7.4. Динамическое торможение двигателя постоянного тока независимого возбуждения
Если обмотку якоря работающего двигателя посредством переключателя К отключить от сети и замкнуть на дополнительный резистор R1 (рис. 7.13), то двигатель переходит в генераторный режим динамического торможения и снижает свою угловую скорость (рис. 7.14).
Обмотка возбуждения в процессе торможения остается присоединенной к сети постоянного тока.
Основные уравнения, характеризующие процесс динамического торможения:
сω + iR = 0; (7.42)

ci = J +Mc ,

Совместное решение этих уравнений относительноω дает:
ω = — Δωc + C , (7.43)
Постоянная интегрирования С определяется из начальных условий. При t = 0
где ω нач = ωс — угловая скорость двигателя в момент переключения с двигательного режима на динамическое тор-
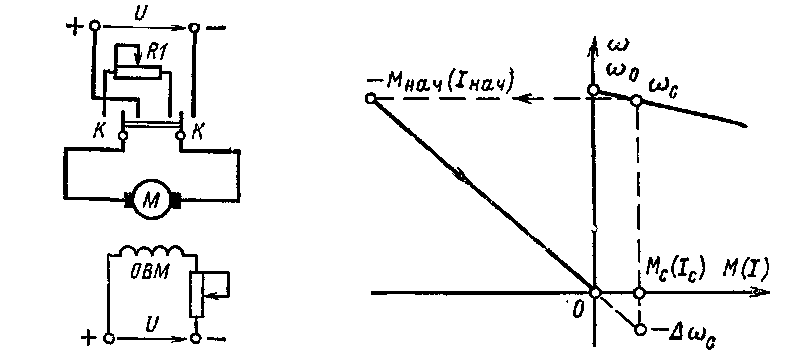
Рис. 7.13. Принципиальная схема динамического торможения двигателя постоянного тока независимого возбуждения.
Рис. 7.14. Механические характеристики двигателя постоянного тока независимого возбуждения при переходе из двигательного режима в режим динамического торможения.
можение; Δωс = McR/c 2 — абсолютное значение перепада угловой скорости, определяемое по характеристике динамического торможения при моменте нагрузки Мс (рис. 7.14). После подстановки значения С в (7.43) получим:

ω = — Δωс + (ω нач + Δωс) . (7.44)
При динамическом торможении без нагрузки (Мс = 0) Δωс = 0 и ω нач = ω0, тогда

ω= ω0 . (7.45)
На рис. 7.15, а показаны характеристики ω = f (t) при динамическом торможении в случае, когда торможение производится под нагрузкой (кривая 1) и когда Мс = 0 (кривая 2).
При торможении под нагрузкой кривая ω = f (t) асимптотически стремится к угловой скорости —Δωс, если момент нагрузки активный, например, в случае опускающегося груза в приводе крановой установки. Если момент нагрузки реактивный, то торможение электропривода закончится при угловой скорости ω = 0 (точка b).
При торможении без нагрузки кривая ω = f (t) асимптотически приближается к 0, начальная угловая скорость в атом случае ω нач = ω 0.

Рис. 7.15. Кривые ω = f (t) (а) и i = f1 (t) (б) при динамическом торможении двигателя постоянного тока независимого возбуждения.
Для определения i = f1 (t) можно воспользоваться формулой (7.8), если подставить в нее постоянную интегрирования С, соответствующую данным начальным условиям

Тогда
На рис. 7.15, б кривая 1 иллюстрирует изменение тока в цепи якоря при динамическом торможении и наличии активной нагрузки на валу двигателя, которой соответствует ток Iс. При реактивном моменте процесс закончится в точке b при ω = 0.
Кривая 2 иллюстрирует процесс динамического торможения при Мс — 0. Ток в цепи якоря для этого случая определяется по формуле
i  = –Iнач
= –Iнач  , (7.47)
, (7.47)
Абсолютное значение тока в момент переключения из двигательного режима в режим динамического торможения

Время торможения от начальной угловой скоростиωнач до текущей ω1 может быть получено из (7.44), если решить его относительно t1 т. е.

При торможении до полной остановки (ω1 = 0)
Когда Iс = 0; Δωс = 0 и теоретически время tт = ∞, практически процесс торможения можно считать законченным за время tт = 3TМ. Постоянная времени определяется аналогично тому, как это производилось в § 7.2. В данном случае учитывается суммарное сопротивление цепи якоря двигателя при динамическом торможении.
Время торможения может быть также определено на основании (7.46). Например, при торможении до полной остановки, когда i = 0, время торможения

tт = Тм1n (7.51)
Электрическое торможение двигателей постоянного тока
Во всех исполнительных механизмах, где используется электрический привод, из соображений безопасности, как правило, применяют механический и электрический способы торможения.- Механическое торможение основано на трении тормозных устройств о вращающиеся части привода, а электрическое — на создании в двигателе тормозного электромагнитного момента М, противоположного направлению вращения. Существуют три вида электрического торможения: рекуперативное, динамическое (реостатное) и противовключением.
Рекуперативное торможение. Оно является наиболее экономичным, так как основано на переводе двигателя в генераторный режим с отдачей энергии в сеть.
Двигатели параллельного или смешанного возбуждения могут автоматически переходить в режим рекуперативного торможения при частоте вращения больше п0 = U\(сеФ); характеристики продолжатся левее оси ординат, где вращающий момент является отрицательным. В этом случае ЭДС машины становится больше напряжения сети и ток, согласно, меняет свое направление.
Автоматический переход двигателя смешанного возбуждения в рекуперативный режим и его сравнительно «мягкие» механические характеристики обусловили его применение для целей электрической тяги на троллейбусах и трамваях. Можно перевести машину в рекуперативный режим и принудительно, уменьшив частоту вращения па путем увеличения тока возбуждения (значит, Ф) или снижения подводимого напряжения U.
Двигатель последовательного возбуждения таким способом не может перейти в рекуперативный режим: его характеристика на рис. 7.4 не пересекает ось ординат, а ЭДС Е никогда не может стать больше напряжения U. Дело в том, что Е — сепФу а Ф = с На электроподвижном составе двигатели последовательного возбуждения для перевода в рекуперативный режим изменением схемы включения превращают в генераторы независимого возбуждения.
Динамическое торможение.
Осуществляется путем отключения якорной обмотки от сети и замыканием ее на тормозной резистор (реостат) сопротивлением гт. При этом механическая энергия вращающихся масс преобразуется в электрическую, которая расходуется на нагрев тормозного резистора и других элементов цепи якоря.
Обмотка возбуждения двигателя параллельного возбуждения остается включенной в сеть той же полярности и, следовательно, ток возбуждения и магнитный поток остаются неизменными. Так как якорная обмотка отключена от сети, то ток, потребляемый двигателем из сети, равен нулю, но якорь двигателя по инерции продолжает вращаться, вследствие чего в нем наводится ЭДС Е = сепФ.
Тормозной ток якоря  (1)
(1)
Изменение знака тока приводит к изменению знака момента, который из вращающего становится тормозным:  (2)
(2)
Из выражения (2) видно, что при постоянном магнитном потоке Ф тормозной момент зависит от частоты вращения /г, которая вследствие торможения убывает, и от сопротивления тормозного резистора гт.
Для поддержания тормозного момента относительно постоянным тормозной резистор выполняют секционированным. По мере уменьшения частоты вращения якоря выводят секции тормозного резистора, уменьшая его сопротивление, и тем самым поддерживают ток и тормозной момент постоянными.
У двигателя последовательного возбуждения при динамическом торможении необходимо переключить выводы
обмотки возбуждения с тем, чтобы направление тока в ней а значит, и магнитного потока осталось неизменным.
Торможение противовключением.

Производится переключением выводов якорной обмотки либо обмотки возбуждения, вследствие чего изменяются направление тока в якоре либо магнитного потока и знак момента, который из вращающего превращается тормозной. Ток якоря после переключения его обмотки становится равным
т. е. он не только изменяет свой знак, но и скачком сильно увеличивается, а с ним растет и тормозной момент. Такой скачок тока и тормозного момента может оказаться опасным для машины, если сопротивление Rт мало.
Торможение противовключением обеспечивает быстрый останов двигателя. Однако при торможении этим способом двигатель должен быть своевременно отключен от сети во избежание вращения якоря в противоположном направлении (реверса). Данный способ торможения применяется в подъемно-транспортных механизмах при спуске груза и в других случаях, например для предотвращения аварийных ситуаций, опасных для жизни людей.
Судовой электрик — Способы торможения двигателей постоянного тока
§ 34. СПОСОБЫ ТОРМОЖЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Торможение применяется для сокращения времени остановки электродвигателей, а также тогда, когда это требуется по технологическому режиму для ограничения их скорости.
Различают механическое и электрическое торможение двигателей. Механическое торможение производится различными механическими тормозами — ленточными, колодочными, дисковыми и др.
На судах механическое торможение чаще всего осуществляется дисковыми тормозами постоянного (серий ТПМ и ТДП) и переменного (серий ТМС и ТМТ) тока, встраиваемыми в корпуса двигателей. Дисковые тормоза постоянного и переменного тока работают аналогично. Тормозной момент на валу электродвигателя создается силами трения, возникающими между тормозным диском и тормозной колодкой.
Разрез дискового электромагнитного тормоза показан на рис. 52. Корпус 1 тормоза непосредственно смыкается с подшипниковым щитом 9 электродвигателя. На вал электродвигателя 8 насажен тормозной диск 7, к которому сильной пружиной 3 прижимается тормозная колодка 6, служащая якорем электромагнита.

Рис. 52. Дисковый тормоз

Рис. 53. Динамическое торможение двигателей постоянного тока: а — с параллельным возбуждением; б — с последовательным возбуждением
При включении тока катушка электромагнита 2 создает сильное магнитное поле, в результате чего якорь притягивается к полюсу электромагнита 5, отпускает тормозной диск и растормаживает двигатель. Тормоз имеет рукоятку 4 для ручного растормаживания.
Электрическое торможение основано на способности электродвигателей развивать в определенных условиях не вращающие, а тормозные моменты.
Различают три вида электрического торможения: динамическое, генераторное (рекуперативное) и противовключением.
При динамическом торможении якорь двигателя отключается от сети и замыкается на тормозное сопротивление Rт (рис. 53,а). Обмотка возбуждения остается подключенной к сети, т. е. Ф=соnst. Якорь двигателя продолжает вращаться по инерции, используя кинетическую энергию рабочей машины, и в его обмотке наводится э.д.с. В замкнутом контуре цепи якоря э.д.с. создает ток с направлением, обратным по отношению к рабочему току. Момент, создаваемый этим током, становится тормозным, направленным против вращения двигателя, и двигатель остановится.
В процессе торможения скорость вращения якоря снижается, уменьшается и тормозной момент. Для сокращения времени торможения и поддержания величины убывающего тормозного момента тормозное сопротивление иногда делают секционированным. По мере уменьшения скорости вращения выключают одну за другой секции тормозного сопротивления, восстанавливая этим в известных пределах величину тока I и тормозного момента Мт.
Динамическое торможение двигателей с последовательным возбуждением возможно при самовозбуждении двигателя и при его независимом возбуждении (рис. 53,б),
Торможение с самовозбуждением в начальной стадии при значительной скорости вращения сопровождается возникновением очень больших тормозных моментов, способных вызвать механические повреждения установки, а при малых скоростях вращения машина может перестать возбуждаться и искусственный режим торможения прекратится до ее полной остановки.
Режим торможения при независимом возбуждении связан со значительным расходом энергии на возбуждение.
Динамическое торможение двигателей со смешанным возбуждением протекает так же, как и двигателей с параллельным возбуждением.
Генераторное торможение сопровождается рекуперацией (отдачей) энергии в сеть. Такой способ торможения используется для двигателей с параллельным и смешанным возбуждением. При генераторном торможении машина из двигательного режима переводится в генераторный. Это возможно, когда скорость вращения двигателя становится больше номинальной при идеальном холостом ходе. Наводимая в обмотке якоря машины э.д.с. при ω>ω0 становится больше напряжения сети (E>U) и машина переходит в генераторный режим с отдачей энергии в сеть. Направление тока изменяется, и в машине развивается тормозной момент (Мт=-М1).

У двигателей со смешанным возбуждением в генераторном режиме торможения обмотка последовательного возбуждения должна быть отключена, так как при изменении направления тока в цепи якоря двигателя последовательная обмотка будет создавать размагничивающую м.д.с.
Торможение противовключением происходит при включенном в сеть электродвигателе в том случае, когда развиваемый момент становится отрицательным по отношению к направлению вращения. Это может быть, например, если электродвигатель подъемного механизма включен на подъем груза, а его якорь под действием тяжелого груза вращается в сторону спуска.
Двигатель работает в генераторном режиме, вырабатываемая им энергия расходуется в сопротивлениях цепи.
Торможение противовключением возможно также изменением полярности подводимого к двигателю напряжения (переключением концов питающей сети). Двигатель за счет запасенной кинетической энергии продолжает вращаться в прежнем направлении. Направление тока в обмотке якоря изменяется, соответственно изменяется и направление момента, который теперь становится тормозным. Если двигатель не будет отключен от сети, он начнет вращаться в обратную сторону.
В обоих случаях э.д.с., наводимая в обмотке якоря, сохраняет свое направление, а напряжение сети оказывается включенным согласно с э.д.с. В результате
Увеличение напряжения почти вдвое, особенно в начале торможения, требует введения в цепь якоря тормозного сопротивления Rt, так как значение тока достигает недопустимо большой величины.
Торможение противовключением ввиду большого тормозного момента (2~2,5)Л4и обеспечивает быструю остановку двигателя, который должен быть немедленно отключен от сети. Этот вид торможения может применяться для всех двигателей постоянного тока.
Динамическое торможение двигателя

Динамическое торможение применяют для быстрой и точной остановки двигателя. Схема динамического торможения двигателя с описание работы находится здесь. В этой же статье мы рассмотрим физические процессы протекающие при динамическом торможении асинхронных двигателей с короткозамкнутым и фазным ротором.
Динамически торможение вращающегося по инерции инерции короткозамкнутого ротора двигателя возникает после отключения обмотки статора от питающей сети переменного тока. Двигатель останавливается после присоединения обмотки к источнику постоянного тока.
Постоянные токи в фазах обмотки статора обуславливают соответствующую ЭДС, возбуждающую в двигателе неподвижное магнитное поле. Оно наводит в фазах обмотки вращающегося ротора переменные ЭДС и токи убывающей частоты. Следовательно, асинхронный двигатель переходит в режим генератора переменного тока с неподвижными магнитными полюсами. В этом режиме двигатель преобразует кинетическую энергию движущихся и вращающихся по инерции звеньев производственного механизма в электрическую, переходящую в тепловую энергию в цепи обмотки ротора.
Взаимодействие магнитного поля, возбужденного магнитодвижущей силы обмотки статора, с током в фазах обмотки ротора обуславливает возникновение тормозного момента, под действием которого ротор двигателя останавливается.
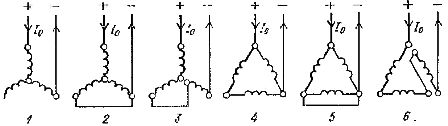
Рис. 1. Схемы включения фаз обмотки статора трехфазного асинхронного двигателя на постоянное напряжение при динамическом торможении
Величина тормозного момента зависит от значения магнитодвижущей силы обмотки статора, величины активного сопротивления регулируемых резисторов цепи обмотки ротора и его скорости. Для получения удовлетворительного торможении величина постоянного тока должна быть в 4 — 5 paз больше тока холостого хода асинхронного двигателя.

Механические характеристики асинхронной машины при динамическом торможении проходят через начало координат, так как при скорости, ранней нулю, тормозной момент отсутствует. Величина максимального тормозною момента возрастает с увеличением постоянною тока, но не зависит от величины активных сопротивлений регулируемых резисторов, введенных в цепь обмотки ротора, которые определяют его скорость, при которой момент достигает значения Мт = Ммах G . При заданном тормозном моменте Мт увеличение активных активного сопротивления резисторов Rд приводит к возрастанию скорости ротора.
Динамическое торможение асинхронных двигателей достаточно экономично и осуществимо как при скоростях меньших синхронной скорости, так и при скоростях, превышающих ее (рис. 2).
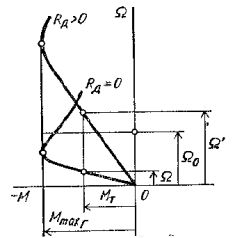
Рис. 2. Механические характеристики трехфазного асинхронного двигателя с фазным ротором при динамическом торможении
Для трехфазных асинхронных двигателей с короткозамкнутым ротором также часто применяют конденсаторное торможение, при котором к зажимам обмотки статора присоединяют симметричную трехфазную батарею конденсаторов, которая после отключения машины от питающей сети и вращающемся по инерции роторе обеспечивает возбуждение в обмотке статора трехфазной симметричной системы напряжений. Вследствие перехода машины на генераторный режим возникает тормозной момент, снижающий скорость ротора двигателя. Подробнее об этом читайте здесь: Конденсаторное торможение асинхронных электродвигателей
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети: