Скалярное управление электродвигателем
Скалярное управление (частотное) — метод управления бесщеточным электродвигателем переменного тока, который заключается в том, чтобы поддерживать постоянным отношение напряжение/частота (В/Гц) во всем рабочем диапазоне скоростей, при этом контролируется только величина и частота питающего напряжения.
Отношение В/Гц вычисляется на основе номинальных значений (напряжения и частоты) контролируемого электродвигателя переменного тока. Поддерживая постоянным значение отношения В/Гц мы можем поддерживать относительно постоянным магнитный поток в зазоре двигателя. Если отношение В/Гц увеличивается тогда электродвигатель становится перевозбужденным и наоборот если отношение уменьшается двигатель находится в недовозбужденном состоянии.
Зависимость частоты питания двигателя от времени при скалярном упрравлении
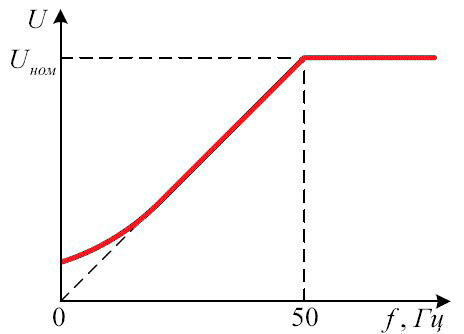
Изменение напряжения питания электродвигателя при скалярном управлении
На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение В/Гц на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями.
В применении к асинхронным двигателям
При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение В/Гц должно быть постоянным на разных скоростях.
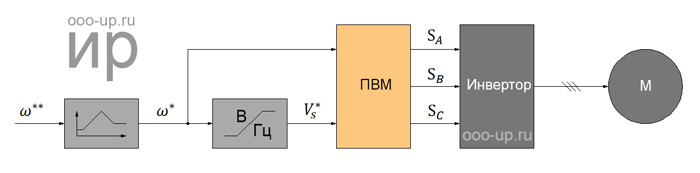
Скалярное управление без датчика скорости
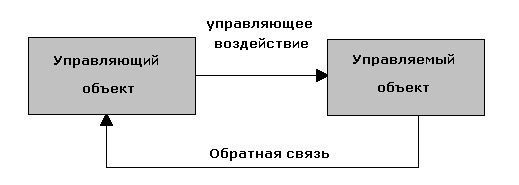
При увеличении скорости напряжение питания статора так же должно пропорционально увеличиваться. Однако синхронная частота асинхронного двигателя не равна частоте вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом система контроля со скалярным управлением без обратной связи не может точно контролировать скорость при наличии нагрузки. Для решения этой задачи в систему может быть добавлена обратная связь по скорости, а следовательно и компенсация скольжения [2].
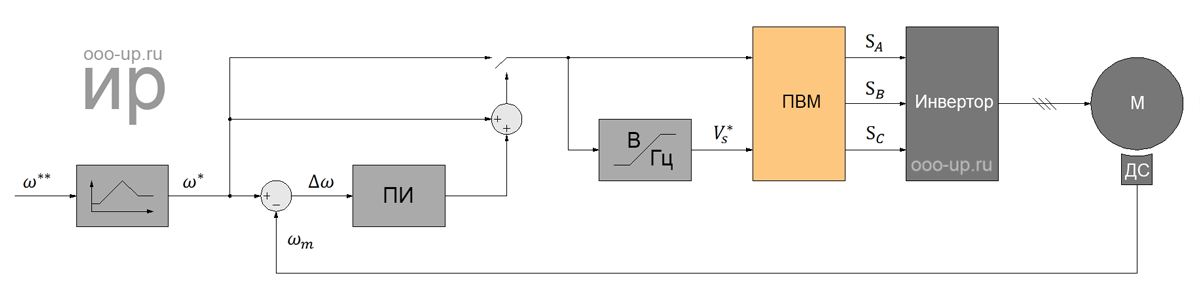
Скалярное управление с датчиком скорости
Когда используется
Скалярное управление электродвигателями переменного тока — хорошая альтернатива для приложений, где нет переменной нагрузки и не требуется хорошая динамика (вентиляторы, насосы). Для работы скалярного управления не требуется датчик положения ротора, а скорость ротора может быть оценена по частоте питающего напряжения. Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
Недостатки скалярного управления
При скалярном управлении электродвигателем токи статора не контролируются напрямую.
СДПМ со скалярным методом управления может легко стать неуправляемым (выйти из синхронного состояния) особенно когда момент нагрузки превышает значение предельного момента электропривода. Скалярный метод не подходит для контроля СДПМ на низких оборотах для приложений, требующих высокую динамику [1].
Скалярное управление достаточно для большинства задач в которых применяется электропривод с диапазоном регулирования частоты вращения двигателя до 1:10.
Когда требуется максимальное быстродействие, возможность регулирования в широком диапазоне скоростей и возможность управления моментом электродвигателя используется векторное управление.
Векторный или скалярный преобразователи частоты?

Вопрос выбора векторного или скалярного преобразователя рано или поздно встает перед каждым пользователем, который заинтересован в покупке электропривода переменного тока.Производители уже давно утвердили определенные стандарты, на основе которых создаются преобразователи частоты и формируются их функции.
Помимо существенного ценового различия (векторные более дорогие) скалярные и векторные преобразователи отличаются и в техническом плане. Однако для того, чтобы понять все технические особенности каждого типа, необходимо углубиться в тему и изучить понятия, давшие названия частотным преобразователям. Характеризовать преобразователь частоты с помощью указанных выше терминов представляется не совсем правильно. Особенно это касается понятия «скалярный». Здесь необходимо вспомнить элементарную физику. Скалярной называется величина со значением в виде одного числа, то есть все значения могут быть изображены линейно. Это позволяет отнести длину, время, площадь, температуру к скалярным показателям. Векторы в отличие от скаляр имеют не только число, но и направление. Именно поэтому относить эти термины к преобразователям частоты может быть некорректно. Основная причина такой классификации может быть связана с желанием увеличить достоинства каждой модели и, соответственно, ее стоимость.
Здесь важно изучить технический вопрос. Вращающий момент вала в электродвигателе корректируется, когда изменяется величина и частота тока обмоток. В результате сила магнитного поля статора также изменяется. Большая часть моделей преобразователей производятся с учетом возможности настройки электрических показателей для различных типов оборудования. В качестве примера, выходной ток может быть линейным, параболической или гиперболической формы. Это зависит от того, какую величину будет иметь момент инерции оборудования. Гиперболическая форма будет у выходного тока, который используется для привода в движение большой массы транспортера. Параболическая кривая способствует началу движения вентиляторов и водяных насосов. Таким образом, можно сэкономить электроэнергию. Такая схема работы характерна для большинства частотников скалярного типа. Существует еще один способ увеличить момент на валу в электродвигателе. Для этого применяется третья гармоника выходного тока с вектором прямой последовательности (вращается с вектором тока главной гармоники в одном направлении). Для других гармоник характерно обратное направление работы. В ходе работы этой схемы увеличивается мощность выходного тока и момент на валу.
Векторный частотник появился с развитием технологий, которые позволили управлять моментом по-новому. А именно, стала использоваться как сила и частота, так и фаза тока. Первые модели векторного преобразователя частоты функционировали на основе измерения показателей напряжения и выходного тока, таким образом можно было вычислить необходимый сдвиг фазы. Однако серьёзных результатов в изучении этой области не было достигнуто. Положительный опыт был получен только после того, как был введен контур обратной связи, контролирующий положение ротора. Так, в режиме реального времени вычислялась скорость, с которой должно вращаться магнитное поле статора. В результате стала возможной оптимизация стабильного момента вращения с учетом применения еще одного сдвига фазы.
Таким образом, можно выделить основное различие между скалярным и векторным преобразователями. В скалярном частотнике управляется и контролируется магнитное поле только статора, а в векторном преобразователе значение имеет взаимодействие магнитных полей статора и ротора, что способно оптимизировать момент вращения при работе на разной скорости.
Основная задача производителей векторного частотного преобразователя – обеспечение высокого момента при малой скорости вращения. В данном случае компенсация потери момента из-за невысокой скорости осуществлялась за счет повышения тока и улучшения взаимодействия магнитных полей. 100% достижение этой цели привело бы к тому, что частотно регулируемый привод стал сервоприводом с высоким постоянным моментом при любой скорости. Однако достичь подобного результата чрезвычайно сложно. Именно поэтому векторные частотные преобразователи сегодня не обладают достаточным количеством преимуществ, особенно если Вы работаете с малыми скоростями вращения. Стоит также отметить, что сочетание повышенного тока и небольших скоростей приводит серьезному перегреву двигателя, поэтому в данной системе обязательно использование внешнего вентилятора обдува.
С развитием технологий результативность или нерезультативность работы векторного ЧП будет подтверждена. Но на данный момент векторные преобразователи не отличаются серьезными преимуществами и надежностью, как и любая усложненная система. Кроме того, по сравнению со скалярными преобразователями векторные не могут использоваться в работе многодвигательных приводов.
Векторное и скалярное управление преобразователем частоты
Значительная доля всей генерируемой в мире электроэнергии потребляется двигателями переменного тока. Управление частотой питающего напряжения и тока позволяет снизить энергопотребление на 40-70%, а также повысить КПД и увеличить производительность оборудования.
Правильно подобрать способ управления – одна из главных задач проектировщика, правильное ее решение обеспечивает максимальный технико-экономический эффект. Рассмотрим достоинства и недостатки скалярного управления.
Способы управления
Наибольшее распространение в электроприводах двигателей до 1 кВ получили преобразователи частоты со звеном постоянного тока. Регулирование частоты напряжения в таких устройствах достигается изменением циклов отпирания/запирания транзиторных ключей путем изменения длительности управляющих импульсов широтно-импульсного модулятора ШИМ.
Различают 2 способа управления:
Первый метод заключается в поддержании отношения величины, частоты и фазы напряжения питания двигателя. Такой способ позволяет регулировать скорость вращения вала в широком диапазоне, управлять моментом, обеспечивать жесткость механических характеристик во всем интервале частот, осуществлять пуск со значительной нагрузкой.
Однако, такой метод имеет свои недостатки. Главный из них – значительная вычислительная сложность. Векторные преобразователи частоты комплектуются высокопроизводительными контроллерами, что ведет к значительному удорожанию ПЧ. Такое оборудование используется в приводах механизмов с динамической нагрузкой, грузоподъемных устройств, точных механизмов и т.д.
Принцип скалярного или вольт-частотного управления заключается в поддержании постоянного числа U/f (скалярной величины и частоты напряжения питания) при любой угловой частоте вращения вала. При этом контролируется только величина и фаза напряжения на выходе частотного преобразователя. Рассмотрим принцип и виды скалярного регулирования подробнее.
Виды скалярного управления
Поддержание постоянной величины U/f обеспечивает относительно постоянный магнитный поток в зазоре двигателя. Если отношение напряжение/частота растет, электродвигатель переходит в перевозбужденное состояние, если снижается – электрическая машина приходит в невозбужденном состоянии.
Отношение U/f вычисляется из номинальных величин напряжения и частоты двигателя, фаза при этом не учитывается, таким образом, вычислительная сложность для устройства управления ШИМ не велика. Скалярные ПЧ комплектуют простыми контроллерами.
Различают 2 метода скалярного управляния:
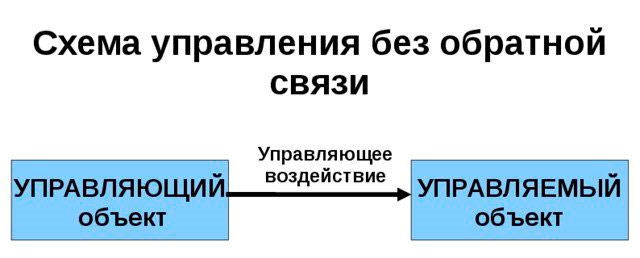
- Без обратной связи.
- С обратной связью по скорости вала.
Вольт-частотный способ без обратной связи широко применяется в схемах управления асинхронными электродвигателями, в приводе оборудования, работающего с постоянной нагрузкой.
Благодаря простой конструкции без датчиков обратной связи, невысоких требований к вычислительной способности управляющего блока, относительной низкой стоимости, такие ПЧ массово используються в несложных электроприводах. Скалярный метод позволяет реализовать групповое управление однотипными электродвигателями с одновременным пуском и остановкой.
Вольт-частотный способ управления с энкодером (датчиком оборотов или скорости) позволяет существенно расширить возможности метода. При этом величина U/f поддерживается при различных скоростях.
При возрастании угловой частоты вращения вала, напряжение на обмотках статора двигателя также должно увеличиваться. Однако, в асинхронных электрических машинах частота вращения магнитного поля статора не совпадает со скоростью вала. Скольжение при этом зависит от нагрузки. Для компенсации скольжения в схему электропривода добавляют датчик скорости или энкодер. Обратная связь позволяет повысить точность поддержания скорости до 0,03%. Таким образом, скалярное управления с энкодером позволяет устранить недостаточную точность регулирования угловой частоты вала.
К недостаткам метода относятся усложнение схемы, необходимость монтажа и настройки энкодера.
Преимущества и недоставки скалярного способа управления
Главное достоинство вольт-частотных ПЧ – простота и невысокая стоимость. Цена такого оборудования значительно меньше векторных преобразователей частоты. В схемах управления не нужно устанавливать датчик скорости на вал. Настройка скалярного преобразователя частоты также намного проще. Такие устройства также позволяют управлять несколькими электродвигателями.
Один из недостатков вольт-частотного управления – зависимость скорости вала от нагрузки. Без обратной скорости невозможно компенсировать скольжение ротора. Такое оборудование также не позволяет управлять частотой вращения и моментом на валу одновременно. Скалярные частотные преобразователи также не обладают высокой перегрузочной способностью. Еще один существенный недостаток – потеря жесткости механических характеристик на небольших скоростях.
Сфера применения
Несмотря на совершенствование векторного способа управления, скалярные частотные преобразователи по-прежнему широко используются. Область применение таких ПЧ – электроприводы различного назначения с постоянной или изменяющейся по известному закону нагрузкой.
Применение вольт-частотных преобразователей в вентиляционном и насосном оборудовании позволяет:
- Осуществлять управление потоком воздуха или давлением и расходом жидкостей без механических заслонок и задвижек.
- Осуществлять плавный пуск и остановку без риска гидравлических ударов в системе.
- Автоматически пропускать резонансные частоты при управлении воздухообменными установками.
При помощи скалярных преобразователей можно задать режимы работы насосного или воздуходувного оборудования по известным законам регулирования.
Установка ПЧ в приводе станков:
- Существенно упрощает кинематическую схему, частотное управление позволяет отказаться от передаточных механизмов.
- Увеличивает точность обработки, при точном задании скорости существенно снижется количество брака.

Преобразователи частоты снижают стоимость производства путем снижения расходов на электроэнергию.
ПЧ также устанавливают на двигатели конвейеров и других механизмов подачи. Это позволяет:
- Точно задавать скорость перемещения под конкретные технологические процессы.
- Осуществлять остановку при возникновении аварий.
- Исключить удары и рывки при пуске, работе и остановке.

Преобразователи частоты снижают износ механических узлов конвейерного оборудования, а также позволяют задавать режимы автоматического управления в зависимости от специфики производственных процессов.
Заключение
Выбор метода управления осуществляется на основании технических требований и экономических расчетов. Недорогие скалярные частотные преобразователи применяются в двигателях оборудования с постоянной нагрузкой, невысокими требованиями к перегрузочной способности, при отсутствии необходимости одновременной регулировки скорости и момента, а также точного регулирования скорости при оборотах ниже номинального значения.
Векторные преобразователи используют в приводах оборудования с высокодинамичной нагрузкой, при необходимости точного позиционирования, пуска с высоким моментом и в других сложных условиях.
Методы регулирования, используемые в преобразователях частоты для управления двигателями переменного тока

В настоящее время, управление скоростью двигателей переменного тока с помощью преобразователей частоты широко применяется практически во всех отраслях промышленности.
На практике, применяются системы регулирования скорости трехфазных двигателей переменного тока на основе двух разных принципов управления:
1. U/f- регулирование (вольт-частотное или скалярное управление);
2. Векторное управление.
Методы регулирования, используемые в преобразователях частоты для управления двигателями переменного тока
В настоящее время, управление скоростью двигателей переменного тока с помощью преобразователей частоты широко применяется практически во всех отраслях промышленности. Это, прежде всего, связано с большими достижениями в области силовой электроники и микропроцессорной техники, на основе которых были разработаны частотные преобразователи. С другой стороны, унификация производства преобразователей частоты производителями, позволила достаточно сильно повлиять на их стоимость и сделала их окупаемыми в достаточно короткие промежутки времени. Экономия энергоресурсов при применении преобразователей для управления асинхронными двигателями в некоторых случаях может достигать 40% и более.
На практике, применяются системы регулирования скорости трехфазных двигателей переменного тока на основе двух разных принципов управления:
1. U/f- регулирование (вольт-частотное или скалярное управление);
2. Векторное управление.
U/f- регулирование скорости асинхронного электропривода
Скалярное управление или U/f-регулирование асинхронным двигателем – это изменение скорости двигателя путем воздействия на частоту напряжения на статоре при одновременном изменении модуля этого напряжения. При U/f-регулировании частота и напряжение выступают как два управляющих воздействия, которые обычно регулируются совместно. При этом частота принимается за независимое воздействие, а значение напряжения при данной частоте определяется исходя из того, как должен изменяться вид механических характеристик привода при изменении частоты, т.е., из того, как должен меняться в зависимости от частоты критический момент. Для реализации такого закона регулирования необходимо обеспечить постоянство соотношения U/f=const, где U-напряжение на статоре, а f-частота напряжения статора.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
К законам U/f-регулирования можно отнести законы, связывающие величины и частоты питающего двигатель напряжения (U/f=const, U/f2=const и другие). Их достоинством является возможность одновременного управления группой электродвигателей. Скалярное управление используется для большинства практических случаев применения частотного электропривода с диапазоном регулирования частоты вращения двигателя без использования датчика обратной связи до 1:40. Алгоритмы скалярного управления не позволяют реализовать контроль и управление вращающим моментом электродвигателя, а также режим позиционирования. Наиболее эффективная область применения данного способа управления: вентиляторы, насосы, конвейеры и т.д.
Векторное управление
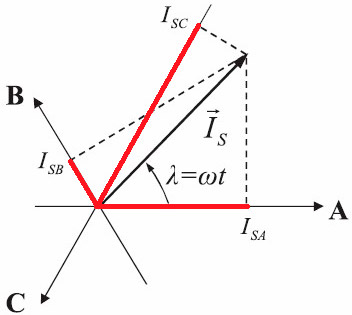
Векторное управление – это метод управления синхронными и асинхронными двигателями, не только формирующий гармонические токи и напряжения фаз (скалярное управление), но и обеспечивающий управление магнитным потоком двигателя. В основе векторного управления лежит представление о напряжениях, токах, потокосцеплениях, как о пространственных векторах.
Основные принципы были разработаны в 70-х годах 20 века. В результате фундаментальных теоретических исследований и успехов в области силовой полупроводниковой электроники и микропроцессорных систем, на сегодняшний день, разработаны электроприводы с векторным управлением, которые серийно выпускаются производителями приводной техники всего мира.
При векторном управлении в асинхронном электроприводе в переходных процессах имеется возможность поддерживать постоянство потокосцепления ротора, в отличие от скалярного регулирования, где потокосцепление ротора в переходных процессах меняется при изменении токов статора и ротора, что приводит к снижению темпа изменения электромагнитного момента. В приводе с векторным управлением, где потокосцепление ротора можно поддерживать постоянным, электромагнитный момент изменяется так быстро, как быстро изменяется составляющая тока статора (аналогия с изменением момента при изменении тока якоря в машине постоянного тока).
При векторном управлении в звене управления подразумевается наличие математической модели регулируемого электропривода. Режимы векторного управления можно проклассифицировать следующим образом:
1. По точности математической модели электродвигателя, используемой в звене управления:
• Использование математической модели без дополнительных уточняющих измерений устройством управления параметров электродвигателя (используются лишь типовые данные двигателя, введенные пользователем);
• Использование математической модели с дополнительными уточняющими измерениями устройством управления параметров электродвигателя, т.е. активных и реактивных сопротивлений статора/ротора, напряжения и тока двигателя.
2. По наличию или отсутствию обратной связи по скорости (датчика скорости) векторное управление можно разделить на:
• Управление двигателем без обратной связи по скорости – при этом устройством управления используются данные математической модели двигателя и значения, полученные при измерении тока статора и/или ротора;
• Управление двигателем с обратной связью по скорости – при этом устройством используется не только значения, полученные при измерении тока статора и/или ротора электродвигателя (как в предыдущем случае), но и данные о скорости (положении) ротора от датчика, что в некоторых задачах управления позволяет повысить точность отработки электроприводом задания скорости (положения) .
К основным законам векторного управления можно отнести следующие:
а. Закон обеспечивающий постоянство магнитного потокосцепления статора ψ1 (соответствующее постоянству Евнеш /f).
б. Закон, обеспечивающий постоянство магнитного потокосцепления воздушного зазора ψ0 (постоянство Е/f );
в. Закон, обеспечивающий постоянство магнитного потокосцепления ротора ψ2 (постоянство Евнут/f).
Закон поддержания постоянства потокосцепления статора реализуется при поддержании постоянного отношения ЭДС статора к угловой частоте поля. Основной недостаток такого закона – пониженная перегрузочная способность двигателя при работе на высоких частотах. Обусловлено это увеличением индуктивного сопротивления статора и, следовательно, снижением потокосцепления в воздушном зазоре между статором и ротором при увеличении нагрузки.
Поддержание постоянства главного потока повышает перегрузочную способность двигателя, но усложняет аппаратную реализацию системы управления и требует либо изменений конструкции машины, либо наличия специальных датчиков.
При поддержании постоянного потокосцепления ротора, момент двигателя не имеет максимума, однако при увеличении нагрузки увеличивается главный магнитный поток, приводящий к насыщению магнитных цепей и, следовательно, к невозможности поддержания постоянства потокосцепления ротора.
Сравнительная оценка законов регулирования скорости асинхронным электроприводом изменением частоты напряжения на статоре
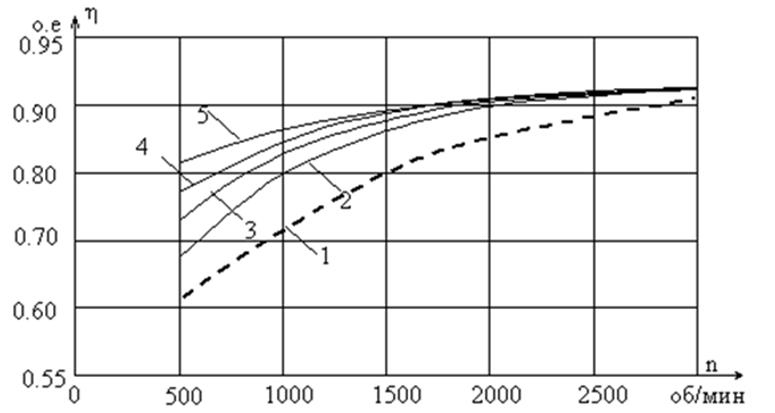
На рис.1 приведены результаты теоретических исследований энергетических показателей асинхронного двигателя мощностью Рн=18,5 кВт при различных законах частотного управления, которые проводились в работе В.С. Петрушина и к.т.н. А.А. Танькова «Энергетические показатели асинхронного двигателя в частотном электроприводе при различных законах управления». Там же даны результаты эксперимента, проведенного при испытании этого двигателя (закон частотного управления U/f = const). Двигатель работал на нагрузку с постоянным моментом 30,5 Нм в диапазоне скоростей 500 — 2930 об/мин.
Сопоставив полученные зависимости можно сделать вывод, что в зоне небольших скоростей при использовании законов управления второй группы КПД больше на 7-21%, а коэффициент мощности меньше на 3-7%. С увеличением скорости различия снижаются.
а)
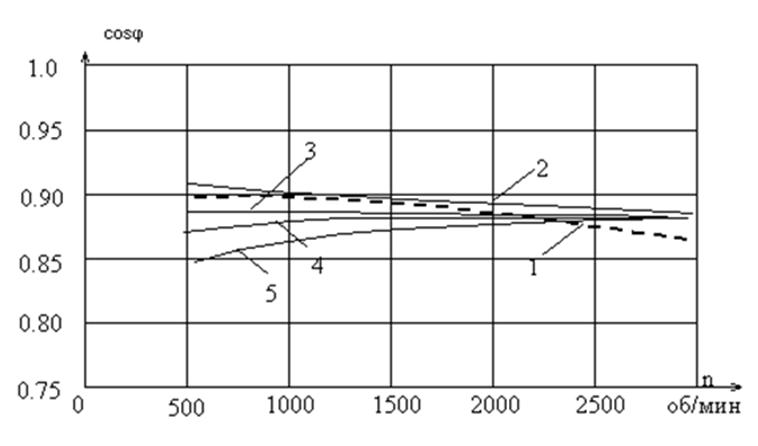
Рис.1. Изменение КПД (а) и cosφ (б) в диапазоне регулирования: 1 — экспериментальные зависимости; расчетные зависимости при разных законах управления: 2 — U/f = const, 3 — Евнеш /f = const, 4 — Е/f= const, 5 — Евнут /f= const.
Таким образом, законы векторного управления обеспечивают не только лучшее управление электроприводом в статических и динамических режимах, но и повышение КПД двигателя и, соответственно, всего привода. Однако все законы с поддержанием постоянства потокосцепления имеют свои определенные недостатки.
Общим недостатком законов с поддержанием постоянства потокосцепления являются: низкая надежность, обусловленная наличием датчиков, встраиваемых в двигатель, и потери в стали при работе двигателя с нагрузочным моментом меньше номинального. Эти потери вызваны необходимостью поддержания постоянного номинального потокосцепления в различных режимах работы.
Существенно повысить КПД двигателя можно путем регулирования магнитного потока статора (ротора) в зависимости от величины нагрузочного момента (скольжения). Недостатками такого управления являются низкие динамические характеристики привода, обусловленные большой величиной постоянной времени ротора, из-за чего магнитный поток машины восстанавливается с некоторой задержкой и сложность технической реализации системы управления.
На практике группа законов с постоянством магнитного потока получила распространение для динамичных электроприводов, работающих с постоянным моментом сопротивления на валу и с частыми ударными приложениями нагрузки. В то время как группа законов с регулированием магнитного потока в функции нагрузки на валу применяется для низкодинамичных электроприводов и для приводов с “вентиляторной” нагрузкой.