Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
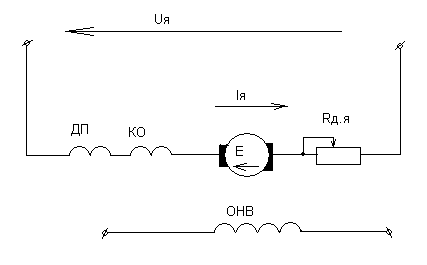 Рисунок — Схема включения двигателя постоянного тока независимого возбуждения. Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик. Для оценки различных способов регулирования скорости существуют следующие параметры:
Рисунок — Схема включения двигателя постоянного тока независимого возбуждения. Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик. Для оценки различных способов регулирования скорости существуют следующие параметры:
- Диапазон регулирования:
 это соотношение
это соотношение к
к , при которых работа привода при существующих нагрузках будет устойчивой;
, при которых работа привода при существующих нагрузках будет устойчивой; - Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования;
- Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии;
- Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
Запишем уравнение электромеханической характеристики:  , из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
, из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
 — введение в цепь якоря
— введение в цепь якоря ;
;- Изменением магнитного потока Ф;
- Изменением напряжения, подводимого к якорю
 .
.
-
Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
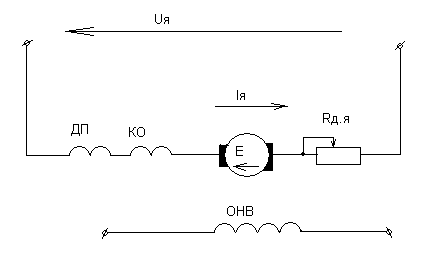
 Рисунок — Схема включения двигателя постоянного тока независимого возбуждения. Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик. Для оценки различных способов регулирования скорости существуют следующие параметры:
Рисунок — Схема включения двигателя постоянного тока независимого возбуждения. Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик. Для оценки различных способов регулирования скорости существуют следующие параметры:
- Диапазон регулирования:
 это соотношение
это соотношение к
к , при которых работа привода при существующих нагрузках будет устойчивой;
, при которых работа привода при существующих нагрузках будет устойчивой; - Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования;
- Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии;
- Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
Запишем уравнение электромеханической характеристики:  , из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
, из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
 — введение в цепь якоря
— введение в цепь якоря ;
;- Изменением магнитного потока Ф;
- Изменением напряжения, подводимого к якорю
 .
.
- Регулирование скорости изменением сопротивления якорной цепи.

 Р
Р егулирование скорости введением
егулирование скорости введением обеспечивает при
обеспечивает при снижение скорости двигателя.
снижение скорости двигателя.  Оценим приведенный способ регулирования:
Оценим приведенный способ регулирования:
- Диапазон регулирования не превышает 3:1, т.к. работа при низких скоростях нестабильна незначительное изменение МСможет вызвать остановку двигателя. С уменьшением МСуменьшается диапазон регулирования;
- Регулирование ступенчатое;
- Регулировать можно только вниз от основной скорости.
II. Регулирование скорости изменением магнитного потока.  Отметим, что изменение Ф возможно лишь в сторону уменьшения, т.е. в режиме, близком к номинальному, магнитная система двигателя насыщена. Уменьшение ФНприводит к увеличению
Отметим, что изменение Ф возможно лишь в сторону уменьшения, т.е. в режиме, близком к номинальному, магнитная система двигателя насыщена. Уменьшение ФНприводит к увеличению и увеличенной просадке скорости
и увеличенной просадке скорости .
. 
 Т.к.
Т.к.  , то при ослаблении поля электрического двигателя, приMC=const,IC. Оценим заданный способ регулирования:
, то при ослаблении поля электрического двигателя, приMC=const,IC. Оценим заданный способ регулирования:
- Диапазон регулирования для большинства двигателей (1,5…2):1
- Для двигателя независимого возбуждения можно обеспечить плавное регулирование.
- Регулирование экономичное, т.к. капитальные затраты и потер при этом невелики из-за невысокой мощности цепи возбуждения.
- Регулирование wвозможно только вверх от основной скорости.
- Регулирование скорости изменением подводимого напряжения.
 При изменении подводимого напряжения изменяется лишь скорость идеального Х.Х.
При изменении подводимого напряжения изменяется лишь скорость идеального Х.Х.  , поэтому все характеристики расположены параллельно друг другу и параллельно естественной характеристике.
, поэтому все характеристики расположены параллельно друг другу и параллельно естественной характеристике. 
 Оценим данный способ регулирования:
Оценим данный способ регулирования:
- Диапазон регулирования (20…30):1
- Регулирование скорости плавное
- Отличается экономичностью, т.к. энергия торможения возвращается в сеть
- Регулирование, как правило, вниз от основной скорости и лишь некоторые двигатели позволяют увеличить UЯвышеUЯН.
Судовой электрик — Регулирование скорости вращения двигателей постоянного тока
§ 33. РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Регулирование скорости вращения двигателя постоянного тока в соответствии с уравнением скорости возможно изменением сопротивления в цепи якоря, величины магнитного потока полюсов и величины подводимого к двигателю напряжения.
При введении в цепь якоря добавочного сопротивления скорость двигателя снижается. Скорость вращения двигателя при идеальном холостом ходе остается неизменной. Этот способ регулирования скорости получил распространение для всех типов двигателей.
Применение различных по величине добавочных сопротивлений позволяет получить семейство реостатных характеристик с различной степенью жесткости. Однако диапазон регулирования при таком способе сравнительно невелик. В добавочных сопротивлениях происходят значительные потери энергии, пропорциональные относительному изменению скорости. Сопротивления рассчитывают на полный ток нагрузки, поэтому они имеют большой вес и значительные габариты, неудобны в эксплуатации.
Однако этот способ регулирования скорости электродвигателей с параллельным и смешанным возбуждением применяют довольно широко в схемах электроприводов палубных механизмов.
Скорость вращения изменением величины магнитного потока регулируют реостатом, вводимым в цепь возбуждения двигателя. Возрастание величины сопротивления реостата вызывает уменьшение тока возбуждения Iв и, как следствие этого, уменьшение величины магнитного потока Ф. Скорость двигателя возрастет. По условиям коммутации и механической прочности увеличение скорости двигателя сверх номинальной возможно лишь в определенных пределах, поэтому диапазон регулирования ограничивается 3:1 — 4:1. Уменьшение магнитного потока в первый момент переключения скорости связано с некоторым броском тока, на который должны быть рассчитаны обмотки якоря электродвигателя.

В процессе эксплуатации двигателей с параллельным возбуждением необходимо следить за исправностью цепи возбуждения, для чего в цепь обмотки возбуждения включают реле обрыва поля или реле минимального тока.
Регулирование скорости вращения двигателя изменением величины подводимого к нему напряжения возможно лишь в том случае, если двигатель получает питание от отдельного источника электроэнергии. В судовых условиях применяют специальную систему генератор — двигатель (Г—Д), описание которой дается в § 43.
Скорость вращения двигателя с последовательным возбуждением регулируют введением регулировочного сопротивления в цепь якоря, шунтированием обмотки якоря или обмотки возбуждения (рис. 51).
Рис. 51. Регулирование скорости вращения электродвигателя постоянного тока с последовательным возбуждением шунтированием обмотки якоря или обмотки возбуждения
При введении в цепь якоря регулировочного сопротивления скорость вращения двигателя с последовательным возбуждением, регулируют примерно так же, как и у двигателя с параллельным возбуждением. Для этого способа регулирования скорости вращения двигателя характерны те же недостатки.
Регулирование скорости вращения шунтированием обмотки якоря возможно лишь в сторону уменьшения скорости двигателя. В первый момент после включения шунтирующего сопротивления ток в якоре двигателя уменьшается, так как часть его ответвляется в шунтирующее сопротивление. Диапазон регулирования возможен до 5:1.
Способ неэкономичен, однако в судовых условиях он применяется для электроприводов, работающих по экскаваторным характеристикам.
Регулирование скорости вращения шунтированием обмотки возбуждения позволяет увеличивать скорость вверх от номинальной. Часть тока возбуждения ответвляется в сопротивление шунта, намагничивающий ток уменьшается и скорость вращения увеличивается, как это следует из уравнения скорости.
При этом способе регулирования подводимая к двигателю мощность Р1, как и полезная мощность P2, несколько увеличивается, а к. п. д. двигателя остается без изменения. Потери в шунтирующем сопротивлении невелики, и способ достаточно экономичен, но диапазон регулирования не превышает 2:1.
Скорость вращения двигателей постоянного тока со смешанным возбуждением регулируется теми же способами, что и двигателей с параллельным возбуждением: введением регулировочного сопротивления в цепь якоря двигателя, шунтированием обмотки якоря двигателя, введением в цепь параллельного возбуждения регулировочного реостата.
Способы регулирования скорости вращения электродвигателей постоянного тока

Регулирование скорости вращения электродвигателей постоянного тока
Из уравнения скоростной характеристики электродвигателей постоянного тока следует, что их скорость можно регулировать:
а) изменением сопротивления якорной цепи R при помощи реостата в цепи якоря;
б) изменением магнитного потока возбуждения Ф (при помощи реостата в цепи возбуждения);
в) изменением величины напряжения U, подводимого к двигателю (за счет применения специальных схем включения).
1. Электродвигатели с параллельным возбуждением
Регулирование скорости вращения изменением сопротивления в цепи якоря. Как видно из механических характеристик, вводя дополнительное сопротивление в цепь якоря, можно регулировать скорость вниз от номинальной скорости двигателя, представленной естественной характеристикой. Жесткость характеристик уменьшается по мере увеличения добавочного сопротивления. Диапазон регулирования скорости не превышает 2 : 1, т. е. предел регулирования равен 50% вниз от основной скорости.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
- Оказание первой помощи пострадавшим от поражения электрическим током
- Требования техники безопасности, выполнение которых обязательно при эксплуатации электроустановок
- Общие меры безопасности при эксплуатации электрических установок
- Классификация помещений по степени опасности поражения электрическим током
- Действие электрического тока на организм человека
- Техника безопасности при эксплуатации электрооборудования
- Особенности электроснабжения установок с электрифицированным инструментом
- Преобразователи частоты и понижающие трансформаторы
- Электропривод компрессоров
Настоящий способ регулирования скорости может быть легко осуществлен, однако он имеет ряд существенных недостатков, ограничивающих его применение: значительные потери энергии в регулировочном реостате; диапазон регулирования скорости непостоянен и зависит от нагрузки; невозможность регулирования при малых нагрузках.
В отличие от пускового реостата регулировочный реостат должен быть рассчитан на длительную работу при полном токе нагрузки, поскольку он оказывается включенным не только кратковременно во время пуска, но и во время работы двигателя на заданной скорости.
Регулирование скорости вращения изменением тока возбуждения (величины магнитного потока). Из рассмотрения механических характеристик видно, что, вводя дополнительное сопротивление в цепь возбуждения, можно регулировать скорость вращения двигателя вверх от номинальной его скорости. Жесткость механических искусственных характеристик при этом мало изменяется. Диапазон регулирования скорости для регулируемых таким методом двигателей составляет от 1,5 : 1 до 4 : 1. Обычно в каталогах указывается величина максимально допустимого числа оборотов двигателя. Данный способ регулирования скорости является одним из наиболее простых и экономичных, что определяет его широкое применение.
2. Электродвигатели с последовательным возбуждением
Регулирование скорости вращения изменением сопротивления в цепи якоря. Как видно из механической характеристики двигателя, вводя дополнительное сопротивление в цепь якоря, можно регулировать скорость вниз от номинальной скорости двигателя. Жесткость характеристики уменьшается по мере увеличения дополнительного сопротивления. Диапазон регулирования скорости не превышает 2:1, 3:1 и зависит от нагрузки.
Регулирование скорости рассмотренным методом связано с большими потерями энергии в регулировочном реостате, но несмотря на это, данный способ находит применение в крановых установках и электротележках ввиду своей простоты. Указанные механизмы работают со значительными перерывами, что уменьшает потерю энергии на нагрев сопротивлений реостатов.
Регулирование скорости вращения изменением магнитного потока возбуждения. Для двигателей с последовательным возбуждением применяются два основных способа регулирования скорости изменением магнитного потока Ф, а именно, путем шунтирования либо обмотки возбуждения, либо обмотки якоря.
При шунтировании обмотки возбуждения реостатом Яш (рис. 16) часть тока, проходящего по якорю двигателя, ответвляется в реостат, вследствие чего величина тока в обмотке возбуждения, а следовательно, и магнитного потока, создаваемого ею, уменьшается и скорость двигателя возрастает. При уменьшении величины сопротивления шунтирующего реостата искусственные скоростные характеристики на рис. 16 располагаются выше естественной характеристики. Таким образом, регулирование скорости этим методом происходит в сторону ее повышения по отношению к номинальной скорости. Предел регулирования скорости вращения двигателя не поевышает 2 : 1 при условии постоянства мощности. При постоянном нагрузочном моменте диапазон регулирования еще ниже.
Рис. 16. Схема регулирования скорости электродвигателя последовательного возбуждения шунтированием обмотки возбуждения
а —схема; б — скоростные характеристики
При уменьшении величины сопротивления шунтирующего реостата увеличивается ток, протекающий по обмотке возбуждения, вследствие чего искусственные скоростные характеристики (рис. 17,6) двигателя рас полагаются ниже естественной характеристики. При переходе скорости вращения за пределы отрицательных моментов двигатель не отдает энергии в сеть, но работает генератором на шунтирующее сопротивление, так как э. д. с. двигателя не может быть больше приложенного напряжения сети. Таким образом, регулирование скорости этим методом происходит в сторону понижения по отношению к номинальной скорости. Возможен диапазон регулирования скорости (4—5) : 1. Регулирование скорости шунтированием обмотки якоря применяется в тех случаях, когда необходимо получить характеристики на низких скоростях, более жесткие, чем при реостатном регулировании. Этот метод регулирования скорости сопровождается значительной потерей энергии в шунтирующем реостате. Он находит применение в электроприводах, требующих получения низких скоростей на короткое время.
Рис. 17. Схема регулирования скорости электродвигателя последовательного возбуждения шунтированием обмотки якоря
а — схема; б — скоростные характеристики
3. Специальные схемы включения электродвигателей постоянного тока (система генератор — двигатель, ионный привод, привод с магнитным усилителем)
Для ряда производственных механизмов диапазон регулирования скорости рассмотренными выше способами оказывается недостаточным. Более широкое регулирование скорости возможно за счет изменения величины подводимого к двигателю напряжения. При этом он должен иметь независимое возбуждение. Регулирование скоростей в этих условиях возможно в широких пределах вверх и вниз от естественной характеристики. Понижение подводимого к двигателю напряжения вызывает смещение механических характеристик к оси абсцисс, повышение —смещение их в обратном направлении.
Регулирование скорости вращения путем изменения напряжения осуществляется при включении электродвигателей по особым схемам с питанием их либо от специального генератора с регулируемым напряжением, либо от ионных преобразователей. Такие способы регулирования скорости отличаются высокой экономичностью, большой плавностью регулирования и возможностью использовать генераторное торможение с отдачей энергии в сеть. Основной его недостаток заключается в необходимости иметь дополнительное электрооборудование (генераторы, сетевой двигатель и др.), позволяющее изменять величину подводимого к двигателю напряжения.
Принципиальная схема системы Г—Д приведена на рис. 18. Основными элементами оборудования являются: ПД— асинхронный или синхронный приводной двигатель, вращающий генератор Г и возбудитель В; Д — двигатель исполнительного механизма.
Рис. 18. Принципиальная схема привода постоянного тока по системе генератор — двигатель (Г — Д)
Механические характеристики электропривода по системе Г—Д представлены на рис. 19. Характеристики, полученные при различных токах возбуждения генератора путем изменения сопротивления реостата возбуждения Rr , расположены в нижней части рисунка. Характеристики при неизменной величине э. д. с. генератора и различных потоках возбуждения двигателя, получаемые воздействием на реостат возбуждения двигателя RB. д, расположены в верхней части рисунка. Эти характеристики не Параллельны между собой, поскольку перепад скорости вращения, обратно пропорциональный потоку возбуждения, будет для одного и того же момента различным при разных токах возбуждения двигателя.
Рис. 19. Механические характеристики электропривода постоянного тока по системе генератор — двигатель
Перед пуском в ход двигатель исполнительного механизма в системе Г—Д (см. рис. 18) должен иметь полное возбуждение [(RB. д=0), а группа «приводной двигатель—генератор» должна находиться во вращении со снятым с генератора возбуждением. Далее, путем постепенного повышения напряжения генератора (уменьшая сопротивления его реостата возбуждения Rг ) двигатель исполнительного механизма плавно доводят до номинальной скорости.
В зависимости от требуемого направления вращения двигателя пуск осуществляется замыканием контакторов KB или КН (с помощью специальной аппаратуры).
Применяемый в системе Г—Д метод пуска весьма экономичен, так как в главной цепи якоря машины отсутствуют пусковые сопротивления. Поскольку управление пуском осуществляется в цепи возбуждения генератора, обладающей сравнительно малой мощностью (2— 6% номинальной мощности генератора), применяемая аппаратура управления имеет малые габариты, вес и стоимость.
Для того чтобы вызвать тормозной режим двигателя в системе Г—Д с последующей его остановкой, достаточно разомкнуть контакты контакторов KB и КН. Цепь возбуждения генератора будет отключена от питающей сети, однако ток возбуждения генератора не исчезнет мгновенно ввиду наличия разрядного сопротивления Rp, шунтирующего обмотку возбуждения генератора. В обмотке возбуждения генератора будет наводиться э. д. с. самоиндукции и тем самым поддерживаться ток в цепи, замкнутой на разрядное сопротивление.
Так как поток возбуждения двигателя исполнительного механизма остается неизменным, то его э. д. с. будет больше, чем уменьшающаяся э. д. с. генератора.
В результате этого двигатель начинает работать в режиме генератора за счет кинетической энергии вращающихся масс, а генератор — в режиме двигателя. Поскольку поток возбуждения генератора непрерывно уменьшается, его скорость, а следовательно, и скорость вращения приводного двигателя ПД будет возрастать. Когда она превысит синхронную скорость двигателя ПД, последний начнет работать в генераторном режиме с отдачей электроэнергии в сеть. Отдача электроэнергии в сеть продолжается вплоть до полной остановки двигателя.
Если торможение механизма по условиям производственного процесса производится часто, то данный метод торможения представляет значительную экономическую выгоду.
Рассматриваемая система прйвоДа позволяет иметь широкий диапазон регулирования до 100 : 1 с плавным изменением скорости, получить специальные, так называемые экскаваторные механические характеристики двигателей механизмов, работающих на упор, например механизм напора мощных экскаваторов.
В современных электроприводах, выполненных по системе Г—Д, наибольшее распространение в качестве возбудителей генераторов получили электромашинные усилители с поперечным полем. Применяются также магнитные и электронные усилители.
Электромашинный усилитель дает возможность управлять мощными установками посредством аппаратов и машин малой мощности. Эти же свойства усилителя за счет введения обратных связей по току, напряжению или скорости позволяют в некоторых приводах поднять диапазон регулирования скорости до 200 : 1.
Ниже рассматривается принцип действия электромашинного усилителя (ЭМУ) с поперечным полем (рис. 20). Электромашинный усилитель приводится в действие асинхронным двигателем, который монтируется в одном корпусе с усилителем. Первая пара щеток ЭМУ аа замыкается накоротко, ко второй паре 66 подсоединяется внешняя нагрузка, обычно обмотка возбуждения генератора.
Конструктивные особенности ЭМУ позволяют в том же пространстве, где расположена обмотка ОУ, разместить еще несколько обмоток управления без значительного увеличения габаритов. С помощью дополнительных обмоток управления обычно осуществляются обратные связи.
Величина коэффициента усиления по мощности электромашинных усилителей с попеоечным полем составляет 4000— 10000.
Диапазон регулирования скорости двигателя в рассмотренной схеме без обратной связи равен 1 : 7, а с обратной связью для той же системы он составляет 1 : 33.
В случае необходимости регулирования скорости оператор перемещает скользящий контакт реостата Ra. у в цепи обмотки управления ЭМУ. Применяя ЭМУ с обратными связями, можно получать жесткие механические характеристики.
Недостатки, отмечавшиеся для привода по системе Д, в значительной мере устраняются при питании приводных двигателей постоянного тока от ионных и полупроводниковых преобразователей. Для приводов небольшой мощности используются тиратроны, а для приводов большой мощности — мощные управляемые ртутные вентили, а также полупроводниковые вентили — тиристоры.
Рис. 21. Схема электропривода по системе генератор — двигатель с электромашинным усилителем в качестве возбудителя
Систему, состоящую из двигателя постоянного тока и питающего его ионного преобразователя, называют ионным приводом. Ионный преобразователь в такой системе выполняет не только функции выпрямления переменного тока, но и функции управления двигателем, т. е. пуск, регулирование скорости, торможение и т. п. Достигается это изменением величины напряжения на стороне выпрямленного тока при помощи сеточного управления, регулирующего момент зажигания дуги в вентилях.
Принцип сеточного регулирования основан на том. что при наличии на сетке отрицательного (запирающего) напряжения дуга на главных анодах не зажигается и ток от анода к катоду не проходит.
Принципиальная схема ионного привода с тиратронами представлена на рис. 22. Двигатель постоянного тока Д получает питание через три тиратрона, включенных во вторичную цепь трансформатора Тр. Тиратроны, как и ртутные вентили, обычно включаются в сеть через трансформаторы. Наличие трансформаторов объясняется необходимостью получения напряжения
требуемой величины на стороне выпрямленного тока. Двигатель. подключен к нулевой точке трансформатора 0 и общей точке катодов тиратронов К. Для сглаживания пульсации тока в цепь двигателя включена реактивная катушка-дроссель ДР.
Как указывалось, регулирование сеточного напряжения производится фазорегулятором ФР. Там же между сетками и фазорегулятором включены так называемые пиковые трансформаторы ПТр, дающие возможность получить более резкие изменения напряжения на сетке, а отсюда более четкую фиксацию момента зажигания тиратрона. Цепи накала тиратронов присоединяются к отдельным обмоткам трансформатора, не показанным на схеме.
Механические характеристики системы ионный преобразователь— двигатель подобны характеристикам системы генератор—двигатель с некоторым искажением в зоне, близкой к холостому ходу двигателя. Для повышения жесткости механических характеристик и увеличения диапазона регулирования скорости вращения двигателя в этих системах используют обратные связи по току и напряжению якоря двигателя.
Рис. 22. Схема ионного привода (с тиратронами и фазорегулятором)
Применение системы с ионными преобразователями экономичнее по стоимости, чем системы с вращающимися преобразователями, требует меньшей площади производственного помещения, кроме того, данная система имеет более высокий к. п. д. и практически безынерционное сеточное управление. Основным недостатком ионных преобразователей является низкий коэффициент мощности, который снижается при глубоком регулировании, примерно пропорционально уменьшению скорости вращения.
В последние годы были разработаны полупроводниковые (кремниевые) управляемые вентили — тиристоры, которые по своим функциям в схемах преобразователей аналогичны тиратронам. Тиристоры, очевидно, найдут в будущем широкое применение для приводов средней и большой мощности вместо тиратронов и управляемых ртутных вентилей.
В приводах малой и средней мощности в настоящее время стали широко применять систему регулирования скорости двигателя с помощью магнитных усилителей. Принцип действия магнитного усилителя основан на явлении изменения индуктивного сопротивления переменного тока путем изменения подмагничивания сердечников постоянным током. Имеются приводы с магнитными усилителями, питающимися от сетей однофазного и трехфазного тока. Комплектные установки с магнитными усилителями, выпускаемые промышленностью мощностью от 0,1 до 8 кет, позволяют получать диапазон регулирования скорости порядка 10 : 1 при плавном регулировании. Они надежны в эксплуатации и имеют высокий к. п. д.
Механические характеристики двигателя при таком способе регулирования скорости — мягкие вследствие значительного снижения напряжения на обмотке якоря с увеличением нагрузки двигателя.
Магнитные усилители могут иметь несколько обмоток управления и регулировать функции нескольких параметров. Они обладают большим коэффициентом усиления по мощности. Существенным недостатком привода с магнитным усилителем является его значительная инерционность: при резком изменении нагрузки на валу двигателя могут возникнуть колебания скорости и новое установившееся состояние наступает только спустя 0,2—2 сек.
Рис. 23. Схема электропривода с магнитным усилителем
Способы регулирования скорости вращения электродвигателей постоянного тока
Мы предлагаем реверсивные мотор-редукторы, которые состоят из коллекторного электрического двигателя постоянного тока и редуктора. Сам двигатель состоит из якоря (ротора с якорной обмоткой), статора с постоянными магнитами и щёточного узла. Редуктор служит для уменьшения частоты вращения и соответствующего увеличения вращающего момента.
Блоки управления коллекторными двигателями
Блоки управления предназначены для управления работой коллекторных двигателей постоянного тока с напряжением питания до 24В. Блоки управляют скоростью, направлением и активным торможением мотор-редукторов постоянного тока, обеспечивают плавный пуск и остановку двигателя.
Источники питания
Стабилизированные источники питания постоянного тока — для питания приводов постоянного тока: коллекторных двигателей, шаговых приводов, бесколлекторных двигателей, а также для других устройств и приборов. Параметры предлагаемых источников питания:
- Мощность: 5Вт. 1000Вт
- Зашита от короткого замыкания — длительное время, защита от перегрузки по току, защита от перенапряжения
Мотор-редукторы переменного тока
Мотор-редукторы производства DKM комплектуются цилиндрическими или червячным редуктором, могут поставляться с регулятором скорости, с тормозом и электромагнитной муфтой. Питание двигателей 220 В 50/60 Гц однофазное. Мощность 10. 180Вт.
Мотор-редукторы EMW — асинхронные трехфазные двигатели с червячным редуктором. Мощность 0,9. 3,0кВт
Частотные преобразователи — блоки управления асинхронными двигателями переменного тока
Частотные преобразователи используется для управления асинхронными двигателями переменного тока.
Преобразователи частоты Powtran серии PI8100а с векторным управлением применяются для управления трёхфазными мотор-редукторами EMW и асинхронными трёхфазными двигателями других марок.
Вентильные двигатели (бесколлекторные двигатели постоянного тока)
Мы предлагаем бесколлекторные (вентильные) двигатели постоянного тока с выходной мощностью до 660Вт. Все предлагаемые бесколлекторные двигатели с датчиками Холла, установленными под углом 120°.
Блоки управления вентильными двигателями
Блоки управления предназначены для работы с бесколлекторными двигателями постоянного тока с напряжением питания до 48В. Блоки управляют скоростью, направлением и активным торможением двигателей, обеспечивают плавный пуск и остановку двигателя. Предусмотрен аналоговый задатчик скорости — внешний сигналом (0. +5)В или встроенный потенциометр.
Упс, что-то пошло не так
Страница, которую вы запрашиваете не существует или допущена ошибка в адресе