29.Регулирование угловой скорости дпт последовательного возбуждения.
Вводятся резисторы последовательно с обмоткой якоря. Регулировка ступенчатая вниз от основной характеристики. Жёсткость при этом падает. Диапазон регулирования (2-2,5):1 и зависит от нагрузки.
Несмотря на большие потери в резисторах, этот способ находит применение краповых и тяговых установках, т.к. является одним из простейших для ДПТ НВ (мех. хар-ки см. раньше).
- Регулирование изменением тока возбуждения
Используется, когда требуется расширить пределы регулирования за счёт увеличения выше основной. Это достигается путём шунтирования обмотки двигателя.
- Регулирование изменением подводимого напряжения
Может быть реализовано с помощью отдельного генератора, тиристорного преобразователя или последовательно-параллельным включением двигателя.
Последовательность переключений при регулировании двух одинаковых двигателей ПТ ПВ.
30.Регулирование угловой скорости дпт последовательного возбуждения шунтированием обмотки якоря или обмотки возбуждения.
а) Схема шунтирования двигателя
б) Схема шунтирования обмотки якоря
Снижение вызывается падением напряжения на резисторе RП, в котором проходит ток ,. Однако при малых нагрузках характеристика по-прежнему асимптотически приближается к оси ординат, т.е. имеет малую жёсткость. Более благоприятные характеристики на схеме б). Снижение здесь обусловлено вследствие малого сопротивления обмотки возбуждения в основном возрастании потока за счёт увеличения тока, проходящего по обмотке возбуждения. Ток возбуждения протекает по обмотке даже при нулевом токе якоря. В этом случае хар-ки имеют конечные угловые скорости идеального холостого хода и пересекают ось ординат.
Угловая скорость идеального холостого хода тем меньше, чем меньше сопротивление шунтирующего резистора RШ. Вследствие этого при малых значениях нагрузки лежат значительно ниже, чем для обычных реостатных хар-к, а жёсткость хар-к увеличивается. Недостаток – нагрев обмотки возбуждения, поэтому длительная работа недопустима. В этой схеме сочетаются особенности регулирование происходит одновременно за счёт снижения напряжения, подводимого якорю двигателя, изменением потока и реостатное.
Схема шунтирования обмотки якоря.
При заданном токе IЯ можно получить различные токи возбуждения:
Угловая скорость регулируется вниз от основной в широких пределах.
31.Реостатное и импульсное параметрическое регулирование угловой скорости асинхронного электропривода.
Введение резисторов в цепь ротора – реостатное регулирование – позволяет осуществить регулирование вниз от основной характеристики. Плавность зависит от числа ступеней включаемых резисторов. Отличается невысокой жёсткостью, уменьшающейся с ростом сопротивления.
Диапазон регулирования D=2:1.
Основная мощность теряется в регулировочном резисторе. Если скорость снижена в 2 раза номинальной, то приблизительно половина всей потребляемой из сети мощности теряется в регулировочных резисторах.
- Необходимость дискретного изменения сопротивления в роторной цепи с помощью силовых аппаратов, управляемых дистанционно или вручную, что даёт ступенчатое регулирование скорости и исключает возможность использования замкнутых систем АУ;
- Большие потери электроэнергии;
- Невысокое быстродействие.
Реостатное регулирование благодаря своей простоте находит практическое применение в приводе ПТУ, вентиляторов, насосов средней и малой мощности (до 100 КВт).
Плавное бесступенчатое регулирование при введении резисторов в цепь статора или ротора можно получить, использовав импульсное параметрическое регулирование.

Принципиальная схема импульсного параметрического управления АД с короткозамкнутым ротором (с включением добавочных резисторов в цепь статора).
Механические характеристики импульсного параметрического регулирования АД.
При =1 двигатель работает на естественной характеристике (ключи V (полупроводниковые или контактные) – постоянно замкнуты). При =0 двигатель работает на реостатной характеристике, соответствующей постоянно включённому резистору Rдоб (ключи V — разомкнуты). При увеличении активного сопротивления цепи статора уменьшается максимальный момент и критическое скольжение, модуль жёсткости механической характеристики и стабильность угловой скорости падает.
4.8. Регулирование угловой скорости электроприводов переменного тока
Для плавного и глубокого регулирования угловой скорости различных производственных механиз- мов в настоящее время широко применяются разнообраз- ные электроприводы с двигателями постоянного тока. Однако наряду с использованием электроприводов посто- янного тока в последние годы с развитием полупроводнико- вой техники все большее внимание уделяется применению различных систем регулируемых электроприводов пере- менного тока с асинхронными двигателями с короткозамк- нутым ротором или двигателями с фазным ротором. Для установок сравнительно большой мощности в безр£дуктор-.г ных тихоходных электроприводах экономически оправдан- ным оказывается также регулируемый синхронный дви- гатель.
Применение двигателей переменного тока обусловлено их простотой, дешевизной, повышенной надежностью, суще- ственно (в 2—3 раза) меньшими габаритами и массой по сравнению с двигателями постоянного тока. Кроме того, некоторые способы регулирования угловой скорости не тре- буют специальных преобразовательных устройств.
Отмечая достоинства двигателей переменного тока, нельзя не обратить внимания на то, что относительно про- стые способы регулирования угловой скорости электро-
приводов переменного тока обладают и рядом недостатков, к которым можно отнести в одном случае небольшую плавность, в другом — невысокие энергетические показа- тели и т. д. Более эффективные способы регулирования осу- ществляются при помощи сравнительно сложных пре- образовательных устройств и средств управления.
В последующих параграфах рассматриваются различ- ные, получившие практическое применение способы регу- лирования угловой скорости электроприводов перемен- ного тока, анализируются их технико-экономические показатели и определяется возможная область примене- ния.
Наибольшее распространение получили следующие спо- собы регулирования угловой скорости асинхронного дви- гателя: 1) реостатное регулирование; 2) переключением числа полюсов; 3) изменением частоты питающего напря- жения; 4) каскадным включением асинхронного двигателя с другими машинами или преобразователями. Для регули- рования угловой скорости, кроме упомянутых, могут быть использованы некоторые другие способы включения элек- трических двигателей: импульсное регулирование, регу- лирование изменением подводимого к статору напряжения, регулирование с помощью электромагнитной муфты сколь- жения и др.
4.9. Реостатное и импульсное
параметрическое регулирование угловой скорости асинхронного электропривода
Введение резисторов в цепь ротора (реостат- ное регулирование) позволяет, как и для двигателей по- стоянного тока, регулировать угловую скорость двигателя. Плавность регулирования зависит от числа ступеней вклю- чаемых резисторов. Регулирование осуществляется вниз от основной угловой скорости.
Реостатные характеристики асинхронного двигателя, как и в приводе постоянного тока, отличаются невысокой жесткостью, уменьшающейся с ростом сопротивления рези- сторов в роторной цепи. Если считать, что рабочая часть механической характеристики двигателя линейна, то мо- дуль жесткости реостатной характеристики

(4.33)
где shom.p — скольжение на реостатной характеристике, соответствующее номинальному моменту. Если учесть, что диапазон регулирования


(4.34)
Формула (4.34) подтверждает сказанное — чем больше диапазон регулирования, тем меньше жесткость характе- ристик.
Любой способ регулирования скорости привода, в том числе и реостатное регулирование, теоретически при неиз- менном моменте нагрузки может обеспечить D = ∞. Од- нако практически в силу различных причин возникают отклонения нагрузочного момента от расчетного; это откло- нение момента ΔМС вызывает изменение угловой ско- рости Δω. Если отнести его к расчетной угловой скорости на регулировочной характеристике сор, то относительнее отклонение угловой скорости, или точность регулирования, можно записать:

(4.35)
где ΔМС* — относительное отклонение момента нагрузки от МHOM; βр* = ΔМ*/Δω* —модуль жесткости реостатной характеристики в относительных единицах (при базовых единицах .Мном и ω0).
Подставляя значение βр* из (4.34) в (4.35), получаем:

(4.36)
Отсюда можно найти допустимый диапазон при рео- статном регулировании по заданному отклонению нагру- зочного момента и допустимой точности регулирования:

(4.37)

(4.38)
Из (4.38) видно, что, например, при равных относи- тельных отклонениях угловой скорости и момента нагрузки диапазон регулирования D = 2 : 1. При еще меньшем допустимом относительном отклонении угловой скорости по отношению к возможному относительному отклонению момента нагрузки диапазон регулирования окажется еще
меньшим. Следовательно, практически допустимый диа- пазон при реостатном регулировании угловой скорости не превышает (1,5 -:- 2) : 1. В условиях эксплуатации напряжение питающей сети также может изменяться отно- сительно номинального значения. Его снижение приведет к уменьшению модуля жесткости характеристики и к еще большему уменьшению диапазона регулирования.
При вентиляторной нагрузке может быть допущен больший диапазон регулирования, примерно (3 -:- 5) : 1.
Реостатное регулирование скорости двигателей средней и большой мощности может осуществляться плавно с по- мощью, например, жидкостного реостата, включаемого в роторную цепь. Этот способ из-за нестабильности сопро- тивления электролита, громоздкости реостата и повышен- ной инерционности регулирования не нашел широкого применения.
Чаще всего используются дополнительные металлические резисторы, ступени которых регулируются дискретно при помощи контакторов, поэтому регулирование получается ступенчатое. Плавность регулирования тем выше, чем больше число ступеней регулировочного резистора.
Допустимая нагрузка длительно работающего двига- теля при реостатном регулировании определяется неизмен- ным моментом, равным номинальному, так как номиналь- ному моменту соответствует номинальный ток двигателя. В этом случае предполагается, что двигатель имеет неза- висимую вентиляцию и охлаждается одинаково интенсивно при любой угловой скорости.
Допустимый ток и соответственно допустимый момент самовентилируемого двигателя должен быть снижен по сравнению с номинальным тем в большей мере, чем ниже его угловая скорость. . .
Допустимый момент асинхронных самовентилируемых двигателей с фазным ротором уменьшается по мере сниже- ния угловой скорости примерно до 0,4 ωном в соответ- ствии с равенством

(4.39)
Если момент нагрузки при регулировании угловой скорости остается неизменным и равным номинальному, то нужно завысить установленную мощность двигателя (использовать двигатель с большей номинальной мощностью) так, чтобы момент нагрузки не превысил допустимый момент двигателя при минимальной угловой скорости.
При этом условии и для допустимого момента, определяе- мого равенством (4.39), коэффициент завышения мощности равен:

(4.40)
Принимая ориентировочно Мдоп линейно-зависящим от угловой скорости, получаем:

(4.41)
где М0* = Мдоп0/Мном — относительный допустимый мо- мент двигателя при неподвижном состоянии ротора дви- гателя (для асинхронных самовентилируемых двигателей с фазным ротором М0* ≈0,25).

(4.42)
Потери мощности при реостатном регулировании скла- дываются из переменных потерь, включающих потери в меди статора и ротора и во внешних резисторах роторной цепи, и постоянных — не зависящих от нагрузки. К последним относятся потери в стали статора и ротора, а также меха- нические и добавочные, обусловленные полями рассеяния и высшими гармониками МДС статора и ротора.
Потери в стали статора в данном случае остаются по- стоянными независимо от скольжения, так как напря- жение, подводимое к статору, не изменяется.
Механические потери приблизительно пропорциональны угловой скорости, с увеличением скольжения уменьша- ются, при этом потери в стали ротора возрастают вслед- ствие увеличения частоты тока ротора, поэтому можно приближенно считать, что сумма постоянных потерь оста- ется неизменной независимо от нагрузки и скорости при- вода.
Сумма же переменных потерь мощности может быть найдена по формуле

(4.43)

(4.44)
где sк,и, sк,е — соответственно критическое скольжение, отвечающее искусственной (реостатной) и естественной ха- рактеристикам двигателя; RДОБ, R2— внешнее дополнитель- ное и собственное сопротивления фазы ротора.
При одном и том же моменте на естественной и искусст- венной характеристиках справедливо соотношение:

(4.45)
здесь sи, se — соответственно текущее значение скольжения на искусственной и естественной характеристиках.

 (4.46)
(4.46)

(4.47)
Таким образом, при неизменном моменте нагрузки и ре- остатном управлении потери мощности в роторной цепи изменяются пропорционально скольжению, а потери в ста- торе не зависят от скольжения и остаются неизменными при данном моменте нагрузки.
Напомним, что основная мощность теряется в регулиро- вочном резисторе. Если, например, скорость двигателя снижена вдвое по сравнению с номинальной, то примерно половина всей потребляемой из сети мощности теряется в регулировочных резисторах.
Иначе оцениваются потери мощности в меди статора и ротора при вентиляторной нагрузке. Для упрощения будем считать, что вентиляторная характеристика выражается квадратичной зависимостью момента нагрузки от угловой скорости, а момент холостого хода вентилятора не учиты- вается. Тогда

(4.48)

(4.49)
Подставляя эти значения в (4.43), получаем:

(4.50)
Первый член (4.50,) определяет потери мощности в ро- торной цепи от скольжения

(4.51)
где рном — номинальная мощность двигателя.
Из (4.51) следует, что при s = 0 и s = 1 потери мощности в роторной цепи ΔР2 = 0.
Анализ (4.51) показывает, что максимум потерь мощно- сти в роторной цепи при вентиляторной нагрузке так же, как и в случае привода постоянного тока, имеет место при s = 1 /3 и составляет:

(4.52)
Например, при shom = 0,02 ΔР2тах = 0,16РНОМ. Потери мощности в меди статора при вентиляторной нагрузке (без учета потерь от тока холостого хода) равны:

(4.53)
(4.54)
Из (4.54) следует, что при s, изменяющемся от 1 до sном

ΔP1 изменяется от 0 до
На рис. 4.31 приведены кривые относительных потерь мощности 
 при рео- статном регулировании и вентиляторной нагрузке.
при рео- статном регулировании и вентиляторной нагрузке.
Суммарные потери мощности при регулировании угло- вой скорости равны:

(4.55)
где ΔР∑пост — постоянные потери.
Обычно привод работает на различных регулировочных характеристиках неодинаковое время. В этом случае по- тери энергии за регулировочный цикл следует определять с учетом продолжительности работы на каждой характери- стике, поэтому

(4.56)
где АР1 ΔР2, . ΔРп и t1 t2, . tn — соответственно суммар- ные потери мощности и продолжительность работы при- вода на первой, второй, . п-й регулировочных характери- стиках.
Зная полезную мощность, развиваемую приводом на каждой регулировочной характеристике, можно найти
КПД привода за регулировочный цикл
(4.57)
Коэффициент мощности при реостатном регулировании с постоянным моментом нагрузки и неизменным магнит- ным потоком остается постоянным.
Если на валу двигателя имеет место вентиляторная на- грузка, то со снижением угловой скорости коэффициент

Рис. 4.31. Кривые относитель- Рис. 4.32. Зависимость коэффициен- ных потерь мощности ΔР2* и та мощности от скольжения асин- ΔP1*, при реостатном регули- хронного двигателя с реостатным ровании и вентиляторной на- регулированием при различных на- грузке, грузках (в относительных едини- цах).
I— при Мс = const; 2 — при венти- ляторной нагрузке.
мощности падает. При уменьшении угловой скорости вслед- ствие снижения момента нагрузки и соответственно тока ротора уменьшается потребляемая двигателем активная мощность. Однако с уменьшением роторного тока неизмен- ными остаются значения намагничивающего тока и соот- ветственно потребляемой двигателем реактивной мощности, и поэтому коэффициент мощности первичной цепи падает с уменьшением угловой скорости.
На рис. 4.32 приведены в относительных единицах (отнесенные к номинальному значению коэффициента мощ- ности) примерные значения коэффициента мощности асин- хронного привода с реостатным регулированием при раз- личных нагрузках.
Следует отметить, что энергетические показатели регу- лируемого электропривода за цикл зависят от режима ра- боты. При продолжительном режиме они существенно ниже, чем при повторно-кратковременном. В обоих случаях они тем выше, чем меньше диапазон регулирования и чем большую часть времени привод работает на повышенных ско-
Недостатками реостатного регулирования скорости яв- ляются: 1) необходимость дискретного изменения сопротив- ления в роторной цепи с помощью силовых аппаратов, уп- равляемых дистанционно или вручную, что дает ступенча- тое регулирование скорости и исключает возможность ис- пользования замкнутых систем автоматического управле- ния; 2) невысокое быстродействие; 3) большие потери энер- гии.
Реостатное регулирование благодаря своей простоте находит практическое применение, например, в приводе подъемно-транспортных устройств, вентиляторов и насосов малой и средней мощности (до 100 кВт).
Плавное бесступенчатое регулирование угловой скорости асинхронных двигателей при введении резисторов в цепь статора или ротора можно получить (при небольшой мощно- сти двигателя), использовав импульсное параметрическое регулирование, применяемое в автоматизированном элект- роприводе для стабилизации заданного значения угловой скорости при изменении момента нагрузки или для пред- варительного снижения скорости перед остановкой при- вода.
Схема включения асинхронного двигателя с короткозам- кнутым ротором при импульсном регулировании добавоч- ного сопротивления (во всех трех фазах) в цепи статора при- ведена на рис. 4.33, а. Механические; характеристики дви- гателя, включенного по этой схеме, для различных значе- ний скважности ε показаны на рис. 4.33, б.
При ε = 1 двигатель будет работать на естественной ха- рактеристике (ключи К двусторонней проводимости — по- лупроводниковые или контактные — постоянно замкнуты). При ε = 0 двигатель будет работать на реостатной характе- ристике, соответствующей постоянно включенному рези- стору Rд (ключи К разомкнуты). Как следует из (3.37) и (3.38), при увеличении активного сопротивления цепи ста- тора уменьшаются максимальный момент и критическое скольжение, модуль жесткости механической характери- стики и стабильность угловой скорости уменьшаются.
Допустимый момент асинхронного двигателя с коротко- замкнутым ротором при импульсном параметрическом ре- гулировании со снижением угловой скорости резко падает (как это показано штриховой линией на рис. 4.33, б), так как значительно возрастают потери в нем (потери в цепи ротора равны ΔР = Мω0s), а выделяются они все внутри машины. Для двигателя с независимой (принудительной) вентиляцией по мере увеличения скольжения нужно так уменьшать момент нагрузки, чтобы потери в двигателе не превышали номинальных. Поэтому схема, показанная на рис. 4 33, а, может быть использована в приводах малой

Рис. 4.33. Принципиальная схема импульсного параметрического уп- равления асинхронным двигателем с короткозамкнутым ротором (а) и механические характеристики (б).
мощности и в кратковременном режиме работы. По этой же причине диапазон регулирования обычно не превышает (1,15—1,2) : 1 при продолжительном режиме работы. В крат- ковременном режиме работы регулирование угловой ско- рости в более широких пределах может производиться лишь при осуществлении замкнутых систем управления, в кото- рых используются обратные связи для автоматического поддержания угловой скорости двигателя на заданном уровне.
Лучшее использование двигателя при импульсном пара- метрическом регулировании угловой скорости асинхронного двигателя достигается, когда применяется двигатель с фаз- ным ротором. В этом случае дополнительные потери мощно- сти, обусловленные регулированием угловой скорости, в основном выделяются в добавочных резисторах вне ма-
шины, поэтому допустимый момент для двигателя с незави- симой вентиляцией оказывается примерно равным номи- нальному. Схема включения асинхронного двигателя с фаз- ным ротором при импульсном параметрическом регулиро- вании угловой скорости приведена на рис. 4.34, а. Дополни- тельный резистор R включен через выпрямитель В в ротор- ную цепь последовательно со сглаживающим реактором. Резистор R периодически включается и выключается с по- мощью ключа К (контактного или тиристорного, выпол- ненного, например, по схеме рис. 4.6, г).

Рис. 4.34. Схема включения асинхронного двигателя с фазным рото- ром с импульсным параметрическим регулированием угловой скоро- сти (а), механические характеристики (б).
Когда ключ К замкнут (ε = 1), двигатель работает на характеристике, соответствующей Rэ = О (рис. 4.34,б); если ключ разомкнут (ε = 0) и Rэ = R, то двигатель рабо- тает на реостатной характеристике. Рабочая зона при импульсном параметрическом регулировании располага- ется между двумя крайними характеристиками.
Энергетические показатели при импульсном регулиро- вании сопротивления несколько хуже, чем при ступенча- том его изменении. Это обусловлено пульсациями выпрям- ленного тока (или действующего значения тока), увеличи- вающими потери, наличием в цепи обмоток тиристоров, ко- торые искажают форму «тока двигателя, что приводит к по- явлению моментов высших гармоник и дополнительным потерям.
Импульсное управление асинхронным двигателем с фаз- ным ротором в цепи выпрямленного тока простыми сред- ствами обеспечивает плавное и в широких пределах (в зам- кнутых системах) регулирование угловой скорости с высо- ким быстродействием.
Реостатное и импульсное регулирование угловой скорости двигателей
3. двигатель постоянного тока независимого возбуждения
ДВИГАТЕЛЬ ПОСТОЯННОГО
ТОКА НЕЗАВИСИМОГО
ВОЗБУЖДЕНИЯ
3
4.
• Реостатное регулирование угловой скорости
производится с помощью контакторов,
замыкающих отдельные ступени резисторов, т. е.
скорость привода изменяется дискретно, поэтому
данный способ при контакторном управлении не
обеспечивает плавного регулирования.
Применение жидкостного (при малой мощности
двигателя) или ползункового реостата позволяет
достигнуть плавного регулирования.
• При реостатном регулировании значительная
часть мощности теряется на реостатах
• Практически невозможно автоматическое
регулирование
4
5.
• Другим способом достижения плавного
регулирования при введении резисторов в цепь
якоря является использование (при небольшой
мощности двигателя) импульсного
параметрического регулирования угловой
скорости, применяемого также в
автоматизированном электроприводе для
стабилизации (поддержания) заданного значения
угловой скорости при изменении момента
нагрузки или для предварительного снижения
скорости перед остановкой привода.
5
6.
Схема включения ДПТ НВ при импульсном регулировании
добавочного сопротивления (а); график регулирования угловой
скорости «ω» при изменении скважности «ε» замыкания
контакта К (б); мех. хар-ки при импульсном регулировании
сопротивления (в), схема тиристорного ключа (г).
6
7.
8.
9.
10.
• Так, если момент нагрузки постоянен (следовательно,
постоянна потребляемая мощность) и угловая скорость
двигателя уменьшается вдвое, то примерно половина
мощности, потребляемой из сети, будет рассеиваться в виде
теплоты, выделяемой в реостате, т. е. данные способы
регулирования (реостатный и импульсный параметрический)
являются неэкономичными.
• При импульсном регулировании сопротивления
энергетические показатели несколько хуже, чем при
ступенчатом его изменении. Это обусловлено наличием в
кривой тока якоря переменной составляющей, вызванной
коммутациями ключа, что приводит к увеличению потерь
энергии.
10
11. Регулирование угловой скорости ДПТ НВ изменением напряжения якоря с помощью управляемых тиристорных выпрямителей
12.
13. Регулирование угловой скорости ДПТ НВ изменением напряжения якоря посредством импульсных регуляторов напряжения (ШИП)
14.
• Регулирование напряжения на якоре двигателя
можно осуществить импульсным методом, когда
двигатель периодически подключается к
источнику питания и отключается от него. В
период отключения электропривод продолжает
работать за счет запасенной кинетической и
электромагнитной энергии.
14
15.
16.
• Схема включения двигателя постоянного тока
независимого возбуждения при импульсном
регулировании напряжения показана на рис а).
Диод V, шунтирующий якорь двигателя, создает
цепь для протекания тока якоря под действием
ЭДС самоиндукции, возникающей в
индуктивности обмотки якоря в период
разомкнутого состояния ключа К.
• Это создает условия для непрерывного
протекания тока якоря, что существенно
уменьшает его пульсации и устраняет
коммутационные перенапряжения на ключе К и
обмотке якоря.
16
17.
18.
19.
• Основным средством сужения зоны прерывистых
токов, уменьшения пульсаций тока якоря (момента)
и угловой скорости относительно среднего значения
и, следовательно, дополнительных потерь в
обмотках якоря является увеличение частоты
коммутации ключа К.
• Обычно частота коммутации: 800-1200 Гц.
• Увеличению ее препятствует рост потерь в ключе
(транзисторе, тиристоре) и его предельные
динамические параметры.
• Для реализации рассмотренного способа
регулирования напряжения могут быть
использованы либо транзисторы, работающие в
режиме ключа, либо тиристоры.
19
20.
• Электроприводы с ШИР напряжения на якоре
двигателя вследствие их относительной простоты и
высокого быстродействия широко используются в
различных отраслях промышленности и техники, в
транспортных установках и т. д. Они особенно
удобны при наличии сети постоянного тока или в
автономных установках при питании привода от
аккумуляторов.
• В случае сети переменного тока питание привода с
ШИР производится через неуправляемый
выпрямитель. При этом возникают большие
трудности с организацией тормозных режимов и
реверса двигателя по цепи якоря, вследствие чего
область применения такого привода ограничивается 20
установками малой мощности.
21. Регулирование угловой скорости электроприводов переменного тока
РЕГУЛИРОВАНИЕ УГЛОВОЙ
СКОРОСТИ
ЭЛЕКТРОПРИВОДОВ
ПЕРЕМЕННОГО ТОКА
21
22.
• Для плавного и глубокого регулирования
угловой скорости различных производственных
механизмов в настоящее время широко
применяются разнообразные электроприводы с
двигателями постоянного тока.
• Однако наряду с использованием
электроприводов постоянного тока в последние
годы с развитием полупроводниковой техники
все большее внимание уделяется применению
различных систем регулируемых
электроприводов переменного тока с
асинхронными двигателями с короткозамкнутым
ротором или двигателями с фазным ротором.
22
23.
• Применение двигателей переменного тока
обусловлено их простотой, дешевизной,
повышенной надежностью, существенно (в 2—3
раза) меньшими габаритами и массой по сравнению
с двигателями постоянного тока.
• Некоторые способы регулирования угловой
скорости не требуют специальных
преобразовательных устройств.
• К недостаткам относятся небольшая плавность и
невысокие энергетические показатели.
• Более эффективные способы регулирования
осуществляются при помощи сравнительно сложных
преобразовательных устройств и средств
управления.
23
24. Реостатное и импульсное параметрическое регулирование
РЕОСТАТНОЕ И ИМПУЛЬСНОЕ
ПАРАМЕТРИЧЕСКОЕ РЕГУЛИРОВАНИЕ
24
25.
• Введение резисторов в цепь ротора (реостатное
регулирование) позволяет, как и для двигателей
постоянного тока, регулировать угловую
скорость двигателя. Плавность регулирования
зависит от числа ступеней включаемых
резисторов. Регулирование осуществляется вниз
от основной угловой скорости.
• Реостатные характеристики асинхронного
двигателя отличаются невысокой жесткостью,
уменьшающейся с ростом сопротивления
резисторов в роторной цепи.
25
26.
• Плавное бесступенчатое регулирование угловой скорости
асинхронных двигателей при введении резисторов в цепь
статора или ротора можно получить (при небольшой
мощности двигателя), использовав импульсное
параметрическое регулирование, применяемое в
автоматизированном электроприводе для стабилизации
заданного значения угловой скорости при изменении
момента нагрузки или для предварительного снижения
скорости перед остановкой привода.
26
27.
• При ε = 1 двигатель будет работать на естественной
характеристике (ключи К двусторонней
проводимости — полупроводниковые или
контактные — постоянно замкнуты).
• При ε = 0 двигатель будет работать на реостатной
характеристике, соответствующей постоянно
включенному резистору Rд (ключи К разомкнуты).
• При увеличении активного сопротивления цепи
статора уменьшаются максимальный момент и
критическое скольжение, модуль жесткости
механической характеристики и стабильность
угловой скорости уменьшаются.
27
28.
29.
• Поэтому схема, показанная на рис. а), может
быть использована в приводах малой мощности и
в кратковременном режиме работы. Диапазон
регулирования обычно не превышает
(1,15—1,2) : 1 при продолжительном режиме
работы.
• В кратковременном режиме работы
регулирование угловой скорости в более
широких пределах может производиться лишь
при осуществлении замкнутых систем
управления, в которых используются обратные
связи для автоматического поддержания угловой
скорости двигателя на заданном уровне.
29
30.
• Лучшее использование двигателя при
импульсном параметрическом регулировании
угловой скорости асинхронного двигателя
достигается, когда применяется двигатель с
фазным ротором. В этом случае дополнительные
потери мощности, обусловленные
регулированием угловой скорости, в основном
выделяются в добавочных резисторах вне
машины, поэтому допустимый момент для
двигателя с независимой вентиляцией
оказывается примерно равным номинальному.
30
31.
• Схема включения асинхронного двигателя с фазным ротором
при импульсном параметрическом регулировании угловой
скорости.
• Дополнительный резистор R включен через выпрямитель В в
роторную цепь последовательно со сглаживающим
реактором. Резистор R периодически включается и
выключается с помощью ключа К (контактного или
тиристорного.
31
32.
• Когда ключ К замкнут (ε = 1), двигатель работает
на характеристике, соответствующей Rэ = 0 (рис.
б); если ключ разомкнут (ε = 0) и Rэ = R, то
двигатель работает на реостатной
характеристике.
• Рабочая зона при импульсном параметрическом
регулировании располагается между двумя
крайними характеристиками.
• Энергетические показатели при импульсном
регулировании сопротивления несколько хуже,
чем при ступенчатом его изменении из-за
пульсаций выпрямленного тока (или
действующего значения тока).
32
33. Регулирование изменением напряжения
РЕГУЛИРОВАНИЕ ИЗМЕНЕНИЕМ
НАПРЯЖЕНИЯ
33
34.
• Если регулировать напряжение, подводимое к
трем фазам статора асинхронного двигателя, то
можно, отвлекаясь от влияния параметров
регулирующего устройства на характеристики
двигателя, изменять максимальный момент, не
изменяя критического скольжения. Устройством
для регулирования напряжения может быть,
например, тиристорный регулятор; при этом в
каждой фазе статора двигателя находятся два
встречно-параллельно включенных тиристора.
Управляя углом включения тиристоров (фазовое
управление), можно плавно менять действующее
значение напряжения.
34
35.
36.
• Регулирование угловой скорости двигателя при
этом способе происходит за счет уменьшения
модуля жесткости механических характеристик и
осуществляется вниз от номинальной угловой
скорости.
• Плавность регулирования определяется
плавностью изменения напряжения; при
применении тиристорного регулятора
напряжения угловая скорость регулируется
бесступенчато.
36
37.
• Из графиков механических характеристик следует, что
пределы регулирования весьма ограничены даже при
использовании вентиляторной нагрузки, но они могут быть
существенно расширены в замкнутых системах
электропривода. В действительности вследствие уменьшения
критического скольжения из-за влияния параметров
регулирующего устройства пределы регулирования в
разомкнутых системах еще уменьшаются.
• Механические
характеристики двигателя с
короткозамкнутым ротором
при регулировании
напряжения па статоре
приведены на рисунке
37
38.
• Так как большие потери мощности скольжения в
двигателе с короткозамкнутым ротором
выделяются в самом роторе, то допустимый
момент резко уменьшается по мере роста
скольжения, поэтому такой неэкономичный
способ регулирования угловой скорости
асинхронного двигателя с короткозамкнутым
ротором можно использовать только при малой
мощности двигателя и в кратковременном
режиме работы.
38
39.
• Лучшее использование двигателя и более
благоприятные характеристики могут быть
получены, если применить двигатель с фазным
ротором, в роторную цепь его включить
дополнительный нерегулируемый резистор и
регулировать напряжение на статоре (рис. а).
Механические характеристики для
рассматриваемого способа приведены на рис. б.
• Преимущество этого способа по сравнению с
реостатным заключается в том, что управление
двигателем осуществляется плавно и
исключается контактная аппаратура в роторной
цепи.
39
40.
41.
• Потери энергии в приводе получаются примерно
такими же или несколько больше, как и при
реостатном регулировании; потери мощности
скольжения в основном выносятся из двигателя
и выделяются в дополнительном резисторе, что
увеличивает допустимый момент. Этот способ
может быть использован при вентиляторной
нагрузке для продолжительного режима, а при
Мс = const для кратковременного режима
работы.
• Очевидно, что регулирование изменением
напряжения может быть осуществлено только
вниз от основной угловой скорости.
41
42.
• Механические характеристики (рис. б) по мере
снижения напряжения становятся мягкими и не
обеспечивают стабильности угловой скорости
при возможном отклонении нагрузки.
• Наличие постоянно включенного резистора
приводит к недоиспользованию двигателя по
скорости (угловая скорость всегда меньше
номинальной) и по мощности. Повышение
стабильности угловой скорости и расширение
диапазона регулирования до (5 — 10) : 1
достигается в замкнутых системах.
42
43.
• Для регулирования напряжения используются
как тиристорные регуляторы напряжения с
фазовым управлением, так и
автотрансформаторы и импульсные, например
тиристорные или контактные регулирующие
устройства.
43
44.
45.
• Простейшая схема включения АД с КЗР при
импульсном регулировании напряжения
приведена на рис. (слева);
• Механические характеристики двигателя,
включенного по этой схеме, для различных
значений скважности ε включенного состояния
ключей К — на рис. (справа). При ε = 1 двигатель
работает на естественной характеристике (ключи
К постоянно замкнуты); при ε = 0 двигатель
отключен от сети. Характеристики двигателя и
его свойствапри эюм способе регулирования
такие же, как и при непрерывном регулировании
напряжения.
45
46.
• Энергетические показатели при импульсном
регулнровании напряжения хуже из-за больших
пульсаций напряжения и угловой скорости, а
также из-за переходных электромагнитных
процессов, вызванных включением и
отключением обмоток статора двигателя
• Частота коммутаций здесь может быть
небольшая, ограниченная целым числом
полупериодов для включенного состояния
тиристорных или симисторных ключей К-
46
47.
48.
49.
• Наложение двигательного и тормозного режимов
вызывает почти непрерывные электромагнитные
переходные процессы, обусловливающие
увеличение потерь мощности. Основное
достоинство этого способа импульсного
регулирования — повышенная жесткость
механических характеристик в области
генераторного режима, что может быть полезным
при некоторых применениях этого способа.
• Импульсное регулирование переменного
напряжения применяется редко, оно уступило
место фазовому и другим видам непрерывного
регулирования.
49
50. Частотное регулирование
ЧАСТОТНОЕ
РЕГУЛИРОВАНИЕ
50
51.
52.
• При уменьшении частоты поток возрастет и это
приведет к насыщению стали машины и как
следствие к резкому увеличению тока и
превышению температуры двигателя; при
увеличении частоты поток будет уменьшаться и
как следствие будет уменьшаться допустимый
момент.
52
53.
• Для наилучшего использования асинхронного
двигателя при регулировании угловой
скорости изменением частоты необходимо
регулировать напряжение одновременно в
функции частоты и нагрузки, что
реализуемо только в замкнутых системах
электропривода.
• В разомкнутых системах напряжение
регулируется лишь в функции частоты по
некоторому закону, зависящему от вида
нагрузки.
53
54.
• Экономические выгоды частотного
регулирования особенно существенны для
приводов, работающих в повторнократковременном режиме, где имеет место
частое изменение направления вращения с
интенсивным торможением.
54
55.
• Для осуществления частотного регулирования
угловой скорости находят применение
преобразователи, на выходе которых по
требуемому соотношению или независимо
меняется как частота, так и амплитуда
напряжения.
• Преобразователи частоты можно разделить на
электромашинные и вентильные.
55
Управление трехфазными двигателями, способы регулирования скорости двигателей
Управление асинхронными двигателями может быть либо параметрическим, т. е. за счет изменения параметров цепей машины, либо от индивидуального преобразователя.
Критическое скольжение слабо зависит от активного сопротивления цепи статора. При введении дополнительного сопротивления в цепь статора значение несколько уменьшается. Максимальный же момент может уменьшиться существенно. В итоге механическая характеристика приобретет вид, показанный на рис. 1.
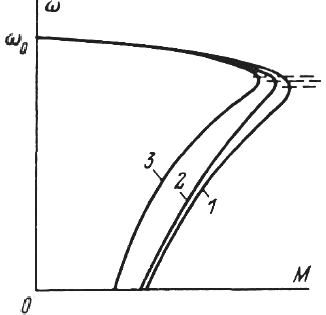
Рис. 1. Механические характеристики асинхронного двигателя при изменении параметров первичной и вторичной цепи: 1 — естественная, 2 и 3 — при введении добавочного активного и индуктивного сопротивления в цепь статора
Сопоставляя ее с естественной характеристикой двигателя, можно сделать вывод, что введение добавочного сопротивления в цепь статора мало влияет на скорость. При неизменном статическом моменте скорость понизится незначительно. Поэтому данный способ регулирования скорости малоэффективен и в таком простейшем варианте не используется.
Малоэффективно и введение индуктивного сопротивления в цепь статора. Критическое скольжение также несколько уменьшится, а момент двигателя за счет увеличения сопротивления снижается существенно. Соответствующая механическая характеристика представлена на том же рис. 1.
Иногда добавочное сопротивление вводится в цепь статора для ограничения пусковых токов. При этом в качестве дополнительного индуктивного сопротивления обычно применяют дроссели, а активного — тиристоры (рис. 2).
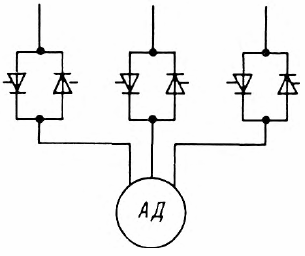
Рис. 2. Включение тиристоров в цепь статора
Следует, однако, иметь в виду, что при этом существенно уменьшается не только критический, но и пусковой момент двигателя (при s = 1), а значит, пуск в этих условиях возможен лишь при малом статическом моменте. Введение добавочного сопротивления в цепь ротора, естественно, возможно лишь для двигателя с фазным ротором.
Добавочное индуктивное сопротивление в цепи ротора оказывает такое же влияние на скорость двигателя, как и введение его в цепь статора.
Практически использование индуктивного сопротивления в цепи ротора крайне затруднено, в связи с тем что оно должно функционировать при переменной частоте — от 50 Гц до нескольких герц, а иногда и долей герца. Для таких условий создать дроссель весьма трудно.
При малой частоте в основном будет сказываться активное сопротивление катушки индуктивности. Исходя из приведенных соображений индуктивное сопротивление в цепи ротора для регулирования скорости никогда не используется.
Наиболее эффективный способ параметрического регулирования скорости — введение добавочного активного сопротивления в цепь ротора. При этом мы получаем семейство характеристик с постоянным максимальным моментом. Эти характеристики используются для ограничения тока и поддержания постоянного момента, а также могут применяться и для управления скоростью.
На рис. 3 показано, как, изменяя r 2, т. е. вводя r доб, можно при некотором статическом моменте изменять скорость в широких пределах — от номинальной до нуля. Однако практически можно регулировать скорость лишь при достаточно больших значениях статического момента.
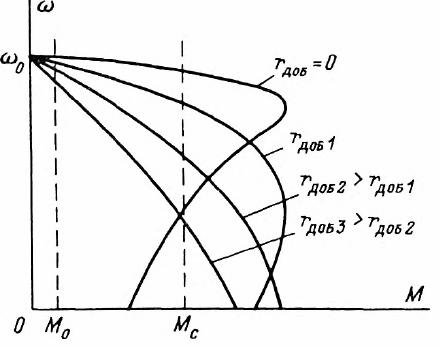
Рис. 3. Механические характеристики асинхронного двигателя при введении добавочного сопротивления в цепь ротора
При малых значениях (Мо) в режиме, близком к холостому ходу, диапазон регулирования скорости существенно сокращается и для заметного снижения скорости пришлось бы вводить весьма большие добавочные сопротивления.
Следует иметь в виду, что при работе на низких скоростях и при больших статических моментах стабильность скорости будет недостаточна, так как из-за большой крутизны характеристик незначительные флюктуации момента будут вызывать существенные изменения скорости.
Иногда для обеспечения разгона двигателя без последовательного выведения секций реостата параллельно подключают реостат и катушку индуктивности к кольцам ротора (рис. 4).
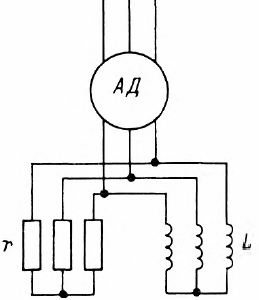
Рис. 4. Параллельное включение добавочного активного и индуктивного сопротивления в цепь ротора асинхронного двигателя
В начальный момент пуска, когда частота тока в роторе велика, ток в основном замыкается через реостат, т. е. через большое сопротивление, чем обеспечивается достаточно высокий пусковой момент. По мере снижения частоты индуктивное сопротивление снижается и ток начинает замыкаться и через индуктивность.
При выходе на рабочие скорости, когда скольжение мало, ток в основном протекает через катушку индуктивности, сопротивление которой при малой частоте определяется электрическим сопротивлением обмотки rоб. Таким образом, при пуске внешнее сопротивление вторичного контура как бы автоматически изменяется от r реост до r об и разгон происходит практически при постоянном моменте.
Параметрическое управление, естественно, связано с большими потерями энергии. Энергия скольжения, которая в виде электромагнитной энергии передается через зазор со статора на ротор и обычно преобразуется в механическую, при большом сопротивлении вторичного контура в основном идет на нагрев этого сопротивления, и при s = 1 вся энергия, передаваемая со статора на ротор, будет расходоваться в реостатах вторичного контура (рис. 5).
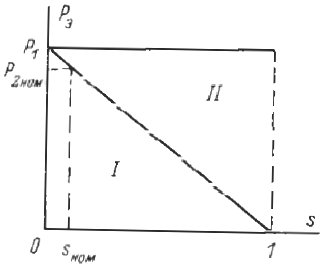
Рис. 5. Потери во вторичном контуре при регулировании скорости асинхронного двигателя введением добавочного сопротивления в цепь ротора: I — зона полезной мощности, передаваемой на вал двигателя , II — зона потерь в сопротивлениях вторичного контура
Поэтому параметрическое управление в основном используется для кратковременного снижения скорости по ходу технологического процесса, выполняемого рабочей машиной. Лишь в тех случаях, когда процессы управления скоростью сочетаются с пуском и торможением рабочей машины, как, например, в подъемных установках, параметрическое управление с введением добавочного сопротивления в цепь ротора используется как основное средство регулирования скорости.
Регулирование скорости изменением подводимого к статору напряжения
При регулировании скорости асинхронного двигателя изменением напряжения форма механической характеристики при этом сохраняется неизменной, а моменты снижаются пропорционально квадрату напряжения. Механические характеристики при различном напряжении представлены на рис. 6. Как видно, в случае использования двигателей обычного исполнения диапазон регулирования скорости весьма ограничен.
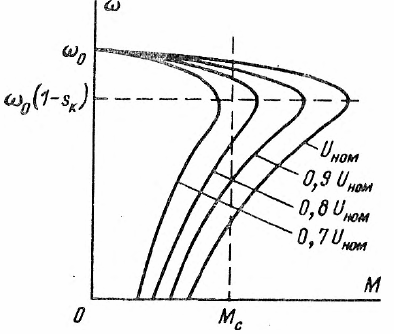
Рис. 6 . Регулирование скорости асинхронного двигателя изменением напряжения в цепи статора
Несколько больший диапазон может быть обеспечен с двигателем повышенного скольжения. Однако в этом случае механические характеристики имеют большую крутизну (рис. 7) и устойчивая работа двигателя может быть достигнута лишь при использовании замкнутой системы, обеспечивающей стабилизацию скорости.
При изменении статического момента система регулирования поддерживает заданный уровень скорости и происходит переход с одной механической характеристики на другую. В итоге работа протекает на характеристиках, показанных штриховыми линиями.
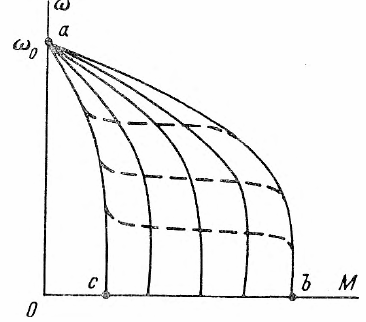
Рис. 7. Механические характеристики при регулировании напряжения статора в замкнутой системе
При перегрузке привода двигатель выходит на предельную характеристику а b , соответствующую максимальному возможному напряжению, которое обеспечивает преобразователь, и при дальнейшем росте нагрузки скорость будет снижаться по этой характеристике. При малых нагрузках, если преобразователь не сможет снизить напряжение до нулевого, будет подъем скорости по характеристике ас.
В качестве источника с регулируемым напряжением обычно используют магнитные усилители или тиристорные преобразователи. В случае использования тиристорного преобразователя (рис. 8 ) последний обычно функционирует в импульсном режиме. При этом на зажимах статора асинхронного двигателя поддерживается некоторое среднее напряжение, необходимое для обеспечения заданной скорости.
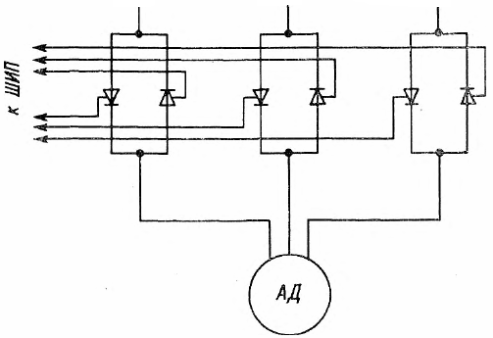
Рис. 8. Схема импульсного управления скоростью асинхронного двигателя
Для регулирования напряжения на зажимах статора двигателя, казалось бы, возможно использование трансформатора или автотрансформатора с секционными обмотками. Однако применение индивидуальных трансформаторных агрегатов связано с очень большими затратами и не обеспечивает нужного качества регулирования, так как в этом случае возможно только ступенчатое изменение напряжения, а ввести в автоматическую систему устройство переключения секций практически невозможно. Иногда автотрансформаторы используются для ограничения пусковых токов мощных двигателей.
Регулирование скорости переключением секций обмоток статора на различное число пар полюсов
Существует ряд производственных механизмов, которые по ходу технологического процесса должны работать на различных уровнях скорости, при этом нет необходимости в плавном регулировании, а достаточно иметь привод с дискретным, ступенчатым, изменением скорости. К подобным механизмам относятся некоторые металло- и деревообрабатывающие станки, подъемники и др.
Ограниченное число фиксированных скоростей вращения может быть обеспечено с помощью многоскоростных короткозамкнутых двигателей, в которых обмотка статора переключается на различное число пар полюсов. Беличья клетка короткозамкнутого двигателя автоматически образует число полюсов, равное числу полюсов статора.
Используется две конструкции двигателей: с несколькими обмотками в каждом пазу статора и с одной обмоткой, секции которой переключаются для получения различного числа пар полюсов.
Многоскоростные двигатели с несколькими независимыми обмотками на статоре по техническим и экономическим показателям уступают многоскоростным однообмоточным. В многообмоточных двигателях неэффективно используется обмотка статора, заполнение паза статора недостаточно, КПД и cos φ ниже оптимальных. Поэтому основное распространение получили многоскоростные однообмоточные двигатели с переключением секций обмотки на различное число пар полюсов.
При переключении секций изменяется распределение МДС в расточке статора. В результате скорость вращения МДС, а следовательно, и магнитного потока тоже изменяется. Наиболее просто осуществляется переключение пар полюсов с отношением 1 : 2. В этом случае обмотки каждой фазы выполняются в виде двух секций. Изменение направления тока в одной из секций позволяет изменить число пар полюсов в два раза.
Рассмотрим схемы обмотки статора двигателя, секции которой переключаются на восемь и четыре полюса. На рис. 9 изображена для простоты обмотка одной фазы. При последовательном соединении двух секций, т. е. при соединении конца первой секции К1 с началом второй Н2, получаем восемь полюсов (рис. 9,а).
Если изменить направление тока во второй секции на обратное, то число полюсов, образуемое обмоткой, уменьшится в два раза и будет равно четырем (рис. 9,б). Направление тока во второй секции может быть изменено переносом перемычки с зажимов К1, Н2 на зажимы К1, К2. Также четыре полюса могут быть получены при параллельном соединении секций (рис. 9, в).
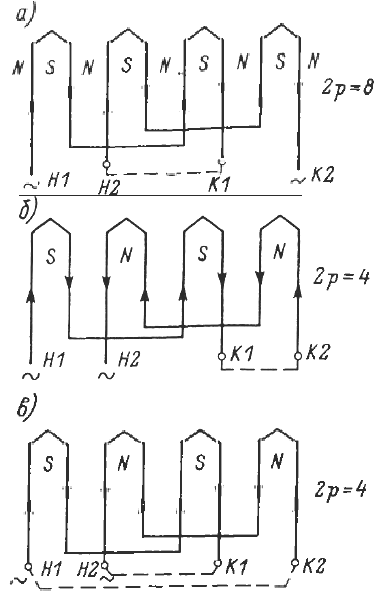
Рис. 9. Переключение секций обмотки статора на различное число пар полюсов
Механические характеристики для двухскоростного двигателя с переключением секций обмотки статора представлены на рис. 10.
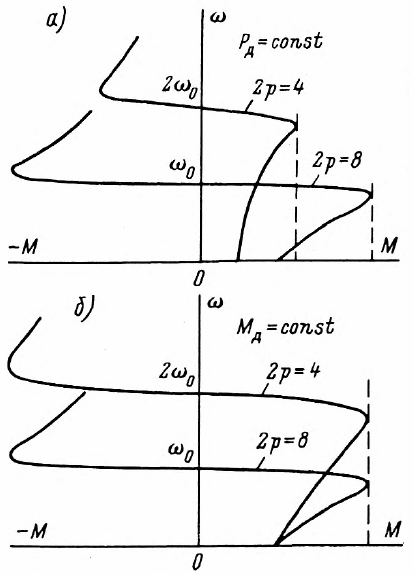
Рис. 10. Механические характеристики асинхронного двигателя при переключении обмотки статора на различное число пар полюсов
При переходе от схемы а к схеме б (рис. 9) на обоих уровнях скорости сохраняется постоянная мощность двигателя (рис. 10,а). При использовании второго варианта переключения двигатель способен развивать один и тот же момент. Возможно переключение секций обмотки статора, обеспечивающее соотношение скоростей не только 1 : 2, но и другие. Промышленностью наряду с двухскоростными двигателями выпускаются также трех- и четырехскоростные.
Частотное управление трехфазными двигателями
Как следует из изложенного, регулирование скорости асинхронного двигателя крайне затруднено. Плавное регулирование скорости в широких пределах с сохранением достаточной жесткости характеристик возможно только при частичном управлении. Изменяя частоту питающего тока, а следовательно, скорость вращения магнитного поля, можно регулировать скорость вращения ротора двигателя.
Однако для частотного управления в установке необходим преобразователь частоты, который был бы в состоянии преобразовать ток постоянной частоты питающей сети 50 Гц в ток переменной регулируемой частоты, плавно изменяющейся в широких пределах.
Первоначально были попытки использования электромашинных преобразователей. Однако, чтобы получить ток переменной частоты от синхронного генератора, необходимо вращать его ротор с переменной скоростью. При этом задачи регулирования скорости рабочего двигателя возлагаются на двигатель, приводящий во вращение синхронный генератор.
Коллекторный генератор, который может генерировать ток переменной частоты при постоянной скорости вращения тоже не позволил решить задачу, так как, во-первых, для его возбуждения необходим ток переменной частоты, а во-вторых, как у всех коллекторных машин переменного тока, возникают большие трудности с обеспечением нормальной коммутации на коллекторе.
Практически частотное управление начало развиваться с появлением полупроводниковых приборов. При этом оказалось возможным создать преобразователи частоты управления как установками большой мощности, так и исполнительными двигателями в следящих системах и сервоприводах.
Наряду со сложностью построения преобразователя частоты возникает еще необходимость одновременного управления по двум величинам — частоте и напряжению. При уменьшении частоты с целью снижения скорости равновесие ЭДС и напряжения сети может быть сохранено только за счет увеличения магнитного потока двигателя. При этом магнитная цепь будет насыщаться, а ток статора — интенсивно нарастать по нелинейному закону. В итоге работа асинхронного двигателя в режиме частотного управления при неизменном напряжении оказывается невозможной.
Уменьшая частоту с целью сохранения неизменным магнитного потока, необходимо одновременно снижать и уровень напряжения. Таким образом, при частотном управлении должны использоваться два канала управления: по частоте и по напряжению.
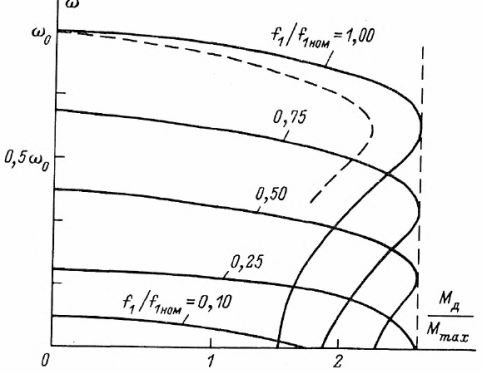
Рис. 11. Механические характеристики асинхронного двигателя при питании напряжением регулируемой частоты и постоянном магнитном потоке
Системы частотного управления обычно строятся как системы замкнутые, и дополнительные сведения о них изложены здесь: Частотное регулирование асинхронного двигателя
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Ранее на эту тему: Электропривод