразование переменного тока в постоянный.
- Из звена постоянного тока. Емкостной элемент обеспечивает фильтрацию постоянной составляющей и сглаживание пульсаций, возникающих при работе инвертора.
- Из инвертора. Функциональный блок на быстропереключаемых транзисторах преобразовывает постоянное напряжение в переменное. Частота задается алгоритмом открытия/ закрытия полупроводниковых элементов и определяется широтно-импульсным модулятором.
Схемы двойного преобразования обеспечивают чистую синусоидальную форму напряжения на выходе, позволяют управлять скоростью выше и ниже синхронной частоты, обеспечивают жесткость характеристик во всем диапазоне. К недостаткам относят некоторую потерю мощности за счет двойного преобразования электроэнергии, сложность конструкции, относительно высокую стоимость.
Заключение
Управление скоростью вращения вала частотой питающего напряжения статора – самый эффективный способ. Преобразователи частоты:
- Уменьшают пусковые токи.
- Существенно сокращают потребление электроэнергии.
- Позволяют регулировать момент при динамической нагрузке.
- Плавно регулируют частоту вращения вала в широком диапазоне.
Устройства также обеспечивают защиту от перекоса фаз, перегрузки, коротких замыканий и перепадов напряжения. Современные ПЧ также позволяют реализовать любой закон автоматического регулирования, осуществлять удаленное управление, вести журнал событий и многое другое.
Регулирование скорости асинхронного двигателя

Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов

Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
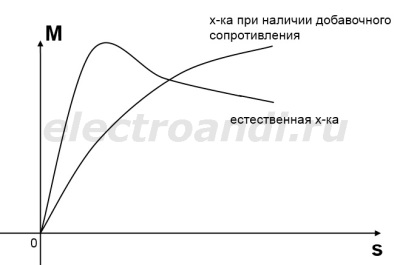
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
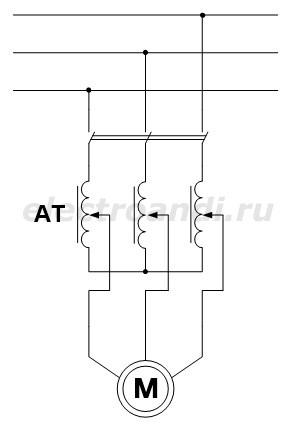
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
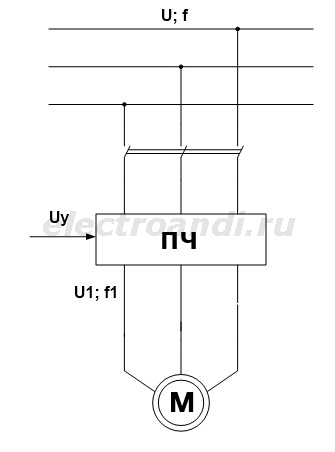
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.