Автоматическое регулирование технологических процессов
Автоматическое регулирование — это управление технологическими процессами при помощи продвинутых устройств с заранее определенными алгоритмами.
В быту, например, автоматическое регулирование может осуществляться при помощи термостата, который измеряет и поддерживает комнатную температуру на заданном уровне.

Рекомендуем обратить внимание и на другие приборы для регулирования технологических процессов.
После того, как желательная температура задана, термостат автоматически контролирует комнатную температуру и включает или отключает нагреватель или воздушный кондиционер по мере необходимости, чтобы поддержать заданную температуру.
На производстве управление процессами обычно осуществляется средствами КИП и А, которые измеряют и поддерживают на необходимом уровне технологические параметры процесса, такие как: температура, давление, уровень и расход. Ручное регулирование на более-менее масштабном производстве затруднительно по ряду причин, а многие процессы вообще невозможно регулировать вручную.
Технологические процессы и переменные процесса
Для нормального выполнения технологических процессов необходимо контролировать физические условия их протекания. Такие физические параметры, как температура, давление, уровень и расход могут изменяться по многим причинам, и их изменения влияют на технологический процесс. Эти изменяемые физические условия называются «переменными процесса».
Некоторые из них могут понизить эффективность производства и увеличить производственные затраты. Задачей системы автоматического регулирования является минимизация производственных потерь и затрат на регулирование, связанных с произвольным изменением переменных процесса.
На любом производстве осуществляется воздействие на сырьё и другие исходные компоненты для получения целевого продукта. Эффективность и экономичность работы любого производства зависит от того, как технологические процессы и переменные процесса управляются посредством специальных систем регулирования.
На тепловой электростанции, работающей на угле, уголь размалывается и затем сжигается, чтобы произвести тепло, необходимое для преобразования воды в пар. Пар может использоваться по множеству назначений: для работы паровых турбин, тепловой обработки или сушки сырых материалов. Ряд операций, которые эти материалы и вещества проходят, называется «технологическим процессом». Слово «процесс» также часто используется по отношению к индивидуальным операциям. Например, операция по размолу угля или превращения воды в пар могла бы называться процессом.
Принцип работы и элементы системы автоматического регулирования
В случае системы автоматического регулирования наблюдение и регулирование производится автоматически при помощи заранее настроенных приборов. Аппаратура способна выполнять все действия быстрее и точнее, чем в случае ручного регулирования.
Действие системы может быть разделено на две части: система определяет изменение значения переменной процесса и затем производит корректирующее воздействие, вынуждающее переменную процесса вернуться к заданному значению.
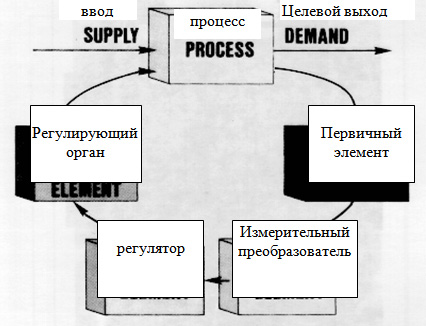
Система автоматического регулирования содержит четыре основных элемента: первичный элемент, измерительный элемент, регулирующий элемент и конечный элемент.
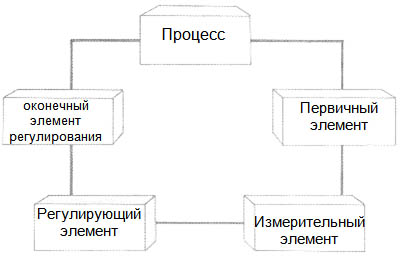
Первичный элемент воспринимает величину переменной процесса и превращает его в физическую величину, которое передается в измерительный элемент. Измерительный элемент преобразовывает физическое изменение, произведенное первичным элементом, в сигнал, представляющий величину переменной процесса.
Выходной сигнал от измерительного элемента посылается к регулирующему элементу. Регулирующий элемент сравнивает сигнал от измерительного элемента с опорным сигналом, который представляет собой заданное значение и вычисляет разницу между этими двумя сигналами. Затем регулирующий элемент производит корректирующий сигнал, который представляет собой разницу между действительной величиной переменной процесса и ее заданным значением.
Выходной сигнал от регулирующего элемента посылается к конечному элементу регулирования. Конечный элемент регулирования преобразовывает получаемый им сигнал в корректирующее воздействие, которое вынуждает переменную процесса возвратиться к заданному значению.
В дополнение к четырем основным элементам, системы регулирования процессами могут иметь вспомогательное оборудование, которое обеспечивает информацией о величине переменной процесса. Это оборудование может включать такие приборы как самописцы, измерители и устройства сигнализации.
Виды систем автоматического регулирования
Имеются два основных вида автоматических систем регулирования: замкнутые и разомкнутые, которые различаются по своим характеристикам и следовательно — по уместности применения.
Замкнутая система автоматического регулирования
В замкнутой системе информация о значении регулируемой переменной процесса проходит через всю цепочку приборов и устройств, предназначенных для контроля и регулирования этой переменной. Таким образом, в замкнутой системе производится постоянное измерение регулируемой величины, её сравнение с задающей величиной и оказывается соответствующее воздействие на процесс для приведения регулируемой величины в соответствие с задающей величиной.
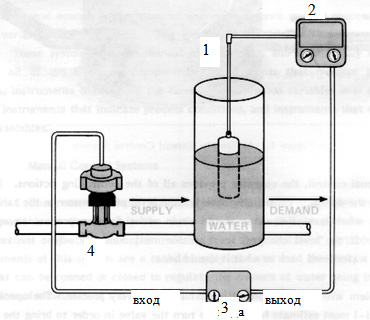
Например, подобная система хорошо подходит для контроля и поддержания необходимого уровня жидкости в резервуаре. Буек воспринимает изменение уровня жидкости. Измерительный преобразователь преобразует изменения уровня в сигнал, который отправляет на регулятор. Который, в свою очередь, сравнивает полученный сигнал с необходимым уровнем, заданным заранее. После регулятор вырабатывает корректирующий сигнал и отправляет его на регулирующий клапан, который корректирует поток воды.
Разомкнутая система автоматического регулирования
В разомкнутой системе нет замкнутой цепочки измерительных и обрабатывающих сигнал приборов и устройств от выхода до входа процесса, и воздействие регулятора на процесс не зависит от результирующего значения регулируемой переменной. Здесь не производится сравнение между текущим и желаемым значением переменной процесса и не вырабатывается корректирующее воздействие.
Один из примеров разомкнутой системы регулирования — автоматическая мойка автомобилей. Это технологический процесс по мойке автомобилей и все необходимые операции чётко определены. Когда автомобиль выходит с мойки предполагается, что он должен быть чистым. Если автомобиль недостаточно чист, то система этого не обнаруживает. Здесь нет никакого элемента, который бы давал информацию об этом и корректировал процесс.
На производстве некоторые разомкнутые системы используют таймеры, чтобы гарантировать, что ряд последовательных операций выполнен. Этот вид разомкнутого регулирования может быть приемлем, если процесс не очень ответственный. Однако, если процесс требует, чтобы выполнение некоторых условий было проверено и при необходимости были бы сделаны корректировки, разомкнутая система не приемлема. В таких ситуациях необходимо применить замкнутую систему.
Методы автоматического регулирования
Системы автоматического регулирования могут создаваться на основе двух основных методов регулирования: регулирования с обратной связью, которое работает путем исправления отклонений переменной процесса после того, как они произошли; и с воздействием по возмущению, которое предотвращает возникновение отклонений переменной процесса.
Регулирование с обратной связью
Регулирование с обратной связью — это такой способ автоматического регулирования, когда измеренное значение переменной процесса сравнивается с ее уставкой срабатывания и предпринимаются действия для исправления любого отклонения переменной от заданного значения.
Основным недостатком системы регулирования с обратной связью является то, что она не начинает регулировки процесса до тех пор, пока не произойдет отклонение регулируемой переменной процесса от значения ее уставки.
Температура должна измениться, прежде чем регулирующая система начнет открывать или закрывать управляющий клапан на линии пара. В большинстве систем регулирования такой тип регулирующего действия приемлем и заложен в конструкцию системы.
В некоторых промышленных процессах, таких как изготовление лекарственных препаратов, нельзя допустить отклонение переменной процесса от значения уставки. Любое отклонение может привести к потере продукта. В этом случае необходима система регулирования, которая бы предвосхищала изменения процесса. Такой упреждающий тип регулирования обеспечивается системой регулирования с воздействием по возмущению.
Регулирование с воздействием по возмущению
Регулирование по возмущению — это регулирование с опережением, потому что прогнозируется ожидаемое изменение в регулируемой переменной и принимаются меры прежде, чем это изменение происходит.
Это фундаментальное различие между регулированием с воздействием по возмущению и регулированием с обратной связью. Контур регулирования с воздействием по возмущению пытается нейтрализовать возмущение прежде, чем оно изменит регулируемую переменную, в то время, как контур регулирования с обратной связью пытается отрабатывать возмущение после того, как оно воздействует на регулируемую переменную.
Система регулирования с воздействием по возмущению имеет очевидное преимущество перед системой регулирования с обратной связью. При регулировании по возмущению в идеальном случае величина регулируемой переменной не изменяется, она остается на значении ее уставки. Но ручное регулирование по возмущению требует более сложного понимания того влияния, которое возмущение окажет на регулируемую переменную, а также использования более сложных и точных приборов.
На заводе редко можно встретить чистую систему регулирования по возмущению. Когда используется система регулирования по возмущению, она обычно сочетается с системой регулирования с обратной связью. И даже в этом случае регулирование по возмущению предназначается только для более ответственных операций, которые требуют очень точного регулирования.
Одноконтурные и многоконтурные системы регулирования
Одноконтурная система регулирования или простой контур регулирования — это система регулирования с одним контуром, который обычно содержит только один первичный чувствительный элемент и обеспечивает обработку только одного входного сигнала на регулятор.
Некоторые системы регулирования имеют два или больше первичных элемента и обрабатывают больше, чем один входной сигнал на регулятор. Эти системы автоматического регулирования называются «многоконтурными» системами регулирования.
Читайте также
Двухпозиционное регулирование регулирование, при котором регулирующий орган перемещается из одного крайнего положения в другое и обратно: включено или выключено
Дифференциальное регулирование выработка составляющей выходного сигнала регулятора в зависимости от скорости отклонения регулируемой переменной
Интегральное регулирование формирует регулирующее воздействие пропорционально интегралу отклонения регулируемой величины так долго, пока существует отклонение
Пропорциональное регулирование способ регулирования, при котором характеристики выходного сигнала пропорциональны характеристикам входного сигнала
Исполнительный механизм устройство, преобразующее выходной сигнал регулятора в перемещение регулирующего органа
Автоматическое регулирование

Автомати́ческое регули́рование (от нем. regulieren – регулировать, от лат. regula – норма, правило), автоматическое поддержание постоянства или изменения по заданному закону некоторой физической величины, характеризующей, как правило, производственный или технологический процесс; один из видов автоматического управления . Современные системы автоматического регулирования применяются в производственных, энергетических, транспортных, технологических и других процессах, а также в динамических системах управления не только технического характера (например, социальных).
Система автоматического регулирования представляет собой комплекс, состоящий из регулируемого объекта и регулятора (в основном включает элемент сравнения, измерительный элемент, усилитель, исполнительный элемент и корректирующие устройства). Основная характеристика автоматического регулирования – наличие в системе обратной связи . По характеру изменения задающего воздействия различают регуляторы автоматической стабилизации (поддержание значения управляемой величины постоянным, наиболее распространены в промышленной автоматике ), программного управления (изменение управляемой переменной в соответствии с заранее заданной функцией времени), следящие системы (управляемая величина воспроизводит произвольно изменяющееся задающее воздействие ; обычно используются для дистанционного управления перемещением объектов в пространстве, например для дистанционных беспилотных летательных аппаратов ); по алгоритмам функционирования – системы автоматического регулирования, действие которых основано на поиске экстремума показателя качества (управление нормальное, если оно обеспечивает удержание показателя качества в точке максимума, например настройка приёмной станции на частоту передающей по наибольшей громкости приёма), на принципе оптимального управления (применяется в технических системах для повышения эффективности производственных и технологических процессов и др.), на принципе адаптации (под влиянием внешних факторов система претерпевает существенные качественные изменения и необходимо в процессе управления изменять параметры и даже структуру системы).

Структурная схема системы автоматического регулирования. Структурная схема системы автоматического регулирования. Первыми промышленными регуляторами были автоматический поплавковый регулятор питания котла паровой машины , построенный в 1765 г. И. И. Ползуновым , и центробежный регулятор скорости паровой машины Дж. Уатта (1784). Со 2-й половины 19 в. автоматические регуляторы применялись в различных технических устройствах – паровых котлах, компрессорных установках , электрических машинах и др. Коренное изменение в методологию исследования внесли 3 фундаментальные теоретические работы, содержавшие в себе, по существу, изложение основ новой науки: работа Дж. К. Максвелла «О регуляторах» (1868) и работы И. А. Вышнеградского «Об общей теории регуляторов» (1876) и «О регуляторах прямого действия» (1877), которые осуществили системный подход к проблеме, рассмотрев регулятор и машину как единую динамическую систему. Огромный вклад в развитие теории и практики автоматического регулятора вносит Институт проблем управления.
Опубликовано 8 сентября 2023 г. в 10:53 (GMT+3). Последнее обновление 4 апреля 2024 г. в 19:58 (GMT+3). Связаться с редакцией
Информация
Области знаний: Оптимальное управление в автоматизации, Аппаратура управления машинами и технологическими процессами, Технологии робототехники
Системы автоматики: системы автоматического контроля, управления и регулирования

Все элементы автоматики по характеру и объему выполняемых операций подразделяют на системы: автоматического контроля, автоматического управления, автоматического регулирования.
Система автоматического контроля (рис. 1) предназначена для контроля за ходом какого-либо процесса. Такая система включает датчик В, усилитель А, принимающий сигнал от датчика и передающий его после усиления на специальный элемент Р, который реализует заключительную операцию автоматического контроля — представление контролируемой величины в форме, удобной для наблюдения или регистрации.
В частном случае в качестве исполнительного элемента Р могут служить сигнальные лампы или звуковые сигнализаторы. Систему с такими элементами называют системой сигнализации .

Рис. 1. Система автоматического контроля
В систему автоматического контроля кроме указанных на рис. 1, а могут входить и другие элементы — стабилизаторы, источники питания, распределители (при наличии нескольких точек контроля или нескольких датчиков в одном исполнительном элементе Р) и т. д.
Независимо от количества элементов системы автоматического контроля являются разомкнутыми и сигнал в них проходит только в одном направлении — от объекта контроля Е к исполнительному элементу Р.
Система автоматического управления предназначена для частичного или полного (без участия человека) управления объектом либо технологическим процессом. Эти системы широко применяют для автоматизации, например, процессов пуска, регулирования частоты вращения и реверсирования электродвигателей в электроприводах всех назначений.
Необходимо указать на такую важную разновидность систем автоматического управления, как системы автоматической защиты , которые не допускают аварийного или предельного режима, прерывая в критический момент контролируемый процесс.

Система автоматического регулирования поддерживает регулируемую величину в заданных пределах. Это наиболее сложные системы автоматики, объединяющие функции автоматического контроля и управления. Составная часть этих систем — регулятор .
Если системы выполняют только одну задачу — поддерживают постоянной регулируемую величину, их называют системами автоматической стабилизации. Однако существуют такие процессы, для которых необходимо изменять во времени регулируемую величину по определенному закону, обеспечивая ее стабильность на отдельных участках. В этом случае автоматическую систему называют системой программного регулирования .
Для обеспечения постоянства регулируемой величины можно использовать один из принципов регулирования — по отклонению, возмущению или комбинированный, которые будут рассмотрены применительно к системам регулирования напряжения генераторов постоянного тока.
При регулировании по отклонению (рис. 2 и 3) элемент сравнения UN сравнивает фактическое напряжение U ф с заданным Uз, определяемым задающим элементом EN. После сравнения на выходе элемента UN появляется сигнал Δ U=Uз — U ф, пропорциональный отклонению напряжения от заданного. Этот сигнал усиливается усилителем А и поступает на рабочий орган L. Изменение напряжения на рабочем органе L, которым является обмотка возбуждения генератора G, приводит к изменению фактического напряжения генератора, устраняющего его отклонение от заданного.
Усилитель А, не изменяющий принципа действия системы, необходим для ее практической реализации, когда мощность сигнала, поступающего от элемента сравнения UN, недостаточна для воздействия на рабочий орган L.
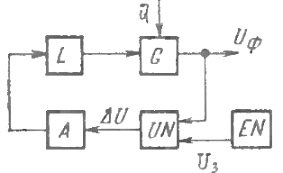
Рис. 2. Система автоматического регулирования
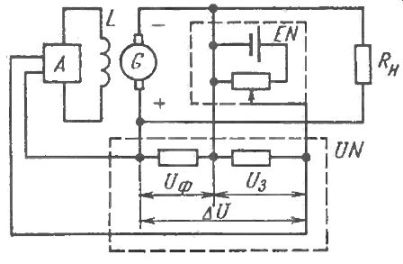
Рис. 3. Автоматическое регулирование по отклонению
Наряду с задающим воздействием на систему могут влиять различные дестабилизирующие факторы Q, которые вызывают отклонение регулируемой величины от заданной. Воздействия дестабилизирующих факторов, один из которых условно обозначен на рисунке буквой Q, могут проявляться в различных местах системы и, как принято говорить, поступать по различным каналам. Так, например, изменение температуры окружающей среды приводит к изменению сопротивления в цепи обмотки возбуждения, что в свою очередь влияет на напряжение генератора.
Однако где бы ни возникали воздействия Q (со стороны потребителя — ток нагрузки, вследствие изменения параметров цепи возбуждения), система регулирования будет реагировать на вызванное ими отклонение регулируемой величины от заданной.
Наряду с рассмотренным принципом регулирования используют регулирование по возмущению , при котором в системе предусматривают специальные элементы, измеряющие воздействия Q и влияющие на рабочий орган.
В системе, использующей только такой принцип регулирования (рис. 4 и 5), фактическое значение регулируемой величины не учитывается. Принимают во внимание только одно возмущающее воздействие — ток нагрузки I н. В соответствии с изменением тока нагрузки происходит изменение магнитодвижущей силы (мдс) обмотки возбуждения L2, являющейся измерительным элементом данной системы. Изменение мдс этой обмотки приводит к соответствующему изменению напряжения на выводах генератора.
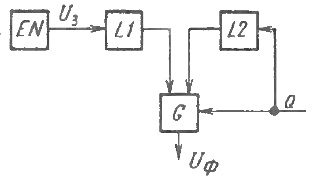
Рис. 4. Автоматическое регулирование по возмущению
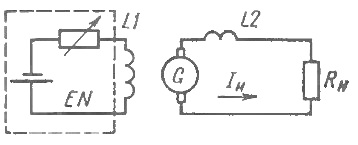
Рис. 5. Принципиальная схема системы автоматики
Система, осуществляющая комбинированное регулирование (по отклонению и возмущению), может быть получена объединением ранее рассмотренных систем в одну (рис. 6)
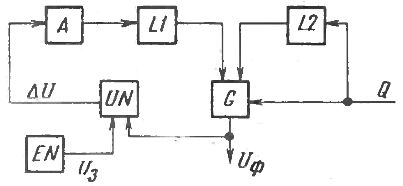
Рис. 6. Система автоматики комбинированного регулирования
В системе автоматического регулирования задающий элемент представлял собой эталон напряжения, с которым сравнивалась регулируемая величина U ф. Значение U p принято называть уставкой регулятора. В общем случае регулируемую величину обозначают буквой Y , а ее уставку Yo .
Если уставку Yo в заданных пределах оператор изменяет вручную, а регулируемой величиной является Y , система работает в режиме стабилизации. Если уставка регулятора изменяется произвольно во времени, система автоматики, поддерживая значение Δ Y = Yo — Y = 0, будет работать в следящем режиме, т. е. следить за изменением Yo .
И наконец, если уставку Yo изменять не произвольно, а по заранее известному закону (программе), система будет работать в режиме программного управления. Такие системы называют системами программного регулирования .
не имеет замкнутой цепи воздействия по регулируемой величине, поэтому ее называют разомкнутой.
Системы автоматики по принципу действия подразделяют на статические и астатические. В статических системах регулируемая величина не имеет строго постоянного значения и с увеличением нагрузки изменяется на некоторую величину, называемую ошибкой регулирования.
Рассмотренные системы (рис. 1 — 6) являются примерами простейших статических систем. Наличие ошибки регулирования в них обусловлено тем, что для обеспечения большего тока возбуждения необходимо большее отклонение напряжения.
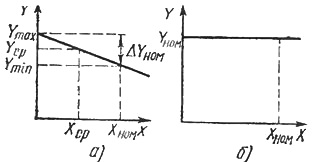
Рис. 7. Внешние характеристики систем автоматики: а — статической, б — астатисческой
Зависимость напряжения генератора от тока нагрузки в виде прямой наклонной линии показана на рис. 7, а. Наибольшее относительное отклонение напряжения от заданного называют статизмом системы по напряжению: Δ = = (Um a x — Umin)/Um a x, где (Um a x, Umin — напряжения генератора на холостом ходу и под нагрузкой. Обобщая сделанное заключение для любой статической системы, можно записать: Δ = ( Y m a x — Y min)/ Y m a x, где Y — регулируемая величина.
Иногда статизм определяют по другой формуле: Δ = ( Y m a x — Y min)/ Y ср, причем Y ср = 0,5( Y m a x + Y min) — среднерегулируемая величина Y . Статизм называют положительным, если с ростом нагрузки значение Y уменьшается, и отрицательным, если значение Y увеличивается.
В астатических системах статизм равен нулю и поэтому зависимость регулируемой величины от нагрузки представляет собой линию, параллельную оси нагрузки (рис. 7,6).
Рассмотрим, например, астатическую систему автоматики (см. рис. 8), в которой напряжение генератора регулируется изменением сопротивления реостата R , включенного в цепь обмотки возбуждения L.
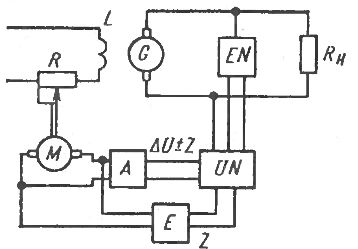
Рис. 8. Астатическая система автоматики
Серводвигатель М начинает вращаться и перемещать ползунок реостата R всякий раз, когда на входе усилителя А появляется сигнал Δ16; U об отклонении напряжения генератора U ср от заданного значения U p . Ползунок реостата перемещается до тех пор, пока сигнал об отклонении не станет равным нулю. Такая система отличается от другой системы тем, что для поддержания нового значения тока возбуждения не требуется сигнала на выходе усилителя А. Это отличие и позволяет избавиться от статизма.
Во всех ранее приведенных примерах предполагалось, что воздействие на рабочий орган производилось непрерывно в течение всего промежутка времени, пока существует отклонение регулируемой величины от заданной. Такое управление называется непрерывным , а системы — системами непрерывного действия .
Однако существуют системы, называемые дискретными, в которых воздействие на рабочий орган осуществляется с перерывами, например система регулирования температуры подошвы утюга, в которой регулирующее воздействие может принимать только одно из двух фиксированных значений при непрерывном изменении регулируемой величины — температуры.
В этой системе регулирование температуры осуществляется включением и отключением нагревательного элемента R по сигналу датчика температуры (смотрите — Базовые элементы автоматики). При увеличении температуры сверх уставки датчик размыкает свой контакт и отключает нагревательный элемент. При снижении температуры ниже уставки нагревательные элементы включаются. Эта система не имеет устойчивого промежуточного состояния рабочего органа, а он занимает лишь два положения — включено в сторону «больше» или включено в сторону «меньше».

Для обеспечения необходимого качества процесса регулирования в системе могут быть предусмотрены специальные устройства, называемые обратными связями . Эти устройства отличаются от других тем, что сигнал в них имеет направление, обратное основному управляющему сигналу.
Для примера на рис. 8 изображена обратная связь Е по отклонению регулируемой величины Δ U , соединяющая выход усилителя А со входом элемента сравнения UN. При положительной обратной связи Е на выходе элемента сравнения UN получается сумма величин Δ U и Z, а при отрицательной — их разность.
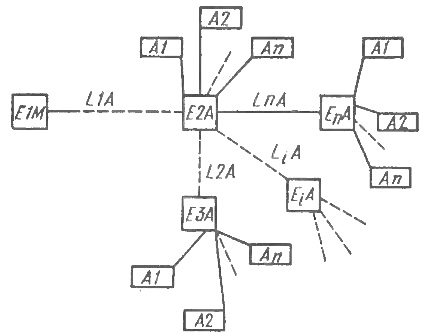
Рис. 9. Структурная схема системы телемеханики
Рассмотренные системы автоматики предполагают непосредственную связь всех входящих в них элементов. Если элементы системы автоматики расположены на значительном удалении друг от друга, для их соединения используют передатчики, каналы связи и приемники. Такие системы называют телемеханическими .
Телемеханическая система состоит из пункта управления, где находится оператор, управляющий работой системы, одного или нескольких контролируемых пунктов, на которых расположены объекты контроля A 1 — An, линий связи L1A — LnA (каналы передачи данных), соединяющих пункт управления Е1М с контролируемыми пунктами Е2А — Еn (рис. 9). В телемеханической системе по линиям связи можно передавать как все, так и некоторые виды контрольной и управляющей информации.
При передаче информации только о параметрах ОК телемеханическую систему называют с истемой телеизмерения , в которой сигналы с выходов датчиков (измерительных преобразователей, установленных на ОК) передаются на пункт управления Е1М и воспроизводятся в виде показаний стрелочных или цифровых измерительных приборов. Информация может передаваться как непрерывно, так и периодически, в том числе и по команде оператора.
Если на пункт управления передается только информация о состоянии, в котором находится тот или иной объект контроля («включен», «выключен», «исправен», «неисправен»), такую систему называют системой телесигнализации .
Телесигнализация, как и телеизмерение, выдает оператору исходные данные для принятия решения по управлению ОК или служит для выработки управляющих воздействий в системах телеуправления и телерегулировки. Основное отличие этих систем от предыдущих заключается в том, что в первой из них используются дискретные сигналы типа «включить», «выключить», а во второй — непрерывные, подобно обычным системам регулирования.
Присоединяйтесь к нашему каналу в Telegram «Автоматика и робототехника»! Узнавайте первыми о захватывающих новостях и увлекательных фактах из мира автоматизации: Автоматика и робототехника в Telegram
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Системы автоматического регулирования
Обязательным условием комфортного проживания в России на протяжении осенне-зимнего периода является эффективная и надежная система отопления. Даже в южных регионах нашей страны отопительный сезон в совокупности продолжается минимум шесть месяцев, не говоря уже о северной её части, соответственно в рамках покупки, монтажа и настройки оборудования следует учитывать и экономический фактор, а также удобство управления. Одним из оптимальных механизмов правильной реализации вышеобозначенных мероприятий является выбор в качестве базиса, систем с автоматической регулировкой. Последние имеют свои преимущества и особенности, специфику настройки, функциональность – мы обязательно рассмотрим эти аспекты ниже.
Ключевые преимущества систем автоматического управления отоплением
Современные комплексы отопления, представленные на отечественном рынке, имеют панельную или панельно-лучистую структуру. Они включают в себя радиаторные модули, теплые полы или комбинацию этих двух структур. Как и любое сложное оборудование, состоящее из множества узлов и механизмов, обозначенные изделия требуют настройки и регулярного мониторинга соответствия выставленным параметрам работы. Наиболее простым способом реализации настройки является ручная регулировка. Последняя выполняется затворами или иными подходящими компонентами встроенных насосно-смесительных узлов. При этом индикатором для определения уровня комфорта выступают собственные ощущения, степень прямого нагрева отопительных элементов, фактическая температура в помещениях.
Следует понимать, что такая реализация не обладает действительно хорошей эффективностью из-за необходимости регулярного присутствия пользователя и лишь частичного раскрытия потенциала отопительного оборудования.
- Точность. Учитываются показания приборов, а не субъективные ощущения.
- Автономность. Для осуществления процедуры не требуется оператор.
- Полное раскрытие потенциала оборудования. При правильном первичном выставлении параметров отопительные модули задействуют весь свой функционал без ручных ограничений.
- Экономия. Практика показывает, что авторегулировка сокращает расходы на поддержку работы системы и энергоносители. В зависимости от конфигурации техники показатель колеблется в пределах 15-25 процентов.
Еще одним очевидным аргументом в пользу автоматических систем регулировки является наличие встроенной защиты. Электронные датчики отслеживают текущий уровень температуры и выключают нагрев в тех ситуациях, когда фиксируется превышение выставленного порога, что продлевает срок эксплуатации отопительного оборудования и гарантирует безопасность пользователей, жилища.

Компоновка и функциональность автоматических систем управления
Непосредственное регулирование контуров реализуется через увеличение/уменьшение интенсивности работы модулей отопительной техники, что в свою очередь влияет на энергоэффективность. Параллельно формируется и комфортность применения для клиента, поскольку ему не нужно регулярно отслеживать параметры и самостоятельно корректировать их в большую/меньшую сторону.
Базовый набор автоматической системы управления (АСУ)
- Терморегулятор комнатного типа. Состоит из ряда элементов, позволяющих контролировать и поддерживать температурные показатели.
- Клеммная колодка. Предназначается для соединения модулей системы.
- Сервопривод. Непосредственно управляет клапанами регулировки.
Вспомогательным блоком для вышеобозначенного набора выступает выносной температурный датчик. Его подсоединяют к терморегулятору и могут использовать как по основному назначению, так и в качестве альтернативной конструкции, заменяющей встроенный датчик температуры воздуха.
Практически каждый современный терморегулятор имеет температурный датчик, благодаря которому основной модуль подаёт управляющий сигнал на сервопривод, выполняющий фактическую регулировку. Их простые модели применяются только для управления обогревом. Более продвинутые модификации могут использоваться в схемах реализации таймерных режимов работы, систем охлаждения и так далее.
Вышеописанная базовая схема подходит для квартир и небольших частных домов со стандартной компоновкой отопительной техники.
При более сложной схеме, когда в качестве дополнения присутствует прочее климатическое оборудование (кондиционирование, увлажнение/сушка, принудительная вентиляции и так далее), АСУ формируется в индивидуальном порядке профильным специалистом. Здесь все модули климат-контроля взаимодействуют идентично, однако основные регулировочные сигналы исходят не от терморегулятора, выступающего лишь компонентом, а базовой станции, к которой подключаются расширительные модули и прочая техника.
В подавляющем большинстве случаев для частных нужд достаточно одной такой базовой станции, эффективно справляющейся с любыми задачами АСУ по управлению температурно-влажностными показателями вплоть до 7-8 комнат.
Если жилая или коммерческая площадь более значительна, а количество помещений превышает обозначенный показатель, то необходимо несколько базовых станций, работа которых синхронизируется по индивидуально рассчитанному алгоритму.

Специфика систем управляющей автоматики
Существует два типа реализации подключения модулей АСУ – это классические кабельные линии и их беспроводные аналоги. Вторые более предпочтительны в рамках частного дома, поскольку не требуют проведения дополнительных подготовительных действия – штробления стен, косметической обработки поверхности, монтажа фальш-панелей и так далее.
При беспроводной реализации соединений системы автоматического управления доступ к регулировке со стороны пользователя осуществления через приложение для смартфонов/планшетов, интернет-браузер, соответственно использовать возможности АСУ можно в любой точке мира, если владелец имеет соответствующий гаджет и возможность применения интернета. При этом доступен не только мониторинг показателей в режиме реального времени, но и выполнение дистанционных команд.
Выводы
Системы автоматического управления отопление очень удобны и достаточно экономичны. Их использование оправдано в любых типах частной и коммерческой недвижимости. Вне зависимости от конфигурации модулей АСУ, оборудование имеет интуитивно понятный интерфейс и легко интегрируется в любой дизайн помещений.