Механическая характеристика производственного механизма
31. Механическая характеристика производственного механизма
связывает…
а. ускорение и момент сопротивления
б. угловую скорость и момент сопротивления
в. механическую и электрическую мощность
г. ускорение и угловую скорость
32. Подъёмные механизмы имеют механическую характеристику…
а. не зависящую от скорости
б. линейно – возрастающую
в. нелинейно – возрастающую
г. нелинейно – падающую
33. Прессы имею механическую характеристику…
а. не зависящую от скорости
б. линейно – возрастающую
в. нелинейно – возрастающую
г. нелинейно – падающую
34. Вентиляторы и насосы имеют механическую характеристику…
а. не зависящую от скорости
б. линейно – возрастающую
в. нелинейно – возрастающую
г. нелинейно – падающую
35. Металлообрабатывающие станки имеют характеристику…
а. не зависящую от скорости
б. линейно – возрастающую
в. нелинейно – возрастающую
г. нелинейно – падающую
36. Для выбора рационального электропривода необходимо знать…
а. механическую характеристику рабочей машины
б. механическую характеристику электродвигателя
в. механическую характеристику рабочей машины и электродвигателя
г. нагрузочную характеристику рабочей машины
37. Механической характеристикой электродвигателя называется
зависимость между…
а. вращающим моментом электродвигателя и его угловой скоростью
б. моментом сопротивления и угловой скоростью
в. механической и электрической мощностью
г. вращающим моментом электродвигателя и моментом сопротивления
38. У всех электродвигателей скорость является…
а. возрастающей функцией момента двигателя
б. убывающей функцией момента двигателя
в. независящей от момента двигателя
г. нет правильного ответа
Механические характеристики производственных механизмов
САХАЛИНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ИНСТИТУТ ЕСТЕСТВЕННЫХ НАУК И ТЕХНОСФЕРНОЙ БЕЗОПАСНОСТИ
НАПРАВЛЕНИЕ ПОДГОТОВКИ «ЭЛЕКТРОЭНЕРГЕТИКА И ЭЛЕКТРОТЕХНИКА»
Реферат по дисциплине “Электрический привод”
На тему “ Механические характеристики производственных
механизмов”
Выполнил:
студент 5 курса
13.03.02 – Электроэнергетика и
электротехника
Клименок Артём Александрович
Научный руководитель:
к.п.н. Белоусов В.Н.
Южно-Сахалинск 2020
2.
Механические характеристики производственных
механизмов
Зависимость между приведенными к валу двигателя скоростью и моментом
сопротивления ω = f (Мс) называют механической характеристикой
производственного механизма.
Для анализа и классификации различных механических характеристик
воспользуемся следующей эмпирической формулой
Мс — момент сопротивления механизма при скорости ω ;
М0 — момент сопротивления трения в движущихся частях механизма;
Мс ном — момент сопротивления механизма при скорости ωном.
где
Приведенная формула позволяет классифицировать механические
характеристики производственных механизмов на следующие основные
категории:
3.
Механические характеристики производственных
механизмов
1. Механическая характеристика, независящая от скорости ( x = 0 ).
При этом
ω
1
2
0
Мс
Такой характеристикой обладают:
— подъемные краны;
— лебедки;
— механизмы подачи металлорежущих
станков;
— конвейеры и т. д.
2. Линейно-возрастающая механическая характеристика ( x = 1 ).
В этом случае момент сопротивления линейно зависит от скорости
(на рисунке
)
Такая характеристика получится в приводе ГПТ независимого возбуждения,
при его работе на постоянный внешний резистор.
4.
Механические характеристики производственных
механизмов
3. Нелинейно-возрастающая (параболическая) механическая
характеристика ( x = 2 ).
В этом случае момент сопротивления
зависит от квадрата скорости.
ω
4
3
1
Такие механизмы называют иногда
механизмами
с
вентиляторным
моментом .
2
0
К ним относятся: — вентиляторы;
— центробежные насосы;
— гребные винты и т.д.
Мс
4. Нелинейно-спадающая механическая характеристика ( x = -1 ).
Момент сопротивления изменяется обратно пропорционально
скорости, а мощность, потребляемая механизмом, остается постоянной.
Такой характеристикой обладают некоторые токарные, расточные,
фрезерные и другие металлорежущие станки.
5.
Механические характеристики производственных
механизмов
Механической
характеристикой
электродвигателя
называется
зависимость его угловой скорости от вращающего момента, т. е.
ω= f
(М). Почти все электродвигатели обладают спадающей механической
характеристикой.
Степень изменения угловой скорости с изменением момента характеризуется жесткостью механических характеристик:
Жесткость механических характеристик – это отношение разности
электромагнитных моментов двигателя к соответствующей разности угловых
скоростей.
Обычно на рабочих участках механической характеристики электрические
двигатели имеют отрицательную жесткость т. е.
β < 0.
В случае нелинейных механических характеристик жесткость определяется
в каждой точке, как производная момента по угловой скорости
6.
Механические характеристики производственных
механизмов
Существует четыре основных категории механических характеристик
электрических двигателей:
1. Абсолютно жесткая характеристика (β = ∞, т.е. ω = const )
Такой характеристикой обладают
ω
синхронные двигатели.
4
1
2. Жесткая механическая характеристика
(незначительные изменения ω при
2
изменении М)
Такой характеристикой обладают:
3
— ДПТ независимого и параллельного
возбуждения;
— асинхронные двигатели в пределах
0
М
рабочей части характеристики.
3. Мягкая механическая характеристика
(при изменении момента М скорость ω значительно
изменяется)
Такой характеристикой обладают ДПТ последовательного возбуждения.
4. Абсолютно мягкая механическая характеристика (β = 0, т.е. при изменении скорости ω момент двигателя остается неизменным: М = const )
Такой характеристикой обладают ДПТ независимого возбуждения при
питании их от источника тока, т. е. при Ia=const.
2.2. Механические характеристики производственных механизмов и электрических двигателей. Установившиеся режимы
При рассмотрении работы электродвигателя, приводящего в действие производственный механизм, необходимо прежде всего выявить соответствие механических характеристик двигателя характеристике производственного механизма. Поэтому для правильного проектирования и экономичной эксплуатации электропривода необходимо изучить эти характеристики.
Зависимость между приведенными к валу двигателя скоростью и моментом сопротивления механизма ω = = f (Мс) называют механической характеристикой производственного механизма.
Различные производственные механизмы обладают различными механическими характеристиками. Однако можно получить некоторые обобщающие выводы, если воспользоваться следующей эмпирической формулой для механической характеристики производственного механизма:

(2.16)
где MС — момент сопротивления производственного механизма при скорости ω; М0 — момент сопротивления трения в движущихся частях механизма; Мс,ном — момент сопротивления при номинальной скорости ωном; х — показатель степени, характеризующий изменение момента сопротивления при изменении скорости.
Приведенная формула позволяет классифицировать механические характеристики производственных механизмов ориентировочно на следующие основные категории:
1. Н е зависящая от скорости механическая характеристика (прямая 1 на рис. 2.4). При этом х = 0 и момент сопротивления Мс не зависит от скорости. Такой характеристикой обладают, например, подъемные краны, лебедки, механизмы подач металлорежущих станков, поршневые насосы при неизменной высоте подачи, конвейеры с постоянной массой передвигаемого материала. Сюда же могут быть отнесены с известным приближением все механизмы, у которых основным моментом сопротивления является момент трения, так как обычно в пределах рабочих скоростей момент трения изменяется мало.
2. Л и н е и н о — возрастающая механиче ская характеристика (прямая 2 на рис. 2.4). В этом случае х= 1 и момент сопротивления линейно за висит от скорости ω, увеличиваясь с ее возрастанием (для упрощения принято М0 = 0).
Такая характеристика получится, например, в приводе генератора постоянного тока с независимым возбуждением, если последний будет работать на постоянный внешний резистор.
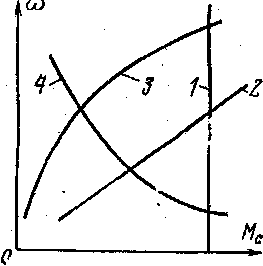
3. Нелинейно-возрастающая (парабо- лическа я) механическая характеристи- к а (кривая 3 на рис. 2.4). Этой характеристике соответст вует х = 2; момент сопротивления Мс здесь зависит от квадрата скорости. Механизмы, обла дающие такой характеристикой, назы вают иногда механизмами с вентиля торным моментом, поскольку у вен тиляторов момент сопротивления за висит от квадрата скорости. К меха-
Рис. 2.4. Механические характеристики производственных механизмов.
низмам, обладающим параболической механической характеристикой, относятся также центробежные насосы, гребные винты и т. п.
4. Нелинейно-спадающая механическая характеристика (кривая 4 на рис. 2.4). При этом х = –1 и момент сопротивления MС изменяется обратно пропорционально скорости, а мощность, потребляемая механизмом, остается постоянной. Такой характеристикой обладают, например, некоторые токарные, расточные, фрезерные и другие металлорежущие станки, моталки в металлургической промышленности и т. п. Эти характеристики не исчерпывают всех практически возможных случаев, но дают представление о характеристиках некоторых типичных производственных механизмов.
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента, т.е. ω = f(М). Почти все электродвигатели обладают тем свойством, что скорость их является убывающей функцией момента двигателя.
Это относится почти ко всем обычным электродвигателям, применяемым в промышленности, т. е. к двигателям постоянного тока независимого, последовательного и смешанного возбуждения, а также к асинхронным бесколлекторным и коллекторным двигателям переменного тока. Однако степень изменения скорости с изменением момента у разных двигателей различна и характеризуется так называемой жесткостью их механических характеристик. Жесткость механической характеристики электропривода — это отношение разности электромагнитных моментов, развиваемых электродвигательным устройством, к соответствующей разности угловых скоростей электропривода, т. е.

(2.17)

(2.18)
Понятие жесткости может быть применено и к механическим характеристикам производственных механизмов. Эти характеристики можно оценивать жесткостью

(2.19)
Механические характеристики электродвигателей можно разделить на четыре основные категории:
- Абсолютно жесткая механическая характеристика (β= ∞) — это характеристика, при которой скорость с изменением момента остается неизменной. Такой характеристикой обладают синхронные двигатели (прямая 1 на рис. 2.5).
- Жесткая механическая характери стика — это характеристика, при которой скорость с изменением момента хотя и уменьшается, но в малой степени. Жесткой механической характеристикой обладают двигатели постоянного тока независимого возбуждения, а также асинхронные двигатели в пределах рабочей части механической характеристики (кривая 2 на рис. 2.5).
Для асинхронного двигателя жесткость в различных точках механической характеристики различна (рис. 2.6). Между максимальными (критическими) значениями моментов в двигательном MК,Д и генераторном МК,Г режимах характеристика асинхронного двигателя имеет сравнительно большую жесткость. 3. Мягкая механическая характеристика — это характеристика, при которой с изменением момента скорость значительно изменяется. Такой характеристикой обладают двигатели постоянного тока последовательного возбуждения, особенно в зоне малых моментов (кривая 3 на рис. 2.5). Для этих двигателей жесткость не остается постоянной для всех точек характеристик. Двигатели постоянного тока смешанного возбуждения могут быть отнесены ко второй или третьей группе в зави- 
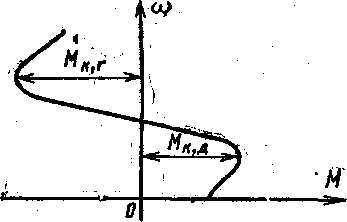 Рис. 2.5. Механические теристики двигателей. харак- Рис. 2.6. Механическая харак- теристика асинхронного двигателя. симости от значения жесткости механической характери стики. 4. Абсолютно мягкая механическая характеристика (β = 0) — это характеристика, при которой момент двигателя с изменением угловой скорости остается неизменным. Такой характеристикой обладают, например, двигатели постоянного тока независимого возбуждения при питании их от источника тока или при работе в замкнутых системах электропривода в режиме стабилизации тока якоря (прямая 4 на рис. 2.5). Работе электрического двигателя и производственного механизма в установившемся режиме соответствует равновесие момента сопротивления механизма и вращающего момента двигателя при определенной скорости, т. е. М=МС. Изменение момента сопротивления на валу двигателя приводит к тому, что скорость двигателя и момент, который он развивает, могут автоматически изменяться и привод будет продолжать устойчиво работать при другой скорости с новым значением момента. Для восстановления равновесия между изменившимся моментом сопротивления и моментом двигателя во всех неэлектрических двигателях требуется участие специальных регуляторов, которые воздействуют на источник энергии, увеличивая или соответственно уменьшая подачу воды, топлива или пара. В электрических двигателях роль автоматического регулятора может выполнять ЭДС двигателя. Эта особенность электродвигателей автоматически поддерживать равновесие системы при изменяющемся моменте сопротивления является весьма ценным свойством, так как во многих случаях момент может изменяться в той или иной степени. Изложенное иллюстрируется рис. 2.7, где приведены механическая характеристика 3 двигателя постоянного тока независимого возбуждения и две характеристики 1 и 2 производственного механизма, например конвейера, приводимого в движение этим двигателем 1. Характеристика 1 соответствует моменту сопротивления М1 при холостом ходе конвейера. Характеристика 2 получается при большом моменте сопротивления M2 после того, как на конвейер положены транспортируемые .им детали. Вначале при холостом ходе конвейера М = М1двигатель работает со скоростью ω1. С увеличением нагрузки двигатель тормозится, скорость его снижается, благодаря чему уменьшается ЭДС. При уменьшении ЭДС возрастают ток в якорной цепи двигателя и момент, развиваемый двигателем. Рост момента двигателя продолжается до тех пор, пока не наступит равновесие моментов М = М2 (точка ω2). Эта новая точка также является общей для механической характеристики конвейера (2) и механической характеристики электродвигателя (3). Рассмотренные условия работы электропривода в установившемся режиме характеризуют статическую устойчивость привода, когда изменение во времени скорости и момента происходит относительно медленно в отличие от динамической устойчивости, имеющей место при переходных режимах. Под статической устойчивостью понимается такое состояние установившегося режима ра-
Рис. 2.5. Механические теристики двигателей. харак- Рис. 2.6. Механическая харак- теристика асинхронного двигателя. симости от значения жесткости механической характери стики. 4. Абсолютно мягкая механическая характеристика (β = 0) — это характеристика, при которой момент двигателя с изменением угловой скорости остается неизменным. Такой характеристикой обладают, например, двигатели постоянного тока независимого возбуждения при питании их от источника тока или при работе в замкнутых системах электропривода в режиме стабилизации тока якоря (прямая 4 на рис. 2.5). Работе электрического двигателя и производственного механизма в установившемся режиме соответствует равновесие момента сопротивления механизма и вращающего момента двигателя при определенной скорости, т. е. М=МС. Изменение момента сопротивления на валу двигателя приводит к тому, что скорость двигателя и момент, который он развивает, могут автоматически изменяться и привод будет продолжать устойчиво работать при другой скорости с новым значением момента. Для восстановления равновесия между изменившимся моментом сопротивления и моментом двигателя во всех неэлектрических двигателях требуется участие специальных регуляторов, которые воздействуют на источник энергии, увеличивая или соответственно уменьшая подачу воды, топлива или пара. В электрических двигателях роль автоматического регулятора может выполнять ЭДС двигателя. Эта особенность электродвигателей автоматически поддерживать равновесие системы при изменяющемся моменте сопротивления является весьма ценным свойством, так как во многих случаях момент может изменяться в той или иной степени. Изложенное иллюстрируется рис. 2.7, где приведены механическая характеристика 3 двигателя постоянного тока независимого возбуждения и две характеристики 1 и 2 производственного механизма, например конвейера, приводимого в движение этим двигателем 1. Характеристика 1 соответствует моменту сопротивления М1 при холостом ходе конвейера. Характеристика 2 получается при большом моменте сопротивления M2 после того, как на конвейер положены транспортируемые .им детали. Вначале при холостом ходе конвейера М = М1двигатель работает со скоростью ω1. С увеличением нагрузки двигатель тормозится, скорость его снижается, благодаря чему уменьшается ЭДС. При уменьшении ЭДС возрастают ток в якорной цепи двигателя и момент, развиваемый двигателем. Рост момента двигателя продолжается до тех пор, пока не наступит равновесие моментов М = М2 (точка ω2). Эта новая точка также является общей для механической характеристики конвейера (2) и механической характеристики электродвигателя (3). Рассмотренные условия работы электропривода в установившемся режиме характеризуют статическую устойчивость привода, когда изменение во времени скорости и момента происходит относительно медленно в отличие от динамической устойчивости, имеющей место при переходных режимах. Под статической устойчивостью понимается такое состояние установившегося режима ра-  1 Механические характеристики производственного механизма для удобства изображаются в первом квадранте, хотя момент сопротивления имеет отрицательный знак. боты привода, когда при случайно возникшем отклонении скорости от установившегося значения привод возвратится в точку установившегося режима. При неустойчивом движении любое, даже самое малое, отклонение скорости от установившегося значения приводит к изменению состояния привода — он не возвращается в точку установившегося режима. Привод статически устойчив, если в точке установившегося режима выполняется условие
1 Механические характеристики производственного механизма для удобства изображаются в первом квадранте, хотя момент сопротивления имеет отрицательный знак. боты привода, когда при случайно возникшем отклонении скорости от установившегося значения привод возвратится в точку установившегося режима. При неустойчивом движении любое, даже самое малое, отклонение скорости от установившегося значения приводит к изменению состояния привода — он не возвращается в точку установившегося режима. Привод статически устойчив, если в точке установившегося режима выполняется условие  или (2.20)
или (2.20)  (2.21) Условие (2.20) означает, что привод статически устойчив, если при положительном приращении угловой ско-
(2.21) Условие (2.20) означает, что привод статически устойчив, если при положительном приращении угловой ско-  0MiМ •»ILi Рис. 2.7. Механические характеристики двигателя постоянного тока независимого возбуждения и приводимого им механизма. Рис. 2.8. К определению статической устойчивости привода при постоянном моменте сопротивления и вентиляторной нагрузке. рости момент двигателя окажется меньше статического момента (момента сопротивления) и привод вследствие этого затормозится до прежнего значения скорости. При отрицательном приращении угловой скорости момент двигателя окажется больше момента сопротивления и привод вследствие этого разгонится до прежнего значения скорости. При постоянном моменте нагрузки (прямая 1 на рис. 2.4) статическая устойчивость будет определяться только жесткостью механической характеристики двигателя, так как
0MiМ •»ILi Рис. 2.7. Механические характеристики двигателя постоянного тока независимого возбуждения и приводимого им механизма. Рис. 2.8. К определению статической устойчивости привода при постоянном моменте сопротивления и вентиляторной нагрузке. рости момент двигателя окажется меньше статического момента (момента сопротивления) и привод вследствие этого затормозится до прежнего значения скорости. При отрицательном приращении угловой скорости момент двигателя окажется больше момента сопротивления и привод вследствие этого разгонится до прежнего значения скорости. При постоянном моменте нагрузки (прямая 1 на рис. 2.4) статическая устойчивость будет определяться только жесткостью механической характеристики двигателя, так как  Если она отрицательна, то работа в уста- новившемся режиме устойчива
Если она отрицательна, то работа в уста- новившемся режиме устойчива  как это имело место в рассмотренном случае (рис. 2.7). Если же использовать асинхронный двигатель с ко-роткозамкнутым ротором и нагрузить его постоянным моментом (рис. 2.8), то в точке а
как это имело место в рассмотренном случае (рис. 2.7). Если же использовать асинхронный двигатель с ко-роткозамкнутым ротором и нагрузить его постоянным моментом (рис. 2.8), то в точке а = —А/В — 0 < 0, т. е. устойчивый режим, а в точке б
= —А/В — 0 < 0, т. е. устойчивый режим, а в точке б = А/C — 0 > 0, т. е. режим неустойчивый. При работе того же двигателя на механизм с вентиляторной характеристикой (рис. 2.8) легко доказать, что во всех точках работа будет устойчивой. Обычно при проектировании электропривода механическая характеристика производственного механизма является уже заданной. Поэтому для получения устойчивой работы в установившемся режиме для определенных скоростей и моментов сопротивления производственных механизмов необходимо подбирать механическую характеристику электродвигателя соответствующей формы. Это может быть достигнуто подбором электродвигателя соответствующего типа и изменением электрических параметров его цепей. Иногда для получения требуемых механических характеристик приходится применять специальные схемы включения электрических машин и аппаратов. 2.1. Уравнение движения электропривода Выше были рассмотрены условия работы электропривода в установившемся режиме, когда момент, развиваемый двигателем, равен моменту сопротивления механизма и скорость привода является постоянной. Однако во многих случаях привод ускоряется или замедляется, и тогда возникает инерционная сила или инерционный момент, которые двигатель должен преодолевать, находясь в переходном режиме. Таким образом, переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток. Причинами возникновения переходных режимов в электроприводах является либо изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т. е. пуск, торможение, изменение направления вращения и т. п. Переходные режимы в электроприводах могут возникнуть также в ре- зультате аварий или нарушения нормальных условий электроснабжения (например, изменения напряжения или частоты сети, несимметрия напряжения и т. п.). Уравнение движения электропривода должно учитывать все силы и моменты, действующие в переходных режимах. При поступательном движении движущая сила F всегда уравновешивается силой сопротивления машины Fc и инерционной силой
= А/C — 0 > 0, т. е. режим неустойчивый. При работе того же двигателя на механизм с вентиляторной характеристикой (рис. 2.8) легко доказать, что во всех точках работа будет устойчивой. Обычно при проектировании электропривода механическая характеристика производственного механизма является уже заданной. Поэтому для получения устойчивой работы в установившемся режиме для определенных скоростей и моментов сопротивления производственных механизмов необходимо подбирать механическую характеристику электродвигателя соответствующей формы. Это может быть достигнуто подбором электродвигателя соответствующего типа и изменением электрических параметров его цепей. Иногда для получения требуемых механических характеристик приходится применять специальные схемы включения электрических машин и аппаратов. 2.1. Уравнение движения электропривода Выше были рассмотрены условия работы электропривода в установившемся режиме, когда момент, развиваемый двигателем, равен моменту сопротивления механизма и скорость привода является постоянной. Однако во многих случаях привод ускоряется или замедляется, и тогда возникает инерционная сила или инерционный момент, которые двигатель должен преодолевать, находясь в переходном режиме. Таким образом, переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток. Причинами возникновения переходных режимов в электроприводах является либо изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т. е. пуск, торможение, изменение направления вращения и т. п. Переходные режимы в электроприводах могут возникнуть также в ре- зультате аварий или нарушения нормальных условий электроснабжения (например, изменения напряжения или частоты сети, несимметрия напряжения и т. п.). Уравнение движения электропривода должно учитывать все силы и моменты, действующие в переходных режимах. При поступательном движении движущая сила F всегда уравновешивается силой сопротивления машины Fc и инерционной силой  , возникающей при изменениях скорости. Если масса тела т выражена в килограммах, а скорость v — в метрах в секунду, то сила инерции, как и другие силы, действующие в рабочей машине, измеряются в ньютонах (кг∙м∙с -2 ). В соответствии с изложенным уравнение равновесия сил при поступательном движении записывается так: F—Fс=m
, возникающей при изменениях скорости. Если масса тела т выражена в килограммах, а скорость v — в метрах в секунду, то сила инерции, как и другие силы, действующие в рабочей машине, измеряются в ньютонах (кг∙м∙с -2 ). В соответствии с изложенным уравнение равновесия сил при поступательном движении записывается так: F—Fс=m . (2.22) Аналогично уравнение равновесия моментов, Н∙м, для вращательного движения (уравнение движения привода) имеет следующий вид:
. (2.22) Аналогично уравнение равновесия моментов, Н∙м, для вращательного движения (уравнение движения привода) имеет следующий вид:  (2.23) Уравнение (2.23) показывает, что развиваемый двигателем вращающий момент М уравновешивается моментом сопротивления Мc на его валу и инерционным или динамическим моментом J
(2.23) Уравнение (2.23) показывает, что развиваемый двигателем вращающий момент М уравновешивается моментом сопротивления Мc на его валу и инерционным или динамическим моментом J (2.22) и (2.23) принято, что масса тела т и соответственно момент инерции привода J являются постоянными, что справедливо для значительного числа производственных механизмов. Из анализа (2.23) видно: 1) при М >Мсdω/dt > 0, т. е. имеет место ускорение привода; 2) при М< Мсdω/dt< 0, т. е. имеет место замедле ние привода (очевидно, что замедление привода может быть и при отрицательном значении момента двигателя); 3) при М = Мсdω/dt = 0; в данном случае привод работает в установившемся режиме. Вращающий момент, развиваемый двигателем при работе, принимается положительным, если он направлен в сторону движения привода. Если он направлен в сторону обратную движению, то он считается отрицательным. Отметим, что знак минус перед Мс указывает на тормозящее действие момента сопротивления, что отвечает усилию резания, потерям трения, подъему груза, сжатию пружины и т. п. при положительном знаке скорости. При спуске груза, раскручивании или разжатии пружины и т. п. перед МС ставится знак плюс, поскольку в этих случаях момент сопротивления помогает вращению привода. Инерционный (динамический) момент (правая часть уравнения моментов) проявляется только во время переходных режимов, когда изменяется скорость привода. При ускорении привода этот момент направлен против движения, а при торможении он поддерживает движение. Инерционный момент как по значению, так и по знаку определяется алгебраической суммой моментов двигателя и момента сопротивления. При учете сказанного о знаках моментов формула (2.23) соответствует работе двигателя в двигательном режиме при реактивном моменте сопротивления (или при потенциальном тормозящем моменте сопротивления). В общем виде уравнение движения привода может быть записано следующим образом:
(2.22) и (2.23) принято, что масса тела т и соответственно момент инерции привода J являются постоянными, что справедливо для значительного числа производственных механизмов. Из анализа (2.23) видно: 1) при М >Мсdω/dt > 0, т. е. имеет место ускорение привода; 2) при М< Мсdω/dt< 0, т. е. имеет место замедле ние привода (очевидно, что замедление привода может быть и при отрицательном значении момента двигателя); 3) при М = Мсdω/dt = 0; в данном случае привод работает в установившемся режиме. Вращающий момент, развиваемый двигателем при работе, принимается положительным, если он направлен в сторону движения привода. Если он направлен в сторону обратную движению, то он считается отрицательным. Отметим, что знак минус перед Мс указывает на тормозящее действие момента сопротивления, что отвечает усилию резания, потерям трения, подъему груза, сжатию пружины и т. п. при положительном знаке скорости. При спуске груза, раскручивании или разжатии пружины и т. п. перед МС ставится знак плюс, поскольку в этих случаях момент сопротивления помогает вращению привода. Инерционный (динамический) момент (правая часть уравнения моментов) проявляется только во время переходных режимов, когда изменяется скорость привода. При ускорении привода этот момент направлен против движения, а при торможении он поддерживает движение. Инерционный момент как по значению, так и по знаку определяется алгебраической суммой моментов двигателя и момента сопротивления. При учете сказанного о знаках моментов формула (2.23) соответствует работе двигателя в двигательном режиме при реактивном моменте сопротивления (или при потенциальном тормозящем моменте сопротивления). В общем виде уравнение движения привода может быть записано следующим образом:  (2.23a) Выбор знаков перед значениями моментов в (2.23а) зависит от режима работы двигателя и характера моментов сопротивления.
(2.23a) Выбор знаков перед значениями моментов в (2.23а) зависит от режима работы двигателя и характера моментов сопротивления.
Механические характеристики электродвигателей и производственных механизмов

Механические характеристики любых механизмов играют важную роль во время конструирования электропривода, ведь любая деталь влияет на его работу.
Механическая характеристика – это зависимость нескольких факторов между собой. В случае характеристики механизма, то это пропорция угловой скорости на момент сопротивления механизма.
Существует порядка четырёх видов характеристик механизмов:
- Х-ка с моментом сопротивления (который никак не связан с темпом). Пример: подъемные краны, лебедки и прочее.
- Х-ка с моментом сопротивления, который связан со скоростью (линейная зависимость). Пример: генератор постоянного тока.
- Х-ка с нелинейным ростом момента сопротивления. Пример: вентилятор, гребной винт.
- Х-ка со спадающим сопротивлением (нелинейно). Пример: токарный станок.
Характеристика электродвижка — отношение угловой скорости к вращающему моменту. Для того чтобы оценить свойства характеристик существует их жёсткость.
Мягкая характеристика — темп сильно меняется при слабом изменении загрузки. Примером может быть двигатель с постоянным типом напряжения.
Жесткая характеристика — темп меняется при меняющейся загрузке. Пример: движок постоянного тока (синхронное возбуждение).
Абсолютно жесткая характеристика — константный темп оборотов движка во время меняющейся загрузки мотора. Пример: синхронный двигатель.
Естественная механическая характеристика — когда двигатель работает в условиях исходных параметров. Двигатель каждого вида имеет только одну такую характеристику. В отличие от других, которые имеют бесконечное число.